
Fターム[3F204AA02]の内容
クレーンの細部(制御、安全) (2,955) | クレーン又は作業機の種類 (502) | クレーン (444) | 天井走行クレーン (100)
Fターム[3F204AA02]に分類される特許
1 - 20 / 100
天井クレーン及び天井クレーンの改修方法
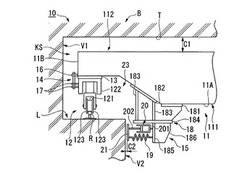
【課題】天井面とのクリアランスに制限を受けることなく、地震発生時にクレーン本体に作用する荷重を低減する免震手段が組み込まれた天井クレーンを提供する。
【解決手段】本発明に係る天井クレーン10は、建屋B内の天井面Tの下方に配されたクレーン本体11と、クレーン本体11を支持し、レールR上を走行可能な走行部12と、レールRの延設方向と直交する横方向への相対移動を可能に走行部12とクレーン本体11とを連結するスライド機構13と、走行部12とクレーン本体11との相対移動を拘束するとともに、地震時には許容するトリガ機構14と、クレーン本体11に、横方向に対向する建屋B内の第二垂直壁面V2との間に隙間C2を有して取り付けられ、コイルスプリング19及びオイルダンパ20を有する復元・減衰機構15と、を備えることを特徴とする。
(もっと読む)
天井クレーン及び天井クレーンの改修方法

【課題】天井面とのクリアランスに制限を受けることなく、地震発生時にクレーン本体に作用する荷重を低減する免震手段が組み込まれた天井クレーンを提供する。
【解決手段】本発明に係る天井クレーン10は、建屋B内の天井面Tの下方に配されたクレーン本体11と、クレーン本体11を支持し、レールR上を走行可能な走行部12と、レールRの延設方向と直交する横方向への相対移動を可能に走行部12とクレーン本体11とを連結するスライド機構13と、走行部12とクレーン本体11との相対移動を拘束するとともに、地震時には許容するトリガ機構14と、クレーン本体11に、横方向に対向する建屋B内の第二垂直壁面V2との間に取り付けられ、コイルスプリング19及びオイルダンパ20を有する復元・減衰機構15と、レールRの延設方向で第二垂直壁面V2を転動可能な転動部22と、を備えることを特徴とする。
(もっと読む)
物品搬送装置
【課題】回生電力を蓄電手段に蓄電する回路構成を簡素化して低コストで物品搬送装置を製造でき、かつ回生電力の回収時にエネルギーの損失を低減できる物品搬送装置を提供すること。
【解決手段】台車ユニット4は、台車ユニット4を走行させる走行駆動手段17と、走行駆動手段17に電力を供給する走行用蓄電手段5と、搬送物支持部材12を昇降させる昇降駆動手段30と、を有し、電源手段6が、走行用蓄電手段5と昇降駆動手段30とに分岐される電力線55を介して接続され、電力線55の走行用蓄電手段5に接続される分岐線55’に整流器53が設けられ、整流器53によって、走行用蓄電手段5に向かって一方向に直流電流が流されるとともに、昇降駆動手段30から発生する回生電力E’が走行用蓄電手段5に向かって流されるようになっている。
(もっと読む)
クレーン軌道異常検出システム、クレーン軌道異常検出方法、及びコンピュータプログラム
【課題】 天井クレーンの軌道に異常があるかどうかを、可及的に少ない部品数で且つ簡単な処理で、自動的、定量的、且つ早期に検出する。
【解決手段】 天井クレーン100のサドル130a、130bに、天井クレーン100の走行方向(x軸)と、天井クレーン100のサドル130の横行方向(y軸)と、天井クレーン100の高さ方向(z軸)のそれぞれの加速度値を検出する3軸加速度センサ150a、150bを取り付ける。この3軸加速度センサ150a、150bから、天井クレーン100の走行方向及び高さ方向の加速度を取り込み、走行方向の加速度値を使って天井クレーン100の走行方向の現在位置を導出すると共に、高さ方向の加速度値を使って軌道210の異常の有無を検出する。そして、異常のあった場所をコンピュータ画面に表示したり、軌道210に異常があったことをブザーやランプで報知したりする。
(もっと読む)
クレーンの振れ止め制御方法及び振れ止め制御装置
【課題】吊り荷を支持するロープ長が変化する場合でも、比較的簡単な演算により所定の速度パターンを生成して吊り荷の振れ止めを行う。トロリーの目標位置と移動量との位置偏差が減速開始距離に等しくなった時点からトロリーの減速を開始し、高精度な位置決めを可能にする。
【解決手段】トロリーが移動する際の吊り荷の振れ角に関する運動方程式に基づいてトロリーの加減速時の速度パターンを求め、この速度パターンに従ってトロリーを駆動することにより吊り荷の振れ止めを行う制御方法に関する。前記運動方程式をトロリー加速度について解くことにより数式2に示す加減速度を求め、この加減速度に応じた速度パターンに従ってトロリーを駆動し、トロリーの加減速が終了した時点の吊り荷の振れ角が零となるように制御する。
(もっと読む)
クレーン振れ角検出方法及び装置、並びにクレーン振れ止め制御方法及び装置
【課題】振れ角検出器及び複雑な演算が不要で安価にクレーンの振れ角を検出し、各種パラメータ調整が容易で高精度に振れ止め制御を行う。
【解決手段】クレーン制御装置は、トロリーを駆動する走行モータの駆動力を制御装置に入力し、制御装置が所定の状態方程式から求められたオブザーバに基づいて、ロープの振れ速度推定値、振れ位置推定値及び外乱推定値を求める。制御装置が走行モータの速度操作指令信号を出力し、レギュレータにより速度操作指令信号からトロリーの速度、振れ速度推定値及び振れ位置推定値をそれぞれ調整した値を減算することによりトロリーの目標駆動力を求め、これを走行モータのトルク操作指令信号に変換すると共に、この信号から、外乱推定値から求められたトルク成分をキャンセルして走行モータのトルク指令信号を算出しこれによって走行モータをトルク制御する。
(もっと読む)
置場管理システム
【課題】簡素な構成によって形鋼製品の置場を容易、且つ、正確に管理すること。
【解決手段】作業者側端末装置13が、形鋼製品1に付与されている形鋼側バーコード5の製品IDと形鋼製品1が収容されているラック4a〜4dに付与されているラック側バーコード6a〜6dの置場IDとを読み取り、読み取られた製品IDと置場IDとを管理サーバ装置30に送信し、管理サーバ装置30が、受信した製品IDと置場IDとを置場管理マスタに自動登録する。これにより、簡素な構成によって形鋼製品1の置場を容易、且つ、正確に管理することができる。
(もっと読む)
移載システム
【課題】横移載時にも被搬送物を載置台の所定位置に移載する。
【解決手段】移載システム(100)は、天井に敷設された軌道(1)に沿って走行しつつ被搬送物(3)を搬送する搬送車(2)と、軌道より下方に設けられる載置台(4)との間で被搬送物が横移載方式で移載可能である。移載システムは、(i)搬送車に把持される被搬送物を載置台の所定位置に載置する載置動作を行う際の被搬送物の移載位置を表す載置位置情報、及び(ii)載置台上の被搬送物を搬送車が把持する把持動作を行う際の被搬送物の移載位置を表す把持位置情報を記憶する記憶手段(101)と、載置動作を行う場合、載置位置情報の移載位置で移載が行われるように、他方、把持動作を行う場合、把持位置情報の移載位置で移載が行われるように搬送車を制御する制御手段(102)とを備える。
(もっと読む)
地切り停止機構付き電動巻上機
【課題】特別な装置を用いることなく、精度の良い荷重情報により地切り停止できる巻上機を提供する。
【解決手段】電動機と、電動機を駆動させることによりワイヤロープの巻き上げ、又は巻き下げ動作を行う、電動巻上装置において、巻上動作を検出する巻上動作検出手段と、モータの回転数を検出する回転数検出手段と、前に検出されたモータ回転数と新しく検出されたモータ回転数を比較する回転数比較手段と、電流値を検出する電流値検出手段と、電流検出手段により検出された電流地のうち、既に検出された電流値と既に検出された電流値の後に検出された電流値を比較する電流値比較手段と、を備え、回転数比較手段と電流地比較手段の検出結果を用いて地切りであると判定可能とする。
(もっと読む)
クレーンの振れ止め制御装置
【課題】二重振り子構造、単振り子構造を含むクレーン搬送システムにおいて、速度パターンを持たずに、吊り荷の振れ止めを高精度に実現可能としたクレーンの振れ止め制御装置を提供する。
【解決手段】吊り荷及びその支持構造が単振り子構造または多重振り子構造を構成し、クレーン本体の台車を駆動して吊り荷を目標位置まで搬送するクレーン搬送システムにおいて、吊り荷503の振動による振れ角度を検出する振れ角センサ512と、吊り荷の速度検出値及び位置検出値をフィードバックして吊り荷を目標位置まで搬送するための第1の操作量を演算し、かつ、前記振れ角度を無線通信によりフィードバックして吊り荷の振れ止めを行うための第2の操作量を演算する演算制御手段としてのアシスト制御部101と、第1の操作量及び第2の操作量を加算して前記台車に与える手段と、を備える。
(もっと読む)
床上操作式天井クレーン用感電防止装置
【課題】操作ボックスに給電される電圧を低くして、クレーン取扱者の感電事故を確実に防止できる床上操作式天井クレーン用感電防止装置を提供する。
【解決手段】天井クレーンは、ホイストに多数のコードが束ねられたケーブルが垂下した状態で取り付けられており、その下端には操作ボックス35が取り付けられている。操作ボックス35には電源入・切スイッチ36a,36b等が配設されている。ガーダの左端側上面に載置された感電防止装置44は、1つの200v/24v降圧トランス45と、8つの24v/200v昇圧トランス46a〜46hとを設けており、降圧トランス45は、動力電源48と電源入・切スイッチ36a,36bに接続されている。操作ボックス35の上昇・下降スイッチ37a,37b等は昇圧トランス46a〜46hに接続されている。これにより、操作ボックス35には降圧された低電圧が加えられるようになっている。
(もっと読む)
画像生成システム
【課題】フックの周辺を鉛直斜め上方から見下ろしながらクレーンを操作する操作者に対して有益な画像情報を提示できる画像生成システムを提供すること。
【解決手段】画像生成システムは、天井クレーンに取り付けられて隣の天井クレーンを撮像するカメラであり、天井クレーンの走行方向に平行に延びる光軸を有するカメラと、その光軸に平行な方向に天井クレーンと共に移動するマークに含まれる対象点のその光軸に垂直な平面におけるその光軸までの固定距離と、天井クレーンから天井クレーンまでのクレーン間距離が所定値となるときにカメラが撮像する画像におけるその固定距離の画像上の大きさとに基づいて、カメラが撮像した画像上に複数のクレーン間距離を示す目盛りを描画する目盛り描画手段とを備える。
(もっと読む)
スラブ搬送装置
【課題】熱間圧延スラブをクレーンで搬送するスラブ搬送装置として、熱間圧延スラブの垂れによる他の設備との接触を適切に防止することができるスラブ搬送装置を提供する。
【解決手段】熱間圧延スラブ2をクレーン10で搬送するスラブ搬送装置であって、搬送する熱間圧延スラブ2の垂れを検知する垂れ検知センサー11を備えている。
(もっと読む)
操作装置及びその操作装置を備える移動装置
【課題】操作装置の操作者が扱いやすく、又はコンパクトに形成することができると共に、精度よく操作指示を出すことができ、物体の移動に用いられる駆動装置の動作を手元で容易に確認できる操作装置及びその操作装置を備える移動装置を提供する。
【解決手段】第1の筐体20と第2の筐体30との間の相対的回動の回動量又は回動方向を変更することにより、物体の移動に利用される駆動装置の動作を指示する操作装置であって、前記第1の筐体及び前記第2の筐体には、前記相対的回動の回動量又は回動方向に関する情報を操作者が目視できる態様で標示する標示部を備えており、さらに、前記第1の筺体を操作者が保持した時操作者の側とは反対側に位置する前記第1の筺体及び/又は前記第2の筺体の面に、操作者により指示された前記駆動装置の動作の方向を報知するための報知部を備える。
(もっと読む)
クレーンの高さ検出装置及び検出方法
【課題】簡易な構成で鉛直方向も含めたクレーン位置を正確に測定でき、かつ可動部である台車に高さ検出装置のための電気配線等を敷設する必要のないクレーンの高さ検出装置及び検出方法を提供する。
【解決手段】クレーン本体12に配置されたワイヤ式エンコーダ40は、エンコーダ本体42と、エンコーダ本体42から所定長さ引き出し可能な測定ワイヤ44とを有し、エンコーダ本体42から引き出された測定ワイヤ44は、台車14の移動方向に平行に延び、台車14に設けられた滑車46によって鉛直方向に変向させられ、台車14の下方に懸吊されたクレーンフック18に取り付けられる。
(もっと読む)
倉庫内で物体を移動するためのシステム
【課題】閉じられた空間に位置される物体を移動するためのシステムを提供する。
【解決手段】希望する位置に前記物体を把握しそして方向付けるために適用される少なくとも1つの遠隔操縦機3および実質的に水平である少なくとも2つの異なる方向に前記閉じられた空間で前記遠隔操縦機を移動するために適用される少なくとも1つの頭上走行クレーン機構2を含む。操作者によって制御される電子処理ユニットは頭上走行クレーン機構および遠隔操縦機の移動を電子的にそして自動的に決定することが可能である。
(もっと読む)
コイル多段積み方法
【課題】安全なコイルの段積み方法
【解決手段】コイルを多段積み方法において、その上段に載置するコイルと、該上段コイルと接触し、既にスキッドに載置されている2つの下段コイルにおけるコイルとスキッドあるいはコイル同士の接触点において発生する抗力がゼロ以上コイル耐荷重未満で、且つ、下段コイルの重心周りのモーメント力がつり合っている時にのみ上段コイルの載置を行うことにより段積みの際の荷崩れを発生させないようにしたことを特徴とするコイル多段積み方法。
(もっと読む)
天井クレーンの巻上駆動装置
【課題】複数台の電動機のうち一部が故障した場合非常運転を行える天井クレーンの巻上駆動装置を提供する。
【解決手段】レードルクレーンに備えている1台の巻上ドラム7に対して、複数台の高圧電動機6と、各複数台高圧電動機6に付設された同数台の高圧マトリクスコンバータ20からなる巻上駆動装置を備えており、高圧電動機6が、基底回転数以下の領域でトルクが一定値の定トルク領域と、基底回転数以上の領域であってトルクが回転数に反比例して低減する定出力領域とからなる特性を有するものであって、高圧マトリクスコンバータ20は、複数台の高圧電動機6で通常運転するときは、各高圧電動機6を定出力領域で運転させ、複数台より少ない台数の高圧電動機6で非常運転するときは、その高圧電動機6を基底回転数以上で通常運転の回転数より小さくかつ通常運転の半分でない回転数で運転させる。
(もっと読む)
鍛造クレーンシステム
【課題】複数の鍛造クレーンによって被鍛造物を安定的に搬送することが可能な鍛造クレーンシステムを提供する。
【解決手段】鍛造クレーンシステム100は、被鍛造物を吊下げる吊下げ手段、並びに、駆動源としての電動機23、電動機23を制御するインバータ25、及び電動機23の回転状態を検出してインバータ25に出力する回転状態検出部24を具備して自走するための走行手段20をそれぞれ有する複数の鍛造クレーン1と、これら複数の鍛造クレーン1のそれぞれのインバータ25に対して、同一の走行速度指令を出力可能な操作部10とを備え、インバータ25は、回転状態検出部24から出力される検出信号に基づいて、走行速度指令に応じた回転速度で駆動するように電動機23に対して交流電流を出力する。
(もっと読む)
搬送補助装置
【課題】作業者の搬送時の負担を軽減すると共に、正確な位置決めをなし得る搬送補助装置を提供する。
【解決手段】搬送補助装置30は、搬送物Mを吊り下げ保持する懸吊手段38と、操作情報を検知する力覚センサ62と、搬送物Mの荷重を検知する荷重センサ70とを備える。懸吊手段38は、走行手段36を介してX軸,Y軸サーボモータ40,42によりX−Y軸方向へ移動される。また、懸吊手段38は、Z軸サーボモータ44によって搬送物MをZ軸方向へ移動させる。更に、各サーボモータ40,42,44には、夫々エンコーダが設けられる。制御手段は、搬送物Mの荷重に基づいて懸吊手段38が搬送物Mを吊り下げ保持するようZ軸サーボモータ44を制御する。更に、制御手段は、力覚センサ62からの操作情報とエンコーダが出力したパルスとを比較演算して、各サーボモータ40,42,44を、夫々フィードバック制御する。
(もっと読む)
1 - 20 / 100
[ Back to top ]