
Fターム[3F204GA04]の内容
クレーンの細部(制御、安全) (2,955) | その他の制御、検出、表示 (217) | 検出 (52)
Fターム[3F204GA04]に分類される特許
1 - 20 / 52
作業車の制御装置
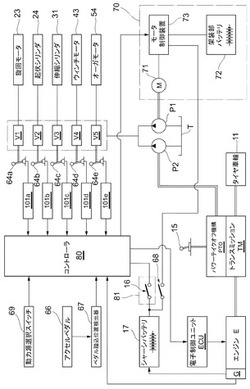
【課題】作業車から発生する騒音を小さく抑えつつ、必要に応じて多量の作動油を油圧アクチュエータに供給できる作業車の制御装置を提供する。
【解決手段】穴掘建柱車は、電動モータ71およびエンジンEと、操作レバー64と、制御バルブVと、レバー操作位置検出器101と、アクセルペダル66と、ペダル踏込位置検出器67と、コントローラ80とを備え、コントローラ80は、操作レバー64の操作量が第1の所定操作量未満であるときにはアクセルペダル66の操作量に拘わらず電動モータ71を所定回転速度で回転させ、操作レバー64の操作量が第1の所定操作量以上である状態でアクセルペダル66が操作されたときにはアクセルペダル66の操作量に応じて電動モータ71の回転を制御し、操作レバー64の操作量が第1の所定操作量以上である状態でアクセルペダル66が第2の所定操作量を越えて操作されたときにはエンジンEを追加して駆動させる。
(もっと読む)
岸壁クレーン

【課題】
大規模地震(例えばレベル2地震動)が発生した場合であっても、岸壁クレーンが転倒する事故、及び走行装置が破壊される事故等を抑制することができる岸壁クレーンを提供する。
【解決手段】
岸壁クレーン1が、クラッシャブルエリア4と、クラッシャブルエリア4の上方に上端を設置した補助脚5を有しており、クラッシャブルエリア4が、支持ピン57と、鉛直方向を長手方向とし支持ピン57を連通した長穴11と、支持ピン57を長穴11の下方に固定し且つ岸壁クレーン1の重量を支持する固定プレート10を有しており、地震発生時に、固定プレート10による固定が解除され、支持ピン57が長穴11に沿って上方に移動し、クラッシャブルエリア4が鉛直方向に短くなり、補助脚5の下端が岸壁40に接地して岸壁クレーン1を支持する構成を有する。
(もっと読む)
岸壁クレーン
【課題】
大規模地震(例えばレベル2地震動)が発生した場合であっても、岸壁クレーンが転倒する事故、及び走行装置が破壊される事故等を抑制することができる岸壁クレーンを提供する。
【解決手段】
岸壁クレーン1が、走行装置2の側方に設置した補助脚4と、補助脚4の下方であり岸壁40の上方となる位置に配置した摺動盤5と、摺動盤5を岸壁クレーン1と連結する連結装置24を有しており、地震発生時に、補助脚4が摺動盤5を介して岸壁40に接地して岸壁クレーン1を持上げ、連結装置24が岸壁クレーン1と摺動盤5の連結を解除するように構成した。
(もっと読む)
クレーン用アクセル開度変換装置
【課題】アクセル開度を変換することによりクレーンの燃費を低減するクレーン用アクセル開度変換装置を提供する。
【解決手段】アクセルペダルから入力されるアクセル入力開度と、エンジンコントロールユニットに出力するアクセル出力開度との関係を定めるアクセル開度特性を記憶する記憶手段30と、アクセル開度特性に従って、アクセル入力開度をアクセル出力開度に変換する変換手段20と備える。オペレータがアクセルペダルを踏みすぎても、エンジン回転数を低くすることができ、クレーンの燃費を低減できる。
(もっと読む)
クレーン
【課題】アタッチメントが安全な状態のときにエンジンの自動停止を行う。
【解決手段】コントローラ75(エンジン制御手段)は、複数のアクチュエータ60がいずれも動いていないことをセンサ71(アクチュエータ作動検出手段)が検出している状態が所定時間継続し(ステップS2及びS3)、かつ、荷重検出手段72が検出した荷重がアタッチメント30の自重より小さい場合に(ステップS4)、エンジン51を停止させる(ステップS5)。
(もっと読む)
確認装置
【課題】検知装置で検知した対象物の状態に基づいて確認作業を行うことが可能な確認装置を提供すること。
【解決手段】対象物100の状態を確認者110に確認させる確認装置1は、対象物100の状態を検知する検知装置3と、検知装置3により検知された対象物100の状態を少なくとも確認者110に報知する報知装置11,28と、対象物100の状態の確認を入力する入力装置12と、検知装置3により検知された対象物100の状態を判断し、対象物の状態が正常である場合であって、入力装置12による入力があった場合に、報知装置11,28により確認の終了を報知させる制御部21と、を備える構成とする。
(もっと読む)
鍛造クレーンシステム
【課題】複数の鍛造クレーンによって被鍛造物を安定的に搬送することが可能な鍛造クレーンシステムを提供する。
【解決手段】鍛造クレーンシステム100は、被鍛造物を吊下げる吊下げ手段、並びに、駆動源としての電動機23、電動機23を制御するインバータ25、及び電動機23の回転状態を検出してインバータ25に出力する回転状態検出部24を具備して自走するための走行手段20をそれぞれ有する複数の鍛造クレーン1と、これら複数の鍛造クレーン1のそれぞれのインバータ25に対して、同一の走行速度指令を出力可能な操作部10とを備え、インバータ25は、回転状態検出部24から出力される検出信号に基づいて、走行速度指令に応じた回転速度で駆動するように電動機23に対して交流電流を出力する。
(もっと読む)
搬送補助装置
【課題】作業者の搬送時の負担を軽減すると共に、正確な位置決めをなし得る搬送補助装置を提供する。
【解決手段】搬送補助装置30は、搬送物Mを吊り下げ保持する懸吊手段38と、操作情報を検知する力覚センサ62と、搬送物Mの荷重を検知する荷重センサ70とを備える。懸吊手段38は、走行手段36を介してX軸,Y軸サーボモータ40,42によりX−Y軸方向へ移動される。また、懸吊手段38は、Z軸サーボモータ44によって搬送物MをZ軸方向へ移動させる。更に、各サーボモータ40,42,44には、夫々エンコーダが設けられる。制御手段は、搬送物Mの荷重に基づいて懸吊手段38が搬送物Mを吊り下げ保持するようZ軸サーボモータ44を制御する。更に、制御手段は、力覚センサ62からの操作情報とエンコーダが出力したパルスとを比較演算して、各サーボモータ40,42,44を、夫々フィードバック制御する。
(もっと読む)
接近警報装置
【課題】 あらゆる保線現場で、クレーンのブーム先端が高圧架空線から常に一定の距離に接近したことを検知できるように対応し得る接近警報装置を提供する。
【解決手段】 高圧架空線40が発する電界を検知し、高圧架空線40からの距離に比例する電界強度をA/D変換した値を無線送信する充電検知器1と、充電検知器1から無線送信された電界強度のA/D変換値を受信する警報器21とからなり、警報器21は、充電検知器1を高圧架空線40から所望の距離に配置した時に受信したA/D変換値に基づいて警報開始を設定可能とする。
(もっと読む)
クレーン装置の制御方法
【課題】いわゆるダブルフック型の天井走行クレーン装置を用いて吊荷を傾斜させたときの落下事故を防止することが可能な制御方法を提供する。
【解決手段】本発明は、クレーン本体1と、クレーン本体に載置された一対の台車2A,2Bと、各台車にそれぞれ取り付けられた一対のフック3A,3Bとを備え、各フックが互いに連動して昇降可能な第1の状態と、前記各フックが独立して昇降可能な第2の状態とを切り替え可能とされたクレーン装置100を制御する方法である。本発明は、一対のフック間距離と各フックの高さとを検出するステップと、検出した一対のフック間距離及び各フックの高さに基づいて、一対のフックで吊持する吊荷の傾斜角度を算出するステップと、算出した吊荷の傾斜角度が、予め設定した吊荷の安定限界角度に到達した場合には、各フックの昇降動作を強制的に停止させるステップとを含む。
(もっと読む)
車輪駆動制御装置及び車輪駆動制御方法ならびにそのプログラム
【課題】複雑な構成を用いずに、トロリの車輪の空転を軽減することのできる車輪駆動制御装置を提供する。
【解決手段】巻上部23の吊荷5の荷重を検出し、クレーン装置1の加速時のトルクの制限値を、当該トルクの制限値の最大値に達するまで、吊荷5の荷重に応じて増加させて、荷重に応じたトルクの制限値を決定する。また、クレーン装置1の減速時のトルクの制限値を、当該トルクの制限値の最小値に達するまで、吊荷5の荷重に応じて減少させて、荷重に応じたトルクの制限値を決定する。
(もっと読む)
積荷搬送機械における荷重サイクル自動検出システム、および方法、ならびに搬送機械
【課題】
荷重サイクル、および/または積荷吊り下げ手段の重量を高い信頼性で認識させる。
【解決手段】
積荷搬送機械の荷重サイクル自動検出システムは、少なくとも引き上げ力計測装置の出力信号に基づいて荷重変化を自動検出するための荷重変化検出と、少なくとも水平方向の積荷の位置を検出する積荷位置検出と、荷重サイクル自動検出のための荷重サイクル検出とを備え、上記荷重サイクル検出は、少なくとも荷重変化検出、および荷重位置検出の出力信号に基づいて行われるとともに、上記荷重サイクル検出は、正の荷重変化が認識されたときに、積荷の位置を積荷ピックアップポイントとして検出し、積荷が、あらかじめ決定された距離だけ積荷ピックアップポイントから水平に移動したかどうかの判定に基づいて、上記正の荷重変化を新たな荷重サイクルの開始として評価する。
(もっと読む)
旋回素子を備える作業装置の高さを決定するための方法および制御装置
本発明は、旋回素子を備える作業装置の可変の作業高さを決定するための方法であって、作業高さを得るために作業装置(1)の旋回素子(2)による線形運動が行われる方法に関する。粗野な環境条件においても作業高さの決定時に正確な結果を得るために、旋回素子(2)が進んだ高低差(Δh)から得られる差圧(Δp)を決定することにより作業高さの検出を行う。 (もっと読む)
クレーンの転倒防止装置
【課題】オペレータの操作に依存せず、反力値に応じてクレーンを減速、停止させつつも、クレーンの転倒を確実に防止することのできるクレーンの転倒防止装置を提供する。
【解決手段】このクレーンの転倒防止装置は、アウトリガに付設されてその反力値を出力可能な反力検出器と、クレーンを制御するコントローラとを備えており、コントローラは、反力検出器からの反力値を読み込み、その反力値の大きさに応じて、反力値が小さいときには大きいときに比べてコントロールバルブのスプール移動量を少なくしてクレーン速度を無段階で減速させる。
(もっと読む)
シャトルブーム式コンテナクレーンの耐震機構
【課題】シャトルブーム式コンテナクレーンの耐震性能を的確に向上させることができるシャトルブーム式コンテナクレーンの耐震機構(免震機構・制振機構)を提供する。
【解決手段】常時は、所定の停止位置に位置した時にブレーキ28によって拘束・固定されているシャトルブーム12について、地震発生時に、そのブレーキ28を解除して、シャトルブーム12自体を免震要素・制振要素(免震質量・制振質量)として機能させる。
(もっと読む)
岸壁クレーン
【課題】コンテナクレーンのトラバーサの上にコンテナが載っているかどうかを表示することで、トロリーの運転者に安全かつ能率的な荷役操作を行なう装置を提供することを目的とする。
【解決手段】ブーム上に海側と陸側にトロリーとコンテナを載せて横搬送するトラバーサを設けた岸壁クレーンであって、トラバーサにコンテナの着床の有無を検出し、トロリーの運転室より確認できるように構成したコンテナの着床表示装置を設けた岸壁クレーン。
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
クレーン装置
【課題】 巻上げ機から垂下された可撓性の吊下げ部材に掛止した荷物を、作業者が水平方向へ押して生じた変位の発生により走行を始動し、吊下げ部材の振れの回転中心が荷物の着地の真上位置とは異なることにより生じる変位を、二次元内で往復動させて縮小し、変位の大きさに比例して走行速度が増減するように構成されたクレーン装置において、下降する荷物が円滑に着地することが可能なようになする。
【解決手段】 作業者が吊下げ部材の巻上げだけの指令を入力するための操作ペンダントと、吊下げ部材3に作用する下向きの力を測定する力測定手段と、操作ペンダントからの入力および力測定手段の測定値に基づき荷物の重量を算出して記憶する荷物重量の算出記憶手段と、荷物重量の算出記憶手段の荷物重量データおよび力測定手段の測定値に基づき作業者の上下方向の操作力を算出する操作力算出手段と、操作力算出手段の算出値に対応した電力を巻上げ機の電動機に供給する電力供給手段と、を具備したことを特徴とする。
(もっと読む)
クレーン装置およびクレーン装置の制御方法
【課題】荷役作業を、比較的低い燃費、かつ比較的低い排出ガス量で実施することができるクレーン装置、およびクレーン装置の制御方法を提供することを目的とする。
【解決手段】クレーン機構が行う荷役動作においてクレーン機構が受ける現在の負荷の大きさを表す負荷量情報、および充電器の現在の充電量を表す充電量情報を少なくとも取得し、負荷量情報と充電量情報とに応じて、発電機構のエンジンの動作状態と放充電機構の放充電状態とを少なくとも制御することで、クレーン機構が受け取る電力を調整する制御する際、荷物固定具の現在の高さを表す高さ情報と、荷物固定具に固定されている現在の荷物の重量を表す重量情報との少なくともいずれか一方を取得し、取得した高さ情報および重量情報の少なくともいずれか一方に基いて充電量閾値を設定する。さらに、取得した充電量情報と予め設定された充電量閾値とをそれぞれ比較し、この比較結果に応じて、放充電機構の放充電状態を少なくとも制御する。
(もっと読む)
バケット警報装置
【課題】バケットの吊り上げ移動時における作業員の安全性を向上させることが可能なバケット警報装置を提供することを目的とする。
【解決手段】クレーン等の建設機械によって吊り上げられるバケット10に設けられており、このバケット10が吊り上げられた際の地面Gまでの高さを検出する高さ検出装置1と、この高さ検出装置1に連動し、前記バケット10が所定の吊り上げ高さとなった際に警報を発する警報機2とを備えるバケット警報装置。このようなバケット警報装置によれば、上空を移動するバケット自体から警報が発せられることとなるので、バケットの通過ルート上で作業する作業員に警報が聞こえやすくなるとともに、作業員が上空に気を配ることができる。
(もっと読む)
1 - 20 / 52
[ Back to top ]