
Fターム[3E054HA07]の内容
包装位置への供給−物品の供給 (7,769) | 容器詰め (473) | 上から容器詰め (151)
Fターム[3E054HA07]に分類される特許
1 - 20 / 151
物品整列装置
【課題】異なる形状の端部を有する物品を効率よく箱詰めすることを可能にする物品整列装置。
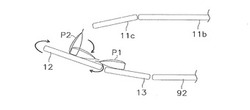
【解決手段】袋P2は、傾斜搬送部11cから停止中の第2の搬送装置12に落下する。袋P2の落下が、落下検知センサによって検知されると、第2の駆動部は制御される(第1の処理)。第2の駆動部は、袋P2が第2の搬送装置12のベルトコンベアに落下した後、第2の搬送装置12を駆動させる。このとき、袋P2は、上端を下流側に倒す。袋P2は、上端が下流側、下端が上流側に位置するように倒れる。これにより、袋P2は、第2の搬送装置12によって第2の平面状態で搬送される。第2の駆動部のモータの回転数が所定値に達すると、袋P2は、第3の搬送装置13に受け渡される。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
整列搬送装置
【課題】振動コンベアでスティック状の物品を整列搬送させることができ、しかも、コンベアの先端でスティック状の物品を積層させることができる新たな整列搬送装置を提供する。
【解決手段】搬送方向に伸びる複数の仕切り壁で形成された複数の搬送路が振動コンベアの搬送面に形成され、各搬送路の始端側に投入される複数のスティック状の物品を各搬送路で搬送してコンベア先端のシャッタ前で横並びに整列させる。また、前記仕切り壁には、複数の搬送路を横断して横たわるスティック状の物品を搬送方向に転向させる立上げ部を設け、その下流の各搬送路に、搬送方向に向かって登り傾斜となる傾斜部を設け、その傾斜部と前記シャッタとの間の段差部で前記物品を積層するようにする。
(もっと読む)
充填装置及びPTP包装機
【課題】容器フィルムに形成されたポケット部に対し細長い形状の錠剤を安定して充填することのできる充填装置及びPTP包装機を提供する。
【解決手段】充填装置は、細長い形状の錠剤2を収容可能な複数の収容凹部23を有したロータリドラム22と、錠剤2を落下させ収容凹部23へ供給する供給シュート35とを備えている。供給シュート35は、錠剤2の長径方向が通路方向を向きかつ当該錠剤2の厚み方向がロータリドラム22の軸線方向を向く縦積み姿勢で、複数の錠剤2が一列に並ぶように構成された通路36と、当該通路36の出口部において、錠剤2がロータリドラム22との接触により厚み方向の向きを維持しつつ前記縦積み姿勢から、その長径方向がロータリドラム22の回転方向と略平行する方向を向く横積み姿勢へ姿勢変化するのを許容する変換凹部37とを備えている。
(もっと読む)
箱詰め装置
【課題】構造を簡素化して製造コストを低減できる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tを列状に並べて整列させる物品整列装置14と、整列させられた複数の物品Tを列の側方に同時に押し出す物品押出し装置16と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を把持する複数のチャック90を有し、複数の物品Tを外装箱Uの内部に押し込む物品押込み装置18と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を複数のチャック90に押出し方向から案内する複数のアッパーガイド110とを備える。
(もっと読む)
物品投入装置
【課題】物品を一定の姿勢で袋体に投入できるとともに、袋体が破損することなく物品を投入できる物品投入装置を提供することにある。
【解決手段】物品投入装置10を、袋体100を位置決めする袋体位置決め手段12と、袋体100の開口部102を開放する開放手段14と、物品110が摺動可能に支持される支持体18と、支持体18を垂直方向に起立させる図示しない回動手段と、物品110が落下しないように規制するストッパー22と、袋体100の開口部102に支持体18を挿入する摺動部材25と、ストッパー22による規制を解除するモータ26と、物品110の上端を下方へ押圧する押し下げ体28と、を備えている。
(もっと読む)
箱詰機における添付書類の供給方法およびその装置
【課題】添付書類を物品と共に確実にカートンに詰め込む。
【解決手段】成形枠44の入口部46に配置された添付書類10は、厚み方向から挟持手段60で挟持されて、入口部46から成形枠44内への上部通口58を通過させることで、挟持手段60より左右に延出する添付書類10の延出基部に折り癖が付与される。成形枠44で曲げ状態で保持された添付書類10は、折り癖の内側が物品14で押されて、物品14と共にカートン12に詰め込まれる。
(もっと読む)
スライス状物の容器収容装置
【課題】スライス状物を効率良く収容することができる容器収容装置を提供する。
【解決手段】収容装置本体4と、スライス状物Sを容器に収容するための第1及び第2回動受け部材12、14とを備え、第1及び第2回動受け部材12、14は、スライス状物Sを受け取る受け角度位置と、スライス状物Sの両端部を内側に曲げる曲げ角度位置との間を回動自在である。第1及び第2回動受け部材12,14は、スライス状物Sを受け取る支持受部16と、支持受部16に一体的に設けられた曲げ保持部18とを備えている。受け角度位置においては、スライス状物Sが第1及び第2回動受け部材12,14の支持受部16と曲げ保持部18との間に挿入され、受け角度位置から曲げ角度位置に回動されると、第1及び第2回動受け部材12,14の曲げ保持部18がスライス状物Sの両端部に下側から作用して支持受部16を中心として内側に曲げて保持する。
(もっと読む)
梱包装置および商品の梱包方法
【課題】初期製品容器内に製品を収納する処理装置の排出部に連結されることが可能な梱包装置を提供する。
【解決手段】梱包装置(10)は、各々がカートン内に製品(A)を梱包することが可能な2つ以上の梱包サブシステムを具備し、梱包サブシステムは梱包される製品(11)の共通の出所を共有し、少なくとも1つの移送機構(22)が、前記共通の出所から2つ以上の前記梱包サブシステムのいずれかに製品(A)を移送するために設けられている。
(もっと読む)
丁合い封書作製装置
【課題】封書を簡単に製造できる丁合い封書作製装置を提供する。
【解決手段】縦方向搬送部30は、下表紙3の左側縁部3Lに、接着材3aを縦方向Yに沿って塗布する下表紙−封入物接着材塗布部34と、接着材3aによって、下表紙3及び封入物4を接着して積層体5を作製する下表紙−封入物積層部35と、積層体5の下表紙3の右側縁部3Rに、接着材3bを縦方向Yに沿って塗布する第1下表紙−上表紙接着材塗布部37と、積層体5の封入物4の左側縁部4Lに、接着材4bを縦方向Yに沿って塗布する封入物−上表紙接着材塗布部38とを備え、左右方向搬送部40は、積層体5の下表紙3の縦方向Yの上下縁部3D,3Uに、接着材3cを左右方向Xに沿って塗布する第2下表紙−上表紙接着材塗布部43と、接着材3a,4b,3c,3dによって、上表紙2及び積層体5を接着して封書1を作製する積層体−上表紙積層部44とを備える。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
卵包装装置および卵包装方法
【課題】単純な機構でありながら高速に鶏卵の包装処理を可能とする卵包装装置を提供する。
【解決手段】複数列で卵を搬送する複列搬送部と、前記複列搬送部で搬送される卵を収容するための、複数列の卵座を有する容器を搬送する容器搬送部とを備える卵包装装置であって、前記容器搬送部は、前記容器の搬送方向が前記複列搬送部の卵搬送方向に対し傾斜し、かつ当該容器搬送位置が当該複列搬送部の卵搬送位置より下方にあり、前記複列搬送部は、前記複列搬送部の第1列目で搬送される卵を、前記容器の第1列目の卵座に転載させる第1転載部と、第(n−1)転載部より搬送方向下流側に配置され、当該複列搬送部の第n列目で搬送される卵を、前記容器の第n列の卵座に転載させる第n転載部とを有する。
(もっと読む)
箱詰め装置
【課題】製造コストやメンテナンスコストを低く抑えながら複数の物品を整列させることができるとともに、物品の姿勢の乱れを防止することができる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、第1物品T1及び第2物品T2をこの順で同一方向に連続的に搬送する物品搬送装置22と、第1物品T1を受け止めることによって、第1物品T1及び第2物品T2を所定の第1停止領域Q1及び第2停止領域Q2で次々と停止させる第1ストッパ部24aと、第1停止領域Q1より上方に第1物品T1に近接するように配置される第1押え部26aと、第2停止領域Q2より上方に第2物品T2に近接するように配置される第2押え部26bと、第1物品T1及び第2物品T2を第1停止領域Q1及び第2停止領域Q2から押し出す物品押出し装置58とを備える。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
果実の容器詰め装置
【課題】出荷パック内に見栄え良くイチゴを整列する。
【解決手段】制御部は、マシンビジョン62が取得した収穫箱70に収容されたイチゴの画像に基づいてイチゴの吸着位置を検出し、イチゴ搬送装置10に、収穫箱70に収容されたイチゴを吸着保持させるとともに、中継コンベア40上にイチゴを一旦載置させる処理と、マシンビジョンが取得した中継コンベアに載置されたイチゴの画像に基づいてイチゴの向き及び吸着位置を検出し、イチゴ搬送装置に、中継コンベアに載置されたイチゴを吸着位置にて吸着保持させるとともに、イチゴの向きに基づいて出荷パック52A〜52Dにイチゴを搬送させる処理とを実行させる。
(もっと読む)
商品集積装置
【課題】ツバ部付きの容器を集積する際に、隣接するツバ部が重なりを生ずることのない商品集積装置の提供
【解決手段】搬送手段7により供給される上端周縁部にツバ部を有するカップ状商品Zを集積させるための商品集積装置であって、搬送手段7の搬送路終端側71において、搬送手段7による搬送方向と交差する方向に移動可能に設けられる整列ガイド31と、搬送手段7の搬送路終端側71であって、整列ガイド31移動方向側に配置される修正ガイド4と、を備えており、整列ガイド31は、搬送手段7により供給されてくるカップ状商品Zの胴部をガイドしつつ所定の個数ずつ収容するためのガイド溝35を備え、修正ガイド4は、整列ガイド31の移動に伴って移動するガイド溝35に沿って並ぶ複数のカップ状商品間を通過することにより各カップ状商品Zを押圧して位置修正を行う複数の位置修正部材42を備える商品集積装置。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】送込みコンベヤ装置13の重量計33により投入口21より投入される物品16の重量を計測し、規定重量以下であった場合、物品16が投入される前に、ベルト体27が、ベルト体27の周回方向に所定長さだけ予め移動され、ベルト送り装置28に残す部分が少なくされる。これにより、物品16を移載するとき、ベルト送り装置28から送り出されるベルト体27の長さが短くなり、ベルト送り装置28は、通常より早く、ベルト体27の送り出しを終了する。よって、物品16は通常より早くベルト体27から落下し、このとき、ベルト体27上を物品16が滑ることがなく、略中央から物品16は落下し、箱体17からこぼれ落ちることを回避できる。
(もっと読む)
選果システム
【課題】表面が柔らかい青果物でも容易に箱詰めできる選果システムを提供する。
【解決手段】青果物6を載置した載置台5を上流側から下流側に搬送する主搬送手段が備えられ、主搬送手段には上流側から青果物6を載置台5上に載せる載置工程と、前記青果物6の品質を測定する品質計測工程と、前記品質計測工程の測定結果から等級や階級別に青果物6を選別してパック詰めするパック詰め工程とが設けられる選果システムにおいて、パック詰め工程は、主搬送手段の下流部で等級や階級別に分岐して搬送する複数の選別ライン30が設けられ、各選別ライン30の側方には、載置台5上に載置された青果物6のがく片側を吸着してパック48まで搬送し、整列させて吸着を解除してパック48内に詰めるパック詰めロボット33を備えるものとする。
(もっと読む)
包装装置
【課題】粒状物が2本の原反間の所期の位置に挟み込まれるようにして包装することができるようにした包装装置を提供する。
【解決手段】粒状物を挟み込むための凹部11aが少なくとも一方のローラ11,12の外周面に設けられ、重なり合いつつある2本の原反1,2間に粒状物を案内するシュートパイプ20が一対のローラ11,12の上流側に配備されている。ローラ11,12に設けられた凹部11aを目掛けてシュートパイプ20から粒状物を噴出させる。粒状物を1個ずつ入れる窪み部61,61,…を外周面に複数設けた排出側の回転ドラム(第2のドラム)60がシュートパイプ20の上流端に配備されている。窪み部61,61,…に空気を噴射することにより、粒状物が窪み部61,61,…内からシュートパイプ20内に一定の間隔を空けて噴出する噴射手段64が備えられている。
(もっと読む)
1 - 20 / 151
[ Back to top ]