
Fターム[3F027EA01]の内容
Fターム[3F027EA01]に分類される特許
161 - 180 / 309
物品検査装置
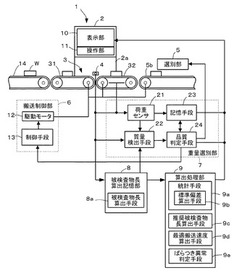
【課題】設定されている被検査物の長さに対する検査された被検査物の長さの対比から適切な検査精度や検査効率になるように対応をとることが可能な物品検査装置を提供すること。
【解決手段】被検査物を搬送する搬送手段と、前記被検査物の搬送方向における先部および後部を検出する搬入センサ4と、前記搬入センサ4によって検出された前記被検査物Wの品質データを取得し、前記品質データに基づいて前記被検査物の良否を判定する品質判定手段と、を備えた物品検査装置において、前記搬入センサ4により前記被検査物の搬送方向における先部が検出されてから後部が検出されるまでの検出時間に基づいて、前記搬送方向における前記被検査物Wの長さを表す被検査物長Lを算出する被検査物長算出手段8aと、前記被検査物長算出手段8aにより算出された前記被検査物長Lに関する統計量を算出する統計手段9aと、を備えた。
(もっと読む)
熱処理設備のコンベヤ蛇行補正制御方法

【課題】炉内コンベヤの搬送帯の蛇行を適確に補正できるようにする。
【解決手段】支持ローラ10上に無端帯状の搬送帯6が支持された炉内コンベヤにおいて、該搬送帯の左右への片寄りを検出する検出装置11a,11bを設け、該支持ローラを進行方向に対して左右に傾斜させるアクチュエータ16,17を設け、前記検出装置により搬送帯6の片寄りが検知されたら該アクチュエータにより支持ローラ10をその片寄りと反対方向に向くように傾斜させると共に、その所定時間後に該支持ローラ10の傾斜角度を小さくするようにした。
(もっと読む)
部品検出方法、部品検出装置、及び、ICハンドラ
【課題】電子部品のポケットへの載置状態を少数のセンサで検出できる部品検出方法、部品検出装置、及び、ICハンドラを提供する。
【解決手段】ICハンドラの各シャトルの供給側チェンジキット31の上面には、ICチップTを載置するポケット32と、該ポケット32をY方向に横切る2つのスリット37a,37bとが凹設されている。また、ベースの上面には、シャトルを間に挟んで相対向して投光部と受光部が備えられ、投光部から所定の断面形状の検出光43が受光部に照射される。受光部は、スリット37a,37bを通過させてICチップTの上面によって一部が遮られた検出光43に基づいて受光量を検出する。ICハンドラはポケット32にICチップTが正常に載置されているときの受光量から第1の閾値を予め求め、搬送するICチップTが一部を遮った際の受光量と、第1の閾値とを比較してICチップTの載置状態を判断する。
(もっと読む)
自動荷役車両およびその制御方法
【課題】安価な構成で、荷役対象物の停止位置を調整することが可能な自動荷役車両およびその制御方法を提供する。
【解決手段】CPUは、最初に搬送モータを駆動する。次に、CPUは、光電センサから与えられる検出信号に基づいて、荷役対象物の通過時間tを計測する。次いで、CPUは、荷役対象物の長さXを算出する。すなわち、CPUは、上記の通過時間tと搬送速度Vとの積により、荷役対象物の長さXを算出する。次に、CPUは、(Y−X)/2Vにより停止時間Tを算出する。なお、Yは車両本体部の本体部長さである。上記の停止時間Tとは、荷役対象物の一端部が光電センサを通過したときから、複数のローラーを停止させるまでの時間である。次いで、CPUは、停止時間Tが経過した後に搬送モータを停止させる。
(もっと読む)
粉粒体の定量供給システム
【課題】過去の運転結果に基づいて、外乱発生有無によらず、精度の高い安定した定量供給を行うことができる粉粒体の定量供給システムの提供。
【解決手段】過去の運転によって得られた荷重毎の操作量と排出流量の関係に基づいて、フィーダ1のモデルを作成するモデル作成部14と、モデル作成部14で作成されたモデルと、予め設定された最終目標流量と目標流量収束時間とに基づいて作成された参照軌道とにより、モデルから出力される排出流量が、参照軌道を実現するように、操作量を予測する操作量予測演算部15と、流量検出部11から検出された排出流量と、排出流量が検出された時間における参照軌道上の流量値との偏差が略ゼロとなるように、操作量予測演算部15で予測された操作量の補正を行う操作量補正部17とを備える。
(もっと読む)
コンベヤベルトのローラ乗り越え抵抗力測定装置
【課題】コンベヤの設置現場での測定が可能であるとともに、複数方向に対する測定データを得ることのできるコンベヤベルトのローラ乗り越え抵抗力測定装置を提供する。
【解決手段】測定用ローラ11の支軸11bの両端と支持部材12の各支持壁12aとの間に設けた検出器13により、測定用ローラ11上を移動するコンベヤベルトAから測定用ローラ11に加わる力を検出するようにしたので、測定用ローラ11の支軸11bを介して検出した力をローラ乗り越え抵抗力として測定することができる。これにより、支持部材12に取付けられた測定用ローラ11を現場のベルトコンベヤに容易に設置することができる。また、等速自在継手11cを介して連結された各測定用ローラ11が互いに一体に回転することから、検出器13を各測定用ローラ11ごとに設ける必要がなく、装置全体がコンベヤベルトの幅方向に大型化することがない。
(もっと読む)
閉塞検知機能付き搬送装置
【課題】搬送管が閉塞していることを検知できる閉塞検知機能付き搬送装置を提供すること。
【解決手段】斜面2の上方部から下方部へコンクリート3を搬送し、斜面2の下方部の施工現場に供給するコンクリート3の搬送装置であって、コンクリート3の搬送管12内のコンクリート3の重量が与える負荷を計測するセンサと閉塞判断手段を備えている。これにより、センサから読み取った情報と、実験値から予想される閉塞閾値を比較して、閾値を超えているか否かによって、搬送管12の閉塞を推定し、出力部18から閉塞を警告する。また、監視端末17からの指令によって、電動機駆動用制御盤15を介して運転制御を行う。
(もっと読む)
搬送テーブル駆動用電動機のトルク制御装置
【課題】重量素材搬送時の斜めずれを矯正する機能を有する搬送テーブル構成設備を、長寿命とすること。
【解決手段】スケジュール管理用計算機32から入力される搬送素材名k1とその重量値w1を用い、その搬送素材名k1のスラブを搬送テーブルで搬送する際に、電動機20が起動時に必要なトルクαTを算出する必要トルク算出部30aと、その算出された必要トルクαTを起動トルクとして発生する際に電動機20に流れる電流値を算出し、これを電流制限値iLとする電流制限値算出部30bとを備えてトルク制御装置30を構成する。このトルク制御装置30で、スラブの搬送及び矯正時の電動機20の電流値が電流制限値iLを超えないように制御する。
(もっと読む)
搬送装置
【課題】本発明は、加工ラインの変更に容易に対応が可能且つ、粉塵等の影響を受けることがない上に直線的な通信に限定されない通信手段を有し、更に外部装置によるシステム管理並びに制御を安価な構成によって可能とした搬送装置を提供することを目的とする。
【解決手段】本発明は、前記した課題を解決する手段として、固定部と固定部に配設された走行レールと、モータとコントロールボックスを搭載し、電力供給をトロリ−ユニットにて行う走行部と、走行部に取り付けられたローディング装置部と、他の装置との同調した動作を行う為の制御盤より構成し、走行部に搭載したコントロールボックスと制御盤との通信に電力線通信を用いた装置構成とし、更に制御盤と外部装置間においても電力線通信が可能な装置構成とする。
(もっと読む)
パッケージ搬送システム
【課題】停止位置検知センサの上流側に新たなセンサを設け、当該センサから信号を受けたコンベア駆動制御部が当該信号により搬送コンベアの搬送速度を変速することで、パッケージ回収の作業効率を良くする。
【解決手段】糸巻取りユニットから排出されるパッケージを所定停止位置まで搬送するパッケージ搬送システムであって、パッケージを搬送する搬送コンベアと、搬送コンベアの搬送経路上の減速開始位置から停止位置までの範囲でパッケージの存在を検知する範囲検知センサと、搬送コンベアの駆動を制御するコンベア駆動制御部とを具備し、範囲検知センサがパッケージを検知しない場合はコンベア駆動制御部が搬送コンベアの搬送速度を通常搬送時の速度より加速するように制御し、加速制御を行った後範囲検知センサがパッケージを検知した場合はコンベア駆動制御部が加速した搬送速度を通常搬送時の速度まで減速するように制御する。
(もっと読む)
昇降式の物品搬送装置
【課題】搬送効率が高いものでありながら、物品の移載を適切に行うことができる昇降式の物品搬送装置を提供すること。
【解決手段】制御手段(H)が、物品移載用の適正移載高さに対応する移載装置の目標昇降位置情報を記憶するように構成されて、昇降位置検出手段(17)の検出情報及び記憶した目標昇降位置情報に基づいて、移載装置を適正移載高さに昇降させるべく、昇降駆動手段(13)の作動を制御する昇降制御処理、並びに、移載装置を適正移載高さに昇降させた後に、ビーム検出手段(BS)の検出情報に基づいて、移載装置が適正移載高さに対応して定めた許容昇降範囲内に位置するか否かを判別する停止位置確認処理を実行するように構成されている昇降式の物品搬送装置。
(もっと読む)
パイプコンベヤベルトの変形状態検出装置
【課題】パイプコンベヤベルトの丸められた部分の捩れ状態と潰れの度合とを容易にかつ精度よく検出することのできるパイプコンベヤベルトの変形状態検出装置を提供する。
【解決手段】パイプコンベヤベルト10の裏面の一方の端部にとベルト幅方向中央部に、ゴム磁石から成る耳位置信号発生手段2と底部信号発生手段3とを配置し、これらの信号発生手段2,3の間にもゴム磁石から成る中間部信号発生手段4A〜4Dを配置するとともに、パイプ状に丸められたコンベヤベルト10の外周部に、上記各信号発生手段2,3,4A〜4Dからの信号を受信する複数の受信手段510〜521を配列し、上記受信手段510〜521で受信した上記信号発生手段2,3,4A〜4Dからの信号に基づいて、上記パイプコンベヤベルト10の変形状態を検出するようにした。
(もっと読む)
コンベヤベルトのモニタリング装置
【課題】付勢手段の固有振動や減衰振動による影響を最小限に押え、センサの精度を高めることができるようにする。
【解決手段】一端が固定体13に連結され、かつ他端がコンベヤベルト3に向って延出し、延出方向に伸縮しうる付勢手段14と、この付勢手段14の他端部に連結された支持体12と、支持体12のコンベヤベルトとの対向面にコンベヤベルトに圧接して回転するローラ11とを備え、支持体12またはローラ11の少なくとも一方に、センサ手段5を配設し、さらに、支持体12と固定体13との間に、付勢手段14の反復振動を減衰するダンパ16を設ける。
(もっと読む)
ワーク搬送状態検出構造、ワーク搬送装置およびワーク搬送状態検出方法
【課題】多くのセンサといった過大なコストがかかる構成を必要としない簡単な構成でありながら、ワークが予め定められた姿勢でない場合などワーク搬送不良の場合であっても、搬送異常を確実に検出でき、ワークを破損してしまうことなく、確実なワークの搬送ができるようにする。
【解決手段】定位置検出センサ4はまさにワーク1が搬送完了点3に到達した地点でONする。また、範囲検出センサ5のような性質をもつセンサを追加することで、ワーク1が反ったり変形していても、確実にワーク1が搬送完了点3周辺にあることを検知することができるようになっている。このため、範囲検出センサ5がONした後に間もなくONするはずの定位置検出センサ4が、予め定められた時間内にONしなかった場合、装置の動作を停止させる制御ができ、ワーク詰まりを防止することができる。
(もっと読む)
卵の処理装置
【課題】 何らかのトラブルが発生した場合でも装置全体を停止させることなく効率的な処理を行なうことができ、また、例えば、下流側の処理工程で段取り変更を行なう必要が生じた場合でも、操業を継続しながら段取り変更も実施することのできる卵の処理装置を提供する。
【解決手段】 制御手段40は、一部の分配コンベアへ卵Eを移載させず、卵Eを移載させるべき残りの他の分配コンベアが複数の場合、搬送されてくる各バケットBを無端搬送コンベア20の搬送方向最上流側の移載手段から順に下流側の移載手段に割り付け、最下流側の移載手段に割り付けられたバケットBの直後のバケットBを、再び最上流側の移載手段に割り付ける。
(もっと読む)
搬送モジュール、並びに、搬送装置
【課題】装置構成がコンパクトで、物品の搬送方向を迅速かつ任意の方向に変更可能な搬送モジュール、並びに、当該搬送モジュールを備えた搬送装置の提供を目的とする。
【解決手段】搬送装置1は、搬送モジュール50を主搬送経路2の中途に設けた構成とされている。搬送モジュール50は、複数の搬送セル60を2次元に配した構成とされており、そのそれぞれにモータ内蔵ローラ80が設けられている。各モータ内蔵ローラ80は、旋回軸を中心として旋回可能とされている。各搬送セル60のモータ内蔵ローラ80は、物品の搬送経路にあわせて旋回する。
(もっと読む)
過大物検出装置およびそれを備えた搬送装置
【課題】搬送装置が過負荷により停止する前に過大物が供給されたことを検出できる検出装置を提供する。
【解決手段】過大物検出装置30は、ケーシング5内に配置された検出羽根33と、検出羽根33がケーシング5に対して回転可能なように支持するシャフト34と、シャフト34をケーシング5に対して回転可能に支持する1対の軸受35と、シャフト34の回転を検出するリミットスイッチ37と、を備えている。
(もっと読む)
搬送装置の制御装置、それを備えた搬送装置および搬送装置の制御方法
【課題】搬送装置の破損を防止しつつ施設の生産性の向上を図る。
【解決手段】コンベヤ1の制御装置10は、監視ユニット20と、シーケンサ30により実現される駆動切換部31と、を備えている。監視ユニット20は、駆動モータM1の負荷状態を検出するとともに、検出された負荷状態に基づいて駆動モータM1の負荷状態を判定する。駆動切換部31は、監視ユニット20の判定結果に応じて、正側動作および逆側動作の切り換えを駆動モータM1に行わせる。
(もっと読む)
ベルト搬送装置
【課題】エンドレスベルトの停止位置を正確に測定できるベルト搬送装置を提供する。
【解決手段】駆動プーリ10によって所定方向に所定量送られて停止するエンドレスベルト14と、搬送物が載置されることのない領域に穿設された所定形状の透孔と、エンドレスベルト14の送りが停止したとき、エンドレスベルト14の引張側14aとなる所定位置に位置する前記透孔を挟むように設置され、投光部18aと、受光部18bとから成るセンサ18と、受光部18bでの今回の受光量と前回受光した受光量との偏差値を、エンドレスベルト14の今回送り量に加味して次回送り量を設定し、エンドレスベルト14の送り量を次回送り量となるように、駆動プーリ10を制御する制御部22とを具備することを特徴とする。
(もっと読む)
ワーク搬送装置
【課題】各工程における作業者による作業環境に合わせて、必要に応じてコンベアを移動させて、組付ラインの長さや配置などを容易に調整することができるワーク搬送装置を提供する。
【解決手段】複数の異なる姿勢でワークを支持するワーク支持台2と、複数のワーク支持台2を搬送方向Xに並べた状態で搬送するコンベア3とを備えるワーク搬送装置1であり、前記コンベア3は、搬送のための動力を供給する駆動モータ23を有する複数の駆動コンベアユニット4と、この駆動コンベアユニット4の間に間欠的に配置されてワーク支持台2を搬送方向Xに移動自在とするフリーコンベアユニット5とを組み合わせたものである。
(もっと読む)
161 - 180 / 309
[ Back to top ]