
Fターム[3F072AA12]の内容
Fターム[3F072AA12]に分類される特許
1 - 20 / 33
ターンテーブル装置および搬送設備
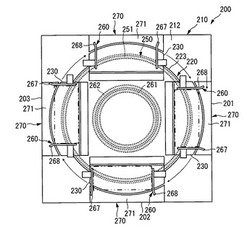
【課題】搬送する物品の大きさの変更に対応する。
【解決手段】第1ターンテーブル装置200は、食パンXA1を受け入れる入口201と、食パンXA1を送り出す第1出口202および第2出口203と、鉛直な回転軸回りに回転自在に設けられ、入口201で受け入れた食パンXA1を載せて第1出口202または第2出口203まで搬送するテーブル230と、このテーブルに載せて搬送中の食パンXA1の側面を案内するサイドガイド267,268を備える。サイドガイド268は、回転軸の同心円の接線方向に移動可能な構成であり、テーブル230に載せた食パンXA1を側方へ押して上流のラインにおける食パンXA1の搬送基準とは異なる基準で下流のラインへ送り出すことを可能にする。
(もっと読む)
パン型造粒機用の大塊処理装置

【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
物品搬送装置
【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
物品処理装置
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
移載装置
【課題】移載ベルトの一部を移載装置本体側に簡単に固定することができる移載装置を提供すること。
【解決手段】移載装置本体3と、移載装置本体3に後退位置と前進位置との間を移動自在に装着された支持プレート4と、支持プレート4を巻回するように設けられた移載ベルト8と、移載ベルト8の一部を移載装置本体3側に固定するための狭持手段60と、支持プレート4を後退位置と前進位置との間を往復移動させるための移動機構と、を備えた移載装置。狭持手段60は、移載装置本体3に固定された第1狭持部材64と、第1狭持部材64に揺動自在に装着された第2狭持部材66と、第2狭持部材66を狭持状態にロック保持するためのロック手段70と、を備え、移載ベルト8の一部は第1狭持部材64と第2狭持部材66との間に狭持される。
(もっと読む)
物品移載装置
【課題】 狭いスペースでも使用できる物品移載装置を提供する。
【解決手段】 フレームと、フレームに往復移動可能に設けられた移動体と、移動体の表面側と裏面側に周回されたベルトを備え、移動体はその駆動側を縦移動させて送り出すと先端側が先方に横移動し、駆動側を縦移動させて引き戻すと先端側が横移動して引き戻され、ベルトは周回方向任意箇所がフレームに固定されてリング状であり、移動体はその駆動側が縦移動する先端側が横移動し、ベルトは移動体の先端側が先方に横移動すると同方向に繰り出されてベルト先方の物品をベルトの上に掬い上げることができ、移動体の駆動側が縦方向に引き戻されて先端側が横方向に引き戻されると、その戻り方向に引き戻されてベルトの上の物品をベルトの先方に降ろすことができるようにした。
(もっと読む)
食品類の搬送方法及びその搬送装置
【課題】食品の製造工程において最終醗酵工程と焼成工程とを食品生地類を載置した展板に振動を与えずに、旋回し移載する食品類の搬送方法及びその搬送装置を提供する。
【解決手段】コンベヤ装置1は、パン製造工程の最終醗酵工程と焼成工程とを結ぶ搬送経路を、複数台の直線状の搬送コンベヤK1とカーブ状の搬送コンベヤとで構成し、接続部に、展板2の底面を接触または非接触で吸着保持し、展板2に上下の振動を与ずに先の搬送コンベヤから後の搬送コンベヤに移載する移載搬送手段8を設ける。搬送コンベヤに並列なコンベヤベルト4a,4bの間には、展板2の底面を接触または非接触で搬送コンベヤの上面と水平に保持する複数個の吸着保持手段15を表面に設けた昇降かつ旋回可能な円形状のターンテーブル16を設置し、このターンテーブル16の裏面側中心部に設けた支持軸をスライド搬送手段18上に立設する。
(もっと読む)
容器搬送装置
【課題】カップ状容器2の充填装置において、サイズの異なる容器2A、2Bに兼用するための型替えを容易にする。
【解決手段】チェーン24に一定の間隔で取り付けられている容器支持手段26が、小径の支持孔26Aaが形成された第1支持プレート26Aと、前記支持孔26Aaよりも大きい支持孔26Baが形成された第2支持プレート26Bを有しており、第2支持プレート26Bは第1支持プレート26Aに対して昇降可能であり、昇降する際に位置決めピン34によって両支持孔26Aa、26Baの位置がずれないようにしている。小型の容器2Aを搬送する場合には、第2支持プレート26Bを下降させて第1支持プレート26Aに重ねて両支持孔26Aa、26Ba内に挿入する。また、大型の容器2Bを搬送する場合には、第2支持プレート26Bを上昇させてその支持孔26Baにカップ状容器2Bを挿入する。
(もっと読む)
集積移送装置
【解決手段】 集積移載装置としての第1集積移載手段4Aは、物品2を収容した収容手段24を上下方向に循環搬送するアキュームコンベヤ12と、物品を1列に収容するポケットを複数段備えた回転バケット13を循環搬送する回転集積手段14とを備えている。
上記アキュームコンベヤが複数の収容手段が上下に整列するように受け渡し位置に移動させると、上記回転集積手段は上記上下複数段のポケット13aが上下に整列した各収容手段の高さに一致するように回転バケットを位置させ、各収容手段の物品が上下複数段のポケットに受け渡される。
そして上下複数段のポケットに受け渡された物品は、排出手段としての第1中間コンベヤ5Aに複数段に積層された状態で排出されるようになっている。
【効果】 物品を所定個数毎に集積するとともに、この物品を複数段に積層した状態で排出手段に排出することができる。
(もっと読む)
物品移載装置
【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、その一端部分の形状と他端部分の形状とが異なっている。物品搬送手段4は上記物品の載置方向が搬送方向に対して一定の角度を向くように上記物品を搬送するようになっている。
移載手段6は、物品の一端部分の形状に適合して該一端部分を保持する第1保持手段52と、該第1保持手段に対して上記物品の載置方向と同じ方向に整列するとともに、該第1保持手段を挟むように設けた、物品の他端部分の形状に適合して該他端部分を保持する2つの第2保持手段53と、上記第1、第2保持手段を上記物品の載置方向に往復動させる切替手段54とを備えている。
【効果】 両端部の形状が異なる物品であってもこれを保持することができ、上記移載手段の構成ならびに制御を容易とすることができる。
(もっと読む)
補助作業具
【課題】ロボットバンドを利用して食製品の上部にゴマなどの添え物を載置するなどの補助作業を行う補助作業具を提供する。
【解決手段】食製品5を保持自在なロボットハンド19に装着して補助作業を行うための補助作業具であって、食製品5に対して補助作業を行う補助作業部123Aを一端部に備えた補助作業具本体113の他端部に、ロボットハンド19に備えた複数の保持部材63A〜63Fによって把持される被把持部117を備え、この被把持部117は弾性部材によって構成してあり、前記被把持部117の上面に、ロボットハンド19に備えたエアー噴出口97と接続自在なエアー接続部121を備えている。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
パッケージの個別切り出し装置
【課題】パッケージを確実に切り出し一個ずつカップ内に投入する個別切り出し装置を提供する。
【解決手段】ドラム回転駆動部13を介して回転駆動される吸着回転ドラム14と、回転ドラムの円筒内周面に沿って仕切られパッケージを個別に収納するパッケージ収納部14bと、回転ドラムの外周曲面14eを貫通して設けられパッケージ収納部に収納されたパッケージを吸着保持する貫通孔14cと、回転ドラムを所定角度範囲で覆うように回転ドラムの外周曲面に沿って対向して配置されパッケージ収納部内を吸引する吸着チャンバー15と、パッケージ収納部に配設され回転ドラムから落下するパッケージを排出する排出機構23と、を備え、回転ドラムの外周曲面に対向して配置される吸着チャンバーとの間隙18aを囲むように擦動部18を設けるとともに、吸着チャンバー内の圧力を測定する圧力センサ19を吸着チャンバーに設け、吸着チャンバーの吸引力を調整する吸引力調整部を設けている。
(もっと読む)
異物排除装置
【課題】製造ラインで原材料を検査して異物を排除する際に、異物と共に排除される原材料の量を少なくして無駄を省く。
【解決手段】異物排除装置1は、ベルトコンベア2と、搬送される原材料Mに含まれた異物Fを検出するエックス線源4及びセンサ5を有し、位置情報検出手段6により原材料における異物の2次元の位置情報を取得する。さらにくり抜き手段9が該位置情報を受けて異物の2次元の位置に位置決めされ、下降して原材料に切り込むことにより、異物Fと異物Fの周囲にある原材料Mの一部のみを切断して除去する。
(もっと読む)
物品移載装置
【課題】 物品の移載後の向きを制御できる物品移載装置を提供する。
【解決手段】 第1の主軸2に軸支された回転ベース部3と、回転ベース部3上で第1の主軸周りの円周上に配置され、先端に吸着パッド40を有する複数の副軸4と、第1の主軸2に対向する第2の主軸5に取り付けられた主プーリ50と、各副軸4に取り付けられた複数の副プーリ41と、主プーリ50および各副プーリ41間に巻き掛けられたタイミングベルト42とから物品移載装置1を構成する。第1の主軸2の回転により回転ベース部3が回転して、副軸4が第1の主軸回りに回転し、これにより、吸着パッド40に保持されたワークWが第1の位置から第2の位置に移載される。このとき、第2の主軸5を回転させ、主プーリ50を回転させることにより、タイミングベルト42を介して副プーリ41が回転して副軸4が回転する。これにより、移載時のワークWの向きが変えられる。
(もっと読む)
システム、把持ヘッド、および、製品を移すための方法
本発明は、製品を移すためのシステムに関し、当該システムは、製品(5)を搬送方向に搬送するためのコンベア(3)を有し、かつ、該製品を該コンベアから他の位置へと移すための可動の把持ヘッド(9)を持った把持装置(7)を有し、前記把持ヘッドは、ベース(32)を有し、少なくとも1つの把持フィンガー(36)を有し、該把持フィンガーは、製品の第1の側を保持するための把持ポジションと、前記少なくとも1つの把持フィンガーを製品が通過方向に通過できる開ポジションとの間での動作のために、該ベースに可動に取り付けられており、前記少なくとも1つの把持フィンガーは、把持ポジションから開ポジションへと移動する時に、該把持フィンガーが最初に前記通過方向に該製品から遠ざかる方へ移動するように構成されている。本願発明は、さらに、把持ヘッドに関し、かつ、その把持ヘッドを用いて製品を他の位置に移す方法に関する。 (もっと読む)
整列移載装置
【課題】上流側のコンベヤから下流側のコンベヤ上に、前記下流側のコンベヤを停止したり間欠駆動させることなく直接に整列移載する。
【解決手段】チェーン36に支持部材11を取付固定し、サーボモータ37で回転駆動することで、整列移載ベルトコンベヤを支持する支持部材11が、搬送コンベヤ3の搬送方向Yに沿って進退移動する。このサーボモータ37は、食品の移載時には、搬送コンベヤ3の搬送速度に基づき、支持部材11の移動速度と搬送コンベヤ3の搬送速度とがほぼ一致するように回転駆動される。整列移載ベルトコンベヤ2を支持する支持部材11が、搬送コンベヤ3と同期して移動するので、先端部材が移動しながら、搬送コンベヤ3のコンベヤベルト3A上に食品を移載することで、コンベヤベルト3A上に、食品Sがコンベヤ幅方向に一列に並ぶように移載される。
(もっと読む)
食品移送装置
【課題】一定数の粒状食品を移送する簡易な装置を提供する。
【解決手段】本発明は、粒状食品を移送する食品移送装置に関する。本発明による食品移送装置(1)は、多数の粒状食品(B)が載せられ且つ粒状食品(B)が上流側から下流側に移動するように構成されたトラフ(6)と、トラフ(6)の下流側に配置され、下流側に移動してきた粒状食品(B)を一列に受入れる溝部(26)と、溝部(26)に受入れられた粒状食品(B)を移送するための移送部(8)を有する。移送部(8)は、溝部(26)に受入れられた一定数の粒状食品(B)を吸着するための吸着開口(42)と、吸着開口(42)を移動させるためのアクチュエータ(46,48)を有する。
(もっと読む)
搬送移載装置
【課題】複数の物品を迅速にしかも繰り返し確実に容器へ挿入でき、しかも複数の物品を重ねて挿入できる搬送移載装置を提供する。
【解決手段】搬送移載装置4は、多段トレー5と、搬送手段6と、吸着パッド7,8と、吸着パッド7,8の位置を相対的に接近又は離間させる変位手段と、移送手段9と、容器供給手段10とを備える。物品1,2は、互いに高さを違えるように多段トレー5に載せられる。搬送移載装置4によれば、搬送手段6が多段トレー5と共に物品1,2を搬送し、これらの物品1,2を吸着パッド7,8にそれぞれ吸着させた状態で、上記の変位手段が、吸着パッド7,8を相互に接近させることにより、物品1,2を重ね合わせた後、物品1,2を容器3に挿入できる。
(もっと読む)
1 - 20 / 33
[ Back to top ]