
Fターム[5F031JA45]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出する情報 (3,081) | 物理量 (856)
Fターム[5F031JA45]の下位に属するFターム
Fターム[5F031JA45]に分類される特許
21 - 40 / 314
ダイボンダのピックアップ方法およびダイボンダ
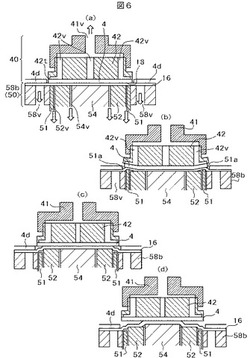
【課題】確実にダイを剥離できるダイボンダを提供すること,または前記ダイボンダを用い、信頼性の高いダイボンドまたはピックアップ方法を提供する。
【解決手段】ダイシングフィルム16に貼り付けられた複数のダイ(半導体チップ)4dのうち剥離対象のダイ4を突上げて前記ダイシングフィルムから剥離する際に、前記ダイの周辺部のうちの所定部における前記ダイシングフィルムを突上げて剥離起点51aを形成し、その後、前記所定部以外の部分の前記ダイシングフィルムを突上げて前記ダイを前記ダイシングフィルムから剥離することを特徴とする。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法

【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
半導体素子装着装置及びその装着方法
【課題】本発明は、2種類の半導体素子を1個のワークに装着する半導体素子装着装置において、1種類の半導体素子のみを装着する場合においても、より生産効率の高い半導体素子装着装置を提供することである。
【解決手段】本発明は、各ワークを所定間隔毎に設けられた複数の送り爪で係止し凹状の搬送路を間欠送りし、前記所定間隔で規定される所定のピッチで前記送り爪を往復動作させて搬送し、最大N個(2≦Nの整数)の前記ワークを同時に前記送り爪にそれぞれ1個ずつ係止できるように前記搬送路に供給し、最大N個の前記ワークにそれぞれ半導体素子を装着することを特徴とする。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】描画データの解像度やエンコーダのパルス信号の周期に依存することなく露光間隔を設定し、描画データの解像度で決まる露光間隔とエンコーダのパルス信号の周期で決まる露光間隔とのずれを小さくして、描画精度を向上させる。
【解決手段】チャック10と光ビーム照射装置20との相対的な移動量に応じたパルス信号を出力するエンコーダ32を設け、エンコーダ32のパルス信号からチャック10と光ビーム照射装置20との相対的な移動量を検出する。描画データの解像度よりも細かな解像度で基準座標を設定し、目標とする基準露光間隔に対して、描画データの解像度で決まる露光間隔及びエンコーダ32のパルス信号の周期で決まる露光間隔を、基準座標上で演算して、チャック10の位置座標を決定し、チャック10の位置座標に応じた描画データを光ビーム照射装置20の駆動回路へ供給する。
(もっと読む)
基板処理装置および基板処理方法
【課題】基板を搬送しつつ加熱する基板処理装置および基板処理方法において、基板の熱均一性を向上させる技術を提供する。
【解決手段】基板9を加熱処理するチャンバ4内の気流を、基板9の位置に応じて変化させる。基板9の搬入時には搬入口41からチャンバ内に流入する気流を形成する。基板9がチャンバ4内にて加熱される際は、排気口51aおよび51bから排出される気体の量を制御することにより、基板9の中央部から端部方向に向かう気流を形成する。これにより、基板9の前端面および後端面は、加熱プレート2により加熱された気体による熱の影響を受けにくい状態で搬送される。その結果、基板9の加熱均一性が向上する。
(もっと読む)
露光装置
【課題】露光装置において、マスクを基板に近接させる時に、両者に空気圧が発生し、マスクが変形して、これが平坦(露光可能な状態)に戻るまでに時間を要するために、マスク近接速度向上の妨げとなり、高スループット化の妨げとなる可能性がある。
【解決手段】マスクをガラス基板に近接させる時の速度プロファイルを、加速時の加速度を減速時の加速度より大きくするように制御することにより前記空気圧力上昇を小さくでき、マスクの変形量を小さくできる。その結果、マスク近接速度を向上できるので、スループットを向上できる。
(もっと読む)
位置合わせ装置、基板搬送装置および基板検査装置
【課題】保持部に対する基板の位置合わせを正確に行う。
【解決手段】基板保持部によって基板を保持させる際に基板保持部に対して予め決められた位置関係となるように基板を位置合わせ可能に構成され、各々の基端部32同士が回動可能に連結されると共に各基端部32と基板保持部との位置関係が固定された状態で基板保持部に取り付けられる一対のアーム31a,31b、および各々の先端部42同士が回動可能に連結されると共に各々の基端部45が各アーム31a,31bの各中間部位35に対して回動可能にそれぞれ連結されて各アーム31a,31bを連結する一対の連結部41a,41bを有するリンク機構21a,21bと、各連結部41a,41bの各先端部42と各アーム31a,31bの各基端部32との離間距離を変化させて各アーム31a,31bの各先端部37間の距離を伸縮させる駆動機構23とを備えている。
(もっと読む)
プラズマ処理装置およびプラズマ処理方法
【課題】ステージ温度変化など運用条件の変更に対応し、突入電流の発生や過剰なESC電流が流れることを防ぎ、なおかつ伝熱用ガスを導入する時点で裏面圧力以上の静電吸着力を発生させる。
【解決手段】被処理基板をプラズマ処理するための処理室と、該処理室内にプラズマを発生させるプラズマ発生手段と、処理室内に設けられ被処理基板を保持する静電吸着膜を備えたステージを具備したプラズマ処理装置において、静電吸着膜と被処理基板間に流れるESC電流の電流値を検知し、ESC電流の値で吸着条件を設定し、ESC電流が設定した制御範囲内に収まるようにESC電流を検知しながら吸着電圧を段階的にステージに印加し、ESC電流が制御範囲内に収まったことを検知した後に伝熱用ガスを導入する。
(もっと読む)
半導体チップのピックアップ装置及びピックアップ方法
【課題】この発明は不良チップをピックアップせず、良品チップだけを確実にピックアップできるピックアップ装置を提供することにある。
【解決手段】半導体ウエハを照明する光源44と、半導体ウエハの各チップを撮像する撮像カメラ43と、撮像カメラによってチップを撮像するとき、光源によって半導体ウエハを照明する照明光の光量を、ミラーチップからの反射光の影響を受ける部分ではその影響の度合に応じて影響を受けない部分よりも減少させる設定部42及び演算処理部47と、光量が制御された照明光によって半導体ウエハを照射して撮像カメラで撮像し、撮像カメラの撮像信号を閾値と比較してチップが良品チップ或いは不良チップであるかを判定する制御装置41の判定部48具備する。
(もっと読む)
リソグラフィ・プロセス制御のための方法およびシステム
【課題】リソグラフィ・プロセスを評価し、かつ制御するための方法、システムを提供する。
【解決手段】リソグラフィ・プロセス(16)中にウェハ上に配置されたレジストの少なくとも1つの特性を測定する(22)ことを含むことができる。リソグラフィ・プロセスのクリティカルな測定基準には、それだけには限られないかもしれないが、リソグラフィ・プロセス(32)中に形成されたフィーチャのクリティカル寸法を含むことができる。本方法はまた、リソグラフィ・プロセスのステップを実行するように構成されたプロセス・モジュール(36)の少なくとも1つのパラメータを変更し、クリティカルな測定基準(46)のウェハ内変動を低減することを含むことができる。プロセス・モジュールのパラメータは、レジスト(16)の少なくともその1つの測定された特性に応答して変更することができる。
(もっと読む)
真空処理装置の運転方法
【課題】作業効率が良く精度の高いティーチングを行って処理の効率を向上できる真空処理装置の調整方法を提供する。
【解決手段】その上面に所定の波長の光の反射の特性を局所的に異ならせた特定の箇所を有した調整用の試料を前記試料台の上面の特定の位置と前記特定の箇所とを合わせて載置した後、前記真空容器の内部を封止した状態で前記ロボットを移動させて前記ロボットのアーム上の所定の位置に配置され前記反射した所定の波長の光の通過部を前記調整用の試料の前記特定の箇所の上方に移動させ、その移動の際に前記調整用の試料から向かって前記通過部を通過した光を前記板部材の外側で検知し、検出した前記光の量に応じて前記試料の特定の箇所と前記ロボットの所定の位置との位置合わせを行う。
(もっと読む)
露光装置及びデバイス製造方法、並びに露光装置の制御方法
【課題】液浸領域を形成する液体の漏洩により基板周辺の装置・部材が受ける影響を抑え、良好に露光処理できる露光装置を提供する。
【解決手段】露光装置は、投影光学系と液体とを介してパターン像を基板上に投影することによって基板を露光するものであって、投影光学系と基板との間へ液体を供給する液体供給機構を備えている。液体供給機構は、異常が検出されたときに液体の供給を停止する。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】搬送する基板の大きさに応じて基板保持機構の大きさを調整し得る基板搬送装置を提供する。
【解決手段】本発明による基板搬送装置100は、処理台A上の基板Bを搬送する基板搬送装置であって、処理台Aから基板Bを持上げる第1基板持上げ機構110と、基板Bの大きさに合わせて開閉し、持上げた基板Bを保持する基板保持機構120とを備える。さらに処理台Aは、第1固定台A1と第2固定台A2とを含み、基板保持機構120は、第1固定台A1と第2固定台A2との間を移動し、第1基板持上げ機構110と基板保持機構120との協働により、基板Bを第1固定台A1から第2固定台A2に搬送する。
(もっと読む)
搬送装置及びこの搬送装置を備えた浮揚システム
【課題】搬送後の物体が空中に浮揚した状態となるように物体を搬送することが可能な搬送装置及びこの搬送装置を備えた浮揚システムを提供する。
【解決手段】物体Wを保持部33にて保持して浮揚装置10の上方の空中に搬送する搬送部30と、搬送部30に取り付けられ、物体Wが浮揚装置10から受けている浮揚力を検知する浮揚検知部70と、浮揚検知部70の検知信号に基づいて、物体Wが、物体Wを浮揚させることのできる浮揚力を受けていると判定した場合、保持部33を物体Wから離して浮揚状態とする制御部60とを備えたものである。
(もっと読む)
基板処理システム
【課題】基板処理装置内で実際に要した搬送時間を群管理装置の側で把握することが可能な基板処理システムを提供する。
【解決手段】基板収容器を搬送する搬送部及び搬送部の動作を制御する制御部を有した基板処理装置と、基板処理装置に接続される群管理装置と、を備える基板処理システムであって、制御部は、搬送部による基板収容器の搬送に要する搬送時間を基板収容器毎に検知する検知手段と、検知手段が検知した搬送時間を群管理装置に通知する通信手段と、を備える。
(もっと読む)
基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法、及び基板位置補正方法
【課題】基板の位置ずれを検出することが可能な基板搬送用ハンド、基板搬送用ロボットシステム、基板位置ずれ検出方法を提供する。また、基板位置補正方法を提供する。
【解決手段】基板搬送用ロボットシステム10は、基板Wの下面に接触する接触部PBL、PFL、PBR、PFR及び接触部PBL、PFL、PBR、PFRに接触した基板Wの重心位置を検出するための複数のセンサSBL、SFL、SBR、SFRが設けられた基板搬送用ハンド60を有する基板搬送用ロボット20と、1)基板搬送用ハンド60上の基準となる位置にて基板Wが支持された際の各センサSBL、SFL、SBR、SFRの検出値である基準値と現在の各センサSBL、SFL、SBR、SFRの検出値との差分をそれぞれ演算する差分演算部70及び2)各差分に基づいて基板Wの位置ずれ方向を判断する第1の判断部72を有する第1の制御装置30とを備える。
(もっと読む)
シートビーム式検査装置
【課題】 ウェハを確実に吸着保持する静電チャックを提供すること。
【解決手段】 ウェハを静電的に吸着保持する静電チャック1410は、基板1405、電極1412板及び絶縁層1404を重ねて成り、ウェハの印加電圧が0ボルトから所定電圧まで時間とともに増大又は減少されるのに連動する電圧を静電チャックの電極板に印加することにより、ウェハとチャックの間に吸引力を発生する。
(もっと読む)
露光装置およびデバイス製造方法
【課題】 露光エリア内任意の位置で気体の濃度測定可能な露光装置を提供すること。
【解決手段】 基板上面と投影光学系1の間に所定の気体を供給する気体の供給手段を持つ露光装置において、前記領域の気体を取得する気体取得手段としての貫通孔11と、前記気体取得手段で取得した気体の濃度を測定する雰囲気を測定する測定器5を有し、更に前記気体取得手段が移動ステージ4と共に移動可能であることを特徴とする露光装置。
(もっと読む)
非接触式静電チャック
【課題】柔らかく剛性の低い薄物ワークでも局所変形を生じさせることなく非接触保持することができる非接触式静電チャックの提供。
【解決手段】ベース面2aに設けられたノズル4から空気を噴き出してワークを浮上させると共に、ベース面2aに設けられた電極3に電圧を印加することによりワークを静電気力でベース面2aに引き寄せる非接触式静電チャック1であって、ノズル4は、電極3が設けられた領域の少なくとも一部を囲うと共に、上記囲まれた領域Xの内側に向けてベース面2aに対し斜めに延びて開口しており、上記囲まれた領域Xにおいて、該領域の中心からの距離に応じて複数の領域(X1、X2、X3、X4)に分割し、該複数の領域のそれぞれについて上記静電気力を独立して調節する静電気力調節装置9を有するという構成を採用する。
(もっと読む)
パターニングデバイスから基板上にパターンを転写するためのリソグラフィ装置、および制振方法
【課題】改善された結像性能を有する装置を提供する。
【解決手段】本発明は、振動絶縁システムを介してベースによって支持されたサポートフレームと、パターンをパターニングデバイスから基板上に転写するように構成された投影システムであって、サポートフレームによってばね支持された第1のフレームを含む投影システムと、第1のフレームの運動を減衰するように構成された能動制振システムであって、第1のフレームの絶対的な運動を表す第1のセンサ出力を供給するように構成された第1のセンサシステム、第1のフレームとサポートフレームの間に力を加えるように配置された第1のアクチュエータシステム、および第1のセンサ出力に基づいて第1のアクチュエータシステムに駆動信号を供給するように構成されたコントロールシステムを含む能動制振システムとを含むリソグラフィ装置に関する。
(もっと読む)
21 - 40 / 314
[ Back to top ]