
Fターム[5F031JA45]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出する情報 (3,081) | 物理量 (856)
Fターム[5F031JA45]の下位に属するFターム
Fターム[5F031JA45]に分類される特許
41 - 60 / 314
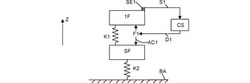
パターニングデバイスから基板上にパターンを転写するためのリソグラフィ装置、および制振方法
【課題】改善された結像性能を有する装置を提供する。
【解決手段】本発明は、振動絶縁システムを介してベースによって支持されたサポートフレームと、パターンをパターニングデバイスから基板上に転写するように構成された投影システムであって、サポートフレームによってばね支持された第1のフレームを含む投影システムと、第1のフレームの運動を減衰するように構成された能動制振システムであって、第1のフレームの絶対的な運動を表す第1のセンサ出力を供給するように構成された第1のセンサシステム、第1のフレームとサポートフレームの間に力を加えるように配置された第1のアクチュエータシステム、および第1のセンサ出力に基づいて第1のアクチュエータシステムに駆動信号を供給するように構成されたコントロールシステムを含む能動制振システムとを含むリソグラフィ装置に関する。
(もっと読む)
基板処理装置のデータ取得方法及びセンサ用基板

【課題】基板処理装置の各モジュールのデータを効率よく取得すると共に精度高い検査を行うこと。
【解決手段】
モジュールの情報を収集するためのセンサ部と、前記センサ部に電力を供給するための受電用コイルとを備えたセンサ用基板を前記保持部材に保持する工程と、次いで前記保持部材を前進させて前記センサ用基板を前記モジュールに受け渡す工程と、記基台と共に移動する送電用コイルに電力を供給して磁界を形成すると共に、この磁界中で当該送電用コイルと前記受電用コイルとを共鳴させ、前記送電用コイルから前記受電用コイルに電力を供給する工程と、前記センサ部によりモジュールに関するデータを取得する工程と、を含む基板処理装置のデータ取得方法を実行する。
(もっと読む)
基板処理装置及び基板処理方法
【課題】マルチモジュールを構成するモジュールが使用不可モジュールとなったときにおいて、スループットの低下を抑えること。
【解決手段】使用不可モジュールが発生した後は、複数の単位ブロックにおいて最も早く載置可能になった搬入モジュールに基板を払い出し、前記複数の単位ブロックの夫々においては、基板が搬入モジュールに払い出された順番に沿って、搬送手段により基板をモジュール群に順次搬送して搬出モジュールに受け渡す。
そして、基板が搬入モジュールに払い出された順番に沿って、基板を搬出モジュールから取り出し、後段モジュール又は基板載置部に搬送する。この後、通常時に基板が搬入モジュールに払い出される一定の順番に沿って、搬出モジュール又は基板載置部から後段モジュールに基板を搬送する。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
搬送ロボット、円盤状搬送対象物アライメント方法
【課題】単一のセンサを利用してハンドに載置したウェーハの位置と正規の載置位置との差異を正確に求め、ウェーハを正確に搬送する。
【解決手段】ハンドに載置したウェーハ7のセンサ6に対する通過距離と、ハンド上における正規の載置位置に載置保持したウェーハ7がセンサ6を通過する距離と、ウェーハの半径とを利用して、ハンドに載置したウェーハ7の位置と正規の載置位置との差異を求める載置位置差異算出手段42と、その差異を旋回軸31a及びアーム2のロボット動作極座標系における補正値に変換して算出する補正値算出手段43と、その補正値を出力する補正値出力手段44とを有する搬送ロボット1とした。
(もっと読む)
真空処理システム
【課題】真空処理室において高温で処理されたウェハを微小異物や汚染が問題にならない温度に効率良く冷却できる真空処理システムを提供する。
【解決手段】複数の試料が収納されたカセットを設置したカセット台と、前記試料を搬送する大気搬送室と、前記大気搬送室から搬送された前記試料を収納し大気雰囲気もしくは真空雰囲気に切り替え可能なロック室と、前記ロックに連結された真空搬送室と、前記真空搬送室を介して搬送された前記試料を処理する真空処理室とを備える真空処理システムにおいて、少なくとも1つの前記真空処理室で処理された前記試料を第一の温度に冷却する冷却室と、前記冷却室で冷却された前記試料を第二の温度に冷却する冷却部とを備え、前記冷却部は、前記大気搬送室に配置され、前記冷却室で冷却された前記試料を前記第二の温度に冷却する冷却手段を有することを特徴とする真空処理システムである。
(もっと読む)
ダイボンディング装置とボンディング方法
【課題】簡単な構構成で、コレットの着地と、その先端に吸着保持されたダイの傾斜をも含めてより確実に検出可能とするダイボンディング装置とボンディング方法を提供する。
【解決手段】先端に半導体チップを吸着及び保持するコレットを含むボンディングヘッドと、前記ボンディングヘッドを保持して水平方向に移動する水平移動機構と、前記コレットを上下方向に移動する垂直移動機構と、前記ボンディングヘッドと前記コレットとの間の一部に、複数個の感圧素子を備えた着地及び傾斜検出部を設けたダイボンディング装置。
(もっと読む)
フォトマスク用基板またはフォトマスクブランクを収納する収納ケース
【課題】 フォトマスク用ガラス基板等の表面の品質及び収納ケースの内部に異物が存在するかを容易に検査することができる収納ケースを提供する。
【解決手段】 フォトマスク用基板17を収納する収納ケース11は、蓋12とケース本体13とから主に構成されている。蓋12とケース本体13とは金属材料からなる。蓋12がケース本体13に接合されると、収納ケース11の内部に基板収容室51が形成される。基板収容室51を画成する内面52,53には黒色皮膜が形成されている。
(もっと読む)
基板検知装置及び方法
【課題】基板に電圧を印加して基板にダメージを及ぼすことなく、当該基板における、大型基板において特に顕在化する複雑な態様の反りの発生部位及び発生状態を容易且つ正確に特定する。そして、大型基板でも確実なチャッキングに供することを可能とする。
【解決手段】センサ部2は、搭載面1aの中央部分に設けられた第1のセンサ群11と、第1のセンサ群11を囲む第2のセンサ群12と、第2のセンサ群12を囲む第3のセンサ群13とを有する。第1のセンサ群11は、基板面の中央部分に対応して設けられた1つの静電容量センサ10aから、第2のセンサ群12は、第1のセンサ群11を同心状に囲む複数の静電容量センサ10aから、第3のセンサ群13は、第2のセンサ群12を同心状に囲み、搭載面1aの周縁の近くに設けられた複数の静電容量センサ10aを有する。
(もっと読む)
半導体ウェーハの支持構造検討装置
【課題】半導体ウェーハの支持構造を効率的に検討し、検討に要する時間を短縮できる半導体ウェーハの支持構造検討装置を提供する。
【解決手段】半導体ウェーハよりも大きいベース板10に、半導体ウェーハの周縁部に干渉するサポート具20を設けた支持構造検討装置であり、ベース板10に、半導体ウェーハの周縁前部に対して進退動可能なスライダ12を配置する。また、サポート具20を、半導体ウェーハの周縁後部を挟持する第一のサポート具21と、半導体ウェーハの周縁両側部を支持する第二のサポート具30と、半導体ウェーハの周縁前部を挟持する第三のサポート具32とから構成し、ベース板10とスライダ12のいずれか一方には、スライダ12の進退動量を検出する変位検出器40を設置し、スライダ12に、第一、第三のサポート具21・32に挟持された半導体ウェーハ用の荷重検出器41を設置する。
(もっと読む)
半導体集積回路装置の製造方法
【課題】半導体集積回路装置の製造工程のうちの組立工程におけるダイシング後のチップのピックアップ工程では、急速なチップの薄膜化によって、ピックアップ不良の低減が重要な課題となっている。特に、剥離動作によるチップ周辺部の湾曲がチップの割れ、欠けを惹起する可能性が高い。
【解決手段】これらの課題を解決するための本願発明は、ダイシング・テープ(粘着テープ)等からチップを吸引コレットで真空吸着して剥離する場合において、吸引コレットの真空吸着系の流量をモニタすることで、チップが粘着テープから完全に剥離する以前のチップの湾曲状態を監視するものである。
(もっと読む)
基板搬送ロボット
【課題】 位置決め精度を向上するとともに、外部の物体との干渉を防ぐことができる基板搬送ロボットを提供する。
【解決手段】 第1および第2アーム部36,37は、互いに相対的に旋回可能に設けられる。第1および第2アーム部36,37間の関節には、第2旋回駆動手段42が設けられる。第2旋回駆動手段42は、第2モータ76と、第2動力伝達部77とを有する。第2モータ76は、第1アーム部36に固定される固定部78と、固定部78に対して、第1アーム部36の延在方向に略平行な回転軸線L22まわりに回転する回転部79とを有する。第2動力伝達部77は、第2モータ76と第2アーム部37との間に介在し、第2モータ76の動力を、第2モータ76の回転部79から第2アーム部37に伝達する。このような第2旋回駆動手段42によって、第1および第2アーム部36,37が互いに相対的に旋回駆動される。
(もっと読む)
シート貼付装置および貼付方法
【課題】剥離シートおよびスペーサシートを効率的に回収できるシート貼付装置および貼付方法を提供すること。
【解決手段】シート貼付装置1は、帯状の剥離シートRLの一方の面に所定形状の接着シートMSと剥離シートRLの繰出方向に沿って連続するスペーサシートS1とが仮着された原反Rを繰り出す繰出手段4と、繰出手段4により繰り出された原反Rの剥離シートRLからスペーサシートS1を除去する除去手段5と、除去手段5でスペーサシートS1が除去された剥離シートRLから接着シートMSを剥離する剥離手段6と、剥離手段6で剥離された接着シートMSを被着体Wに押圧して貼付する押圧手段7と、除去手段5で除去されたスペーサシートS1および剥離手段6で剥離された剥離シートRLを重ねて巻き取る巻取手段8とを備えている。
(もっと読む)
チップ搭載装置、傾き検出方法およびプログラム
【課題】チップ搭載装置が、ターゲットマークの付されてないウェハに対しても、より迅速に傾き補正を行えるようにする。
【解決手段】画像処理部610が、1行(横の並び)分の半導体チップの基準点の座標値を算出する。傾き検出部620は、座標値を算出された基準点の近似直線を求め、この近似直線の傾きを求める。駆動制御部630は、傾き検出部620が求めた傾きに基づいてチップ積載部50を回転させて傾き補正を行う。このように、基準点の座標値を求めて傾き補正を行うので、ターゲットマークの付されていないウェハに対しても傾き補正を行える。また、1行分の半導体チップの基準点に対して傾き補正を1回行えばよいので、より迅速に傾き補正を行える。
(もっと読む)
基板ホルダーストッカ装置及び基板処理装置並びに該基板ホルダーストッカ装置を用いた基板ホルダー移動方法
【課題】フットプリントを低減できる基板ホルダーストッカ装置を提供する。
【解決手段】基板に真空処理を行うプロセスチャンバ内を搬送される基板ホルダーを収納する基板ホルダーストッカチャンバ18は、複数の基板ホルダーをその板厚方向に並べて保持するとともに往復移動する可動式テーブルAと、可動式テーブルAと並設され、複数の前記基板ホルダーその板厚方向を並べて保持するとともに往復移動する可動式テーブルBと、所定位置に停止した可動式テーブルA及び可動式テーブルBのいずれか一方に保持された基板ホルダーを、可動式テーブルA及び可動式テーブルBのいずれか他方に保持させるテーブル間移送機構31とを備えている。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】稼動速度で基板の載置位置が正常であるか否かを確実に検出すること。
【解決手段】基板を保持して搬送する水平、鉛直方向の移動及び鉛直軸回りに回転自在な搬送アームA3と、搬送アームとの間で基板を受け渡しすると共に、基板を載置して処理を施す熱処理装置70と、歪み量を測定する歪みセンサを同心円上の等間隔の位置に複数個備える、基板と同形状の歪みセンサ付きウエハWAと、搬送アーム及び熱処理装置の駆動部を制御すると共に、歪みセンサからの検出データを入力し、入力された検出データと予め記憶された正常動作時の歪みデータ標準データとを比較解析する判別部80Aを備える制御部80と、を具備し、歪みセンサ付きウエハを搬送アームから熱処理装置へ受け渡すとき、又は熱処理装置が歪み測定用基板を載置するときに、判別部によって歪みセンサからの検出データの値が正常であるか否かを判定し、その判定結果を制御部に伝達する。
(もっと読む)
吸着装置、当該吸着装置を備えた気相成長装置、および吸着方法
【課題】吸着状態の誤判断を防ぐことができる吸着装置、当該吸着装置を備えた気相成長装置、および吸着方法を提供すること。
【解決手段】本発明では、吸着部16を構成する各吸着パッド(図示せず)には、流量センサ66が接続されており、個々の流量センサ66は、各吸着パッドとポンプ82との間の空気の流量を測定する。また、全体用流量センサ62は、吸着部16とポンプ82との間の空気の流量を測定する。制御部54では、個々の流量センサ66および全体用流量センサ62の測定値に応じて、流量センサ66の測定値の閾値を変更する。変更した閾値に基づいて、吸着部16の吸着状態の判定を再度行うことによって、実際には基板トレイ32を吸着しているにも拘らず、基板トレイ32を吸着していないと誤判断されてしまうのを防ぐことができる。
(もっと読む)
露光装置及びデバイス製造方法
【課題】流出した液体に起因する不都合の発生を防止できる露光装置を提供する。
【解決手段】流出した液体に起因する不都合の発生を防止できる露光装置を提供する。露光装置は、周壁部(33)と周壁部(33)の内側に配置された支持部(34)とを有し、周壁部(33)に囲まれた空間(31)を負圧にすることによって基板(P)を支持部(34)で支持する基板ホルダ(PH)と、周壁部(33)の内側に設けられた回収口(61)と回収口(61)に接続する真空系(63)とを有する回収機構と備え、周壁部(33)の上面(33A)と基板(P)の裏面(Pb)とが第1距離だけ離れた状態で、基板(P)の外周から浸入した液体(LQ)を吸引回収する。
(もっと読む)
研磨装置および方法
【課題】半導体ウエハ等の基板の変形および基板にかかる応力を低減し、基板の欠陥や基板の破損を防止して、基板のトップリングからの離脱(リリース)を安全で効率的に行うことができる研磨装置および方法を提供する。
【解決手段】研磨面を有した研磨テーブルと、少なくとも一部が弾性膜4で構成された基板保持面を有し、基板保持面で基板Wを保持して研磨面に押圧する基板保持装置と、基板保持装置からの基板受け渡し位置において基板保持装置から基板Wの受け渡しを行う基板搬送機構150と、基板搬送機構150と一体に設けられるか又は別途設けられ、基板Wを基板保持面から剥離する基板剥離促進機構153と、基板保持装置を回転駆動させる回転駆動機構と、基板保持装置の回転角度位置を検知する検知機構と、基板保持装置の回転角度位置を制御する制御部50とを備えた。
(もっと読む)
半導体搬送装置
【課題】半導体搬送装置が外部ユニットにアクセスするときに発生する恐れのある気流の乱れ、それによるウェーハへの異物の付着を抑制する。
【解決手段】ファンフィルタユニット4からのダウンフローによって、半導体搬送装置2内の風量は矢印24のようになる。半導体製造装置1のチャンバー内の状態によって、シャッター22を開けたときに気流が乱れ、矢印25,26,27の気流が生じ、その影響でウェーハカセット5内のウェーハ6を汚染するおそれがある。そこでロボットアーム29の上面及び下面に風量測定器23を設け、気流の乱れ25,26を検出して、シャッター21を閉じることで、ウェーハ6に異物が付着することを防止する。
(もっと読む)
41 - 60 / 314
[ Back to top ]