
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
281 - 300 / 5,473
車両位置検知システム
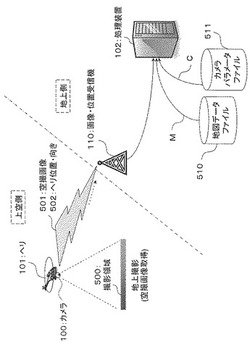
【課題】違法駐車車両を容易にかつ自動的に検知して確実に排除可能にした車両位置検知システムを得る。
【解決手段】上空側から地上を撮影した空撮画像501を取得して、空撮画像501から違法駐車の対象となる車両の位置を検知するために、空撮画像501を撮影するためのカメラ100を有するヘリ101と、空撮画像501に対応した地図データMを格納する地図データファイル510と、空撮画像501と地図データMとから車両を検知する処理装置102とを備えている。処理装置102は、空撮画像501と地図データMとの位置合わせを行う地図位置合わせ手段と、空撮画像501に存在する車両を検知する車両検知手段と、車両が駐車禁止領域に存在するか否かを判定する違法駐車判定手段とを有する。
(もっと読む)
障害物検出装置

【課題】車載カメラによる撮影画像の横断歩道部分の画像パターンの位置方向が、障害物が存在しない横断歩道部分の画像パターンである基準パターンの位置方向と合わないときにも横断歩道上の障害物を早期に検出できる技術を提供する。
【解決手段】単眼カメラ3の撮影画像の横断歩道部分の画像パターンの位置方向が、記憶手段4に記憶された歩行者が存在しない横断歩道部分の基準パターンの位置方向と合わないときには、単眼カメラ3の撮影画像の横断歩道部分の画像パターンの位置方向が基準パターンに合うように、変換処理が変換手段5aにより撮影画像のパワースペクトルに対して施される。したがって、変換処理されたパワースペクトルの基準パターンを含む横断歩道部分の画像パターンと基準パターンとの差から、単眼カメラ3により撮影された横断歩道上の歩行者11を検出手段5bにより早期に検出することができる。
(もっと読む)
障害物検知装置
【課題】障害物に明部と暗部が存在し、障害物の連続する輪郭が明部と暗部にまたがって存在する場合でも誤検知の少ない安定した障害物検知を可能とする障害物検知装置を提供する。
【解決手段】撮像画像から障害物検知のための処理画像を生成する処理画像生成部と、処理画像を複数の小領域に分割する小領域分割部と、複数の小領域と処理画像の画素値から小領域毎のエッジ閾値を設定するエッジ閾値設定部と、複数の小領域と処理画像から小領域毎の濃淡勾配値を算出し、算出された濃淡勾配値に対応する小領域のエッジ閾値を用いて、エッジ画像と勾配方向画像とを生成するエッジ抽出部と、エッジ画像内で設定されたマッチング判定領域内のエッジ画像及びエッジ画像に対応する勾配方向画像から障害物の有無を判定する障害物認識部と、を有し、小領域分割部は、自車外の照明状態に基づいて処理画像を複数の小領域に分割する障害物検知装置。
(もっと読む)
歩行者移動推定装置及び方法
【課題】歩行者の移動行動を高精度に推定することができる歩行者移動推定装置及び方法を提供する。
【解決手段】 歩行者の移動行動を推定する場合は、まずカメラによる撮像画像を画像処理して得られた画像データを入力し、その画像データから全ての歩行者を検出する。そして、各歩行者の現在の位置及び速度ベクトルから、各歩行者のt秒後の位置及び速度ベクトルを求める。次いで、ある歩行者(特定歩行者)と特定歩行者の周囲に存在する他の歩行者との距離に関するエネルギー項Iiと、特定歩行者の歩行速度に関するエネルギー項Siと、特定歩行者の目的地に関するエネルギー項Diとを求め、各エネルギー項Ii,Si,Diと重み係数λ0〜λ2とを用いて、特定歩行者についてのエネルギー関数Eiを求める。次いで、そのエネルギー関数Eiに基づいて特定歩行者の進路を予測する。
(もっと読む)
車両の走行支援システム及び方法
【課題】交差点において安全且つドライバーの意思に沿った車両の走行支援を行う。
【解決手段】走行支援システム(1)は、交差点における車両の走行を支援する。走行状態を検出する走行状態検出手段と、運転操作情報を検出する運転操作情報検出手段と、交差点情報を検出する交差点情報検出手段と、検出された走行状態、運転操作情報及び交差点情報を関連付けて、走行パターンとして記憶する学習手段と、検出された交差点情報が学習済み走行パターンに含まれる交差点情報と同一又は類似である場合に、当該学習済み走行パターンに従って、車両を制御する制御手段とを備える。
(もっと読む)
動画記憶システム
【課題】車両の挙動から動画データを構成する画像データを検索することができる動画記憶システムを提供すること。
【解決手段】データ作成部15は、車室外カメラ12から複数の画像データから構成される動画データを取得し、GPS受信機11から車両の位置データを取得し、第1車載ECU18a〜第3車載ECU18cから複数の画像データにおける少なくとも一部の画像データに対応する車両の少なくとも一種類の挙動を示す車両データを取得しる。そして、複数の画像データを含み、車両データを車両データに対応する画像データに関連付け、車両データを検索キーとして処理済動画データを作成し、作成した処理済動画データを記憶部14に記憶する。
(もっと読む)
運転支援表示装置
【課題】運転者にとって、現在車速が適正かどうかを余裕を持って確認でき、且つ、直感的に分かりやすい運転支援表示装置を提供する。
【解決手段】前方道路の形状、現在車速Vcurを逐次取得し、それらから理想走行軌跡32および予測走行軌跡33を逐次更新しつつ、車両走行中、常時、理想走行軌跡32と予測走行軌跡33とを表示器30に表示する。現在車速Vcurが前方のカーブを安全に走行するための理想的な速度である場合や、その理想的な速度をやや超えている程度であり、危険と判断するほどではない場合にも、理想走行軌跡32と予測走行軌跡33を表示器30に表示することになる。そのため、運転者は、運転操作に余裕のあるときに表示を確認することができる。また、現在車速Vcurが適正かどうかを理想走行軌跡と予測走行軌跡とのずれから判断することができるので、直感的に分かりやすい。
(もっと読む)
無線タグシステム
【課題】案内情報などが登録されて屋外や屋内の適所に分散配置される多数のパッシブRFタグの位置情報を、タグリーダを用いて管理サーバへ簡単に登録できるようにした無線タグシステムを提供する。
【解決手段】タグ管理サーバは、タグリーダからパッシブRFタグの識別子a-IDの記述された画像要求を受信(S701)し、この画像要求に記述されたa-IDと対応付けられた周辺画像を探索(S704)し、周辺画像を検索できれば当該画像の添付された画像応答を返信(S706)する一方、周辺画像を検索できなければ画像の添付されていない画像応答を返信(S707)し、新規登録するパッシブRFタグの位置情報が記述されたタグ登録要求を受信(708)し、タグ登録要求に記述された位置情報に基づいてデータテーブルを更新(S712)する。
(もっと読む)
車両用運転支援装置
【課題】信号待ちで停車中の先行車が発進し、後続する車両が追従発進する場合であっても、現在の信号灯色が赤色或いは黄色の場合は、先行車発進報知は行わず、不必要な支援情報の提供を省略することで、運転者に与える煩雑感を軽減する。
【解決手段】信号灯色が赤色或いは黄色と判定され(S3)、且つ信号待ちの先行車が発進と判定され(S7)、且つ先行車が先頭車と判定された(S8)場合、運転者に対して先行車発進報知は行わない(S9)。一方この状態から自車両が発進しようとした場合は(S10)、信号灯色が赤色或いは黄色である旨の注意を促す支援情報を運転者に報知する(S12)。
(もっと読む)
センサコントローラ、ナビゲーション装置、センサ制御方法
【課題】 従来、ナビゲーション装置では、カメラ等のセンサを複数用いて、車両の周囲の情報を検知し、運転者の運転を支援する技術があるが、複数のセンサによる検知結果を用いて複雑な演算処理を行うために、処理負荷が高くなり、即応性が必要な他の処理が遅延してしまうこともある。そのため、センサで検知した情報について、処理範囲を一律に縮小させることで、演算処理量を減らして処理負荷を下げることが考えられている。しかし、一律に処理範囲を縮小すると、運転支援に必要な情報が得られないことがある。
本発明の目的は、運転の支援に必要な情報をより適切に得るセンサ制御技術を提供することにある。
【解決手段】
本発明のセンサコントローラは、車両の走行状況に応じて、センサにより取得した情報の処理範囲を変更させて所定の処理を行うことを特徴とする。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】渋滞時における追従走行において、無駄な加減速を低減することが可能な車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】渋滞先頭距離計測装置16が、渋滞先頭JHの位置からの自車両100の先行車200Pの位置を判定し、車両制御ECU18が、渋滞先頭距離計測装置16が判定した渋滞先頭JHの位置からの先行車200Pの位置に基づいて、先行車200Pの挙動を予測する。加減速度発生装置20は、車両制御ECU18が予測した先行車200Pの挙動に基づいて、先行車200Pに対して自車両100を追従走行させる。そのため、単なる先行車200Pの瞬間的な挙動への対応ではなく、渋滞先頭位置からの先行車200Pの位置に基づいて予測される先行車200Pの挙動に対応して、自車両100を追従走行させることとなるため、自車両100の無駄な加減速を低減することができる。
(もっと読む)
信号機の点灯状態判断システム及び車両の走行支援システム
【課題】交差点において安全且つドライバーの意思に沿った信号機の点灯状態の判断を行う。
【解決方法】信号機の点灯状態判断システム(1)は、赤色、黄色及び青色の灯器並びに矢灯器を有する信号機の点灯状態を判断し、点灯状態を検出する手段(3、10)と、矢灯器に付随して黄色の灯器が点灯する場合、当該黄色の灯器の点灯タイミングの前後における点灯状態に基づいて、当該黄色の灯器を青色又は赤色の灯器であると判断する手段(10)とを備える。
(もっと読む)
車両入退場管理システム
【課題】車両ナンバープレートが泥で汚れたりした場合でも、確実に車両ナンバープレートを認識すること。
【解決手段】車両ナンバープレート10の文字群を文字群毎に認識する文字認識部21と、車両ナンバープレートの複数の登録情報が予め格納してある車両登録データベースAと、文字認識部21による車両登録番号1の認識結果を基に、前記車両登録データベース内を検索する検索部28と、検索部28による検索の結果、抽出された登録情報を候補として記憶する候補抽出リストテーブルBと、車両登録番号1以外の他の文字群の認識結果によって、前記候補抽出リストテーブルB内の各登録情報について重み付けをして、その内の一つを登録車両と判定する。
(もっと読む)
車両周辺監視装置
【課題】俯瞰映像上の障害物を強調して表示し、前記俯瞰映像上で歪んで表示される障害物の把握を容易にした車両周辺監視装置を提供すること。
【解決手段】一定の時間間隔ごとに俯瞰映像を取り込み、特徴点抽出処理部3において特徴点Pを抽出する。そして、前記抽出した特徴点Pの動きを特徴点追跡処理部4において追跡処理する。この特徴点Pの追跡処理では、特徴点Pのオプティカルフローを計算することでその動きベクトルを求める。次に、三次元計測処理部5において俯瞰映像上の特徴点Pの位置の変化から自車両と特徴点Pとの相対運動情報と、前記特徴点Pの三次元座標情報を算出する。さらに、前記算出した前記相対運動情報と前記三次元座標情報とから障害物検知処理部6において障害物を検知し、前記検知した障害物を含む前記俯瞰映像上の領域を強調領域描画処理部8において決定し強調し、表示部10により表示出力する。
(もっと読む)
対象物追跡装置及びプログラム
【課題】対象物が路面に接する接地位置が撮影範囲から外れたり、遮られたりしている場合であっても、自車両の直近まで対象物を追跡して、精度よく対象物の路面上の位置を推定する。
【解決手段】対象物検出部42で、過去の撮像画像から求められた対象物の路面上の位置、及び車両運動情報に基づいて、現在の対象物の路面上での位置を予測して、対応する現在の撮像画像上の位置に検出枠を設定することで対象物を検出し、第1の位置推定部48で、検出枠範囲判定部44で検出枠の下側領域が撮影範囲内であると判定された場合に、検出枠内の画像の足元位置に基づいて、対象物の現在位置を推定し、第2の位置推定部50で、検出サイズ判定部46で検出枠のサイズが予め定めた大きさ以上であると判定された場合に、過去の撮像画像における対象物に対する現在の撮像画像における対象物の拡大率に基づいて、対象物の路面上の現在位置を推定する。
(もっと読む)
道路曲率推定装置
【課題】自車両が進行する道路の曲率を正確に推定可能とする道路曲率推定装置を提供する。
【解決手段】自車両の前方の道路の曲率を推定する道路曲率推定装置であって、自車両の前方を走行する先行車の走行軌跡を算出する先行車軌跡検出手段と、自車両の前方を写した前方画像を撮像する撮像手段と、先行車が車線変更したか否かを、前方画像中における先行車および白線の位置関係に基づいて判定する車線変更判定手段と、先行車が車線変更中である場合、先行車の走行軌跡を当該車線変更先の車線に沿うように補正する先行車軌跡補正手段と、先行車の走行軌跡に基づいて道路の曲率を推定する曲率推定手段とを備える道路曲率推定装置である。
(もっと読む)
運転支援装置
【課題】運転者の違和感を抑制しつつ運転者の視野を広げて運転者の利便性を向上させることができる運転支援装置を提供する。
【解決手段】運転支援装置は、車両の周囲を撮像する撮像部と、前記撮像部により撮影された画像を、運転席に着席した乗員の視点を仮想視点として見た車両の周囲の画像に変換すると共に、前記仮想視点を中心として視覚方向を連続的に変化させた連続画像を生成する画像生成部と、前記画像生成部により生成された前記連続画像を表示する表示部と、を備える。
(もっと読む)
車両制御装置
【課題】 ドライバに与える違和感の少ない運転支援を実現できる車両制御装置を提供する。
【解決手段】 車両制御用のアクチュエータ(エンジン15、制動制御装置)を備えた車両に搭載され、自車両の進行方向前方の走行環境を計測する走行環境計測部(カメラ1a,1b)と、走行環境計測部による走行環境の計測結果の信頼度(存在信頼度)を判定する信頼度判定部22と、判定された信頼度を必要条件としてアクチュエータの作動を行うコントロールユニット2と、を備えた。
(もっと読む)
運転支援装置
【課題】運転者の違和感を抑制しつつ的確な安全確認支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置は、車両の周囲を撮像する撮像部と、前記撮像部により撮影された画像を、車室内に設定された仮想視点から見た車両の周囲の画像に変換すると共に、前記仮想視点を中心として視覚方向を連続的に変化させた連続画像を生成する画像生成部と、前記画像生成部により生成された前記連続画像を表示する表示部と、シフトポジションが、前進走行のレンジ又は後退走行のレンジに切り替えられた場合に、前記表示部に前記連続画像を表示させる制御部と、を備える。
(もっと読む)
画像認識システム、方法、及び、プログラム
【課題】処理量で、対称線分図形を検出することができる画像認識システムを提供する。
【解決手段】検出対象の対称線分図形は、左右対称であり、垂直線分対と斜線分対とを有する。垂直線分対検出手段22は、対称線分図形を含む入力画像から、垂直線分対上を通る一対の垂直線を検出する。中央線検出手段23は、検出された一対の垂直線の中央を通る中央線を検出する。対称斜線分対検出手段24は、検出された中央線上の切片をパラメータの1つとした直線パラメータ表現に基づき、入力画像から、斜線分対上を通る一対の斜線を検出する。判定手段25は、入力画像における、検出された一対の垂直線及び斜線の周囲に対応する領域内の画素と、周囲外の領域の画素とに基づいて、対称線分図形の存在の有無を判定する。
(もっと読む)
281 - 300 / 5,473
[ Back to top ]