
Fターム[3F027EA01]の内容
Fターム[3F027EA01]に分類される特許
121 - 140 / 309
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
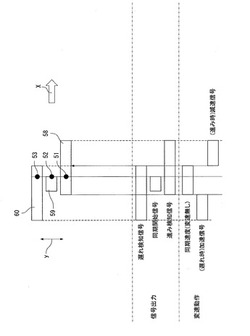
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
仕分け設備

【課題】本発明は、起動直後より仕分け作業を開始でき、またトラッキングのずれを解消し高速仕分けに対応できる仕分け設備を提供することを目的とする。
【解決手段】搬入コンベヤ装置82による物品Dの搬送の速度と無端チェーン40による物品支持体50の移動の速度は同速度とされ、第1光電センサ84により搬入コンベヤ82上に物品Dを検出している間、第2光電センサ86等からなる欠損検出器により物品横押し体57の欠損が確認されると、物品横押し体57の作用は中止され、終端まで移動される構成とする。この構成によれば、欠損が確認された物品横押し体57の固有の番号を記憶する必要がないことにより起動直後に仕分け作業を開始でき、また物品横押し体57の欠損が検出されても、物品Dの搬送と物品支持体50の移動はそのまま続行されることにより、トラッキングずれの発生を回避でき、簡易な仕分け制御および高速仕分けを実現できる。
(もっと読む)
物品の流れを取り扱う装置及び方法
所定の進行速度vinで搬入される(例えば、使い捨て吸収パッドのような製品A)物品の流れから始まって、物品Aの搬出の流れを形成する装置10であって、装置は、長手方向に搬入される物品Aの流れを受け入れるスクリューコンベア14を含む。スクリューコンベアは、少なくとも1つのスクリュー142を含み、当該スクリューの螺旋は、進行する物品Aと作用して、スクリュー142による物品Aの搬送を決定する。最初の進行速度に対して物品Aの搬送速度を変化させるように、スクリュー142の回転速度が調整される。特に、スクリュー142による物品Aの搬送速度(vapp)が、最初の進行速度(vin)の約数となるように調整され、物品Aの搬出の流れには、積み重ねられた物品のグループが含まれる。各グループは、初期進行速度(vin)とスクリュー142の搬送速度(vapp)との間の比に等しい数の物品Aを含む。 (もっと読む)
位置検出装置と位置検出方法
【課題】 ガイドシャフトでガイドされた可動部を有する可動装置に設けられ、可動部が基準位置に存在するのか否かを検出する位置検出装置を提供する。
【解決方法】 エアセンサ30(位置検出装置)は、コマ18とブッシュ40とエア流路28と圧力計26を備えている。コマ18は、ガイドシャフト12に略同軸に設けられ、ガイドシャフト12よりも大径である大径部18aを有し、ガイドシャフト12に対して揺動可能に支持されている。ブッシュ40は、貫通孔42が形成され、可動部10が基準位置に達したときにコマ18の大径部18aが貫通孔42に入る位置に固定されている。エア流路28は、外部から供給されるエア(流体)を貫通孔42内に供給している。圧力計26は、エアの圧力を監視している。リフタ装置2では、エアセンサ30を用いて可動部10の位置を精度よく検出することができる。
(もっと読む)
搬送装置
【課題】搬送対象物の重量に応じて適正な動作モードで動作することができる搬送装置を提供する。
【解決手段】 制御装置30は、予め定めた複数の重量範囲に対応して複数の動作モードを動作モード記憶部37に記憶している。そして前述の重量測定部22が測定した成形品とアタッチメントヘッドの合計重量が、複数の重量範囲のいずれに属するのかを判定部35で判定する。判定部35の判定結果に応じて、モード選択部36が、複数の動作モードから適正な動作モードを選択する。制御実行部38は、モード選択部36が選択した適正な動作モードに従って制御を実行する。
(もっと読む)
オーバーヘッド型搬送装置
【課題】 暴走するキャリッジを短距離において停止させることができ、その際の速度検出の精度を向上させた機械的停止機能を備えた搬送装置を提供する。
【解決手段】 軌道レール1内を通過するキャリッジ2の車輪23に接触する接触部材5と、接触部材を先端に装着してなる揺動部材4と、揺動部材の一部の当接を受けてリンクするリンク部材6と、キャリッジの進行を阻害する方向に向かって進退可能に設けられたストッパ部材9と、ストッパ部材の表面に突設してなる被掛止部95と、ストッパ部材の被掛止部を掛止およびその解除を可能にしてなる掛止部材8と、掛止部材とリンク部材とを連結する連結部材7とを備えている。揺動部材が大きく揺動してリンク部材がリンクするとき、リンク部材が連結部材を介して掛止部材を回動させ、被掛止部の掛止を解除させてストッパ部材を作動させる。
(もっと読む)
搬送用制振制御システムのフィ−ドバックコントロ−ラ
【課題】搬送時に搬送物に生じる振動を防止し、かつ制御系の設計及びコントロ−ラの導出も平易な搬送用制振制御システムのフィ−ドバックコントロ−ラを提供する。
【解決手段】 フィ−ドバックコントロ−ラの形を、少なくともノッチフィルタ若しくはロ−パスフィルタを有する周波数制御要素と位置制御要素の組み合わせに限定し、そのフィ−ドバックコントロ−ラの要素の値を最適に与えるために、設計仕様を周波数仕様と時間仕様の両方で与える。
(もっと読む)
非接触式給電システムを用いたトロリーシステム
【課題】非接触式の給電システムを用いた場合に、トロリーシステムの簡素化や組立性を向上できる非接触式給電システムを用いたトロリーシステムの提供を図る。
【解決手段】給電線6をレール2に支持する給電線ハンガー9を有し、レール2と給電線ハンガー9とに設けられた着脱機構により当該給電線ハンガー9を着脱自在とすることで実現する。
(もっと読む)
搬送装置
【課題】長尺状シートの異常な送り出しを防止し、長尺状シートを良好に搬出することのできる搬送装置を提供する。
【解決手段】長尺状シートGを該長尺状シートGの長手方向に搬送する第一搬送手段21と、該第一搬送手段21から送り出された長尺状シートGを第一搬送手段21の搬送方向に沿って斜めに交差する方向へ搬送する第二搬送手段22と、これら第一搬送手段21及び第二搬送手段22の運転停止を制御する制御部4とを有し、該制御部4は、第一搬送手段21から送り出された長尺状シートGの先端が第二搬送手段22に接触する以前のタイミングで第二搬送手段22の運転を第一搬送手段21の送り速度のうち第二搬送手段22の搬送方向成分以上の速度で開始するように制御することを特徴とする。
(もっと読む)
モータ内蔵ローラの制御装置、モータ内蔵ローラ及びコンベア装置
【課題】モータ内蔵ローラの駆動モータや制御基板等の焼損を防止すると共に、過大な電流が流れる時間を極力短縮して消費電力を抑制することができるモータ内蔵ローラの制御装置を提供することを目的する。
【解決手段】モータ制御部42には、駆動モータ31に供給される電流の電流値が入力されており、この電流値が一定の値を越えないように制限している。モータ駆動部25に流される電流の電流値が、「所定の上限値」以上となる状態が一定時間以上続いた場合に、「所定の上限値」を段階的に下げる。「所定の上限値」を低下させた状況下において、モータ駆動部25に流される電流の実測値が、「所定の上限値」よりも下の一定値以下となった場合に「所定の上限値」を元の値に戻す。
(もっと読む)
基板搬送装置および基板処理装置
【課題】装置寸法を長くすることなく、効率的に基板の搬送速度を途中で変更できる搬送技術を提供する。
【解決手段】直列配置された2つの搬送機構の境界を越えて基板を搬送するにあたり、基板がこの境界上を移動して受渡されている受渡期間(時間T15〜時間T16)を含んだ時間帯(時間T11〜時間T12)で、2つの搬送機構の搬送速度を整合させつつ減速させる同期制御を行う。この減速過程における時間−速度の関係をS字曲線とすることにより、基板に加わる加速度の急激な変化を防止できる。また、受渡期間を減速期間として利用することにより、それ以前に減速を完了させたり、基板の受渡し後に減速を開始させたりする場合と比較して搬送が効率的となる。
(もっと読む)
石炭の分配搬送制御方法
【課題】石炭を複数の炭槽に向けて分配搬送する場合に、装入先を連続的に切り替えると共に、装入先の炭槽毎に石炭の品位制御を行うことができる石炭の分配搬送制御方法を提供する。
【解決手段】所定の配合比率で配合された石炭を、分配設備10を用いて2つのコンベア3a,3bに分配して供給し、一時貯留用の複数の炭槽8に向けて搬送するに際して、2つのコンベア3a,3bのうち、一方のコンベアにおける向け先炭槽の空き量と、他方のコンベアにおける向け先炭槽の空き量との比率に応じて、分配設備11での石炭の分配比を算出して分配すると共に、湿炭ホッパ4から炭槽8前のコンベアまでの石炭滞留量を含めたタイミングで、前記配合比率の変更及びコンベア系統の切替を行う。
(もっと読む)
ローラコンベヤ用ユニットおよびこれを用いたローラコンベヤ
【課題】ローラコンベヤ用ユニットをローラコンベヤから着脱容易にすると共に、それぞれのローラコンベヤ用ユニットにおける回転応答性を向上させることで、メンテナンス性に優れ、搬送速度の制御性を向上させたローラコンベヤを提供する。
【解決手段】 搬送物200を搬送する搬送面を構成する単数または複数のローラ体12と、ローラ体12を個別に回転駆動させる駆動手段であるモータ14と、ローラ体12およびモータ14をそれぞれ保持する保持フレーム16と、搬送面上に搬送物200が載置されていることを検出する搬送物検出手段18と、搬送物検出手段18の検出結果に基づいてモータ14への動力供給を制御する制御部30と、を有していることを特徴とする。
(もっと読む)
物品の方向転換装置及び方向転換方法
【課題】物品の姿勢を搬送途中で方向転換させる場合において、その方向転換させた物品の姿勢が所望の姿勢に対してずれを生じるようなときには、そのような姿勢のずれが後続の物品において生じないように自動的に修正することができる物品の方向転換装置及び方向転換方法を提供する。
【解決手段】箱Bが跨って載ることができるように並列に配置された左右両搬送コンベア28a,28bの速度を箱Bの搬送方向に対する姿勢を回転させて方向転換させ得る速度差がつくように設定し、その箱Bの搬送方向に対する姿勢を搬送経路の途中の検出位置で検出し、その検出結果に基づき、箱Bの姿勢が所望の姿勢でない場合は、検出位置で姿勢を検出された物品及びその物品に後続して搬送される物品のうち少なくとも一方の物品の姿勢が方向転換終了時点において所望の姿勢に適合するように、予め設定されている各搬送コンベア28a,28bの速度設定内容を補正する。
(もっと読む)
ベルトコンベヤ内のアイドラの状態を監視するための装置及び方法
ベルトコンベヤ内のアイドラ状態を監視するための方法及びシステムを提供する。センサ(110〜114)はコンベヤベルト(102)と機械的に結合されて、コンベヤベルトの支持構造(108a〜108h、202、210、212、214a〜214b)の特性を感知する。センサは対応信号を監視システム(120)に無線送信する。監視システムは、送信信号に基づいて支持構造の状態を決定する。支持構造は複数の支持構造の1つであり、それぞれの支持構造の特性が感知され、支持構造に対する識別子と関連付けされて、監視システムに送信される。支持構造は複数のエレメントを含み、各エレメントの特性が対応する複数のセンサの1つによって感知且つ送信される。  (もっと読む)
(もっと読む)
物品処理装置
【解決手段】 充填装置1はそれぞれスターホイール等の回転体を備えた供給コンベヤ2、インフィードスクリュー3、リンサ用供給スターホイール4、リンサ5、リンサ用排出スターホイール6、中間スターホイール7、フィラ用供給スターホイール8、フィラ9、フィラ・キャッパ用受け渡しスターホイール10、キャッパ11、キャッパ用排出スターホイール12、排出コンベヤ13から構成されている。
例えばフィラ9に異常が発生すると、制御手段14は第3ブレーキB3を作動させて上記フィラ9のスターホイールを強制的に停止させ、同時に、第1、第2、第4、第5サーボモータM1,M2,M4,M5を制御して、異常の発生していない設備のスターホイール等を上記フィラのスターホイールの停止時間で停止させる。
【効果】 所要の設備で異常が発生しても、各設備をほぼ同時に停止させて各設備の損傷等を防止することができる。
(もっと読む)
検出器取付装置
【課題】検出器の位置を容易に変更可能な検出器取付装置を提供する。
【解決手段】ベルトコンベヤ50の状態を検出する検出器を取付ける検出器取付装置6において、ベルトコンベヤ50が設置された現場の床51に取付けられる固定台2と、検出器4が取付けられて固定台2に取付けられた可動台3とを備えたことを特徴とする。特に、固定台2が可動台3の移動をガイドするガイド面25を備え、ガイド面25が、コンベヤベルト52を横切る方向にのみ移動可能なように可動台3をガイドし、コンベヤベルト52を横切る方向以外への可動台3の移動を規制したことを特徴とする。
(もっと読む)
パイプコンベヤ
【課題】重合部の両側端部の入れ替わりを確実に検知することができるパイプコンベヤを提供する。
【解決手段】パイプ状に丸められたときに互いに重合する搬送ベルト3の重合部Aにおける一方のベルト側端部3aに、N極が搬送ベルト3の外側を向くようにした永久磁石6を設け、かつ重合部Aにおける他方のベルト側端部3bに、S極が搬送ベルト3の外側を向くようにした永久磁石7を、一方のベルト側端部3aに設けた永久磁石6から搬送ベルト3の長手方向に離間させて設け、搬送ベルト3が通過する箇所における固定体に、両永久磁石6,7が通過するときの搬送ベルト3の外側に現れる永久磁石6,7の極性を検出する極性検出手段を設ける。
(もっと読む)
X線検査装置
【課題】X線画像のぶれを防止し、物品の不良を精度良く検査することが目的とされる。
【解決手段】X線検査装置1は、搬送される物品の検査をX線画像Iに基づいて行う装置であって、検出部171と、制御部172とを備える。検出部171は、X線画像Iから物品の搬送速度に関するデータDを検出する。制御部172は、検出部171で検出されたデータDに基づいて搬送速度を制御する。具体的には、検出部171は、データDとしてX線画像Iでの物品の長さLを検出する。制御部172は、検出部171で検出された長さLを、物品の長さの実測値L0に漸近させる。
(もっと読む)
搬送物の位置検出装置
【課題】搬送物の形状がランダムであっても、搬送物の特定の位置を複数の箇所で高い位置検出精度で検出することができる搬送物の位置検出装置を提供する。
【解決手段】搬送物1を載せて搬送する搬送コンベア7に取付けられ、搬送物と同期して移動する同期部材12と、同期部材に一体的に設けられた位置検出用マーカ14と、位置検出用マーカの特定の位置を検出する位置検出センサ16とを備える。搬送コンベア7は例えばベルトコンベアであり、同期部材12は搬送物1を載せてベルトコンベアを移動するトレー15であり、位置検出用マーカ14は、トレーの表面に平面的又は立体的に設けられている。
(もっと読む)
121 - 140 / 309
[ Back to top ]