
Fターム[5B057DA06]の内容
Fターム[5B057DA06]の下位に属するFターム
Fターム[5B057DA06]に分類される特許
21 - 40 / 1,346
検出装置、該検出装置を備えた表示制御装置および撮影制御装置、物体検出方法、制御プログラム、ならびに、記録媒体
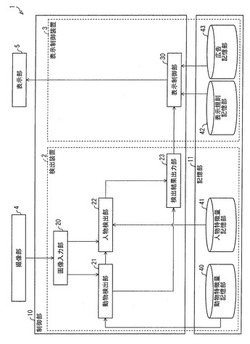
【課題】画像から動物と人物とをそれぞれ認識し、検出する検出装置を実現する。
【解決手段】画像から動物を検出する動物検出部21と、上記画像から人物を検出する人物検出部22と、動物かつ人物が検出された場合に、目的の物体が検出されたことを示す情報を検出結果として出力する検出結果出力部23とを備えていることを特徴としている。
(もっと読む)
撮像装置、その制御方法、及びプログラム

【課題】周波数成分を考慮せずに目標輝度補正量を決定する場合であっても、良好な輝度補正結果の画像を出力する。
【解決手段】撮像により順次出力された画像の輝度分布から輝度補正の目標量を決定する。また出力された対象画像の低周波数領域を特定し、対象画像に含まれる画素のうち、低周波数領域に含まれ、かつ輝度値が所定値以下の画素に対して、直近に決定された目標量で輝度補正を行い、補正後の対象画像を出力する。そして直近の目標量で補正された補正後の対象画像の輝度分布と、補正前の対象画像の輝度分布とから実効補正量を取得し、次の補正対象の画像についての輝度補正の目標量を、対象画像の輝度分布、及び直近の目標量に対する実効補正量の比率に応じて決定する。
(もっと読む)
車両の運転支援装置
【課題】自車両の進行方向と交差する方向で該自車両の前方に向って走行して来る他車を、該他車と自車両との間に存在する遮蔽構造物により検出することができない場合であっても、該他車と自車両との接触を回避するための処理を極力適切なタイミングで行う。
【解決手段】車両2に搭載したカメラ3aの撮像画像から、車両2の進行方向と交差する方向で車両2の前方に向かって移動しており、且つ、障害物検出手段7により検出されていない他車21の前照灯により照明されていると推定される他車照明路面領域を検出する他車照明検出手段8を備える。他車21が検出された場合に、他車21との接触を回避するための対策処理を実行すべきか否かを判断する処理を、他車21が検出される前に、他車照明路面領域が検出された場合と、他車21が検出される前に、他車照明路面領域が検出されていない場合とで異なる判断条件を使用して行なう。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】被写体合焦画像内で被写体領域の特定を適正に行う。
【解決手段】撮像装置100であって、背景内の所定の被写体にピントを合わせて撮像された被写体合焦画像及び被写体合焦画像の撮像条件とは異なる所定の撮像条件で撮像され、被写体合焦画像と略等しい構図を有する一の画像(被写体非合焦画像)の各々の画像情報に基づいて、被写体合焦画像内で、被写界深度外に存する物に対応し、輪郭部分が一の画像における当該物に対応する領域の輪郭部分よりも拡大されてなる輪郭拡大領域を推定する輪郭拡大領域推定部5cと、輪郭拡大領域の推定結果を基準として、被写体合焦画像内で所定の被写体が含まれる被写体領域を特定する被写体領域特定部5eとを備えている。
(もっと読む)
道路付属物検出装置、道路付属物検出方法、及びプログラム
【課題】道路標識やガードレールなどの道路付属物を高精度に自動的に検出する。
【解決手段】記憶装置6は検出対象とする道路付属物の画像特徴情報36及び、対象空間における検出対象の形状などに関する形態特徴情報38を予め格納する。画像分割手段20は対象空間を撮影した画像をそれぞれ類似する画素からなる複数の部分画像領域に分割する。候補画像領域抽出手段22は画像特徴情報36に基づいて、部分画像領域のうち検出対象に対応した候補画像領域を抽出する。壁面検出手段24は、対象空間の地物表面の三次元形状を表す点群データに基づいて地物の壁面を検出する。候補壁面抽出手段26は形態特徴情報38に基づいて、検出された壁面のうち検出対象に対応した候補壁面を抽出する。照合手段28は候補画像領域と、画像の撮影位置から見た候補壁面の投影像とを照合し、照合結果に基づいて検出対象を検出する。
(もっと読む)
閉瞼を分類するための方法
【課題】乗り物の操作者コンパートメント内に位置決めされた操作者を監視する画像センサからの生理学的データの部分の信頼性を向上させる
【解決手段】画像センサから、操作者の目、顔、頭、腕、および身体の動きのうちの少なくとも1つに関係する情報を包含する生理学的データを受信するステップと、前記生理学的データに基づいて、少なくとも操作者の閉瞼、目の動き、または頭の動きの徴候の識別を行なうステップと、生理学的データおよび操作者コンパートメント内における照明条件のうちの少なくとも1つと、現在の操作者の状態についてのあらかじめ決定済みの規則のセットとの比較を行なうステップと、閉瞼、目の動き、および/または頭の動きのタイプを、識別による閉瞼、目の動き、および/または頭の動きと比較の結果を相関させることによって分類するステップと、を包含する。
(もっと読む)
監視装置、監視方法及び監視プログラム
【課題】高精度に不審対象を検出することができる監視装置を提供する。
【解決手段】対象検出部21は、撮像部1により撮像された動画像から監視する対象を検出する。動線情報作成部22は、対象検出部21により検出された対象の移動ベクトルから動線情報を作成する。不審行動判定部24は、動線情報から、予め設定された不審行動パターン31に応じて、対象検出部21により検出された対象を不審対象と判定し、それ以外の対象を新たな不審対象候補として設定する。複合行動判定部26は、新たな不審対象候補の動線情報と、新たな不審対象候補の周辺に存在する周辺対象の動線情報とから、予め設定された条件である複合行動パターン32に基づいて、新たな不審対象候補が不審対象か否かを判定する。
(もっと読む)
動態画像診断支援システム及び胸部診断支援情報生成方法
【課題】喚気の状態だけでなく、呼吸に伴う血流の状態を加味した診断支援情報を提供できるようにする。
【解決手段】本発明に係る動態画像撮影システム100の演算装置4において、撮影装置1で撮影された胸部動態画像の複数のフレーム画像のそれぞれを複数の小領域に分割し、複数のフレーム画像間において対応する小領域毎に画像解析を行い、各小領域の喚気の状態が異常であるか否かを判定する喚気判定処理、各小領域の血流の状態が異常であるか否かを判定する血流判定処理、並びに、喚気判定処理による判定結果及び血流判定処理による判定結果に基づいて各小領域が異常であるか否かを判定する異常判定処理を実行する。そして、診断用コンソール3において、少なくとも異常判定処理における判定結果を表示する。
(もっと読む)
ジェスチャ認識装置、ジェスチャ認識方法およびジェスチャ認識プログラム
【課題】送り動作と振りかぶりを区別することができるジェスチャ認識装置を提供することである。
【解決手段】実施形態のジェスチャ認識装置は、物体あるいはユーザの体の特定部位の動きを認識する。時系列情報取得手段は、前記特定部位の位置あるいは大きさに関する時系列情報を取得する。操作区間検出手段は、前記時系列情報から前記特定部位の移動方向を検出し、前記時系列情報の開始点、前記移動方向が転換する転換点、前記時系列情報の終了点の何れか2つの組み合わせで区分される複数の操作区間を検出する。認識手段は、前記複数の操作区間のうち認識対象となる第1の操作区間およびこの第1の操作区間に後続する第2の操作区間を特定し、この第1の操作区間における前記時系列情報から抽出した第1の特徴量および前記第2の操作区間における前記時系列情報から抽出した第2の特徴量を用いて、前記第1の操作区間に対応する前記特定部位の動きを認識する。
(もっと読む)
環境認識装置及びプログラム
【課題】環境認識の精度を向上させることができる環境認識装置及びプログラムを提供すること。
【解決手段】被写体を撮像することにより得られた画像を、明度情報に基づき同一の物体である可能性が高い領域に分割し、同一の分割領域に存在する複数の特徴点となる画素の距離情報に基づいて、特徴点以外の画素の距離情報を補完して距離画像を生成し、注目画素の距離情報に基づいて特徴量を抽出するためのウインドウのサイズを変更し、該ウインドウ内の画素から注目画素の特徴量を抽出し、抽出した特徴量と予め求めておいた対象物毎の特徴量とを比較することにより画素毎に物体を識別し、分割領域内の画素の識別結果を統合して、分割領域毎に対象物を識別して環境認識を行う。
(もっと読む)
車軸検出装置
【課題】積雪時など路面部分の距離分布の計測精度が低下する場合であっても、車軸の検出精度の低下を防止できる。
【解決手段】車軸検出装置(10)は、路面と照射光軸が交わるように赤外線を照射する赤外線照射部(121)と、赤外線が照射された被写体からの反射光をそれぞれ受光して、被写体像を取得する複数の画像取得部(123)と、複数の画像取得部(123)でそれぞれ取得された複数の被写体像に基づいて、前記被写体までの距離分布を検出する距離分布検出部(126)と、被写体に車両が含まれない場合の該被写体までの距離分布である背景距離分布を記憶する背景距離分布記憶部(131)と、検出された距離分布から車両に対応する部分の距離分布を車両距離分布として抽出する車両距離分布抽出部(132)と、抽出された車両距離分布と記憶された背景距離分布とが位置的に連続している場合に、車軸ありと判定する判定手段と、を具備する。
(もっと読む)
移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法
【課題】人手を介さずに非車両パターンの収集を自動的に行うとともに収集した非車両パターンを用いて車両などの移動体を高精度に検出することができる移動体検出装置、移動体検出システム、コンピュータプログラム及び移動体検出方法を提供する。
【解決手段】負例特徴量算出部108は、時刻tから所定時間Ts経過後の時刻(t+Ts)での撮像画像上で時刻tでの撮像画像上で特定された移動体候補領域の対応領域の画素値に基づく特徴量を算出する。負例類似度算出部109は、移動体候補領域の特徴量と対応領域の特徴量との類似度を算出する。負例登録部110は、算出した類似度が所定の閾値S以上である場合、移動体候補領域を非車両パターンとして登録する。
(もっと読む)
監視システム、および、混雑率算出方法
【課題】監視システムで、列車の車内などを効果的に監視する。
【解決手段】監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、車両内に存在する人物を検出し、その人物が車両をどれくらい占める割合で検出されたかにより、乗車率Aを判定する。また、監視カメラ111〜114によって撮像された映像データ或いは記録装置に記録されている映像データを基に、乗降車する人数を計測し、最大乗車可能人数に対する現在乗車している人数により、乗車率Bを判定する。そして、これら2通りの方法で算出された乗車率から、平均値を取る等して精度の高い乗車率を判定する。
(もっと読む)
対象物検出装置
【課題】人間等の対象物が背景の建造物等の物体と同程度の温度であっても、赤外線を利用して対象物を検出することが可能な対象物検出装置を提供する。
【解決手段】車両周辺監視システム10は、入射された赤外線の強度に応じて赤外線画像を出力する赤外線カメラ11,12と、赤外線カメラ11,12が出力した赤外線画像に基づいて対象物を検出する第1及び第2対象物検出手段102,103とを備える。第2対象物検出手段103は、物体から放射される赤外線の放射率又は赤外線量の波長特性によって対象物を特定する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
人体動作周期の特定と人体動作の認識の方法、装置、及びプログラム
【課題】
ビデオにおける人体動作周期を特定し、人体動作を特定すること。
【解決手段】
本発明は、人体動作周期を特定し、及び人体動作を認識する方法及び装置を提供する。前記ビデオにおける人体動作周期を特定する方法は、探索範囲内の各フレームの人体領域を複数の人体部分に区分する処理と、現在のフレームにおける各人体部分の局所動作周期を特定する処理と、前記局所動作周期に基づいて現在のフレームにおける人体動作周期を特定する処理とを含む。異なる動作や異なる個体に対して適応して人体動作周期を特定することによって、時間的・空間的特徴をより正確に抽出することができ、より正確な人体動作認識を実現することができる。
(もっと読む)
対象物検出装置
【課題】対象物検出装置は、画像に所定の対象物が含まれていることを検出するために、一定の処理量が必要となるパターン認識処理を行う。このパターン認識処理に必要となる処理量は、従来の対象物検出装置において比較的大規模なものとなっている。よって、このパターン認識処理における処理量を削減したいという要望がある。
【解決手段】撮像装置群が撮影する2枚1組のステレオ画像に写っている被写体における視差を利用して、画像を構成する画素毎に、被写体までの距離を算出する。そして、画像に写っている被写体のうち、背景よりも手前に写っている被写体の部分の画素群を抽出する。さらに、これら抽出した被写体の部分の画素群に対して、統計的学習に基づくパターン認識処理を行い、これら抽出した被写体の部分の画素群の中に、予め定められた所定の対象物が被写体として含まれていることを検出する。
(もっと読む)
外観投影装置を用いてロボットの動作を決定するロボットシステム
【課題】ワークの位相を容易に検出して、ワークの位相を補正する。
【解決手段】ロボットシステムは、周方向に延びる側面を有する被検出物(4)を把持する把持機構を備えたロボット(1)と、被検出物をその中心軸線の方向に挿入可能な開口部(7)、および被検出物を挿入する挿入方向において開口部から半径方向外側に向かって広がる鏡面加工された湾曲した内面(8)を含む外観投影装置(5)と、被検出物が開口部に挿入されたときに湾曲した内面に投影された被検出物の像を撮像する撮像装置(12)と、撮像装置により撮像された被検出物の像を画像処理して、被検出物の側面に備えられた位相特徴部(6)を検出するか、または被検出物の側面を検査する画像処理部(21)とを含む。
(もっと読む)
環境認識装置および環境認識方法
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
画像処理装置および画像処理方法
【課題】人物の顔を含む画像の色が適正である場合に不要なホワイトバランス補正処理を実行しないように設定する技術の提供。
【解決手段】実行順序が予め決められた複数の種類の画像処理を含む複合自動画像処理であって、ホワイトバランス補正処理と肌色補正処理とを実行する場合には前記ホワイトバランス補正処理が先に実行される複合自動画像処理を、人物の顔を含む画像を示す画像データに基づいて実行するにあたり、前記画像データに基づいて、被写体の色と比較して画像の色が特定の色に偏っている色かぶりの程度に応じて変化する特徴量を抽出し、前記特徴量に基づいて、前記色かぶりが発生しているか否かを判定し、前記色かぶりが発生していないと判定された場合、前記複合自動画像処理において前記ホワイトバランス補正処理を実行せずに前記肌色補正処理を実行するように前記複合自動画像処理にて実行される画像処理を設定する。
(もっと読む)
21 - 40 / 1,346
[ Back to top ]