
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
141 - 160 / 5,473
仮想白線設定方法、仮想白線設定装置及びそれを用いた針路変更支援装置
【課題】車両の乗員に不快感や不安を与えないようにする仮想白線設定技術を提供する。
【解決手段】前方カメラ10により、自車両の走行車線の白線及び走行車線上の自車両の走行を妨げる対象物を検出し、対象物が検出されたときに、車載レーダ30で検出した対象物と自車両との間の距離及び対象物の速度及び速度計40で検出した自車両の速度に基づき、下記式1及び式2で示す式にしたがって仮想白線を設定する。仮想白線位置=検出した白線位置+仮想白線曲げ量・・・式1、対象物の白線からのはみ出し距離をXr、回避マージンをXm、衝突時間をttc、仮想白線曲げ開始時間をttcstart、仮想白線曲げ終了時間をttcend、自車両位置より先の仮想白線を演算するための係数をαとした場合、前記式1における仮想白線曲げ量は、
とする。
(もっと読む)
窓検出装置及び車種判別装置及び窓検出方法及び車種判別方法

【課題】車両の窓を検出し、その検出結果に基づいて、車両の車種を判別する。
【解決手段】放射部111は、車両に対して放射光751を放射する。受光部115は、放射光751が車両に当たって反射した反射光754を受光する。反射位置算出部122は、放射部111が放射光751を放射してから受光部115が反射光754を受光するまでの時間に基づいて、放射光751が車両850に当たって反射した反射位置を算出する。窓検出部130は、反射位置算出部122が算出した反射位置に基づいて、車両の窓の位置を検出する。
(もっと読む)
車載撮像装置
【課題】撮像手段を車両に搭載した状態のまま、撮像手段の設定を簡単に且つ正確に確認、変更することができる車載撮像装置を提供することを目的とする。
【解決手段】車両に搭載される撮像手段2と、撮像手段2の出力画像信号の処理を行う処理手段15と、車両の機器制御装置からデータ伝送路を介して車両本体の情報を受信する通信手段10とを有し、処理手段15は、撮像手2段の現在の設定が、通信手段10で受信した車両本体の情報に対応しているか否かを判断する車載撮像装置を提供する。
(もっと読む)
走行支援装置
【課題】自動走行モードから、ドライバの運転操作に基づいて走行を行う手動走行モードへの切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、自動走行モードから手動走行モードへの切り換えを許可することができる領域である運転許可領域Aを設定する運転許可領域設定部61を備えている。運転許可領域設定部61は、自車両11の進路候補R1〜Rnと自車両11周辺の障害物12との干渉が想定されない領域である安全領域Aを算出し、算出された安全領域Aに基づいて運転許可領域Aを設定する。
(もっと読む)
運転記録装置および地図作成システム
【課題】ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供する。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
(もっと読む)
物体検出装置および物体検出方法
【課題】画像における検出対象の検出の精度を向上させることを課題とする。
【解決手段】画像センサー31によって撮像された画像情報に含まれる検出対象を検出する物体検出装置1に、画像情報に含まれる特徴点毎の実際のオプティカルフローを取得するオプティカルフロー取得部27と、ミリ波レーダー32によって測定された、ミリ波レーダー32と検出対象との間の距離および相対速度に係る情報を取得する距離・速度取得部21と、検出対象が画像センサー31によって撮像されたと仮定した場合のオプティカルフローの理論値を、距離および相対速度に係る情報に基づいて算出する理論値算出部26と、特徴点毎の実際のオプティカルフローと理論値とを比較し、実際のオプティカルフローが理論値に一致または近似する特徴点を、端点候補として抽出する検出対象抽出部28と、を備えた。
(もっと読む)
道路標示認識装置及び道路標示認識方法
【課題】走行している車線が特定車線か否かを正確かつ高速に判定することのできる「道路標示認識装置及び道路標示認識方法」を提供すること。
【解決手段】道路標示認識装置は、カメラと、カメラで撮影された画像を基に、車線マークを検出する車線マーク検出部と、カメラで撮影された画像を基に、特定の道路標示を検出する特定道路標示検出部と、自車両の走行距離を算出する走行距離算出部と、所定の距離を走行するまでに、自車両が走行する車線に特定の道路標示を検出したときに、自車両が特定の車線を走行していると判定する特定道路標示存在判定部と、を備える。車線マーク検出部は、自車両が走行している車線の右側の車線マーク及び左側の車線マークを特定し、特定道路標示存在判定部は、特定の道路標示の位置が右側の車線マークの位置と左側の車線マークの位置の間であるとき、自車両が特定の車線を走行していると判定する。
(もっと読む)
車両用運転支援装置
【課題】地理的な対象物の探索に関して、処理速度と検出精度とを高めることができる車両用運転支援装置を提供する。
【解決手段】前方監視カメラ3、GPS4、ジャイロセンサ5、制御ユニットUを利用して、ナビゲーション装置6が保有する三次元地図データとしてのボクセルBを抽出すると共に、そのボクセルBのうちから、区画線23等を含むものを抽出し、それらを前方監視カメラ3が撮影した撮影画像に組み込む。そして、その撮影画像21全域ではなく、その撮影画像21のうち、区画線23等を含むボクセルBについてのみ、区画線23等の検出処理を行う。これにより、探索領域(検出範囲)を少なくする。
(もっと読む)
運転支援装置
【課題】自車両の前方を走行する車両の挙動に応じて車間距離を自動的に延長できる機能性を向上させた運転支援装置を提供すること。
【解決手段】自車両が交差点に近づくと、交差点位置判断部11は先行車両の速度と加速度とをレーダ装置1により検出する。さらに先行車両と先先行車両との間の車間距離に応じた補正係数を読み出す。また交差点から自車両までの距離を算出し、先行車両の速度、交差点から自車両までの距離、先行車両の加速度をもとに延長車間距離特性データを参照し、自車両が交差点に接近したときの延長車間距離を読み出し補正係数により補正する。この結果、補正された延長車間距離は先行車両の加速度、先行車両と先先行車両との間の車間距離、交差点からの距離などの先行車両、先先行車両の挙動に応じて延長されたものとなる。
(もっと読む)
運転シーン判定装置、運転シーン判定方法およびプログラム、ならびに、ワークロード推定装置、ワークロード推定方法およびプログラム
【課題】 運転シーンの誤判定が発生するのを抑え、運転シーンの判定精度を高めることのできる運転シーン判定装置を提供する。
【解決手段】 運転シーン判定装置1は、車両情報と道路情報に運転シーンが対応付けられた運転シーン対応情報を記憶する運転シーンDB11と、ある運転シーンから他の運転シーンへのシーン遷移の可否を示す遷移可否情報を記憶する遷移可否DB12と、運転シーン対応情報および遷移可否情報に基づいて現在の車両情報および現在の道路情報から現在の運転シーンを判定する運転シーン判定部10を備えている。この運転シーン判定部10は、現在の車両情報および現在の道路情報に対応付けられた運転シーンが前の運転シーンから遷移可能である場合に、現在の運転シーンであると判定する。
(もっと読む)
路面形状認識装置
【課題】路面上に車線が標示されている場合は勿論、車線が標示されていない場合でも実際の路面形状を的確に検出することが可能な路面形状認識装置を提供する。
【解決手段】路面形状認識装置1は、自車両が走行する路面について位置のデータを検出して距離画像Tzを生成する距離画像生成手段6と、距離画像Tzの各水平ラインj上の距離zのデータをヒストグラムHjに投票して水平ラインjごとの代表距離zjを検出し、水平ラインjごとに代表距離zjを仮想平面上にプロットする代表距離検出手段10と、連続性を有しないと評価したプロットを仮想平面上から除外する評価手段11と、除外されずに仮想平面上に残存している全てのプロットに対して近似直線L1、L2を算出する近似直線算出手段12と、近似直線L1、L2の組み合わせを用いて路面形状モデルを生成する路面形状モデル生成手段13とを備える。
(もっと読む)
車両の周辺監視装置
【課題】取得した周辺画像に車両のピッチング補正を施す際に、ピッチング補正の開始時の基準点のずれ、あるいは各フレームでの累積誤差の影響を軽減して、適正な量のピッチング補正を施す。
【解決手段】車両に搭載され、当該車両の周辺を撮影するカメラと、カメラが撮影した画像から、車両のピッチング補正量を算出するピッチング補正量算出手段と、ピッチング補正量に基づきカメラが撮影する画像の上下方向のずれを補正するピッチング補正手段と、車両の傾斜の有無を判定する傾斜判定手段と、車両の傾斜が有ると判定される場合に、ピッチング補正量を低減するピッチング補正量低減手段と、を備える。
(もっと読む)
運転者状態推定装置及び運転者状態推定方法
【課題】運転者の有効視野角度の時間的な変化の発生要因を具体的に特定した上で運転者の状態を推定する。
【解決手段】自車両が停車中の状態が判定され、停車状態と判定された場合に視覚刺激が表示部に表示され、表示された視覚刺激が運転者により視認された場合の運転者の有効視野角度が導出されて記憶される。自車両が停車状態と判定される度に、運転者の有効視野角度が導出されるため、有効視野角度の相対的な変化量と運転者状態との関係が定められた所定の条件に応じて、運転者の状態を推定する。
(もっと読む)
画像から平面を検出する平面検出装置及び検出方法
【課題】車両の揺動が激しい場合でも、射影変換行列Hの初期値を短時間かつ正確に推定することができる画像から平面を検出する平面検出装置及び検出方法を提供する。
【解決手段】移動体の姿勢角を検出するステップと、検出した姿勢角を用いて記憶された平面の法線ベクトルnを修正するステップとを有する。法線ベクトルnを修正するステップにおいて、前時刻(t−1)における姿勢角を用いてカメラ座標系Cの法線ベクトルn(t−1)を慣性座標系Eの法線ベクトルnE(t−1)に変換し、次いで、現時刻(t)における姿勢角を用いて慣性座標系Eの法線ベクトルnE(t−1)をカメラ座標系Cの法線ベクトルn(t)に変換する。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、撮像された自車両の後方画像から駐車枠の白線と白線端点とを検出して画像表示の切換タイミングの精度を向上する。
【解決手段】制御手段9は、撮像された自車両の後方画像の歪みを補正して歪み補正画像にする歪み補正手段9Aと、撮像された自車両の後方画像を俯瞰画像に変換する画像変換手段9Bと、変換された俯瞰画像から駐車枠2の白線を検出する白線検出手段9Cと、検出された白線の白線端点を検出する白線端点検出手段9Dと、検出された白線端点と自車両との距離に基づいて表示手段8に表示する画像を歪み補正画像と俯瞰画像とのいずれかに切り換える表示切換制御手段9Eとを備える。
(もっと読む)
走行支援装置
【課題】走行支援装置において、自車両が旋回する場合に、安全に旋回できないことを早期に検出して自車両の走行を支援する技術を提供する。
【解決手段】CCDカメラ8で取得した路面ペイントの種類に基いて、自車両がこれから向かう交差点で右折又は左折の旋回を行う場合に限定できるか否かを判別する(S104)。自車両がこれから向かう交差点で右折又は左折の旋回を行う場合に限定できる場合に、ナビゲーション装置5から取得する交差点の情報と、車速センサ6が送信する自車両の速度と、に基いて、自車両の速度が安全に旋回可能な速度を超えているか否かを判別する(S106)。自車両の速度が安全に旋回可能な速度を超えていると判定された場合に、警報を発する(S107)。
(もっと読む)
車載報知メッセージ表示システム
【課題】タクシー運転者は、乗客の輸送に集中しつつも、タクシー利用者にシートベルト装着をスムーズに促し、安全な運行を推進する車載報知メッセージ表示システムを提供する。
【解決手段】メッセージ表示制御手段によって、前記各報知メッセージの表示を制御し、タクシー1が停止を判別し、前記着座判別手段が所定の座席にて利用者の着座を判別すると、当該判別された座席につき、前記シートベルト装着検知手段が装着状態を検知するまで、当該座席に対応する表示手段4a、4bにてシートベルト着用を促す第1報知メッセージを表示させる。又は、タクシー1が走行を判別し、前記着座判別手段が所定の座席にて利用者の着座を判別すると、当該判別された座席につき、前記シートベルト装着検知手段が装着状態を検知するまで、当該座席に対応する表示手段にてシートベルト着用を警告する前記第2報知メッセージを表示させるようにした。
(もっと読む)
顔特徴点検出装置および眠気検出装置
【課題】 実用化が容易であり、高い精度で表情を捉えることができる顔特徴点検出装置および眠気検出装置を提供する。
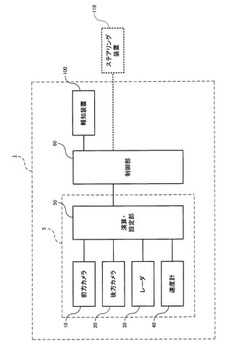
【解決手段】 眠気検出装置20は、まず、撮影装置10により運転者3の顔画像を撮影して、運転者3の顔上の特徴点を取得するときに用いる個人情報モデルにおける2D基準顔と2Dテンプレートを作成する(S1)。次に、覚醒状態における特徴点を取得し(S2)、眠気を検出するタイミングで特徴点を検出して眠気レベルを推定する(S3)。眠気レベルに応じて、居眠り防止のための装置を動作させる信号を出力する(S4)。特徴点の取得は、撮影装置10により運転者3の顔画像を撮影し、その画像を2D基準顔および2Dテンプレートを変形してフィッティングし、撮影画像から特徴点の2次元座標を取得する。次に、共通モデルである3D基準顔とフィッティングして3次元座標を求める。
(もっと読む)
安全運転サポート装置
【課題】ドライバの種類に応じた安全運転を簡易、正確、且つ十分にサポートすることが
できる安全運転サポート装置を提供すること。
【解決手段】安全運転サポート装置1は、1日の時刻毎の眠気度のパターンをドライバの
長期間にわたる勤務時間帯別に区分して設定しているので、現ドライバに合致したエンジ
ンスタート時や走行時における眠気度を判別することができ、該眠気度の判別結果に該当
する的確な安全サポートを実行することができる。よって、運転前や運転中において安全
サポートに応じた行動を現ドライバにとらせることが可能となり、安全運転を簡易、正確
、且つ十分にサポートすることができる。
(もっと読む)
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
(もっと読む)
141 - 160 / 5,473
[ Back to top ]