
Fターム[3F072GG03]の内容
Fターム[3F072GG03]に分類される特許
21 - 40 / 168
容器移送装置
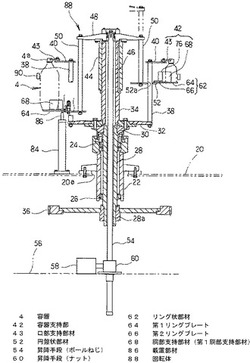
【課題】胴部支持部材68、76と口部支持部材43を有する容器支持部42を、サイズの異なる容器4に兼用するために調整する。
【解決手段】リング状部材62に容器4の胴部を支持する胴部支持部材68、76が設けられ、リング状部材62の下面側を支持する円盤状部材52は、容器4の口部を支持する口部支持部材43と一体的に回転する。リング状部材62の係合ピン70を円盤状部材52の係合穴82に嵌合させて両部材62、52を回転方向に連結している。円盤状部材52は昇降可能になっており、下降時にリング状部材62を下方に固定配置された載置部材86上に載せることにより両部材を切り離すことができる。移送する容器4のサイズが変更になったときには、両部材を切り離して円盤状部材52を回転させることにより両部材の円周方向の位置を変更し、さらに高さも変更する。
(もっと読む)
PTPシート搬送装置

【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
容器用キャップの移送装置および検査装置
【課題】キャップを掻き込み用スターホイールに送り込む際に速度制御を自由に行うことができ、キャップの推進力を適切に調整することができる容器用キャップの移送装置を提供することを目的とする。
【解決手段】真空源に接続された円弧状溝34hを有した固定側部材34と、固定側部材34の上方に配置され、複数の貫通孔33hを有するとともに固定側部材34に摺接しながら回転するターンテーブル板33とを備え、ターンテーブル板33の回転により、ターンテーブル板33の貫通孔33hが固定側部材34の円弧状溝34hに断続的に連通し、貫通孔33hが円弧状溝34hに連通している間にターンテーブル板33上の容器用キャップ1を吸着して円弧状軌道に沿って移送し、貫通孔33hと円弧状溝34hの連通を断つことにより容器用キャップ1をスターホイール4の凹部に受け渡すようにした。
(もっと読む)
計数機
【課題】高速運転を確保しつつ、回転コンベアの収容空間へ確実に製品を収容することが可能な計数機を提供する。
【解決手段】本実施形態に係る計数機1は、所定の周回経路上で周回する周回部材20と、周回部材20に所定の間隔で設置された多数の仕切部材21とを有し、製品供給部25に落下してくる製品を仕切部材21間の収容空間に一枚ずつ収容させて搬送する回転コンベア装置10と、製品排出部29において所定の枚数単位で製品を押し出して排出する押出部材60と、周回経路と製品供給部25において上側で重なると共に製品排出部29において離れる所定の補助周回経路上で周回する補助周回部材40と、補助周回部材40に仕切部材21と同じ間隔で設置された多数の補助仕切部材41とを有し、補助仕切部材41が製品供給部25において仕切部材21の上側を同期して通過する補助装置30と、を備える。
(もっと読む)
搬送装置及び搬送装置の制御方法
【課題】把持手段の開閉によって回転体の速度が変化することを抑制できる搬送装置及び搬送手段を得ることを目的とする。
【解決手段】円形であり、該円形の中心を軸に回転する回転体と、回転体を回転させるサーボモータ34と、回転体の周縁部に等間隔で複数設けられ、回転体が発生させるトルクによって開閉することで搬送物を把持し、回転体が回転した状態で、該搬送物の受け取り及び受け渡しを行うグリッパを備えている。そして、グリッパにより回転体に与えられる外乱トルクを打ち消した所定のトルクで回転体が回転するようにサーボモータ34を制御する。
(もっと読む)
容器搬送装置
【課題】ネック部4bを把持されて吊り下げられた状態で搬送されている容器4を、底部側から押し上げて上昇させる際に、ネック部4bを把持しているグリッパ72に負荷がかからないようにする。
【解決手段】第1回転ホイール10では、第1グリッパ48で容器4のネック部4bに形成されたフランジ4cの下方を把持してネック搬送し、第2回転ホイール12では第2グリッパ72でネック部4cの上部を把持して搬送する。第2回転ホイール12の搬送経路の下方に、下流側に向けて次第に上昇する傾斜区間104aを有する支持プレート104を配置し、容器4の底部をこの支持プレート104に当てて上昇させる。第2グリッパ72は容器4を把持したまま上方へ退避できるようになっており、容器4の上昇に伴って上方へ移動する。
(もっと読む)
回転式容器搬送装置
【課題】ネック搬送している容器4の底部側が遠心力で外方へ振られることを防止する。
【解決手段】一対の把持部54を有するグリッパ48が回転体10aの外周部に円周方向等間隔で設けられており、このグリッパ48によって容器4のネック部4bに形成されているフランジ4cよりも下側を把持して搬送する。前記グリッパ48に、前記容器4のフランジ4cよりも上方に、回転体10aの中心側から当接する第1支持体(上ガイド部材)58と、フランジ4cの下面側に、回転体10aの中心側から当接する第2支持体60(下ガイド部材)とを設ける。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
容器の抜き取り方法および容器の抜き取り装置
【課題】トレイ2の嵌合部6A、6Bに嵌合して保持されているシリンジ4を、嵌合部6A、6Bから外して吸盤16、16で取り出せるようにする。
【解決手段】長方形のトレイ2に、平行な2辺2a、2bと直交する方向を向けて2個一組の嵌合部6A、6Bが複数組形成され、各組の嵌合部6A、6Bの間にシリンジ4が嵌合して保持されている。トレイ2の前記2辺2a、2bの一方側を下方の載置プレート34と上方のロックプレート36で挟持する。挟持されている部分から遠い側の嵌合部6Bを第1プッシャ12により押圧し、トレイ2を傾斜させることにより挟持されている側の嵌合部6Aからシリンジ4のこの部分を外し、続いて、他辺2bに近い側を第2プッシャ14により押圧して、さらにトレイ2を傾斜させ、こちらの嵌合部6Bからもシリンジ4を外す。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
小袋投入装置
【課題】搬送コンベアと投入先とを離隔して製品への異物混入が防止でき、デッドスペースが少なく、連包パウチのカット位置が安定して傾きのない安定したカットラインが得られる、小袋投入装置を提供する。
【解決手段】小袋投入装置の搬送ライン20において、第1の搬送コンベア26で連包パウチ10を搬送部材26u・26dで上・下から挟み込んで水平方向に間欠的に搬送しる、前記カッター部28で、前記第1の搬送コンベア26によって搬送された連包パウチ10を搬送一時停止時に横シール部10aを切断して個々の小袋12に分け、第2の搬送コンベア30で、切断された各小袋12を載置して搬送し、吸着ユニット34で、前記載置台32上の小袋12を先端の吸引パッド34cで吸引して、前記搬送ライン20に平行かつ下方に位置し容器投入ライン36上を搬送される容器14内に投入する。
(もっと読む)
容器払い出し装置
【課題】容器の容量や種類に関わらず、容器を安定して搬送することができ、低コストで生産効率を向上させることのできる容器払い出し装置を提供することを目的とする。
【解決手段】エアブローによりガイドレール61、61に沿って搬送される容器100を、払い出しロータ71により一本ずつ払い出し、払い出された容器100を、受渡しホイール72によりスターホイール50のグリッパ52に受け渡すようにした。このようにして、スクリューを用いること無く、容器100を1本ずつ等ピッチで払い出して供給する。このとき、払い出しロータ71、受渡しホイール72は、それぞれ容器100の口部101に対向する。
(もっと読む)
搬送ホイール用容器回動抑制機構
【課題】複数のホイールを組み合わせての容器のネック搬送において、容器のホイール搬送途中およびホイール間の受け渡しの全区間を通して、容器の中心軸回りの回動を抑制する。
【解決手段】容器胴部(平坦部)CBに当接又は近接する平坦部22aを有する第2容器回動抑制機構22をグリッパーの下部に設ける。なお、平坦部22aはホイールの中心と各グリッパーの中心を結ぶ直線に直交する平坦面を有し容器胴部CBに当接又は近接するように構成する。
(もっと読む)
容器搬送装置
【課題】メインロータを回転可能に支持する軸受ユニット内にチャンバを形成することにより、吸着カップに負圧を供給するためのロータリバルブの上流側の真空吸引容量を増加させることができる容器搬送装置を提供する。
【解決手段】容器台22に設けられ容器1の底面を吸着する吸着カップ25と、固定側部材33に形成された円弧状溝33gと回転側部材36に形成された連通孔36hとが断続的に連通するように構成されたロータリバルブ31と、メインロータ10を回転可能に支持するとともに支持板11に固定された軸受ユニットBU1とを備え、軸受ユニットBU1は、メインロータ10の主軸20を回転可能に支持する軸受14を保持する内筒13と、内筒13を収容する外筒12とからなり、内筒13と外筒12との間にチャンバ42を形成し、チャンバ42をロータリバルブ31の円弧状溝33gに連通させるとともに真空源に連通させるようにした。
(もっと読む)
缶蓋列用移動装置
【課題】所定数量に仕切られた缶蓋列を、高速で、かつ、正確に、インフィード手段からディスチャージ手段に移動させることができ、また、エアシリンダなどによる異常停止を効果的に防止したり、あるいは、定期メンテナンスの際、効率よくエアシリンダなどを交換することができる、生産性及び経済性などに優れた缶蓋列用移動装置、及び、缶蓋製造装置の提供を目的とする。
【解決手段】缶蓋列用移動装置1は、インフィード手段2、ピックアップ手段3、ディスチャージ手段4、及び制御手段5を備え、ピックアップ手段3が、インフィード手段2から所定数量に仕切られた缶蓋列11を摘み上げ、ディスチャージ手段4に移動させる。
(もっと読む)
箱詰め装置
【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
星形コンベヤ用のグリップ装置および星形コンベヤ
本発明は、星形コンベヤ(1)、および星形コンベヤ(1)または類似の搬送ユニット用のグリップ装置(2)に関し、グリップ装置(2)は、容器または類似のボディをグリップ位置において把持および保持するために対応するペアで配置されるグリップアームを備え、グリップ装置(2)は、前記グリップアーム(4)からは独立している少なくとも1つの位置決めエレメント(6)を備える。前記位置決めエレメント(6)は、把持される容器(3)を前記グリップ位置において少なくとも1つの軸に沿って位置決めするように設計されている。 (もっと読む)
容器搬送装置
【課題】容器が容器台に乗り移る時には摩擦抵抗が小さいために容器台の中心に乗りやすく、容器を自転させる時には摩擦抵抗が大きいために容器に回転を確実に伝えることができる容器台(壜台)を備えた容器搬送装置を提供する。
【解決手段】容器1の底部1aを真空吸着して容器1を支持する容器台20をメインロータ10に複数配置した容器搬送装置において、容器台20は、容器1を載置する容器台本体21と、容器台本体21の上面に装着され容器台本体20の外周より内側に配置されたリング状のゴム材31と、リング状のゴム材31の内周より内側に配置された吸着カップ22とを備え、容器台20は、容器1をスターホイールから受け取って支持するとき、容器1の底面外周部をリング状のゴム材31で支持し、容器1の底面中央部を吸着カップ22で真空吸着し、容器台20は、リング状のゴム材31を介して容器台20の回転を容器1に伝えて容器を自転させる。
(もっと読む)
21 - 40 / 168
[ Back to top ]