
Fターム[3F081BF06]の内容
コンベア上の物品の姿勢制御 (7,432) | その他の用途、目的 (521) | 物品を収納(箱づめ)、充填するもの (80)
Fターム[3F081BF06]に分類される特許
41 - 60 / 80
物品搬送装置
【課題】グルーピングされる物品以外の圧力を受けずに、物品をグルーピングできる物品搬送装置の提供を目的とする。
【解決手段】複数列に配列され、かつ搬送方向に連続して供給されるペットボトルPBを搬送する供給部2と、供給部2で搬送されるペットボトルPBが順次移送され、所定個数のペットボトルPBの搬送方向の間隔を狭めるとともに、列と直交する方向である行方向に沿って各列のペットボトルPBを整列させるグルーピング部3とを備える。グルーピング部3は、一つのペットボトルPBを載せて搬送する、独立して速度調整が可能な複数の搬送台車LMでペットボトルPBを搬送するので、グルーピングされるペットボトルPBからの圧力さえ受けることなくペットボトルPBをグルーピングできる。
(もっと読む)
グルーピング装置

【解決手段】 グルーピング装置3は、物品1を供給する供給コンベヤ5と、複数の物品1を所定数毎に処理するケーサ6と、一つの物品1を保持する15個のキャリア11と、各キャリア11を磁力により移動させるリニアモータ12と、上記リニアモータ12を制御する制御手段とを備えている。
上記供給コンベヤ5が供給ステーションAで各キャリア11に物品1を供給すると、上記制御手段は上記リニアモータ12を制御して、上記物品1が供給された5つのキャリア11を一体的にグルーピングしてケーサ6に移動させるようになっている。
【効果】 騒音等の発生を抑え、容易に処理手段の処理数の変更に対応することが可能である。
(もっと読む)
容器搬送処理装置
【課題】容器4を前後に分離して処理を行った後、横並びの状態に整列させて搬送する容器搬送処理装置の高速化を可能にする。
【解決手段】3列で容器4を搬送する搬送コンベヤ2と、整列させた3列の容器4のうちの先頭の容器4(4A)を1本ずつ切り離す分離手段6と、搬送コンベヤ2よりも遅い速度で前進し、搬送されている3本の容器4のうち中央の容器4Aに係合して前進を規制する第2ピン34と、そのあとで両側の容器4に係合して前進を規制する第1ピン32とを備えており、これら第1ピン32と第2ピン34とで容器4の前進を規制して前後に離した状態にして、その間に能書差入手段10によって能書50を挿入した後、第2ピン34の係合を外して再び3本の容器4を横並びの状態にして搬送する。
(もっと読む)
搬送処理方法
【課題】物品の箱出しや箱入れをする際に安全性・安定性・作業性・経済性などを確保することのできる搬送処理方法を提供する。
【解決手段】
出入口22が開放保持された箱21を搬送ラインの箱出し操作部41にて上下反転させる。これで箱21外に出た横長姿勢の物品11を出発走行部51から姿勢変換部61まで搬送する。姿勢変換部61では、横長姿勢の物品11を縦長姿勢に姿勢変換し、それを処理作業部71〜73へ搬送して処理する。処理後の物品11を箱入れ操作部81まで搬送し、ここから箱配置部92側へ押し込む。箱配置部92では、押し込まれた縦長姿勢の物品11を開放状態の出入口22より箱21内に受け入れる。その後、物品入りの箱21を箱配置部92外へ搬送する。
(もっと読む)
物品の向き変換装置
【課題】搬送物品の移動中に搬送方向に対する物品の向きを変換できるとともに、柔軟で傷などが付き易い特性の物品においても物品を傷めることなく物品の向きを変換し得る装置を提供する。
【解決手段】無端ベルトの走行により物品33を搬送する搬送コンベヤ3と、該搬送コンベヤ3上の物品33を、その上部を保持して搬送方向に向けて前進移動すると共に所定角度水平回動して該物品33の向きを変換する水平多関節ロボット7と、該水平多関節ロボット7で物品33の向きを変換する位置に対応して無端ベルトの搬送面6aと物品33の下面との間に空気層を形成するエア吹付手段とを備えている。
(もっと読む)
知的製品供給システムおよび方法
【課題】知的製品供給システムを提供する。
【解決手段】知的製品供給システムは、複数の列として形成され各列が投入機構と送出機構の間の処理方向に沿って直列に配置された1以上の搬送モジュールを含む配列であって、搬送モジュールの少なくともいくつかが可変速度搬送モジュールであり、個々の可変速度搬送モジュールが、後続モジュールまたは送出機構へ製品を供給すべく先行モジュールまたは投入機構から製品を受け入れる第1端部から第2端部へ製品を搬送するモジュール搬送機構および製品搬送速度を制御すべくモジュール搬送機構に接続された速度制御要素を含む配列と、製品がどの経路を辿るかを記述する計画を作成し投入機構により配列へ不規則に配送された製品のグループを指定された製品構成に従い向きを揃えて同期的に送出機構へ搬送すべく列の少なくとも1個のモジュールを計画に従い動作させるべく速度制御要素と接続されたプランナとを含む。
(もっと読む)
物品供給装置
【課題】脆い性状の物品の切り出しを不良品を発生させることなく行ない得ると共に、個々の厚みに誤差がある物品の切り出しを確実に行なって供給する。
【解決手段】物品Wを積み重ねて収容するマガジン10の下方に、切り出しコンベヤ12が走行自在に配設される。切り出しコンベヤ12に、物品Wを所定個数単位で切り出す切り出し手段16が配設される。切り出し手段16は、物品搬送方向の後方に向けて下降傾斜する物品載置面30aを形成した複数の支持部材20,22,24,26と、水平な物品載置面34aを形成した支持部材28とを備える。各支持部材22,24,26,28の前端に、最下位の物品Wの後部を引掛けて押し出す押出部32,36が形成される。そして、切り出し手段16がマガジン10の下方を通過することで、物品Wが1個ずつ切り出されて下流側に搬送される。
(もっと読む)
ワーク整列装置
【課題】鉄系素材からなるものであって方向性を有するピン状部材を方向を統一した状態で収納する。
【解決手段】一方の端部91は半球形状の形態を有し、もう一方の端部95は平面形態を有するワーク9を、所定の傾斜角を有した状態で持上げるリフトアップ機構7と、ワーク9を、この状態で下方へとスライド移動させる傾斜路2と、当該傾斜路2と直交するように設けられる水平路1と、当該水平路1に沿って移動するものであって上記傾斜路2上を運ばれて来たワーク9を磁力にて保持して上記水平路1に沿って移動させて所定の位置に収納するキャリア3と、キャリア3の駆動を担うキャリア駆動機構5と、キャリア駆動機構5、キャリア3、リフトアップ機構7の作動制御等を行なう制御手段6と、からなる。
(もっと読む)
ワーク起立装置および扁平容器起立整列装置
【課題】傷を付けるおそれがなく、かつ、その起立、整列が安定したものとなるワークの起立整列装置を提供すること。
【解決手段】垂直面内を周回するチェーン13上に、チェーン13の幅方向に所定の対向間隔をもって、かつ、それぞれがチェーン13の周回方向に平行な軸の周りに回転自在に取り付けられた左右一対のバケット55をチェーン13の長さ方向に多数組と、そのチェーン13の所定の周回区間に、左右一対のバケット55を回転させて、倒れた状態から起立した状態に矯正するガイド棒70とを設け、各左右一対のバケット55は、チェーン13の周回中、ガイド棒70が設けられていない区間では倒れており、ガイド棒70が設けられている区間に進入すると、ガイド棒70によって起立して、ガイド棒70の上流側で左右一対のバケット55の一方に載置された、ワークたる容器100をバケット55の対向面間で挟んで起立、整列させる。
(もっと読む)
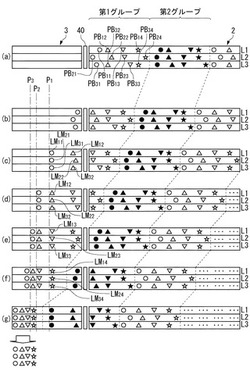
コンベアベルト上を移動する実質的平行六面体対象物の群を形成する方法及び装置
本発明の方法は、2つの連続的な対象物の間にギャップを作り、かつ、前記ギャップの下流に群を形成する1グループの対象物を分離するために、フラップ(10,11)を用いて、その全長上の列を固定することと、コンベアベルト(3)の運転速度Vaより低い長手方向前進速度Vtを有する第1の止め具(39)を上記の通り作られたギャップに挿入することと、前記固定された列をリリースして上記止め具に役割を果たさせることと、前記列の新たな一時的固定化を開始することなどを含む。その方法を実現する装置は、一方では、前記列の2つの連続的な対象物の間にギャップを形成するためにクランプによってその長さ上の列を固定するフラップ(10、11)の形の手段を、他方では、挿入されることで上記の固定列を引き受けることのできる止め具(39)の形の手段を備える。各止め具(39)は、フラップ(10)を動かすためのローラ形状の部材(38)と関連している。フラップ(10)を自動的に戻すために、反応フラップ(11)はばね手段(16)の作用を受ける。  (もっと読む)
(もっと読む)
ガラス瓶、ボトルなどを組分けする方法
本発明は、コンベア(1)上で列をなして到達する製品(2)を収集する方法に関し、前進方向に対して横方向に設けられた収集デバイス(4)を用いる。収集器(4)は、上記供給コンベア(1)の側方に配置された取込ステーション(10)に、収集した製品を配置しかつ切り離し、収集器(4)は、列の上流に向かう長手方向の運動と組み合わされる長手方向の運動、すなわち、製品供給コンベアの長手方向の運動とは反対方向の運動に分けられる。この方法を実行する装置は、コンベア(1)にかつコンベア(1)に沿って設けられたテーブル(3)と、上記コンベア(1)及び上記テーブル(3)の上方における長手方向及び横方向の運動に適した構造体によって搬送される収集器(4)と、を有している。テーブル(3)は、収集した製品をコンベア(1)の縁部においてコンベア(1)の両側に配置しかつ切り離す供給コンベア(1)の両側に延在する2つのパネル(31、32)を有している。 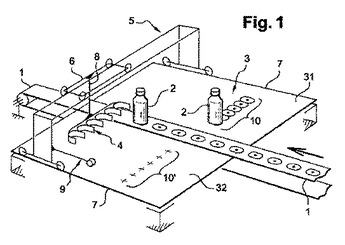 (もっと読む)
(もっと読む)
配合食物プラント製品の出荷装置
【課題】配合食物プラント製品の出荷を無人化しうる衛生的で効率の良い出荷装置を提供する。
【解決手段】筒状の胴と、該胴に固着され該胴の底部開口を覆う底板と、前記胴の上部開口を覆う分離型の上蓋とを有するコンテナ17内の配合食物プラント製品を出荷専用容器に移す出荷装置であって、前記コンテナを保持して反転する第1の手段21〜25と、該反転されたコンテナの上部開口からの排出物を受けて前記出荷専用容器内に落とし込む第2の手段19,20とを有し、かつ、前記第1の手段は、前記第2の手段を倒立支持して前記保持されるコンテナの上部開口に被せ、その状態で反転する。
(もっと読む)
集積装置
【課題】 コンパクトで高速処理が可能であり、高密度に安定して包装物を集積できる集積装置を提供する。
【解決手段】 搬送機構3による包装物1の搬送方向に沿った複数箇所に定ピッチPでプッシャー4a〜4jを配置する。このプッシャー4a〜4jは、エアシリンダ51で搬送面34に対して突出・退入可能とし、かつ水平駆動機構52で搬送方向に同期移動可能に構成する。搬送面上に平置きされた包装物1をプッシャー4a〜4jで押し上げて傾斜姿勢に変換した後、プッシャーを搬送方向に同期移動させて前記ピッチPを縮小し、包装物1を集積する。
(もっと読む)
物品搬送装置及び物品搬送方法
【課題】固化していない軟弱な物品を固化装置の内部に滞留させることが可能で、しかも、製品乗せ台のような剛性を有する容器を必要としない物品搬送装置を提供する。
【解決手段】固化していない状態で供給される複数の物品100のそれぞれを冷却装置11の入口から出口まで搬送単位110ずつ搬送方向に隙間が空いた状態でコンベア20により順次搬送する。コンベアによる物品の搬送経路にストッパー21aを突出させて冷却装置11からの物品100の搬出を阻止する拘束状態と、ストッパー21aを搬送経路から退避させて冷却装置11からの物品100の搬出を許容する解除状態とを切換え可能とし、かつ、拘束状態におけるコンベア20の搬送速度V2を、冷却装置11に搬入される物品100のそれぞれがストッパー21aによって拘束されるまでは搬送単位110間に隙間G2が残る範囲で、解除状態における搬送速度よりも低下させる。
(もっと読む)
PTPシートの搬送機構および排出装置
【課題】搬送ラインにおけるPTPシート18の列の乱れを防止できる、搬送機構および排出装置を提供する。
【解決手段】排出装置を構成する搬送機構12では、第1搬送部56aから第2搬送部56bへPTPシート18が移載される際に、上流側の押進速度V1が下流側の押進速度V2よりも遅くなるように第1押進手段60aが制御される。つまり、PTPシート18を渡す側の押進速度V1が受け取る側の押進速度V2よりも遅くなるように第1押進手段60aが制御される。したがって、第1搬送部56aから第2搬送部56bへPTPシート18が移載されると、第1搬送部56aからPTPシート18が直ちに引き離され、その後の第1搬送部56aの動きによってPTPシート18の列が乱されることはない。また、下流側の押進速度V2を速くする必要がないので、第2押進手段60bを構成する第2押進部材66bの取り付けピッチを長くする必要はなく、下流側のライン長が不所望に長くなるのを防止できる。
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
整列コンベア用供給装置及びその運転方法、並びに箱詰め装置。
【課題】無端軌道に載っている物品の回転角度を正確に判断することができ、かつ正確な回転角度の判断を比較的低コストで実現できる整列コンベア用供給装置の運転方法、及びその運転方法を利用した整列コンベア用供給装置及び箱詰め装置を提供する。
【解決手段】本発明の整列コンベア用供給装置の運転方法は、無端軌道204と、無端軌道204の上方に配設された二次元コード読み取り装置202と、二次元コード読み取り装置202と通信可能に構成された制御装置30と、を有し、二次元コード読み取り装置202が無端軌道204によって搬送される物品Wの上面に表示されている二次元コードQの読み取り角度を取得する角度取得ステップと、制御装置30が読み取り角度を二次元コード読み取り装置202から取得して読み取り角度に基づいて物品Wの回転角度を算出する回転角度算出ステップと、を有する。
(もっと読む)
集積装置およびこれを備えた箱詰め装置
【課題】1台の装置内において、複数の集積パターンによって物品の集積を効率よく行うことが可能な集積装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1では、搬送装置10から搬送されてくる商品X1,X2を、互いに並列に配置された2つの集積処理部(搬送機構30および吸着搬送機構40)において、異なる集積パターンによって集積処理を行う。そして、搬送機構30と吸着搬送機構40とにおいてそれぞれ集積処理された商品X1,X2を、共通の排出位置である排出装置50の2Fの階層部分から下流側に配置されたフラップ開口装置60の方へ排出する。
(もっと読む)
搬送システム
【課題】搬送効率の向上及び処理における無駄時間の減少を図ることが可能な搬送システムを提供すること。
【解決手段】
所定の搬送方向Aに互いに並んだ製品ユニット2を搬送する搬送システムであって、前記製品ユニット2に作用し、かつ、少なくとも1つの駆動要素6によって前記搬送方向Aへ駆動される複数の係合部材7を備えて成る前記搬送システムにおいて、前記係合部材7を、これが前記製品ユニット2に作用する際、各係合部材間の間隔を調整するために動作状態と非動作状態の間で切換可能に構成した。 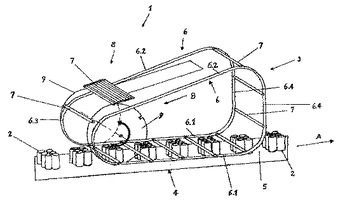 (もっと読む)
(もっと読む)
集積装置
【課題】物品のサイズに応じて搬送手段の長さが変化することにより、物品のサイズの大小に拘わらず、物品の姿勢が不安定になることなく姿勢変更手段に渡すことができる集積装置を提供する。
【解決手段】物品Mを水平姿勢で第1の方向Xに搬送する搬送手段10と、物品Mを受け取って、物品Mの側面が第1の方向Xおよび鉛直方向に沿った起立姿勢に姿勢を変更させる姿勢変更手段20と、物品Mを第1の方向Xに直交する第2の方向に重ねた整列状態となるように集合させる整列手段40とを備え、搬送手段10が第1の方向Xに伸縮可能で、搬送される物品Mの第1の方向Xの長さに応じて搬送手段10が伸縮して搬送手段10と姿勢変更手段20との間の空間の距離を変更可能であることを特徴とする。
(もっと読む)
41 - 60 / 80
[ Back to top ]