
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
2,041 - 2,060 / 12,590
運転評価システム及び運転評価プログラム
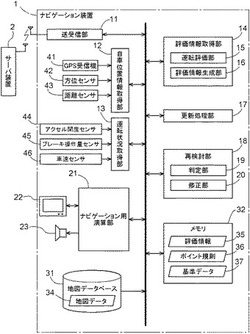
【課題】地図データを更新する際のタイムラグに起因する誤評価を抑制することができる運転評価システムを提供する。
【解決手段】地図データ34に含まれる道路特性に応じた車両の運転状況を評価し、当該評価に基づく評価結果を含む評価情報35を取得する評価情報取得手段14と、評価情報35を記憶する評価情報記憶手段32と、道路特性の変更を地図データ34に反映させるための更新データを取得して、地図データ34の更新を行う更新処理手段17と、地図データ34が更新された際に、現実の道路特性の変更時から当該道路特性の変更を反映する地図データ34の更新時までの間に取得された評価情報35が有する評価結果を、更新後の地図データ34に含まれる道路特性に基づいて再検討する再検討手段18と、を備えた運転評価システム。
(もっと読む)
停車地点情報管理装置、停車地点情報管理システム及び停車地点情報管理方法

【課題】停車地点の名称を自動付与する。
【解決手段】車両が停車した停車時刻と停車地点を含む停車情報を取得する停車情報取得部20と、時間情報を含み、利用者の行動に関する行動情報2021を取得する行動情報取得部30と、施設名称に関する単語を定義する施設辞書41を参照し、停車時刻に対応する時間情報を含む行動情報2021から施設を表す字句を抽出し、抽出された字句に対応する施設名称を停車地点の名称と推測する地点名称推測部40と、推測された名称を停車地点に付記する名称付記部50と、名称が付記された停車地点を外部に出力する出力部60と、を有する。
(もっと読む)
カーナビゲーション装置
【課題】道路をトレース中の指をタッチパネルから離すことなく、経路に関連する各種の指定操作の操作性を向上させたカーナビゲーション装置を提供する。
【解決手段】ディスプレイ部2の上面に設けられたマルチタッチパネル3に対する1点目及び2点目の各操作を信号処理部6が検出すると、ユーザ操作受付部7は1点目の道路地図上の道路のトレース操作と、トレース操作の静止中に行われた2点目のダブルクリック操作とを検出し、ディスプレイ部の表示状態を管理する地図管理表示部5は、ユーザ操作受付部が2点目のダブルクリック操作を検出するまでの1点目のトレース操作の軌跡を経路41に指定し、ユーザ操作受付部が2点目のダブルクリック操作を検出した時点の1点目の押下地点を経由地51に指定する。
(もっと読む)
ナビゲーション装置
【課題】 ユーザの行動範囲を精度よく特定することができるナビゲーション装置を提供する。
【解決手段】 ECU1は、走行データ加工処理部11において、車両の到着地点を検出し、到着地点データとして行動範囲学習部12に出力する。行動範囲学習部12では、行動範囲学習処理13において、走行データ加工処理部11から出力された到着地点データが示す到着地点および行動範囲記憶部14に記憶された代表地点に基づいて、新規代表地点を算出する。
(もっと読む)
ルート探索装置、ルート探索方法及びルート探索プログラム
【課題】ルート走行中、ルートに含まれる橋周辺で渋滞が発生した際、装置を搭載した車両が、上記橋付近に到達している場合に、ルートの再探索を行い、当該橋に対応する川に沿った道路を含む経路を提示するルート探索装置を提供することにある。
【解決手段】ルート探索装置では、ルート上の橋周辺で渋滞が発生している状況下で、走行箇所が当該橋付近である場合に、当該橋に接続する川沿いの道路を含むルートを再探索する。これにより、ルート探索装置は、渋滞を回避することができる適切なルートを提示することができる。
(もっと読む)
レーダ干渉回避装置、及びレーダ干渉回避方法
【課題】互いのレーダ装置が干渉するか否かを確実に判断でき、干渉すると判断したときに対策を講じることによって、対象物の正確な情報を測定することのできるレーダ装置を提供する。
【解決手段】他車両と無線通信することによって当該他車両に搭載されたレーダから放射される電磁波が到達する領域、及び周波数帯域などの情報と、自車両に搭載されたレーダの電磁波の到達する領域、及び周波数帯域などの情報に基づき、自車両に搭載されたレーダと他車両に搭載されたレーダとが干渉する可能性があると判断したときに、互いのレーダから放射される電磁波を干渉しない状態に変更する。
(もっと読む)
ナビゲーション装置、および、リモートコントローラを用いた施設の検索方法
【課題】ナビゲーション装置において、ユーザにとって直感的に理解しやすい操作で、
施設を検索することができるようにする技術を提供する。
【課題を解決するための手段】
本発明のナビゲーション装置100は、リモートコントローラ51からの入力を受け付けるナビゲーション装置100であって、施設の位置情報を記憶している記憶手段と、リモートコントローラ51が向けられている絶対方位θaを算出する絶対方位算出手段と、現在位置を算出する現在位置算出手段と、現在位置からみて、絶対方位θaが示す方向の所定の検索領域に位置する施設を、記憶手段から検索する施設検索手段と、検索した施設を表示する表示手段と、を備える。
(もっと読む)
ナビサーバ
【課題】ある車両と同一の燃費因子に応じた燃費が認識されていない状況でも、当該車両のユーザに対してその燃費因子に応じた燃費関連情報を提供することができるナビサーバを提供する。
【解決手段】ナビサーバによれば、複数の燃費因子により燃費を表わす各要素が定義される燃費マトリクスの要素のうち、認識済の第1車両の燃費因子により定義される第1要素が認識済の第1車両の燃費に基づいて定められる。一方、燃費マトリクスの要素のうち、未認識の燃費因子により定義される第2要素が第1要素に基づいて定められる。これにより、第2車両の複数の燃費因子が第1要素ではなく第2要素を定義する場合でも、第1車両の燃費および燃費因子の既知の関係に基づいて推定される燃費および燃費因子の関係に鑑みて、この第2車両の燃費が高精度で推定されうる。
(もっと読む)
情報提供装置
【課題】情報端末に対して、目的地までの移動経路を提示すると共に、提示した移動経路において手配可能な交通手段を手配する。
【解決手段】経路案内サービスセンタ10は、出発地と目的地を情報端末50から受信し、目的地までの移動経路を、タクシーを含む手配可能な交通手段を含めて経路探索し、探索した経路案内データを情報端末に送信する。経路案内データにタクシーによる移動経路が含まれる場合には、タクシーの手配を行うか否かを問い合わせる情報も含める。経路案内サービスセンタ10は、情報端末からタクシー予約リクエストを受信すると、タクシーの乗車場所と乗り換え予定時刻を抽出し、その場所と予定時刻と予約者氏名をタクシー予約センタ30に送信して予約手配し、予約完了の報告を受信すると、その予約完了の報告を予約をリクエストした情報端末に送信する。
(もっと読む)
瞬き状態検出装置
【課題】 画像データに基づく開眼度の経時変化の検出が途切れた場合であっても、精度よく瞬き状態を検出することができる瞬き状態検出装置を提供する。
【解決手段】 瞬き状態検出ECU1は、顔画像撮像カメラ2で撮像した画像データから検出した運転者の開眼度を検出する。ここで、開眼度の検出に欠落が生じた場合に、欠落部分の補間を行う。欠落部分の補間を行うにあたり、運転者の開眼度の経時変化を10分間分開眼度履歴として記憶しておき、この開眼度履歴の中から、欠落部部分の前後に類似する部分を探し、類似部分の前後の波形に基づいて欠落部分を補間する。
(もっと読む)
車両の視覚支援装置
【課題】車両の走行状態と道路情報を関連づけた情報として蓄積し、乗員が視認したい車両周辺の画像を選択して、表示する車両周辺の視覚支援装置を提供する。
【解決手段】前記車両の周辺を撮像する複数の撮像手段(10)と、道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態(31)を検出する走行状態検出手段(30)と、少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得されたもしくは記憶された道路情報確認手段(20)と、前記撮像された画像を選択する画像選択手段(40)と、前記選択された画像を表示する表示手段(50)と、を備え、前記画像選択手段(40)は、前記車両が前記現在位置から前記道路情報確認手段(20)によって前記走行状態(31)の変化が予想される変化予想地点へ移動しようとするときに予想される前記走行状態(31)の変化に応じて画像を自動選択する構成とした。
(もっと読む)
車両の車線逸脱警報装置
【課題】自車両が走行している車線の走行区分線を検知することで、自車両の走行環境に応じて走行安全性と頻繁な警報作動の防止との両立を図ることができる車両の車線逸脱警報装置を提供する。
【解決手段】S10の判定の結果、Noの場合、左走行区分線Laが実線で右走行区分線Laが破線か否か判定し、Yesの場合、右側方或いは右斜め後に他車両CBが走行しているか否か判定する。S19の判定の結果、右側方或いは右斜め後に他車両CBが存在しない場合、左走行区分線Laに対して第2判定ラインLd2、右走行区分線Laに対して第1判定ラインLd1を夫々設定し、S5の車線逸脱判定ステップに移行する。
(もっと読む)
車両の警報装置
【課題】乗員の視線検知と車載機器の操作状態検知とを考慮して、実際の運転状況に応じた警報作動タイミングを設定可能とできる車両の警報装置を提供する。
【解決手段】乗員の視線画像情報が読込まれ(S1)、乗員の視線が所定領域以外に向いているか否かを判定する。S3で、乗員が車載機器を操作しているか否かを判定し、Yesの場合、警報作動開始のタイミングを基準値の2秒×0.6秒に設定し、Noの場合、警報作動開始のタイミングを基準値の2秒×0.8秒に設定して(S7)、S5に移行し、以降の処理を行う。S2の判定の結果、Noの場合、警報作動開始のタイミングを基準値の2秒に設定して脇見判定を行う。
(もっと読む)
車載通信装置
【課題】車両から通信で送られる道路状況の情報内容について信頼性を確認する。
【解決手段】或る自動車2の車載通信装置4が道路状況の異常状態を検出した場合、当該異常状態は異常検知地点を通過する他の自動車2に伝達される。当該他の自動車2は、異常検知地点を通る際に、それに搭載したカメラ10等のセンサにより道路状況の情報を取得し、車載通信装置4がセンサ出力信号に基づいて異常状態の有無を確認し、確認した結果を異常確認情報としてさらに他の自動車2へ通知する。
(もっと読む)
車載器
【課題】再生中のコンテンツの画面から遷移元となりうるコンテンツの画面への遷移を可能とする車載器を提供する。
【解決手段】車載器の制御部は、遷移元及び遷移先を有する第1コンテンツの再生画面において、当該第1コンテンツの遷移先となる第2コンテンツに遷移するための遷移先ボタンを表示させるとともに、当該第1コンテンツの遷移元となる第3コンテンツが前記第2コンテンツと異なる場合に当該第3コンテンツに遷移するための遷移元ボタンを表示させる。そして、前記遷移先ボタンまたは前記遷移元ボタンに対応する操作信号が入力されたときに、操作されたボタンに対応する前記第2コンテンツまたは前記第3コンテンツの再生画面に遷移させる。
(もっと読む)
運転行動推定装置
【課題】運転者の運転行動に対して不適切な支援が行われることを抑制する
【解決手段】まず、自車両の前方を撮影した画像を取得し、撮影画像上に物体が存在するか否かを検出する(S1010)。なお以下、ここで検出した物体を前方障害物という。その後、前方障害物と自車両との間の距離Df(以下、障害物距離Dfという)を検出する(S1050)。そして、障害物距離Dfが警告距離判定値Djより大きいか否かを判断する(S1090)。ここで、障害物距離Dfが警告距離判定値Dj以下である場合には(S1090:NO)、警報禁止フラグF2を1に設定する(S1110)。これにより、一時停止地点で運転者が車両停止行動をしないと推定された場合に、一時停止するように促す旨の警告が禁止される。
(もっと読む)
運転状態監視装置
【課題】車両の走行環境の変化に伴い明るさが大きく変化した場合であっても、運転者の顔画像からの特徴点の抽出が可能な運転状態監視装置を提供する。
【解決手段】運転状態監視装置1は、撮像器10により撮像して得られた運転者の顔画像を取得する画像取得部11と、取得した顔画像を複数の領域に分割する画像分割部12と、顔画像の各領域の平均輝度が所定の輝度値に近づくように、領域に含まれる画素の輝度値を領域毎に補正する画像補正部13とを備える。画像補正部13は、領域毎に輝度値の補正を行うので、それぞれの領域の明るさに応じて適切に補正できる。また、この補正により、各領域の画素の輝度値を画像解析の可能な一定の範囲内に収束させることができる。
(もっと読む)
車両の走行支援装置
【課題】同一の撮像手段を用いて、車両の走行を支援する走行支援手段と交通信号機の信号状態を乗員に報知する報知手段とを制御可能な車両の走行支援装置を提供する。
【解決手段】自車両CAの走行中は、CCDカメラ2で撮像された画像処理領域A1から逸脱警報用の走行車線LAを画像処理し、自車両CAが信号機Sに近づいたときには、走行車線の画像処理から信号機Sの信号情報に関する信号状態報知揺の画像処理領域A2へ変更されるため、両方の画像処理の時間が短縮でき、同一のCCDカメラ2及び画像処理部12で制御可能とすることができる。
(もっと読む)
覚醒度判定装置
【課題】覚醒度判定の判定値を適切に学習する覚醒度判定装置を提供する。
【解決手段】車両を運転するドライバの覚醒度を判定する覚醒度判定装置200を、ドライバの操舵操作量又は操舵力を検出する操舵状態検出手段240と、ドライバの操舵操作量又は操舵力が所定値以下である状態の経過時間を加算するカウンタ手段と、経過時間が判定値以上となったときに覚醒度低下を判定する覚醒度低下判定手段250と、ドライバの運転状態に基づいて判定値の学習補正を行う判定値学習手段260と、自車両が走行中の道路を自車両が過去に走行した走行回数を検出する走行回数検出手段220とを備え、判定値学習手段は、走行回数が所定値以上であるときに運転状態に基づく判定値の学習補正を許可する構成とする。
(もっと読む)
車両周辺監視装置
【課題】対象物が四足動物であるか否かを高精度に認識することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、撮像画像から対象物領域として抽出された対象物が存在する領域から、第1の要素領域群および第2の要素領域群が異なる時刻において抽出されることとを要件として、当該対象物が四足動物に該当すると判定される。歩行している四足動物を横から見た場合、前脚および後脚が開いている第1の姿勢、ならびに、前脚および後脚のいずれか一方が閉じている第2の姿勢が異なる時刻で確認されることに鑑みて、前記のような判定手法により対象物が四足動物であるか否かが高精度に認識されうる。
(もっと読む)
2,041 - 2,060 / 12,590
[ Back to top ]