
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
2,081 - 2,100 / 12,590
情報提供システム、情報提供装置、情報提供方法およびプログラム
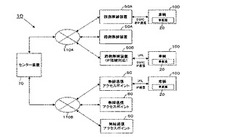
【課題】情報が配信されたときに、その配信された情報の一部を提示して、所望の情報のみをユーザに対して表示すること。
【解決手段】狭域通信方式で通信する無線装置50A、50Bを介してセンタ−装置70から配信されたコンテンツ情報を受信する通信部と、コンテンツ情報を出力する出力部と、出力部に所定の情報提供条件を満たしたときにコンテンツ情報を出力させる制御部と、有する情報提供装置であって、制御部は、コンテンツ情報の要約を生成する要約情報生成部と、コンテンツ情報の受信を通知するコンテンツ情報受信通知部と、コンテンツ情報の要約とともに出力され、コンテンツ情報の詳細を出力するか否かを入力する詳細情報出力要否入力部と、を有する車載器20とする。
(もっと読む)
衝突推定装置及び衝突推定プログラム

【課題】カーブ路等において対向車両と衝突する可能性の有無を適正に推定する。
【解決手段】衝突推定ECU1は、予め設定された所定のタイミングにおける自車両の進行方向、及び、対向車両の相対位置に基づいて、座標上に、衝突の可能性の判断基準となる仮想的なセンターラインである仮想センターラインを規定する基準線を、自車両と前記対向車両との間に生成する基準線生成部106と、検出された進行方向、進行速度、及び、検出された相対位置に基づいて、座標上での対向車両の位置を求める第1位置算出部107と、求められた対向車両の位置に基づいて、対向車両が仮想センターラインを超えて走行車線側に進入したか否かを判定する第1進入判定部109と、走行車線側に進入したと判定された場合に、対向車両と衝突する可能性があると判定する可能性推定部111と、を備える。
(もっと読む)
行動推定装置、プログラム
【課題】本発明は、行動推定装置において、誤検出である場合に安全制御の実行を低減可能とすること。
【解決手段】行動推定システムでは、推定行動検出処理を実行することにより、撮影画像から検出した検出特徴点を行動推定モデルそれぞれと照合し、一致度合いが最も高い行動推定モデルに対応する特定行動を推定行動として検出する(S130)。そして、画像処理プロセッサに入力される操作信号(即ち、確定行動の検出結果)、及び推定行動の検出結果に基づいて、モデル信頼度算出処理により算出されたモデル信頼度が規定閾値よりも低ければ(S150:NO)、推定行動検出処理での安全制御処理の実行を禁止する(S180:NO)。つまり、行動推定システムでは、自車両の運転者に対して行動推定モデルが合致しなければ、即ち、モデル信頼度が低いほど、安全制御処理の実行を制限している。
(もっと読む)
車両の検出方法及び装置
【課題】検知エリア内の車両を確実に追尾することができる車両の検出方法及び装置を提供する。
【解決手段】本発明に係る車両の検出方法は、検知エリアSの入口に初期検知エリアPを設定し、レーザ光Lの第n次走査結果(nは1以上の整数)から初期検知エリアPに存在する車両1を追尾対象車両1xと設定するとともに追尾対象車両1xの初期位置を把握し、初期位置から追尾サーチエリアCを設定し、レーザ光Lの第n+1次走査結果から追尾サーチエリアCに含まれる車両1cを追尾対象車両1xと同一車両であると判断する。
(もっと読む)
交通監視装置及び交通監視方法
【課題】カメラの状態を監視管理することにより、画像処理の性能を低下させることなく交通状況を安定して自動監視することができる。
【解決手段】カメラ11は、道路上を撮影可能な位置に設置される。カメラ情報記録装置12は、カメラ11の状態を判別するための基準となる基準画像を予め格納する。カメラ監視装置14は、カメラ11によって撮影された監視画像及びカメラ情報記録装置12に格納されている基準画像を比較し、当該監視画像及び基準画像間の輝度差を算出することによって差分画像を取得する。カメラ監視装置14は、取得された差分画像に基づいて、カメラ11の状態を判別する。カメラ管理装置15は、カメラ監視装置14によって判別されたカメラ11の状態に基づいて、当該カメラ11を管理する。
(もっと読む)
信号待ち行列情報生成装置、コンピュータプログラム及び信号待ち行列情報生成方法
【課題】渋滞時等の信号待ち行列に関する情報を車線に対応させて精度良く予測することができる信号待ち行列情報生成装置、コンピュータプログラム及び信号待ち行列情報生成方法を提供する。
【解決手段】車線交通量算出部12は、車両感知器で計測した交通量を用いて、車線毎の到着交通量を算出する。プローブ車両情報特定部14は、通信部11を介してプローブ車両から取得したプローブ情報を用いて、プローブ車両が車両感知器の感知領域を通過した時刻、信号待ち行列の末尾に到達した時刻及び到達位置を特定する。行列末尾情報生成部15は、プローブ車両が車両感知器の感知領域を通過した時刻、信号待ち行列の末尾に到達した時刻及び到達位置を用いて、任意の時刻に車両感知器の感知領域を通過した車両が信号待ち行列の末尾となる時刻、末尾となったときの信号待ち行列の末尾の位置を算出する。
(もっと読む)
渋滞情報生成装置、コンピュータプログラム及び渋滞情報生成方法
【課題】交差点での渋滞状況に関する渋滞情報を精度良く生成することができる渋滞情報生成装置、コンピュータプログラム及び渋滞情報生成方法を提供する。
【解決手段】行列末尾情報生成部15は、プローブ車両が車両感知器の感知領域を通過した時刻、プローブ車両が信号待ち行列の末尾に到達した時刻と到達位置を用いて、車線毎に、任意の時刻に車両感知器の感知領域を通過した車両が信号待ち行列の末尾となる時刻、末尾となったときの信号待ち行列の末尾位置(信号待ち行列の長さ)を算出する。旅行時間算出部16は、信号待ち行列の末尾位置を用いて、車線毎の平均旅行時間を算出する。信号待ち回数算出部17は、信号待ち行列の末尾位置を用いて、車線毎の平均信号待ち回数、信号待ちの確率を算出する。渋滞確率算出部18は、信号待ち行列の末尾位置を用いて、車線毎の渋滞確率を算出する。
(もっと読む)
緊急車両優先制御装置、コンピュータプログラム及び緊急車両優先制御方法
【課題】緊急車両が交差点を優先的に通過するように交差点に設置された信号機の信号表示を制御するための制御情報を生成する緊急車両優先制御装置、コンピュータプログラム及び緊急車両優先制御方法を提供する。
【解決手段】行列長判定部16は、車線毎の信号待ち行列の行列長の最大値又は平均値などを算出し、算出した全車線の行列長が所定長より長いか否かを判定する。車線選択部17は、行列長判定部16で全車線の行列長が所定長より長いと判定した場合、全車線の中から少なくとも1つの車線を選択する。優先制御情報生成部19は、選択された車線の行列長を所定長より短くすべく信号表示を制御するための制御情報を生成する。
(もっと読む)
センタ装置、車載器、コンテンツ情報配信方法、コンテンツ情報処理方法及びプログラム
【課題】コンテンツとその関連情報とを含む情報グループをDSRCで受信するITS車載器17において、コンテンツを的確に再生できるようにする。
【解決手段】関連情報には有効期限の他に有効期限前再生禁止フラグ及び有効期限後再生禁止フラグを含ませる。コンテンツの再生指示を受け付けると、該コンテンツの有効期限を調べる。現在が有効期限前又は後となっていれば、有効期限前又は有効期限後の再生処理ルーチンを実施する。有効期限前再生処理ルーチンでは、有効期限前再生禁止フラグがセットされていれば、再生画面に代えて、有効期限前のため表示できない旨を表示する(S114)。セットされていなければ、有効期限前である旨付き該コンテンツの再生画面を表示する(S112,S113)。
(もっと読む)
プローブデータ収集システム、プローブデータ収集方法、プログラムおよびプログラム記録媒体
【課題】予め、カーナビ等の車載機で、目的地、走行ルート、通過予想時刻等が設定されていない車両を対象とするとともに、同様の走行データの重複収集を防止する。
【解決手段】交通情報生成サーバが、任意の区画に分割され、それぞれの区画について固有のIDが付された地図情報に基づいて、各車両の車載機器から直前の位置情報と現在の地図IDに入ってから所定時間経過後の位置情報である現在の位置情報とを受信し、その受信した直近の地図IDの位置情報と現在の地図IDの位置情報とから進行方向の地図IDを推定して、リンクIDを通過する見込みのある車両を特定して、その特定した車両にプローブデータの収集を指示する。一方、特定した車両の車載機器が、プローブデータの収集指示を受信し、リンクIDを設定し、該当するリンクIDの通過時間を計測し、平均速度を算出する。そして、リンクIDと、当該区間を通過したときの時刻情報と、平均速度とを交通情報生成サーバに送信する。
(もっと読む)
乗物搭載用監視装置
【課題】乗員に対して、衝突に注意すべき注意物体以外に不要な注意を喚起することなく、注意物体の存在、位置および外形を適切に知らせることができる乗物搭載用監視装置を提供する。
【解決手段】本発明に係る乗物搭載用監視装置1000は、乗物周辺を被写体として撮像して画像信号を生成するカメラ10と、カメラ10により撮像された画像に映る物体の中から、乗員が衝突に注意すべき注意物体を、物体の乗物に対する接近の態様に基づいて検知する注意物体検知部20と、注意物体検知部20が注意物体を検知したとき、注意物体に対応する領域以外の領域を、注意物体に対応する領域と比較して目立たなくする画像処理を行う画像処理部30と、画像処理部30により画像処理が行われた画像を表示するモニター40とを備えている。
(もっと読む)
車両用警報装置
【課題】 従来よりも適切に安全運転を支援することのできる車両用警報装置を提供すること
【解決手段】 自車両の前方物との距離を検出する車間距離測定器22と、自車両の速度を検出する速度検出手段と、マイクロ波を検出するマイクロ波受信器4を備え、警報手段は、マイクロ波受信器によって所定のマイクロ波が検出された場合にマイクロ波検出警報を報知するマイクロ波警報報知機能と、車間距離測定器で検出された自車両の前方物との距離と速度検出手段によって検出した自車両の速度とに基づき車間警報を報知する車間警報報知機能とを有する。そしてマイクロ波警報報知機能による報知と車間警報報知機能による報知を異なる態様で行うようにした。
(もっと読む)
移動物体検出装置、移動物体検出方法及びプログラム
【課題】夜間に照明を照射された静止物体を移動物体であると誤認識することのない移動物体検出装置を提供する。
【解決手段】制御部290は、カメラ100が撮影する画像のうち、昼間の駐車場の第1の背景画像BI1と現在の駐車場の第2の背景画像BI2とを予め記憶部230に記憶する。制御部290は、現在の駐車場の画像PI(現在画像PI)と、第2の背景画像BI2及び第1の背景画像BI1それぞれとの差分を示す注目画像I1,I2を生成する。制御部290は、注目画像I2のうち所定の画素値以下の画素値を有する画素のみで構成される注目画像I3を生成する。そして、制御部290は、注目画像I1とI3とを合成し、所定の画素値以上の画素値を有する画素から構成される画像に基づいて車両Vを検出する。
(もっと読む)
環境負荷評価支援システム、環境負荷評価支援方法及び環境負荷評価支援プログラム
【課題】自動車の走行における二酸化炭素の排出量の現状把握及び削減に対する評価を支援するための環境負荷評価支援システム、環境負荷評価支援方法及び環境負荷評価支援プログラムを提供する。
【解決手段】環境負荷評価支援サーバ20のサーバ制御部21は、収集したサンプルデータをショートトリップに分解し、速度パターンの評価、ショートトリップ分析を行なう。ここでは、走行状態グループ毎に出現頻度が等しい典型的な代表速度パターンを特定し、代表走行パターンを生成する。次に、クライアント端末10は、入力された運行情報に基づいて、対応する代表速度パターンを特定し、走行速度の時系列変化、トルクの時系列変化を推定し、二酸化炭素排出量を推定する。更に、デジタルタコグラフデータを取得したクライアント端末10は、急発進や波状走行を特定し、環境負荷を軽減した代表速度パターンに置換して、環境負荷を対比する。
(もっと読む)
車両周辺表示装置
【課題】指標線を認識しやすい周辺表示装置を提供する。
【解決手段】車両に設けられた撮影装置により撮影された車両の周辺画像を取得する画像取得部と、車室内に設けられ周辺画像を表示する表示装置と、運転者による運転操作の際に、運転者の指標となる指標線50aを、指標線50aに隣接する側面部50bと側面部50bに隣接する影部50cとを付して周辺画像に重畳表示させる指標線出力部とを備える。
(もっと読む)
自動車側処理装置及び基地局用処理装置
【課題】 サービスエリア30の利用のために、高速道路本線31から入り口道路32を経て駐車場33へ向かおうとする自動車10のドライバーに対し、路車間の狭域無線通信を利用して、有益な情報を配信する。
【解決手段】 基地局23は、例えば本線側地点40、入り口道路地点41及び駐車場地点42に設置される。入り口道路地点41の基地局23は、高速道路本線31から入り口道路32へ進入してきた自動車10のDSRC付きカーナビゲーション装置15と交信し、該自動車10の車種情報を受信し、車種に対応する駐車場33の駐車区画へ導く情報を送信する。
(もっと読む)
車両制御装置
【課題】安全装置が同一地点で所定回数作動する場合に、安全装置の誤作動を適切に防止する。
【解決手段】PCSシステム2に設けられたDSS_ECU4のPCS作動部11は、ミリ波センサ5から送信された障害物情報に基づいて、検出された障害物との衝突可能性を判断し、衝突可能性があると判断すると、PCSを作動させ、ブレーキECU6、体感警報装置7、警報表示装置8及び警報音発生装置9に衝突回避制御を行わせる。そして、DSS_ECU4の作動可否部12は、同一地点においてPCSの作動が所定回数以上あると、運転者の禁止操作に基づいて、PCS作動部11によるPCSの作動の可否を判断する。このため、このため、例えば、路上周辺の構造物を路上の障害物として誤検出しているなど、PCSが同一地点において所定回数作動する場合に、PCSシステム2の誤作動を適切に防止することができる。
(もっと読む)
車両退避装置
【課題】運転者がハンドルに倒れかかってしまうような状況などであっても適切に車両を誘導することができる車両退避装置を提供すること。
【解決手段】車両の運転者の状態の異常を検知する検知し(S10)、運転者の状態が異常である場合に操舵入力を無効とし(S20)、操舵入力を無効とした状態で操舵制御によって車両の進行方向を調整し車両を退避位置まで誘導する(S22)。これにより、運転者がハンドルに倒れかかっていたりハンドルを握っており操舵系を作動させにくい状態であっても、適切な車両の退避が行える。
(もっと読む)
車線逸脱防止制御装置
【課題】車両の走行状況に応じて適切な支援レベルの操舵力を得られる車線逸脱防止制御装置を提供する。
【解決手段】車線逸脱防止制御装置を、走行状況検出手段140と、車線認識手段110と、目標横位置設定手段120と、自車両の横位置を認識する自車横位置認識手段130と、操舵機構の実ステア角を検出する実ステア角検出手段23と、自車両が目標横位置に近づく目標ステア角を算出する目標ステア角算出手段151と、第1の操舵力をステア角のフィードバック制御により設定する第1の操舵力設定手段152と、第2の操舵力を目標ステア角と車両状態量に基づいた操舵力のフィードフォワード制御により設定する第2の操舵力設定手段153と、走行状況に応じて第1の操舵力と第2の操舵力との比率を変化させて目標操舵力を設定する目標操舵力設定手段150と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段160とを備える構成とする。
(もっと読む)
行動推定装置、プログラム
【課題】行動推定装置において、使用者が実行している特定行動を検出するまでに要する時間を短縮可能とすること。
【解決手段】画像処理プロセッサが実行する行動推定処理では、撮影装置で撮影した撮影画像を取得し(S110)、熱源カメラからの熱源画像を取得して(S130)、撮影画像に写り込んだ運転者の全特徴点を抽出する(S150)。そして、熱源画像に対して、持込品検出用テンプレートそれぞれを照合して、車室内に存在する持込品を検出し、その持込品についての存在物体情報を生成する(S230)。さらに、特定行動の実行時に持込品を使用しない基本パターンと、車室内に存在する持込品を用いて実行可能な特定行動に対応する行動推定モデルとに、検出特徴点と照合する行動推定モデルを絞り込む(S250)。その絞り込まれた行動推定モデルと、検出特徴点とを照合することで、推定行動を検出している(S270)。
(もっと読む)
2,081 - 2,100 / 12,590
[ Back to top ]