
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
201 - 220 / 5,473
幹線路合流情報提供システム
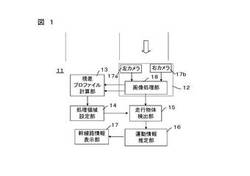
【課題】合流地点近くの側路にいる車両が適切かつ円滑に幹線路の流れに合流することが可能な、合流情報提供システムを提供すること。
【解決手段】本発明の幹線路合流情報提供システムは、側路と合流する幹線路上に設けられた2つのカメラにより合流地点へ向かう走行物体の時系列画像を取得し、この時系列画像上で垂直位置と前記監視領域の平面上での視差との関係を表す視差プロファイルを計算する。この視差プロファイルに基づいて、カメラから得られる画像に複数の処理領域を設定し、設定された複数の処理領域から検出された走行物体の大きさの変化、複数の処理領域の間隔から走行物体の速度を算出する。
算出された走行物体の速度から幹線路の状態情報を検知し、側路上に車両に対して表示する。
(もっと読む)
車両周辺画像提供装置

【課題】トップビュー画像のつなぎ目と交差するガイドラインを違和感なく表示させることが可能な「車両周辺画像提供装置」を提供すること。
【解決手段】車両周辺画像提供装置は、表示手段と、複数のカメラと、車両の画像のデータを予め格納する第1の記憶手段と、車両の幅及び車両からの所定の距離を示すガイドラインのデータを記憶する第2の記憶手段と、第1の記憶手段に格納されているデータから車両の画像と車両周辺の画像を合成して表示手段の画面に表示させるように制御する制御手段とを備える。制御手段は、各カメラにより取得された画像間の境界領域に表示されるつなぎ目と交差するガイドラインを表示するとき、ガイドラインの表示位置の画素と表示位置に隣接する画素との輝度差に応じて現れる滲みを含めたガイドラインの表示がつなぎ目の両側でずれのないようにガイドラインの表示位置を調整する。
(もっと読む)
車両の衝突を回避するための装置
【課題】自車両の移動物体の進行経路までの距離をより良好な精度で推定して衝突可能性の判定精度を向上させる。
【解決手段】車両の周辺の物体を検出し、検出された物体のうち、該車両の進行経路に向けて接近してくる移動物体を判定する。移動物体の進行経路に沿って存在する白線および縁石の少なくとも一方を検出する。車両から、該検出された白線および縁石の少なくとも一方までの第1の距離dlに基づいて、該車両から該移動物体の進行経路までの距離dtを推定する。推定した距離dtに基づいて、車両が移動物体と衝突する可能性を判定し、該衝突の可能性の判定結果に基づいて、衝突回避のための動作を発動する。
(もっと読む)
障害物認識装置
【課題】撮影画像に含まれた障害物側面の端をエッジヒストグラムを用いずに正確に認識できる技術を提供する。
【解決手段】自車両1に搭載され、自車両1周辺を撮影する単眼カメラ3により撮影された撮影画像が、路面に垂直な仮想面に射影した側面視の画像に変換手段6aにより変換されて、側面視の画像に含まれた障害物側面の端が検出手段6bにより検出されるため、撮影画像に含まれた障害物側面の端を水平エッジヒストグラムを用いずに正確に検出することができる。
(もっと読む)
車両表示装置および表示方法
【課題】 後方画像に死角が生じていることを知らせることができる「車両表示装置および車両表示方法」を提供する。
【解決手段】 本発明の車両表示装置は、車両後方を撮像しその後方画像を表示するものであって、車両の後方を撮像する撮像カメラ110と、撮像カメラからの撮像データに基づき後方画像をディスプレイ140に表示可能な出力制御部130と、撮像データに基づき自車が斜め駐車されたか否かを判定する駐車方向判定部132と、斜め駐車と判定されたとき後方画像において死角が生じる方向を判定する死角方向判定部134とを有する。出力制御部130は、斜め駐車と判定されたとき、死角方向判定部の判定結果に基づき死角が生じることおよび死角の方向を知らせる表記210、220を、後方画像200上に合成して表示させる。
(もっと読む)
車両用周辺監視装置
【課題】本発明は、運転者への不要な障害物検出通知を抑制することを課題とする。
【解決手段】車外の画像を撮像する撮像手段と、車両の運転者の視線の方向を検出する視線検出手段と、車両のハンドルの操舵角方向を検出する操舵角検出手段と、前記撮像手段によって撮像された画像に基づいて障害物を検出する障害物検出手段と、前記障害物検出手段によって、前記視線検出手段によって検出された運転者の視線の方向から外れた所定範囲内に障害物が検出され、且つ運転者の視線の方向と前記操舵角検出手段によって検出されたハンドルの操舵角方向とが一致する場合に、障害物の存在を車両の運転者に通知する通知手段と、を備えている。
(もっと読む)
物体検出装置および運転支援システム
【課題】周囲に存在する物体の部分のうち最も近接する位置にある部分までの距離の情報を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、代表距離算出手段12が算出した各代表距離znをグルーピングして物体を検出する物体検出手段13を備え、物体検出手段13は、検出した物体の手前側に探索領域Rを設定し、探索領域R内での個々の距離zの情報の分布に基づいて、探索領域R内に物体の一部Bが存在すると判断した場合には、元の当該物体までの距離の情報Zと検出した当該物体の一部までの距離の情報Zbとの差分ΔZを算出して当該物体の情報に対応付け、当該物体の情報に差分ΔZが対応付けられている場合には、検出した当該物体までの距離Zから差分ΔZを差し引いた値を新たに当該物体までの距離Znewの情報として算出して出力する。
(もっと読む)
有料道路の料金収受システム
【課題】通行券の悪用を防止する利便性の良い有料道路の料金収受システムを提供することを目的とする。
【解決手段】有料道路の入口料金所においてETC車両である後続車両が、非ETC車両である先行車両に対して発行された通行券の抜き取りが検知される前に入口車線への入線を検知した場合に、先行車両及び後続車両の車両番号を発行された通行券の通行券IDと関連付けて中央処理装置100の管理テーブルに登録する。
また出口料金所において当該通行券IDを有する通行券を利用者が提示した場合には、中央処理装置100の管理テーブルに問い合わせを行い当該通行券IDと関連付けて登録されている車両か否かを確認する。関連付けて登録されていないと確認された場合、当該車両の運転手に対して警告を発し、後続車両を不正補助車両として登録するため、後続車両が先行車両に対して発行された通行券を受け取って悪用することを防止することが出来る。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
車両の走行安全装置
【課題】見通しの悪い交差点等において、運転者が前方の安全を確認しようとしている場合に、運転者に衝突の可能性のある移動物体の存在を知らせる。
【解決手段】車両の走行安全装置は、車両に設けられ、該車両の周辺の物体を検出する物体検出手段と、車両の走行状態を検出するための走行状態検出手段と、検出された物体のうち、車両の進行経路に接近してくる移動物体を特定する移動物体特定手段と、運転者の前方への乗り出しの有無を判定する乗り出し判定手段と、接近してくる移動物体があり、かつ運転者が前方へ乗り出しているときに、運転者に移動物体の接近を知らせる報知手段と、を備える。
(もっと読む)
ナビゲーション装置及びレーン変更案内方法
【課題】レーン変更先の走行レーンにおける車両走行速度と自車両の走行速度との差が大きい場合であっても、運転者が安全にレーン変更を行うことが可能な「ナビゲーション装置およびレーン変更案内方法」を提供する。
【解決手段】経路案内すべき交差点から自車位置までの間に複数のレーンがある道路が含まれている場合であって、かつ、複数の走行レーンのうち互いに隣り合う各組の隣接走行レーンの中に車両走行速度の差分が所定値以上となる隣接走行レーンが存在する場合、通常のタイミングよりも経路案内のタイミングを早くするように制御することにより、レーン変更先の走行レーンにおける車両走行速度に自車両の走行速度を合わせるための距離を長く確保できるようにする。
(もっと読む)
自律走行車および自律走行方法
【課題】飛行体と連携して走行先の死角を無くし、走行できる自律走行車を提供する。
【解決手段】飛行体12が自律走行車11を観測することにより得られた自律走行車11の走行履歴と飛行体12が自律走行車11の周辺を観測することにより得られた第1の観測区画毎の自律走行車11の走行可否と第1の観測区画毎の座標とを受信する受信手段と、自車両の位置の履歴を記憶する走行履歴作成手段と、自車両の周辺を観測し、第2の観測区画毎に物体の存在有無を判定する走行可否作成手段と、飛行体12から受信した走行履歴と、走行履歴作成手段により作成された走行履歴とから座標変換行列を算出し、座標変換行列を用いて飛行体12から受信した座標を座標変換し、飛行体12から受信した走行可否と、走行可否作成手段により作成された走行可否とに基づいて、第2の観測区画毎に走行可否を算出する計算手段と、を備える。
(もっと読む)
走行支援装置
【課題】死角がある場合に適切な適正車速を設定する走行支援装置を提供することを課題とする。
【解決手段】車両に搭載される走行支援装置であって、車両前方の死角領域を検出する死角領域検出手段と、死角領域検出手段で検出した死角領域を減少する走行領域を検出する走行領域検出手段と、走行領域検出手段で検出した走行領域での適正車速を設定する適正車速設定手段を備えることを特徴とし、適正車速設定手段は、周辺環境に応じて適正車速を変更すると好適である。
(もっと読む)
車両周辺監視装置
【課題】 赤外線カメラにより温度一様表面を有するデバイスを用いることなく、グレースケール画像中の対象物の輝度(輝度値)を推定することを可能とする車両周辺監視装置を提供する。
【解決手段】
予め求めておいた路面温度Trと外気温Taの対応関係の特性102に基づき検出した外気温Taから推定される路面温度Trと、この路面温度Trに対応するグレースケール画像中の路面領域の輝度(路面輝度という。)との対応関係から、グレースケール画像中の対象物の輝度(輝度値)を推定する。
(もっと読む)
車両周囲表示装置、車両周囲表示方法
【課題】 従来、車載装置において、車両の周囲を画像として表示するとともに、コーナーセンサー等により障害物の存在を検知して、車両の周囲の画像上に当該コーナーセンサーが障害物を検知した旨の表示を行う技術がある。しかし、そのような技術では、障害物が付近に存在することを示すことはできるが、運転者は障害物の具体的な形状をイメージし難い。
本発明の目的は、運転者に車両の周囲の立体物の配置状況をよりわかりやすく示す技術を提供することにある。
【解決手段】
本発明の車両周囲表示装置は、車両の周囲を撮像するとともに車両の周囲に存在する立体物の高さを検知して、立体物の高さが車両にとって危険な高さにある場合に、画像に含まれる危険な障害物を特徴付けて表示する。
(もっと読む)
標識および標識使用方法
【課題】標識を画像処理することによって位置および方向に関する情報を得る。
【解決手段】所定箇所に設置される標識2は、軸部4と符号提示部6とを備える。球形の符号提示部6はその球面6aに、異なる複数の視線方向から識別可能な、標識2の位置を示す複数の位置情報符号と、異なる複数の視線方向のうちいずれの視線方向から標識2が視認されているかを示す方向表示と、を有する。複数の位置情報符号は方向表示を兼ねるよう配置されている。つまり、方向表示は複数の位置情報符号8の視認の態様に依存する形で定められる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
カメラ撮影画像表示装置
【課題】車外を撮影するカメラの画像をモニタに表示するに際して、カメラの撮影画像の表示と非表示が頻繁に切り換わることがないようにし、しかも車両が走行する道路の属性に応じて適切な表示と非表示がなされると共に、車両の走行環境等によっても適切な表示と非表示を行う「カメラ撮影画像表示装置」とする。
【解決手段】走行する道路の属性に対応してカメラ画像の表示標準閾値と非表示標準閾値を設定し、車両が走行する道路形状等の走行環境に対応して、表示標準閾値と非表示標準閾値とを調整するための調整値を設定して、これらの値により表示作動閾値と非表示作動閾値とを設定する。車速が非表示作動閾値よりも低い状態から高くなったときカメラの画像の表示を非表示とし、作動閾値よりも高い状態から低くなったとき、カメラの撮影画像を表示することにより、各閾値間にヒステリシス域を設けて頻繁な表示切り換えを防ぐ。
(もっと読む)
車両制御装置
【課題】状況に応じて適切な走行経路を設定することのできる車両制御装置を提供する。
【解決手段】車両周辺の物体に対する第一危険度D1を演算する第一危険度演算部21と、交通規則に対する第二危険度D2を演算する第二危険度演算部22と、を備え、第一危険度D1が所定の閾値以上になる場合、第二危険度D2が、第一危険度D1に対して相対的に下がるように演算する。すなわち、交通規則に対する第二危険度D2に比して物体に対する第一危険度D1を優先的に判断することができる。このような第一危険度D1及び第二危険度D2に基づくことによって、物体に対する危険度が高くなる状況において、物体を回避することを優先させた走行経路を設定することができる。
(もっと読む)
情報処理装置、車載装置、情報処理システム、情報処理方法、および、プログラム
【課題】ドライバー個人の生活習慣などの内的要因を考慮して、ドライバー通知を行うか否かを判断する技術を提供することを目的とする。
【解決手段】アドバイス情報を提供すべき複数の車両ごとに、当該車両の前記位置または走行経路ごとの走行回数を記録する。そして、複数の車両ごとに、当該車両の前記位置または走行回数が所定回数を超える走行経路に基づいて、通知不要領域を設定する領域設定手段と、複数の車両ごとに、複数の地点に応じたアドバイス情報を選択する選択手段とを備える、この選択手段は、アドバイス情報の選択対象となる地点が、当該車両の通知不要領域に含まれる場合は、アドバイス情報を選択しない。これにより。これにより、ドライバーの位置または走行経路の走行回数に応じたアドバイス情報を選択できる。
(もっと読む)
201 - 220 / 5,473
[ Back to top ]