
Fターム[3E054FC09]の内容
包装位置への供給−物品の供給 (7,769) | 物品の取扱い(姿勢変更) (699) | 姿勢変更時期 (160) | コンベア間の移載中 (21)
Fターム[3E054FC09]に分類される特許
1 - 20 / 21
物品供給方法およびその装置
【課題】複数品種の袋体を詰め合わせる。
【解決手段】第1袋体10が所定数連なった第1連包体12と、第1袋体10と異なる品種の物品が包装された第2袋体14が所定数連なった第2連包体16とを夫々形成する。各連包体12,16を、袋体10,14が重なるように折り重ね手段26,28で折り重ねる。折り重ね手段26,28から移送手段30,32で移送された連包体12,16を集合させて、供給コンベヤ34によって横形製袋充填機の充填位置Zへ向けて移送する。
(もっと読む)
包装体の集積装置

【課題】搬送供給装置において包装体を高速かつ確実に移送装置へと供給する包装体の集積装置を提供する。
【解決手段】自動包装機から排出された包装体1を搬送供給する搬送供給装置2と、搬送供給装置2から供給された包装体1をホルダ部材33に収容して移送する移送装置3と、移送装置3にて移送された包装体1を複数のホルダ部材33・33・・・から一度に搬出する搬出装置4と、を具備してなる包装体1の集積装置100において、搬送供給装置2は、包装体1の搬送経路に沿って延設され、包装体1が載置されるガイド部材20と、ガイド部材20に沿って移動可能に配設され、ガイド部材20よりも上方に突出された突出部21aにて包装体1を押動して搬送する押動部材21と、を有してなり、ガイド部材20の端部が下方湾曲され、押動部材21にて下方に押動されながらホルダ部材33へと包装体1が供給される。
(もっと読む)
箱詰システム
【課題】箱詰めされる物品列の搬送中に物品列の姿勢を乱すことなく、かつ、物品列の姿勢を整えながら、物品列を搬送して箱詰めの充填効率を向上させる。
【解決手段】複数の物品M同士の側面が互いに接触して複数の物品が一列に並んだ物品列の底部を下方から支持する搬送面65と、物品列における側面に隣接する後端Mdを前方に向かって押すことで、搬送面上の物品列を搬送する押し部61と、搬送面上を搬送される物品列における搬送方向に直交する幅方向の両端の側面に接触して物品列を案内する一対の案内板80と、物品列から一部の物品が前方に突出するのを抑制する矯正部9とを備える。矯正部は、物品列の前端Mfに接触することが可能なバー91と、バーの端部においてバーに連なり水平軸線の回りに回転する一対のアーム92と、バーが接触位置PTと退避位置PAとの間を移動するようにアームを回転駆動させる第1駆動部63とを有している。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
集積供給システム
【課題】物品の形状や包装態様に関係なく、包装機に物品を供給できる集積供給システムを提供する。
【解決手段】集積供給システム12は、複数の物品XA1を外包機11に向けて搬送するベルトコンベア14と、ベルトコンベア14と協働するアームコンベア15と、物品XA1を外包機11に向けてガイドするガイドユニット16と、等を備えている。ガイドユニット16は、ベルトコンベア14のベルト33上に通路を形成する一対の外側ガイド部材46,47と、外側ガイド部材46,47に形成される通路を仕切って複数の小通路に分割する中間ガイド部材48〜52と、等を備えている。外側ガイド部材46,47は、外包機11に向かうに連れて互いの間隔が狭小となるようにベルトコンベア14の筐体45に取り付けられる。アームコンベア15は、ベルトコンベア14と共に、ベルト33に置かれた物品XA1を搬送するアーム57等を備えている。
(もっと読む)
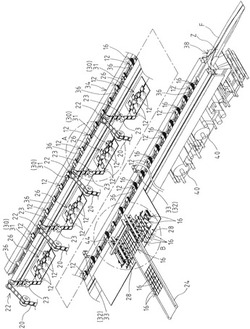
袋体の集積搬送方法及びその装置
【課題】流動性のある内容物を内包した扁平な袋体を前後に交互にずらした積層状態で包装装置に供給する。
【解決手段】複数の搬送路B2を有して前記袋体wを寝かせた状態で搬送する第1搬送手段Bと、該第1搬送手段で搬送した袋体の姿勢を縦に起立させる姿勢変更手段Dと、該第1搬送手段と同数で高さが上下2段に交互に形成された搬送路C2a,C2bを有して起立した該袋体の高さを交互に上下にずらして所定数ずつ横一列に並べて搬出端に搬送する第2搬送手段Cと、該第2搬送手段の搬出端に並ぶ上段側の袋体のみに先行して当接する押送片E2aと下段側にある袋体に後行して当接する押送片E2bとを有して上段側の袋体を下段側よりも所定長前方に押し出して交互に前後にずらして押送する第3搬送手段Eと、該第3搬送手段の後端に送られた袋体をその高さ位置を揃えて積層させた状態で包装装置Gに供給する第4搬送手段Fとを備える。
(もっと読む)
箱の搬送姿勢変更装置およびその方法
【課題】箱を転倒しやすい状態で搬送する場合、何らかの転倒防止機構を組み込む必要があり、設備コストが増大するなどの不具合がある。
【解決手段】ティシュカートン11の搬送姿勢を変更するための本発明の装置は、前後面26が上下方向を向くようにティシュカートン11が導かれる搬入端部38bおよび搬出コンベヤ35の搬入端35aに接続する搬出端部38aを有するテーブル38と、下端部がテーブル38の搬入端部38bの上方に位置すると共に上端部が搬入コンベヤ34の搬出端34aに接続し、前後面26が搬送方向の前後を向くように搬入されるティシュカートン11をその前後面26が上下方向を向くようにテーブル38の搬入端部38bに導くシュート39と、テーブル38の搬入端部38bに導かれたティシュカートン11を搬出端部38aに向けてそのままの姿勢で押し出すための送出手段40とを具える。
(もっと読む)
箱のパック詰め方法
【課題】箱を転倒しやすい状態で搬送する場合、何らかの転倒防止機構を組み込む必要があり、設備コストが増大するなどの不具合がある。
【解決手段】高さhと奥行dと幅wとがh<d≦wの関係にある直方体形状の箱11の奥行と幅とで画成される面が重なり合うように、同一寸法形状の箱11を複数個ずつ積み重ねてパック詰めする本発明の方法は、箱11の奥行と幅とで画成される面12を上下方向に向けた箱11の搬送中に箱11に内容物25を入れて箱11を塞ぐステップと、箱11の高さと幅とで画成される面27を上下方向に向けた状態で箱11をその搬送方向に沿って密着させるステップと、密着状態にある箱11を複数個ずつ取り出してパック詰めを行うステップとを具え、箱11の高さと幅とで画成される面27を上下方向に向けて密着させるステップが箱11のパック詰めを行うステップの直前に行われる。
(もっと読む)
フォーマットされたトータルパッケージを形成するための方法及び装置
本発明は、コンベヤベルト上で搬送される、互いに当接し、同サイズの、特に食品によって形成された所定の数の個々の堆積物から成るフォーマットされたトータルパッケージを形成するための方法と装置とに関わる。第1のコンベヤベルト上の前記個々の堆積物は、緩衝ラインを形成し搬送方向で第1のコンベヤベルトに隣接している第2のコンベヤベルトに、互いに所定の間隔を空けて所定の速度VB1で供給される。前記個々の堆積物は、前記第2のコンベヤベルトの始まりの部分で、互いに当接した個々の堆積物から成る緩衝堆積物へと堆積され、これら緩衝堆積物は、前記第2のコンベヤベルト上で、VB1より低速の速度VB2で搬送される。前記第2のコンベヤベルトの一端部で、トータルパッケージが、送出用のコンベヤベルトによって、VB2より高速の速度VB4で、前記緩衝堆積物から分離される。前記個々の堆積物の堆積及び/もしくは分離の工程の間に搬送方向に移動される遷移部が、前記コンベヤベルト間に配置されている。 (もっと読む)
出荷トレイ装填装置
【課題】回転テーブルによる微小物体の搬送途中に姿勢を補正する構成であると、該回転テーブルのさらなる高速化が望めない点を解消する。
【解決手段】(出荷トレイ)装填装置1は、複数の未整列トレイMTと、これら複数の未整列トレイMTの各々の上方に設けられたカメラC0と、これら複数のカメラC0による撮像データに基づいて各々の未整列トレイMT上の微小物体(ワークW)をそれぞれ把持して整列させる複数の補正機構と、これら補正機構によって整列された微小物体が整列状態で載置されるバッファBと、このバッファBの微小物体の載置面及び出荷トレイSTの微小物体の送り出し面に亘って微小物体を移動させる回転テーブル4と、を有する。
【効果】複数の未整列トレイからバッファに至るまでに微小物体を整列させて送るから、回転テーブルの回転速度をさらに高速化できる。
(もっと読む)
菓子などの移乗配列装置
【課題】上流側から順次送り込まれてくる菓子などを、走行中の配列コンベア上に複数列の縦列に横一列に配列可能とする菓子などの移乗配列装置を提供することである。
【解決手段】菓子などを一列縦隊に順次送り込むと共に鉛直軸を支点として水平方向に首振り自在な旋回コンベア1と、横移動自在であり、下流側のベルトの折り返し部となるベルト受け部が菓子などの搬送方向に水平移動自在とされる分配コンベア2を介して、下流側の配列コンベアB上に複数列の縦列に配列すると共に、前記配列コンベアのコンベア速度と、前記分配コンベアのコンベア速度と、菓子などを送り込むタイミングとから、走行中の配列コンベア上に横一列に整列すると共に複数列の縦列に順次配列するように、前記分配コンベアの横移動と前記ベルト受け部の水平移動とを制御する制御装置50を備える構成とした。
(もっと読む)
板状電子部品の整列方法とそれに用いる整列装置
【課題】厚みの薄い電子部品であっても、割れや破損を生じることなく、確実に位置決めして整列することができる整列方法とそれに用いる整列装置を提供する。
【解決手段】板状電子部品9の整列方法であって、前記板状電子部品9の一面を吸引保持して懸架する第一の工程と、前記板状電子部品9の一辺を、その側面から押圧することでこの板状電子部品9を移動させて位置決め、整列させる第二の工程とからなり、前記第二の工程は、板状電子部品9の対向する二辺を順次押圧して移動させることで、第一の方向の位置決めを行った後、前記二辺に直交する他の二辺を順次押圧して移動させることで、前記第一の方向に直交する第二の方向の位置決めを行うものである。
(もっと読む)
集積装置
【課題】 コンパクトで高速処理が可能であり、高密度に安定して包装物を集積できる集積装置を提供する。
【解決手段】 搬送機構3による包装物1の搬送方向に沿った複数箇所に定ピッチPでプッシャー4a〜4jを配置する。このプッシャー4a〜4jは、エアシリンダ51で搬送面34に対して突出・退入可能とし、かつ水平駆動機構52で搬送方向に同期移動可能に構成する。搬送面上に平置きされた包装物1をプッシャー4a〜4jで押し上げて傾斜姿勢に変換した後、プッシャーを搬送方向に同期移動させて前記ピッチPを縮小し、包装物1を集積する。
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
自動カートンマガジン積載システム
カートンを包装機へ供給するために、マスフィーダーのマガジンへカートンの積層を自動的に積載するマガジンローダー(10)は、カートンの積層が受け取られ保持されるローダー(30)と、該ローダー(30)が枢動可能に搭載されたキャリッジ(19)とを含む。カートンは、ローダーが積載位置から積層位置へ枢動した後、ローダー(30)に受け取られ積載される。その後、ローダー(30)は、包装機へ供給するためのカートンの供給を維持するために、カートンの積層が受け取られ、予め積載されたカートンに対して積層されるまで、マガジン、または予め積層されたカートンの供給に向け、包装機に対しフィーダーコンベヤ(12)に沿って移動する。  (もっと読む)
(もっと読む)
搬送装置
【課題】受入位置で物品を位置決めして受け入れることができ、もって集積姿勢が乱れることのない搬送装置を提供する。
【解決手段】受渡装置12は、受入位置P1において所定の受入姿勢で上流側の搬入コンベア11から1個ずつ物品Xを受け入れて、起立姿勢方向に回動することにより該物品Xを起立させると共に、集積搬送装置13に備えられたバケット44,45に該物品Xを受け渡す受渡台24…24を備える。その場合、受渡台24を、受入姿勢が水平姿勢から反回動方向d′へ角度αだけ傾斜した姿勢となるように構成すると共に、傾斜により低くなる側に、受け入れた物品Xの移動を規制する移動規制壁を設ける。
(もっと読む)
搬送装置及びそれを備えた計量梱包システム
【課題】受入位置で物品を安定した姿勢で受け入れることができ、もって集積姿勢が乱れることのない搬送装置及びそれを備えた計量梱包システムを提供する。
【解決手段】受入位置P1で搬入コンベア6から供給された物品Xを受け入れて下流側の集積搬送装置12へ受け渡す受渡装置7に、受入位置P1においてほぼ水平姿勢で1個ずつ物品Xを受け入れたのち、起立姿勢方向に回動して該物品Xを起立させると共に、集積搬送装置12のバケット44に該物品Xを受け渡す受渡台24…24を備え、かつ、該受渡台24…24の載置面を櫛歯状として隙間を設ける。そして、受け入れた物品Xを該隙間を介して載置面に吸引保持する吸引機構33を備え、この吸引機構33を、吸引ポンプ34と配管35と吸引口が設けられた吸引箱36とで構成する。
(もっと読む)
容器搬送装置
【課題】 容器そして内容物を傷めることなく高能率で容器を受授できる容器搬送装置を提供することを目的とする。
【解決手段】 第一コンベア装置10と第二コンベア装置20は容器Pを支持しながら搬送するそれぞれの搬送部が定速で連続走行し、中間受渡装置30は、第一コンベア装置と第二コンベア装置のそれぞれの搬送部の搬送範囲の一部L1,L2にて、これらの搬送部に対して交互に同速で並走することを繰り返し、中間受渡装置30の第一コンベア装置10との並走時に該第一コンベア装置10の搬送部が容器に対する支持力を開放して容器Pの落下を可能とすると共に中間受渡装置30の受部33,34がこの落下容器Pを受け、中間受渡装置30の第二コンベア装置20との並走時に上記中間受渡装置30の受部が解放されて容器Pを落下せしめて第二コンベア20の搬送部がこの落下容器Pを受けるようになっている。
(もっと読む)
物品保持装置
【解決手段】 物品保持装置は、複数の物品1が載置されるコンベヤ(載置手段)4と、支持部材14に設けられてそれぞれ上記コンベヤ上の物品を保持する複数のグリッパ(保持手段)15A、15Bと、上記支持部材を昇降移動させるロボット(駆動手段)11と、それらを制御する制御装置16とを備えている。上記制御装置は、空の第2グリッパ15Bで物品1を保持する際には、既に他の第1グリッパ15Aで保持されている物品の下面がコンベヤ4に当接しない高さ位置に上記支持部材14を位置制御した状態で、上記第2グリッパ15Bで物品を保持させるようになっている。
【効果】 従来は、グリッパで保持されている物品の下面がコンベヤに当接しないように各グリッパを昇降させるエアシリンダを設けていたが、これを設けることなく物品の下面とコンベヤとの当接が防止できる。
(もっと読む)
1 - 20 / 21
[ Back to top ]