
Fターム[3F072JA09]の内容
Fターム[3F072JA09]に分類される特許
1 - 20 / 80
回転円板式の物品供給装置
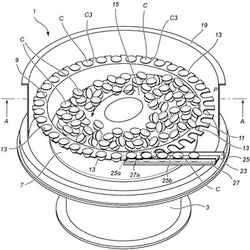
【課題】底部に突起部を有するなどして、底部を下にして真っ直ぐに立てることが難しいフランジ付きの物品をその底部を下した姿勢で整列させることができる回転円板式の物品供給装置を提供する。
【解決手段】回転円板15と回転容器7が反時計回りの方向へ回転する。回転容器7内の食品容器Cは、回転円板15の乗り移りポイントPにおいて旋回トラック11へ乗り移る。切欠き13の幅寸法Nは食品容器Cの本体C1の最大の直径D1より僅かに大きく、フランジC3の直径D2より小さい寸法に設定されているので、底部を下側にした姿勢の食品容器Cのみが切欠き13に落ち込み、且つフランジC3が切欠きの縁に掛かった状態で係止されて保持されて、整列される。
(もっと読む)
ピッキングシステム

【課題】複数のワークを向きを揃えて載置する場合に、複数のワークの保持を短時間で行うこと。
【解決手段】ロボット2a,2bは、ワークwを保持する複数の保持部23a,24a,23b,24bと、アーム先端部21a,21bに対して回転可能に設けられ、複数の保持部23a,24a,23b,24bを支持する支持部22a,22bとを備える。また、制御装置は、保持部23a,24a,23b,24bを用いて保持したワークwごとに、かかるワークwの向きが所定の向きとなるように支持部22a,22bを所定量回転させたうえでかかるワークwを所定の場所へ載置する載置動作の実行をロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像の画像領域を分割した分割領域ごとに、分割領域に属するワークに対する保持動作の実行をかかる分割領域に対応するロボット2a,2bに対して指示する。
(もっと読む)
ピッキングシステム
【課題】作業効率の向上を図ること。
【解決手段】カメラ3が、コンベアの搬送路上を撮像し、制御装置5が、カメラ3によって撮像された画像に基づいて搬送路上のワークを検出するとともに、検出したワークの保持動作をロボット2a,2bに対して指示し、ロボット2a,2bが、制御装置5からの指示に従って保持動作および移動動作を行う。特に、制御装置5は、カメラ3によって撮像された画像に基づいてワークの向きを検出し、検出したワークの向きに対応するロボット2a,2bに対してかかるワークの保持動作を指示する。
(もっと読む)
ワーク搬送検査装置およびワーク搬送検査方法
【課題】検査手段に到達したワークに対し、検査工程を中断することなく連続的に検査を行なって、全体としての作業効率の向上を図る。
【解決手段】ワーク搬送検査装置は複数のワーク収納孔4を有する搬送テーブル2を備え、搬送テーブル2の周縁に沿って、分離供給部6と、方向判別部7と、方向変換部8と、検査部9と、分離排出部10とが設けられている。各ワーク収納孔4は搬送テーブル2の外縁から内側に向って搬送方向に直交して延びる第1孔4aと、搬送テーブル2の外縁に沿って第1孔4aと直交して延びる第2孔4bとを有し、T字形形状を有する。分離供給部6はワークWを第1孔4a内に収納し、第1孔4a内のワークWは方向変換部8によって外方へ移動した後、90°回転して第2孔4b内に収納される。検査部9は第2孔4b内に収納されたワークWのうち搬送テーブル2の外縁方向を向く面に対して特性検査が行なわれる。
(もっと読む)
トレイ自動搬送システム及び移載装置
【課題】工業用酵素を生産するためのトレイをカセットに自動で積み込み/積み下ろしができかつ工業用酵素を生産する上での衛生面及び培養中の環境管理面に優れるトレイ自動搬送システム及び移載装置を提供することを課題とする。
【解決手段】工業用酵素を生産するためのトレイを自動で搬送するトレイ自動搬送システムであって、複数のトレイTを積載するカセットCは、上下方向に延びる四本の支柱と、対向する支柱間に上下方向に複数設けられた横材を有し、複数のトレイTをカセットCに積み込む移載装置2は、積み込み時にトレイTがカセットCの対向する位置に設けられた二本の横材に載置される前にトレイTが二本の横材間を移動するときにトレイTを支持部26aで支持する支持機構26を有することを特徴とし、複数のトレイTをカセットCから積み下ろす移載装置も同様の支持機構を有する。
(もっと読む)
部品搬送装置
【課題】回転式の部品搬送装置において、簡潔な構造を採用しながらも、回転軸方向の移動ストロークを増大させる。
【解決手段】部品搬送装置1において、回転するベース部材30に対して保持部42を自転軸方向に往復移動自在に周方向に複数配置する。更に前記固定部材100側には、保持部42と係合して自転軸方向に移動させる案内機構120を配置する。ベース部材30の回転に連動して受入領域から搬出領域に搬送される際に、案内機構120によって電子部品を上下動させる。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
ピッチ変換移載装置
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
容器保持搬送装置および容器保持搬送方法
【課題】容器の保持搬送を安定して行う。
【解決手段】円周経路Rに沿って旋回移動して容器を保持搬送する容器保持部20に、左右一対の開閉軸31R,31Lに開閉自在に支持された左右のクランプアーム21R,21Lを設け、クランプアーム21R,21Lの遊端側に、容器Bの胴部を把持可能な2つの把持面25o,25iを有する把持爪25を揺動軸23を中心に開閉自在に設け、把持爪25を開動方向に付勢する開放コイルばね24と、把持爪25の閉止限となる閉止ストッパ26とを設け、左右の揺動軸23の軸心を結ぶ直線が円周経路Rより外側に位置するように揺動軸23を配置し、左右の把持爪25間から容器保持位置P側に押し込まれる容器Bが、揺動軸23の軸心を結ぶ直線を越え、クランプアーム21R,21Lの閉動力により把持爪25を閉動させて容器Bを4つの把持面25o,25iで容器Bの胴部を抱き込むように保持し容器保持位置P迄移動する。
(もっと読む)
容器搬送装置
【課題】カップ状容器2の充填装置において、サイズの異なる容器2A、2Bに兼用するための型替えを容易にする。
【解決手段】チェーン24に一定の間隔で取り付けられている容器支持手段26が、小径の支持孔26Aaが形成された第1支持プレート26Aと、前記支持孔26Aaよりも大きい支持孔26Baが形成された第2支持プレート26Bを有しており、第2支持プレート26Bは第1支持プレート26Aに対して昇降可能であり、昇降する際に位置決めピン34によって両支持孔26Aa、26Baの位置がずれないようにしている。小型の容器2Aを搬送する場合には、第2支持プレート26Bを下降させて第1支持プレート26Aに重ねて両支持孔26Aa、26Ba内に挿入する。また、大型の容器2Bを搬送する場合には、第2支持プレート26Bを上昇させてその支持孔26Baにカップ状容器2Bを挿入する。
(もっと読む)
PTPシート搬送装置
【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
ロール状物品用の保管設備
【課題】搬出部から搬出されるロール状物品の巻き方向が、必要な巻き方向と異なる場合において、必要な巻き方向に簡単に調整することが可能なロール状物品用の保管設備を提供する。
【解決手段】シート状体が巻き取られたロール状物品Rを横倒れ姿勢で収納する収納部S1を備える物品保管部H1と、ロール状物品Rが横倒れ姿勢で搬入される搬入部N1と、物品保管部H1に収納したロール状物品Rを横倒れ姿勢で搬出する搬出部T1と、搬入部N1に搬入されたロール状物品Rを収納部S1に収納しかつ収納部S1に収納されたロール状物品Rを搬出部T1に取り出す物品搬送手段とが設けられ、搬出部T1に、ロール状物品を左右反転する出庫用左右反転手段が設けられている。
(もっと読む)
計数機
【課題】高速運転を確保しつつ、回転コンベアの収容空間へ確実に製品を収容することが可能な計数機を提供する。
【解決手段】本実施形態に係る計数機1は、所定の周回経路上で周回する周回部材20と、周回部材20に所定の間隔で設置された多数の仕切部材21とを有し、製品供給部25に落下してくる製品を仕切部材21間の収容空間に一枚ずつ収容させて搬送する回転コンベア装置10と、製品排出部29において所定の枚数単位で製品を押し出して排出する押出部材60と、周回経路と製品供給部25において上側で重なると共に製品排出部29において離れる所定の補助周回経路上で周回する補助周回部材40と、補助周回部材40に仕切部材21と同じ間隔で設置された多数の補助仕切部材41とを有し、補助仕切部材41が製品供給部25において仕切部材21の上側を同期して通過する補助装置30と、を備える。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
箱詰め装置
【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
ワークの外観検査装置およびワークの外観検査方法
【課題】搬送テーブル上でワークを正確に位置決めすることができ、かつワークに対する静電破壊や特性劣化を生じさせることのないワークの外観検査装置を提供する。
【解決手段】ワークの外観検査装置30は、6面体形状のワークWを搬送するリニアフィーダ1と、リニアフィーダ1からのワークWが移載されて搬送される搬送テーブル2と、リニアフィーダ1からのワークWを搬送テーブル2上に移載して整列させる移載整列手段21と、搬送テーブル2の下面を帯電してワークWを保持する帯電手段6Aと、ワークWの6面を撮像する撮像手段20とを備えている。移載整列手段21は、リニアフィーダ1と搬送テーブル2との間に位置する無振動部4と、ワークWを整列させる整列ガイド7とを有している。整列ガイド7は平面からみて直線状をなすガイド面7aを含む。
(もっと読む)
組合せ計量装置
【課題】アームと容器とが分離されるときに作用するアームへの突発的負荷を軽減した、組合せ計量装置を提供する。
【解決手段】組合せ計量装置10では、アーム21が、連結ギア243の回転を拘束する機能と連結ギア243を回転させる機能とを含む第1遊星ギア211及び第2遊星ギア212を有している。そして、連結ギア243が拘束されることによって第1遊星ギア211又は第2遊星ギア212の回転力が容器保持部材24をアーム21から押し出す力に変換される。その結果、容器保持部材24がアーム21から容易に開放され、アーム21に作用する突発的負荷が軽減される。
(もっと読む)
物品移載装置
【課題】キャリアに収容された容器を整列状態で搬送する第1コンベヤから、複数の保持手段を備えた移載手段によって容器を保持して第2コンベヤに移載する物品移載装置において、第1コンベヤの容器に欠落があった場合に、ストック部にストックした容器を補給する。
【解決手段】検知手段18によって第1コンベヤ6上の容器4に欠落があったことを検出すると、複数の保持手段のうち、この欠落した位置の容器4を保持する保持手段を特定する。移載手段20を前記ストック部12に移動させ、特定された保持手段に容器4を保持させた後、その他の保持手段には、第1コンベヤ6上の容器取り出し位置Tに停止している容器4を保持させ、全ての保持手段に保持されている容器4を第2コンベヤ10のケース8内に挿入する。
(もっと読む)
ワーク移載装置、ケーサーシステム、およびワーク移載方法
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】フレームに組みつけられたワーク移載装置300であって、チャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に取り付けられ、第一形態から第二形態へワークWの配列を変換するための駆動力を発する動力源と、この動力源に接続された歯車部材と、フレームに少なくとも一部が固定され、第一位置から第二位置への配列変換部20の移動軌跡を規定し、歯車部材に噛み合う歯が形成された歯付き部材と、を備える。
(もっと読む)
1 - 20 / 80
[ Back to top ]