
Fターム[4F035BB02]の内容
噴霧制御装置 (2,732) | 放出制御用検出装置 (234) | 対象物又はその周囲の状態を検出するもの (168) | 位置又は形状の検出 (117)
Fターム[4F035BB02]の下位に属するFターム
放出前の予知的検出 (23)
放出時の検出 (11)
一次元的検出 (2)
二次元的又は多次元的検出 (9)
光を検出手段とするもの (12)
超音波を検出手段とするもの (3)
その他の検出手段を用いるもの (11)
Fターム[4F035BB02]に分類される特許
21 - 40 / 46
棒鋼材の識別表示装置
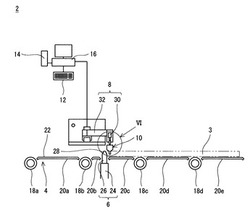
【課題】安全性に優れ効率の良い、棒鋼材の識別表示装置の提供。
【解決手段】この識別表示装置2は、棒鋼材3を搬送する搬送部4と、棒鋼材3を位置決めする位置決め部6と、棒鋼材3に識別表示をする印字部8とを備えている。印字部8は、耐熱塗料を噴射するスプレーガン30を備えている。この識別表示装置2は、このスプレーガン30により識別表示がされるように構成されている。好ましくは、この識別表示装置2は、冷却部10を備えている。この冷却部10は、スプレーガン30の先端を冷却水で冷却するように構成されている。好ましくは、この識別表示装置2は、ロボット32を備えている。このロボット32は、スプレーガン30を移動可能に支持している。このスプレーガン30は、棒鋼材3に識別表示を表示する表示位置と、棒鋼材3の上方から水平方向外側に所定の距離離れた退避位置との間で、移動可能にされている。
(もっと読む)
液滴塗布装置および液滴塗布方法

【課題】塗布対象物に液滴を吐出して塗布パターンを形成する処理を正確に実行することができる技術を提供する。
【解決手段】撮像ユニット70は、塗布対象物である基材シート90に対して相対移動しながら基材シート90を撮像して、基材シート90の撮像データを取得する。塗布ユニット10が備える塗布ヘッド11は、基材シート90に対して薬液を液滴として吐出する。制御部は、撮像ユニット70が取得した撮像データに基づいて塗布ヘッド11からの薬液の吐出を制御して、基材シート90上に所定の塗布パターンを形成させる。
(もっと読む)
ターンテーブル式噴射機
【課題】 対象物の大きさ、形状などの多様化に対応させ、かつ噴射物が対象物以外に付着することによる弊害を低減させるように改良したターンテーブル式噴射機を提供する。
【解決手段】 間欠回転駆動する作業テーブル3と、作業テーブル3の周方向に等間隔毎に周設され、対象物(ワークW)を保持しつつ自転させる複数の対象物セット部4と、作業テーブル3の中央開口部3fを通って昇降する昇降ベース6bと、昇降ベース6b上に配置され、対象物セット部4の対象物のうち一つに対する噴射物の噴射方向Fを持つ噴射ガン5を、噴射方向Fに移動自在にする噴射ガン移動機構9と、を備え、作業テーブル3が一時停止する状態において噴射位置Tに達した対象物に対して、噴射ガン5を所定距離まで移動させた状態で昇降させながら噴射する。
(もっと読む)
塗装システム及び塗装システム運転方法
【課題】塗装システムの設備コスト及び運転コストを低減するとともに、省エネルギ化や二酸化炭素排出量の低減を効果的に達成する。
【解決手段】制御手段12による自動塗装において、被塗物Wを移動手段11により両側の塗装ロボット8のうちの一方側の塗装ロボットLa,Lbに近づけて他方側の塗装ロボットRa,Rbから遠ざけた一方寄り塗装位置Lsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる一方寄り塗装工程KLを実行し、その後、被塗物Wを移動手段11により他方側の塗装ロボットRa,Rbに近づけて一方側の塗装ロボットLa,Lbから遠ざけた他方寄り塗装位置Rsに移動させた状態で、それら一方側及び他方側の塗装ロボット8夫々を被塗物Wに対して塗装動作させる他方寄り塗装工程KRを実行する構成にする。
(もっと読む)
塗装機器および塗装方法
本発明は、塗装剤を用いて部品を塗装する、具体的には塗料を用いて車両部品を塗装する塗装機器および塗装方法に関連し、塗装剤を塗布する塗布装置を備える。本発明によれば、塗布装置は、少なくとも1つの塗装剤ノズルから塗装剤を吐出するプリントヘッド(8、9)である。 (もっと読む)
流体噴射装置、流体噴射手術器具及び流体噴射方法
【課題】流体の噴射を適切に行うことが可能な流体噴射装置、流体噴射手術器具及び流体噴射方法を提供する。
【解決手段】流体噴射装置1は、加圧した流体を流す流路201及び流路201に連通する流体噴射口212を有する流路管200と、流路201に流体を供給する流体供給手段20,100と、流体供給手段20,100による流体の供給を制御する制御手段30と、流路管200の姿勢を検出し、検出した流路管200の姿勢に応じた信号を制御手段30に入力する姿勢検出手段120と、を備える。そして、制御手段30は、姿勢検出手段120から入力された信号に応じて流体供給手段20,100による流体の供給を制御する。
(もっと読む)
インクジェットヘッドユニットの調整装置
【課題】産業用の高精細インクジェット装置に付設したインクジェットヘッド用アライメント装置において、インクの吐出状態の確認がインクジェット装置本体に依存するという不具合を改善するインクジェットヘッドユニットの調整装置を提供することである。
【解決手段】ヘッドノズルのアライメントとインク吐出とを併せて行え、吐出状態の評価ができるようにした。インク供給機構、吐出制御機構、インク被着機構、カメラユニットを具備する。ヘッドユニットの調整装置の中で、洗浄液を流してインクジェットヘッドを洗浄する事により、インク変更やノズル詰まりの修正も可能にする。
(もっと読む)
フラックス塗布装置
【課題】フラックス塗布対象物の単位面積当りに希望するフラックス量を正確に塗布できるフラックス塗布装置を提供する。
【解決手段】入力手段21は、基板Wの単位面積当りに必要なフラックス量、基板Wの搬送速度、および基板Wの幅方向の大きさの、各条件データを入力する。これらの各データから、ノズル17が必要とするフラックス流量を演算してポンプ25を制御する。基板Wの幅方向の大きさは、幅測定部23により自動的に測定して入力する。幅測定部23は、一方のセンサ31によるノズル検知でパルス数の計数を開始し、他方のセンサ32によるノズル検知でパルス数の計数を終了し、演算制御部24にて、予め入力されているノズル往復動用モータ18の1パルス作動時のノズル移動距離に、計数されたパルス数を乗ずることにより、センサ31,32間の距離を計測でき、基板Wの幅方向の大きさを正確に自動測定できる。
(もっと読む)
物品上のプラズマ溶射皮膜多孔性を制御する方法及びシステム
【課題】ロボット溶射ガン組立体用の溶射被覆方法を提供する。
【解決手段】本溶射被覆方法は、被覆対象の物体(20)幾何学形状の離散化モデルをインポートする段階と、数値的に特性記述した溶射パターン(22)ファイルをインポートする段階と、複数の動作位置、滞留時間、及びロボット溶射ガンの溶射方向を定める配向を含むロボット動作ファイルをインポートする段階と、動作ファイル内の各動作位置を読み取る段階と、各動作位置において物体(20)幾何学形状のどの部分が通視可能であるかを判定する段階と、各動作位置についてのコア圧縮、ロボット溶射ガンの入射角、及び溶射の跳ね飛びに基づいて物体(20)幾何学形状の各通視可能部分において空隙容積率を算定する段階と、全動作ステップについて物体(20)幾何学形状の部分上の総皮膜厚さを計算する段階とを含む。
(もっと読む)
塗布装置、レーザ加工装置および塗布制御装置
【課題】溶剤を被加工物に対して効率良く迅速に塗布することが可能な塗布装置を得ること。
【解決手段】塗布装置1において、外部装置によって被加工物の表面上で第1の加工が行われる加工領域を含む所定領域を所定の加工ブロックで分割するとともに分割に用いた各加工ブロックの領域を示す加工ブロック情報を抽出する領域設定部12と、外部装置によって加工領域内で第2の加工が行われる加工位置を示す加工位置情報および加工ブロック情報に基づいて、加工領域を含む所定領域の分割に用いた各加工ブロックの中から加工位置を含む加工ブロックを塗布対象のブロックとして抽出する塗布位置設定部13と、塗布対象ブロック抽出部が抽出した塗布対象のブロックに塗布剤を塗布する塗布部15と、を備える。
(もっと読む)
蓋体開閉装置
【課題】 自動車のフューエルリッドのようにロボットによる把持が困難な蓋体の開閉の自動化を図ると共に、各蓋体の開閉を行う手段を集約してシステム構成を簡略化させる。
【解決手段】 蓋体開閉装置としての蓋体開閉用ロボット10は、フューエルリッド22を吸着する吸着手段30とフューエルリッド22の有無を検出する非接触検出手段32とを有する吸着開閉手段24と、テールゲート26に取り付けられる係合治具50を係合するハンド52とテールゲート26の有無を検出する係合検出手段54とを有する係合開閉手段28とがロボットアーム12に支持されている。そして、吸着開閉手段24と係合開閉手段28とは一体に構成されて支持部材15に取り付けられる。
(もっと読む)
作業補助装置
【課題】対象物を小さな操作力で移動させることができ、かつ対象物が設定された許容範囲を外れた場合でも安定して対象物を許容範囲内へ戻すことができる作業補助装置を提供する。
【解決手段】作業補助装置10は、対象物30を取り付ける多関節アーム11を備える。モータ36が発生するトルクがワイヤ32を介してリンク12aを鉛直上方に引っ張ることで重力によって多関節アーム11が鉛直方向に揺動することを抑制する。各関節14はリンク12が揺動する際の抵抗力を調整可能に付与する抵抗力付与機構16を備える。コントローラ22は対象物が許容範囲50内のときは抵抗力付与機構16が各関節に付与する抵抗力を小さくする。対象物が許容範囲50外のときは抵抗力を大きくする。抵抗力は多関節アーム11の動かし難さを調整するので各関節に付与する抵抗力を大きくしても対象物が操作力の方向とは反対の方向に移動することを防止できる。
(もっと読む)
少量排気スプレー塗装処理装置
【課題】
塗装室に吸引されて外部へ排気される空調空気量を削減し、工業的に経済的で、環境保全の側面からも、少ない排気量で可能な塗装室を得ることを目的とし、特に大形の被塗装物であっても少ない排気で塗装を可能とする小形の塗装室を実現する。
【解決手段】
排気装置を備えた塗装室と、予め記憶され設定された作動信号により繰り返し作動を行う塗装ロボットを一体的に塗装ユニットとして構成し、この塗装ユニットを、前記塗装室内を通過する被塗装物に対して必要な塗装位置になるよう制御可能な移動手段によって往復動可能にする。制御手段はサーボアクチュエータ等で塗装ロボットの作動制御と連動させ限定された範囲での塗装を行い、塗装位置に追随する小形の塗装室での塗装を可能とする。
(もっと読む)
少量排気自動塗装システム及び被塗装物フィーダー
【課題】
塗装室特にスプレー用塗装室は、塗料ミストを捕集し被塗装物等への不要な付着を避けるために室内の空気を常に吸引排気処理しているが、その排気のために室内の空調した空気が排気され、膨大なエネルギー損失になっている。塗料ミストの飛散する領域を限定し、ミスト捕集に必要な排気量を削減す。
【解決手段】
塗装室内に配置した被塗装物に対し、塗装ロボットに搭載されて作動するスプレーガンで塗装するにあたり、搬送装置のホルダーに載置された被塗装物の塗装面を、スプレーガンを移動させる代わりに、ホルダー側を前後や回転移動さらには傾斜移動等の手段で制御し塗装を行う。スプレーガンの操作信号と搬送装置のホルダーの駆動とは塗装ロボットの制御装置により任意の設定位置で相互に連動させることで、スプレーガンの吹付けを排気装置に向けて集中させ、小さく排気量の少ない塗装室での塗装が可能となる。
(もっと読む)
非矩形状物体の漸次的噴射のための噴射システム
スプレーガン又はノズルの制御のためのシステム及び方法であって、移動する対象物体又は移動する対象物の一部の寸法に対応するようにスプレーガン液体放出パターンが動的に変えられるシステム及び方法。スプレーガンは、ファンエア、霧化エア、液体及びシリンダエアのための入力を含んでいる。例えばコンベアベルト上で近づいてくる対象物体の検出時に、対象物体又は対象物体の一部の形状に対応するスプレーパターンを与えるための所定の或いは同時形成された曲線にしたがってファンエア圧力、霧化エア圧力、液体圧力、シリンダエア圧力が変えられ、それにより、過剰噴射に起因する無駄及び非効率さが最小限に抑えられる。 (もっと読む)
パターン形成装置、パターン形成方法
【課題】高精度かつ安定的にパターン形成を行い、歩留まりを向上させることを可能とするパターン形成装置等を提供する。
【解決手段】パターン形成装置1は、BM、基板側ステージ3、ヘッド側ステージ5の位置を計測し、計測した位置データに基づいて、標準塗布データ41に補正処理を施して補正塗布データ43を作成し、当該補正塗布データ43に基づいて、インク吐出タイミング(吐出開始、吐出終了)を制御し、基板側ステージ3とヘッド側ステージ5との間の相対位置を制御する。また、パターン形成装置1は、基板上の白欠陥、黒欠陥、突起等の欠陥の有無及び位置を検出し、追加塗布データ45を作成し、当該追加塗布データ45に基づいて、欠陥箇所に追加塗布を行う。
(もっと読む)
板材の塗装装置
【課題】 均一な塗膜で、生産性高く、板材の一部の区域に塗装する板材の塗装装置を提供する。
【解決手段】 板材1を搬送する搬送ライン2。搬送される板材1を検知するセンサー3。センサー3より搬送ラインの前方に配置され塗料4をスプレー塗布するスプレーガン5。センサー3で板材1が検知されてからスプレーガン5の塗布位置に板材1の所定箇所が達する時間後にスプレーガン5の塗布を開始させると共に、スプレーガン5の塗布開始から所定時間後にスプレーガン5の塗布を停止させるように、スプレーガン5の作動を制御する制御手段6。これらを備えて塗装装置を形成する。板材1をセンサー3で検知してから、所定の時間後にスプレーガン5の塗布を開始すると共に、所定の時間後にスプレーガン5の塗布を停止することによって、搬送ライン2で板材1を一方向に送る間に、板材1の所定の区域に塗装することができる。
(もっと読む)
塗装用装置
【課題】塗料の飛散等による塗装不良を低減し、塗装工程に掛かる時間を短縮できる塗装用装置を提供する。
【解決手段】被塗装部材26に塗料を噴霧して塗装を行う塗装ロボット20と、搬送路24に沿って被塗装部材26を搬送するための走行軸22aと、被塗装部材26の姿勢を変更するためのアーム22bとを有し、被塗装部材26を把持して搬送する搬送ロボット22と、を備える塗装用装置200により上記課題を解決することができる。
(もっと読む)
塗装装置
【課題】 簡単な構造でありながら、外壁材等の被塗装材の形状に応じた塗装ガンの切替え動作を正確且つ容易に行うことができ、塗装効率及び塗装精度を向上させることができる塗装装置を提供する。
【解決手段】 コンベア(50)等によって搬送される被塗装材(51)(52)に対して、塗装ガン(2)(2)…を被塗装材(51)(52)の搬送方向に対して略直交する横方向に向けて相対的に移動させながら塗装を行う塗装装置(1)において、前記塗装ガン(2)(2)…を支持するリンク機構(21)(21)と、このリンク機構(21)(21)を作動させて、塗装ガン(2)(2)…の鉛直方向に対する前記横方向への傾きが切り替わるように塗装ガン(2)(2)…を移動させるためのシリンダ(26)(26)と、このシリンダ(26)(26)の伸縮状態を切り替えるための操作部(39)とを設ける。
(もっと読む)
ブレージング接合部のシーリング材塗布方法および塗布装置
【課題】レーザブレージングを施した後にブレージングビードの上からシーリング材を効率的に塗布することができるシーリング材塗布装置を提供する。
【解決手段】重ね継手の形態での母材W1,W2同士のブレージング接合部にブレージングビード3の上からシーリング材を塗布する装置である。母材W2側にブレージングビード3に近接してシーリング材塗布位置の基準となるガイド溝6を予め形成しておく。ガイド溝6に沿ってシーリングノズル7を動かしながら当該シーリングノズル7からシーリング材を吐出させて、そのシーリング材の断面形状をビード整形面9にて整形しながらブレージングビード3の上から塗布してシーリングビード5を形成する。
(もっと読む)
21 - 40 / 46
[ Back to top ]