
Fターム[5H115PI01]の内容
車両の電気的な推進・制動 (204,712) | 車両への電力供給 (26,397) | 車両の外部から電力が供給されるもの (735)
Fターム[5H115PI01]の下位に属するFターム
交流架線から供給されるもの (117)
直流架線から供給されるもの (247)
ケーブルにより供給されるもの (37)
Fターム[5H115PI01]に分類される特許
121 - 140 / 334
パンタグラフ自動昇降装置
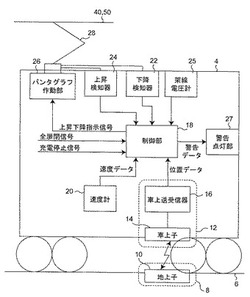
【課題】蓄電池搭載電車において、パンタグラフ、架線、及び道路設備建築物を破損してしまうこと及び充電が未了となることを防ぐ。
【解決手段】本発明に係るパンタグラフ自動昇降装置は、パンタグラフを上昇及び下降させるパンタグラフ駆動手段と、車両の位置を検出する位置検出手段と、パンタグラフの昇降状態を検出する昇降状態検出手段と、車両の停止を検出する停止検出手段と、前記パンタグラフ駆動手段を制御する制御手段とを備え、前記制御手段は、前記位置検出手段により車両が所定の位置にあることを検出され、前記昇降状態検出手段によりパンタグラフの下降が検出され、前記停止検出手段により車両の停止が検出されたときに、パンタグラフを上昇するように前記パンタグラフ駆動手段を制御する。
(もっと読む)
測量装置、鉄道測量システム、測量プログラム、情報記憶媒体

【課題】作業員が現地に赴かなくとも鉄道沿線設備の測量を簡単に行うことができる測量装置、鉄道測量システム、測量プログラム、及びこの測量プログラムを記憶した情報記憶媒体を提供する。
【解決手段】ビデオカメラ10は、列車1の進行方向の画像を撮影し、画像データを生成する。列車1の車載装置2は、ビデオカメラ10が生成した画像データをMPEG等でエンコードする。さらに、車載装置2は、測位部12から位置情報を取得する。そして、車載装置2は、動画データを構成する各画像フレームと各画像フレームを撮影した時のビデオカメラ10の位置とを対応付けた対応テーブル20を作成し、動画データ及び対応テーブル20をUSBメモリ18に保存する。測量装置3は、2枚の画像フレームが確定すると、その対応テーブル20に基づいて両画像フレーム間の距離を算出し、その距離と両画像フレームとに基づいて架線柱90の測量を行う。
(もっと読む)
鉄道車両用速度制限装置
【課題】1台の速度センサーが故障し、停車中に残りの1台の速度センサーも故障してしまった場合、速度制限装置が速度はゼロであると解釈し速度の正しい認識ができず故障検出も出来ない不安全な状況になる。このような場合にも車両の速度の安全な監視が可能になるように新たな論理を加え、鉄道車両の安全を確保する。
【解決手段】鉄道車両の速度センサーの速度信号と、当該車両の許容速度信号とを入力し、これらの情報を演算することによってブレーキ指令信号を出力する鉄道車両用速度制限装置において、許容速度信号のほかに加速指令信号を取り込み、停車状態において加速指令信号が入力しているにも関わらず、一定時間経過しても速度センサーからの速度信号がゼロのままであった場合にブレーキ指令信号を出力する。
(もっと読む)
狭帯域多周波軌道回路装置
【課題】地上と列車間で情報を伝送するとき、電気車雑音を排除して耐雑音性を飛躍的に高める。
【解決手段】送信器3から交流電化区間の基本周波数50Hz又は60Hzとその高次調波の複数の周波数の間隙である77Hzと79Hzと81Hz及び83Hzを搬送波周波数としてFSK方式により変調して、一定順番で、一定周期で交互に繰り返す狭帯域の信号波を軌道回路BTに送信する。受信器4は、軌道回路BTに送信された信号波を受信して複数の周波数に分離し、分離した複数の周波数の周期と順番を検定し、分離した4種類の周波数があらかじめ定められた一定周期、一定順番に配列している場合、軌道回路BTに列車なしと判定し、信号波を受信しないとき及び受信した4波の周波数の受信時間が一定周期、一定順番に配列していない場合は軌道回路BTに列車有りと判定する。
(もっと読む)
運転支援システムおよび運転支援方法
【課題】定速運転時の乗り心地を改善させる。
【解決手段】車両速度9Dが所定の値に達すると定速運転指令8Dを出力する高速運転支援装置11と、一または複数の車両に搭載され、定速運転指令8Dに基づいて各車両の電動機10のトルクを制御する車両制御装置9と、高速運転支援装置11から送信された定速運転指令8Dを受信する列車情報管理装置8とを備え、列車情報管理装置8は、各車両制御装置9に一括して定速運転指令8Dを送信する。
(もっと読む)
鉄道車両用空転滑走検知方法及び鉄道車両用推進制御装置
【課題】従来の鉄道車両用推進制御装置は、速度から演算される車輪の加速度だけを用いて空転滑走を検知しているため、誤検知を避けるために、空転、滑走を判定する加速度の検知レベルを大きく設定する必要があり、緩やかな空転、滑走を検知できない問題があった。
【解決手段】本発明は、この課題を解決するためのもので、モータ速度を積分し空転/滑走が発生しない場合の車両の推定推進距離と、GPS(Global Positioning System:全地球測位システム)からの位置情報に基づき実際に車両が進んだ距離である実推進距離との乖離が事前に設定された値を超えることにより空転または滑走を検知することを特徴とする空転滑走検知方法及び鉄道車両用推進制御装置であり、該乖離の値が空転、滑走の継続に応じて拡大する為、空転、滑走が緩やかに発生した場合でもこれを検知することができる。
(もっと読む)
軌道走行車両の走行制御装置
【課題】複数台の軌道走行車両が連結された状態で走行するときに発生する走行速度のオーバーシュートを低減可能な軌道走行車両の走行制御装置を提供する。
【解決手段】
鉄輪15と、鉄輪15を回転駆動する鉄輪駆動モータ16と、走行操作装置130,180と、コントローラ140と、速度センサ150とを備えた軌陸作業車1と、同様の構成の車両100と、軌陸作業車1と車両100を連結する連結棒70とを備え、コントローラ140は、軌陸作業車1および車両100が連結棒70により連結された状態で走行する際に、走行操作装置130,180の指令値に基づいて鉄輪駆動モータ16および116の駆動を制御し、さらに鉄輪駆動モータ16について、速度センサ150または250により検出された走行速度を検出し、走行速度を指令値に対応する目標速度とするように補正して鉄輪駆動モータ16の駆動を制御する。
(もっと読む)
軌道走行車両の走行制御装置
【課題】複数台の軌道走行車両が連結して走行するときに発生する走行速度のオーバーシュートを低減可能な軌道走行車両の走行制御装置を提供する。
【解決手段】
鉄輪15と、鉄輪15を回転駆動する鉄輪駆動モータ16と、走行操作装置130,180と、コントローラ140と、速度センサ150とを備えた軌陸作業車1と、同様の構成の車両100と、軌陸作業車1と車両100を連結する連結棒70とを備え、コントローラ140は、軌陸作業車1および車両100が連結棒70により連結された状態で走行する際に、メモリ143およびメモリ243に保持されている情報が互いに送受信され、当該情報に基づいて、コントローラ140は、走行速度を走行操作装置の操作に対応した目標速度にするように駆動量を補正して鉄輪駆動モータ16の駆動制御し、コントローラ240は、走行操作装置の指令値に基づいて鉄輪駆動モータ116の駆動を制御する。
(もっと読む)
車両用制御装置
【課題】機器故障時にメンテナンス、点検、交換などを各機能モジュール単位で実施することを可能にする。
【解決手段】各機能モジュールの一つの側面が信号線が接続される信号線用端子と電力線が接続される電力線用端子を具備したインターフェース面であり、各機能モジュールの信号線及び電力線の取付又は取外しがインターフェース面を有する一つの側面側からでき、前記一つの側面にあるインターフェース面と反対側の側面から、前記各機能モジュールを前記各機能モジュール単位で取付又は取外しできるよう収納する筺体を備えた。
(もっと読む)
パンタグラフ型集電装置の検査装置及びパンタグラフ型集電装置の検査方法
【課題】本発明は、安価にてすり板の正確な摩耗量や荒損位置を測定できるパンタグラフ型集電装置の検査装置を提供することにある。
【解決手段】本発明は、停止中の電車1のすり板4の表面に、ビームを連続的に照射してすり板4の表面形状データ33を取得し、この取得された表面形状データ33と予め取得しておいた設計データとを比較してすり板4の摩耗量を求めるようにしたのである。
このようにビームをすり板4の表面に連続的に照射して測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価なビームセンサ10を複数用いる必要がなくなるので、すり板4の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
(もっと読む)
列車運転制御方法及び列車運転制御装置
【課題】移動閉塞方式の列車運転制御における運転時隔の短縮。
【解決手段】列車20は、駅進入時には、先ず、停車駅の手前に設けられた待機位置に一旦停車する。また、待機停車中の後列車の位置から停止位置までの距離Lをもとに、待機位置を発車した後列車が、最短時間で停止位置に停車するための走行パターンが算出される。そして、駅に停車中の前列車が発車すると、続いて、待機位置に待機停車中の後列車が発車し、算出した走行パターンに従って運転制御される。すなわち、後列車は、加速時間t1の間、加速度αaでの加速運転を行い(加速期間)、次いで、惰行時間tiの間、惰行運転を行う(惰行期間)。その後、減速度βaでの惰行運転を行い(減速期間)、定められた駅の停止位置に停車する。
(もっと読む)
紫外線検出装置及び離線検出記録計
【課題】太陽光及びノイズに影響されずに離線による放電現象を検出できる紫外線検出装置及び離線検出記録計を提供する。
【解決手段】紫外線検出装置100は、紫外線検出部10が、紫外線領域の波長を検出感度領域とする紫外線検出管11を備える。パルス発生部20は、複数の紫外線検出部10の検出時刻を同期させる。AND回路30は、検出時刻を同期して複数の紫外線検出部10によって検出された信号の論理積による演算結果を出力する。離線検出記録計200は、画像同期記録計51が、紫外線検出装置100の出力情報及びビデオカメラ54が撮像した映像をGPS端末53が出力する現在位置データに関連させて記録する。パルスカウンタ41は、紫外線検出装置100の出力情報を計数し、パルス計数記録装置43によって計数結果を記録する。
(もっと読む)
電動台車
【課題】新たな台車枠のピッチング検出手段を設けずに、台車枠のピッチング運動を抑制する。
【解決手段】複数の車軸を有し、車軸のすべてもしくは一部が電動機により直接もしくは歯車装置を介して駆動されるピッチング回転を許容する構造を有す電動台車であり、前記ピッチング回転を検出しそれをもとに前記電動機のトルク指令を操作することにより前記ピッチング回転を抑制する制御を行う電動台車において、前記ピッチング回転の検出は前記電動機の制御に用いる電動機回転速度情報から演算することを特徴とする電動台車。
(もっと読む)
車両制御装置
【課題】電気ブレーキから空気ブレーキへの切替によってブレーキ力が急変するような場合であっても、空気ブレーキへの切替後にブレーキの効き具合を迅速に検知することができ、その結果として停止位置の精度を向上させることができる定位置停止制御装置1を提供する。
【解決手段】定位置停止制御装置1は、電気ブレーキから空気ブレーキへの切替速度域において、ブレーキ指令決定手段25によるブレーキ指令を保持する。これにより、定位置停止制御装置1は、空気ブレーキの立ち上がり完了時に、前記ブレーキ指令に対して整定状態となる制御するとともに、空気ブレーキの立ち上がり完了後に短時間で空気ブレーキの効き具合を検知できるように制御する。
(もっと読む)
車両制御装置および車両運転支援装置。
【課題】加減速指令切替時の応答時間の間だけ、加減速指令が保持されれば、加減速状況を評価できるため、制御の応答性を悪化させることなく加減速状況の評価機会を増加させ、加減速状況に応じた適切な速度制御が可能な車両制御装置を提供できる。
【解決手段】車両制御装置1は、過去の加減速指令と整定状態の判定結果を履歴保持手段25に保持しておく。車両制御装置1の加減速状況評価手段27は、現時点から加減速度演算遅れ時間前の時点が整定状態の場合、加減速度演算手段26により得られた現時点での加減速度を整定状態のものと判断し、現時点での加減速度を基準特性保持部23に保持している基準値としての基準加減速度と比較することにより加減速状況を評価する。
(もっと読む)
列車制御装置
【課題】車両特性モデルを使用して列車の定位置停止制御を行う場合、車両特性モデルを実際の車両特性に収束するようにそのモデルを調整する制御を行うことにより、制御性能を向上することにある。
【解決手段】車両特性モデルのパラメータをとして短期用と長期用の二種類を備え、列車の走行制御中に車両特性推定手段により推定された実際の減速度に基づいて短期用パラメータを調整し、停止時に次駅間の長期用パラメータを前駅間の短期用パラメータの調整結果に基づいて調整する。これら短期用及び長期用パラメータの双方に基づいて制御に供する車両特性モデルを調整し、これにより車両特性モデルが実際の車両特性に収束する方向に調整される。これを通じて、車両特性の短期的変動及び長期的変化の両方を考慮したモデルの調整がなされる。また、長期用パラメータを更に経過用と駅間用と分けた構成では、乗車率などその駅間特有の車両特性が車両特性モデルの調整に顕著に反映される。
(もっと読む)
減速度比推定装置を有する列車制御装置
【課題】列車の減速動作中に実際の車両特性を計測し、この実際の車両特性に基づいて減速動作を制御し、列車を停止目標位置に精度よく停止させる。
【解決手段】車両特性保持手段4は、ブレーキ指令値に対応する標準減速度を車両特性データとして保持する。減速度比推定手段7は減速度算出手段6にて算出された減速度と、車両特性保持手段4にて保持された標準減速度との比を示す減速度比を算出する。制御指令算出手段8は、前記減速度比算出手段にて算出された減速度比を用いて、前記車両特性データを更新し、列車速度及び位置と前記更新された車両特性データに基づいてブレーキ装置へのブレーキノッチ指令値を算出する。
(もっと読む)
発電所によりモーターに電力を供給し自動車を牽引する長距離移動システム
【課題】 発電所によりモーターに電力を供給し自動車を牽引する長距離移動システムの提供。
【解決手段】発電所によりモーターに電力を供給し自動車を牽引する長距離移動システムは、金属車輪7を備えるトレーラー1がレールを使用できるよう、高速道路中央に1本の軽軌道線路3を敷設し、発電所の電力は(都市の鉄道輸送システムのように)、軽軌道線路3を経て、トレーラー1上のモーター5に伝えられ、モーター5はトレーラー1を動かし、トレーラー1を後方の被牽引自動車2に連結し、軽軌道線路3上で走行し、これにより走行中は、自動車2のエンジンを停止し、アクセルを閉じた状態でもスピーディーに前進が可能である。
(もっと読む)
停止制御装置
【課題】電気ブレーキと空気ブレーキとの切り替わったタイミングを正確に推定し、駅定点停止制御において使用すべきブレーキモデルを誤判断無く適切に選択して精度のよい駅定点停止制御を行う停止制御装置を提供する。
【解決手段】ブレーキモデル選択情報に基づき列車を目標とする地点に停車させるための停止制御に必要なブレーキノッチ指令を生成して出力する駅定点停止ノッチ制御部6とを備え、ブレーキモデル判断部20は、列車の速度を検出する列車走行速度検出部1と、速度を微分することにより減速度を算出する減速度演算部2と、減速度の波形を微分することによりジャーク波形を算出するジャーク演算部3aと、ジャーク波形に基づき電気ブレーキと空気ブレーキとの切替が発生したか否かを判断する電気ブレーキ/空気ブレーキ切替発生判断部4と、切替の判断結果に基づきブレーキモデルを選択するブレーキモデル選択部5とを有する。
(もっと読む)
車上子検査装置
【課題】自動的に結合度を調整して、調整作業の手間を省いた車上子検査装置を提供する。
【解決手段】金属片保持部142は、金属片141を、その位置に応じて車上子3の結合度が変化するように移動可能に保持する。結合度測定部23は、車上子3に測定用信号を出力して、結合度を測定する。金属片141の位置を可変とし、結合度測定部23を備えるから、調整制御部21が、結合度の測定値に基づいて金属片141の位置を制御することによって、自動的に結合度を設定値に調整することができる。したがって、結合度試験器を必要とすることなく、適当かつ正確に結合度を変化させ、車上子の検査を行なうことができる。
(もっと読む)
121 - 140 / 334
[ Back to top ]