
Fターム[3F072GG03]の内容
Fターム[3F072GG03]に分類される特許
41 - 60 / 168
染色用容器の回収洗浄装置
【課題】 染色用容器に収容された被染物及び染液の回収並びに染色用容器の洗浄を、迅速且つ容易に行うことができる染色用容器の回収洗浄装置を提供する。
【解決手段】 上部が開口し被染物及び染液が収容された容器Pを上下反転させる容器反転手段10と、反転した容器Pから落下する被染物及び染液を受ける回収手段20と、反転した容器Pの内部に洗浄液を噴射する洗浄手段30とを備え、回収手段20は、底部に染液の排出部を有する受器と、前記受器を傾動可能に支持する受器支持手段とを備える染色用容器の回収洗浄装置。
(もっと読む)
チューブの箱詰め装置、箱詰め方法及びチューブの箱詰め装置用作業ハンド

【課題】ロボット等でチューブの箱詰め動作を自動化するにあたり、不用意なチューブの抜き出しを確実に発見できる技術を提供する。
【解決手段】箱詰め装置は、ロボットにより作業ハンド16を移動させてチューブTを箱詰めする。チューブTは予め物品列TAの状態で整列されており、作業ハンド16は各フィンガ18にチューブTを引っ掛けた状態で物品列TAを保持し、収容箱14内に箱詰めする。両側のフィンガ18にはそれぞれ内部にフォトセンサ24が収容されており、その間のフィンガ18には径方向に貫通孔が形成されている。フォトセンサ24の検出光Lは貫通孔を通って一方から投光され、他方で受光される。箱詰め後に作業ハンド16を退出させてフォトセンサ24による検出を行い、チューブTが残存しているか否かを自動的に検出する。
(もっと読む)
液体用容器の製造機器
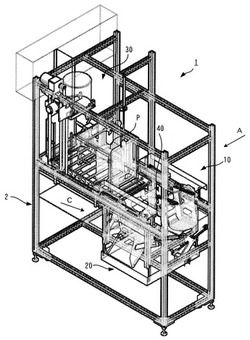
プラスチックプリフォーム(10)をプラスチック容器(20)に成形する成形ユニット(2)と、前記プラスチック容器に液体を充填する充填ユニット(4)とを備え、前記充填ユニット(4)がプラスチック容器の運搬方向(R)において成形ユニット(2)の下流側に位置する液体用容器(10)の製造機器に関する。成形ユニット(2)はプラスチックプリフォーム(10)を供給する供給領域(22)と、プラスチック容器(20)を成形ユニット(2)から排出する排出領域(24)とを備える。充填ユニット(4)はプラスチック容器を充填ユニット(4)に供給する供給領域(42)と、成形ユニット(2)から排出する排出領域(44)とを備え、インターフェースとして使用される少なくとも1つの運搬装置(30)は成形ユニット(2)の排出領域(24)と充填ユニット(4)の供給領域(42)との間に位置し、前記運搬装置はプラスチック容器を少なくとも一部のセクションに沿って成形ユニット(2)と充填ユニット(4)間で個々に運搬する。運搬装置(30)は、容器を機器に入れる操作をする少なくとも1つの別ユニット(6、7)を成形ユニット(2)と充填ユニット(4)の間に挿入できるように設計される。前記別ユニット(6、7)は成形ユニット(2)と充填ユニットの間の容器(20)の運搬の流れが追加のユニット(32)を介して通るように運搬装置(30)に連結され得る。 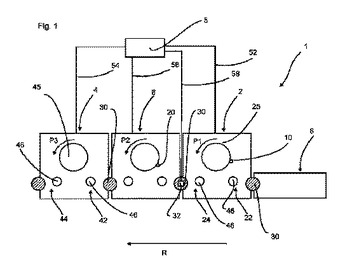 (もっと読む)
(もっと読む)
組合せ計量装置
【課題】アームと容器とが分離されるときに作用するアームへの突発的負荷を軽減した、組合せ計量装置を提供する。
【解決手段】組合せ計量装置10では、アーム21が、連結ギア243の回転を拘束する機能と連結ギア243を回転させる機能とを含む第1遊星ギア211及び第2遊星ギア212を有している。そして、連結ギア243が拘束されることによって第1遊星ギア211又は第2遊星ギア212の回転力が容器保持部材24をアーム21から押し出す力に変換される。その結果、容器保持部材24がアーム21から容易に開放され、アーム21に作用する突発的負荷が軽減される。
(もっと読む)
組合せ計量装置
【課題】容器が搬送中に好ましくない姿勢になっていても、容器に所定の動作を行わせることにより所定の姿勢まで回復させることができる組合せ計量装置を提供する。
【解決手段】組合せ計量装置10では、容器Cが、角度θ傾けられた姿勢でロードセル25aに取り付けられて計量される。マグネット25amとマグネット245aとは、互いに対峙する位置が一致するように引き合って自動的に位置補正するので、搬送中に容器Cが好ましくない姿勢になっていても、計量によって、或いはアーム21が計量時と同様の動作で容器Cをロードセル25aに渡すことによって、容器Cは角度θ傾いた一定の姿勢へ補正される。
(もっと読む)
組合せ計量装置
【課題】容器の周回軌道が上下方向に複数段重ねられた組合せ計量装置において、被計量物の排出能力を向上させた組合せ計量装置を提供する。
【解決手段】組合せ計量装置10では、第1搬送部111の容器入替機20は、第1軌道上にある容器のうち、選択された複数の容器Cの順番を第1軌道上で入れ替える。第2搬送部112の容器入替機20、第2軌道上にある容器のうち、選択された複数の容器Cの順番を第2軌道上で入れ替える。容器入替機20は、各軌道上での容器の入れ替え動作以外に、第1軌道上で待機する容器Cを順次第2軌道上に移動させ被計量物の排出を終えた容器Cを順次第1軌道上へ戻す受け渡し動作をも行うことができる。
(もっと読む)
包装済石英ガラスルツボ用クレーン装置およびこの装置を用いる包装済石英ガラスルツボの梱包方法
【課題】包装済ルツボのハンドリングを人手に頼ることなく機械を介して実現する、包装済ルツボのハンドリングに適したクレーン装置を提供する。
【解決手段】包装済の石英ガラスルツボを配置した吊り上げ場所の上方と梱包用コンテナを配置した吊り降ろし場所の上方との間の経路上を往復動可能に、かつ該経路から前記吊り上げ場所および吊り降ろし場所のそれぞれにおいて前記経路に対して昇降可能に設置されるクレーン装置であって、前記昇降方向に延びる4本のアームを有し、該4本のアームを四角形の頂点に配置するとともに、該四角形の対角線上のアーム対を相互に進退可能に設け、各アームは先端に前記アームの進行方向に延びる爪を有するものとする。
(もっと読む)
物品移載装置
【課題】キャリアに収容された容器を整列状態で搬送する第1コンベヤから、複数の保持手段を備えた移載手段によって容器を保持して第2コンベヤに移載する物品移載装置において、第1コンベヤの容器に欠落があった場合に、ストック部にストックした容器を補給する。
【解決手段】検知手段18によって第1コンベヤ6上の容器4に欠落があったことを検出すると、複数の保持手段のうち、この欠落した位置の容器4を保持する保持手段を特定する。移載手段20を前記ストック部12に移動させ、特定された保持手段に容器4を保持させた後、その他の保持手段には、第1コンベヤ6上の容器取り出し位置Tに停止している容器4を保持させ、全ての保持手段に保持されている容器4を第2コンベヤ10のケース8内に挿入する。
(もっと読む)
容器移送装置
【課題】入口スターホイール10からペットボトル6が供給されなかった場合でも、トップロケータ16がスターホイール10やセンターガイド12にダメージを与えないようにする。
【解決手段】回転体44に、上下に対応して設けられた容器台14とトップロケータ16によってペットボトル6を挟持して回転移送する。トップロケータ16は、メインスプリング54によって下方へ付勢されたロッド70と、ロッド70の下端に昇降自在に支持されたガイドコーン72と、ロッド70とガイドコーン72とを昇降方向に連結するロック機構82と、ガイドコーン72がペットボトル6に当接する前にペットボトル6の天面6aaに当接してロック機構82を作動させる作動部材76を備えており、ロッド70がペットボトル6に押し上げられたときにロック機構82がロッド70とガイドコーン72とを連結する。
(もっと読む)
搬送装置
【課題】大きさが異なる各種の被搬送物に容易に対応できる搬送装置を提供する。
【解決手段】搬送装置6は、第1被噛合部61を有する第1回転体11を備え、第1回転体11には一方側挟持体41を設ける。搬送装置6は、第2被噛合部62を有する第2回転体12を備え、第2回転体12には他方側挟持体46を設ける。搬送装置6は、第1被噛合部61と噛合する第1噛合部71および第2被噛合部62と噛合する第2噛合部72を有する歯車66を備える。両挟持体41,46間の離間距離の調整時に、第1回転体11および第2回転体12が互いに異なる方向に同じ回動角度だけ回動する。
(もっと読む)
ワーク移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】ワークWを第一位置P301と第二位置P302との間で移載するワーク移載装置300であって、ワークWを把持するチャック部11、12、13を有するチャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に接続され、チャックユニット10を配列変換部20ごと第一位置P301と第二位置P302との間で移動させるワーク搬送部30と、を備える。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
移載装置
【課題】電子部品を所定のキャリアに貼着する場合、電子部品とキャリアの粘着シールの間に気泡が生じると、後工程で電子部品の設置高さが異なり接点の位置がずれたり、ワイヤボンディングの際の押圧で電子部品が暴れて不良品の発生が多い原因になっていた。
【解決手段】本発明ではキャリアフレームの升目状枠の下に弾性体を置くことで気泡の発生を防止し、不良品の発生率を激減することが出来る。また、スローリークする導電性のゲル素材を用いることにより、電子部品の回路に影響することなく静電気をアースすることが出来る。
(もっと読む)
容器を搬送する方法及びその方法を実施する装置
底(102)と該底の反対側の端部にある口(103)とを有する本体を備えた容器(100)を搬送する方法であって、容器と共に移動可能なサポートによって容器の底の部分で個々の容器を支持し、容器の搬送経路上で容器の口をセンタリングするステップであって、センタリングは容器の口(103)の近傍で容器の部分をクランプすることによって行うステップと、支持された容器を移動するステップと、を備える。 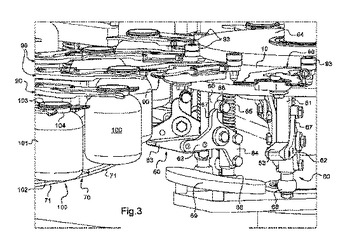 (もっと読む)
(もっと読む)
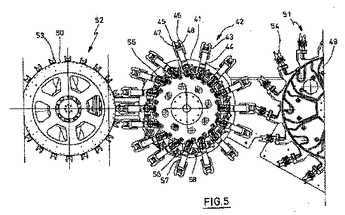
容器をブロー成形し充填するための方法および装置
本発明による方法と装置は、容器をブロー成形して充填するために用いる。パリソンをまず熱コンディショニングし、次にブロー成形型内部でブロー圧を作用することにより容器に成形する。ブロー成形した容器を、その搬送経路の少なくとも一部分に沿って、回転する受け渡しホイールによって保持されている担持要素によって位置決めする。前記受け渡しホイールは、容器製造用のブローモジュールと容器充填用の充填モジュールとの間の連結部の少なくとも一部を成している。容器の搬送方向において前記受け渡しホイールの前方に前記ブローモジュールの搬出ホイールは容器用の担持要素を備え、前記搬送方向において前記受け渡しホイールの後方に前記充填モジュールの搬入ホイール(50)が容器(2)用の担持要素(54)を備えている。前記受け渡しホイール(41)の領域における前記担持要素(42)の数量を生産速度に依存して変化させる。
 (もっと読む)
(もっと読む)
箱詰め装置
【課題】互いに接触または近接した状態で搬送された複数の箱詰め対象体を互いに離間した状態で箱体に箱詰めする。
【解決手段】互いに接触または近接した状態で搬送された複数のテープカートリッジ200を所定長さだけ互いに離間した状態で整列させる整列機構11と、離間して整列された各テープカートリッジ200の整列状態を維持しつつ各テープカートリッジ200を保持して箱体に箱詰めする箱詰め機構13とを備え、整列機構11は、互いに接触または近接した状態で搬送された各テープカートリッジ200を1つずつ独立して載置可能に構成された複数の載置部22a〜22eと、各載置部22a〜22eにそれぞれ取り付けられた被案内部と、載置部22a〜22eが所定長さだけ互いに離間するように被案内部23a〜23dを案内する案内部24a,24bと、案内部24a,24bを移動させるエアシリンダ25とを備えて構成されている。
(もっと読む)
ワーク移載装置
【課題】動作の無駄を省いて処理能力を向上できるとともに故障の発生を少なくでき、しかも構造が簡単で安価に製作できるとともに小型に構成可能なワーク移載装置を提供する。
【解決手段】ワークとしてのカップ飲料1を保持するためのワーク保持手段41を有する1組のワーク保持ユニット42であって、回転軸43を挟んでその両側に設けた1組のワーク保持ユニット42と、回転軸43を中心とした回転運動と回転軸43の軸方向への直線運動とによって、一方のワーク保持ユニット42をカップ容器の受取位置から受渡位置へ移送するとともに、他方のワーク保持ユニット42をカップ飲料の受渡位置から受取位置へ移送して、両ワーク保持ユニット42を受取位置と受渡位置とに交互に位置切換えする位置切換手段44とを備えた。
(もっと読む)
ワーク分流装置
【課題】必要な数の下流側搬送ラインに対してワークを無理なく分流させることができるとともに、下流側搬送ラインの配置自由度が大きく、しかも安価に製作可能で作動に対する信頼性も高い分流装置を提供する。
【解決手段】カップ飲料1を保持するための複数の凹部31a、51aを周方向に設定間隔おきに外周部に形成した回転体31、51と、カップ飲料1を吸着保持する吸着パッド33、53と、隣接する2つの回転体31、51の突合せ位置において、両回転体31、51の凹部31a、51aが順次対面するように、隣接する回転体を同期させて相互に逆方向に送り駆動する駆動手段と、複数の吸着パッド33、53を吸着状態と非吸着状態とに個別に切換える切換手段と、切換手段を制御して、上流側の回転体31に供給されたカップ飲料1を複数のラインLa、Lb、Ln、Lsに分流させる制御手段とを備えた。
(もっと読む)
仕分装置
【課題】効率良く仕分作業ができる仕分装置を提供する。
【解決手段】仕分装置1は、収納容器A内から物品Wを取り出す取出手段11と、この取出手段11で取り出した物品Wを搬送する第1物品搬送手段12とを備える。仕分装置1は、物品Wを搬送する第2物品搬送手段41と、オーダ情報に基づく数の物品Wを第1物品搬送手段12上から第2物品搬送手段41上に押し出して載せ換える押出手段46とを備える。第2物品搬送手段41上の物品Wを保持手段51のロボットハンド部で保持して出荷容器B内に投入する。
(もっと読む)
可変ピッチ搬送ホイールを有する、容器を製造するための装備
本発明は、容器(12)を製造するための設備(10)に関する。この設備は、第1のピッチ(P1)を有するブロワ(14)と、第2のピッチ(P2)を有するフィラー(16)との間に配置された少なくとも1つの可変ピッチホイール(38)を有し、また、初期ピッチ(P)と最終ピッチ(P’)との間で連続している2つの搬送手段(40)の間のピッチを選択的に変化させるように構成された制御手段によって制御される搬送手段(40)を有する。初期ピッチ(P)は、例えば、第1のピッチ(P1)の1倍又は2倍に等しく、また、最終ピッチ(P’)は、第2のピッチ(P2)に等しい。 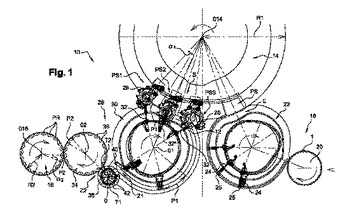 (もっと読む)
(もっと読む)
41 - 60 / 168
[ Back to top ]