
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
121 - 140 / 5,473
減速支援システム
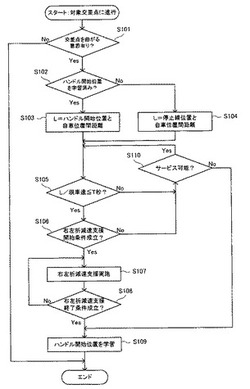
【課題】車両の運転者に違和感を与えることを抑制しつつ、減速支援を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が右折又は左折する際に、車両の運転者が、右折又は左折のためにハンドルの操舵を開始する位置である操舵開始位置を学習する学習システム(109)と、運転者の右左折意思を確認する意思確認手段(109)と、車両の現在位置と、学習された操舵開始位置との間の距離を算出可能な距離算出手段(109)と、意思確認手段によって運転者の右左折意思が確認され、且つ学習システムによって操舵開始位置が学習されている場合、距離算出手段によって算出された距離に応じて減速支援を行う減速支援手段(109)とを備える。
(もっと読む)
運転支援装置

【課題】カーナビゲーション装置を搭載していない車両であっても、交差点における一時停止を予測し、それを的確に報知することができるようにする。
【解決手段】車両制御部12は、車両に搭載したカメラユニット10で撮影した画像データに基づいて、交差点6を検出し、次いで当該交差点6に信号機3が有るか否か、停止標識4が有るか否か、停止線5が有るか否かを調べる。そして信号機3の信号灯色が赤色或いは黄色であり、或いは停止標識4が検出され、或いは停止線5が検出された場合であって、自車両1が停止線5に到達するまでの距離Lが注意報知距離L1以内で(L≦L1)、且つ車速Vが設定車速V1以上の場合、警報装置14から運転者に注意を促す警報を発生させる。
(もっと読む)
車両の後側方警報装置
【課題】自車両1の横方向変位に伴う後側方警報エリア14,15のずれによって他車両18の検出精度が低下することを防止する。
【解決手段】自車両1の位置を基準として後側方警報エリア14,15を設定し、該後側方警報エリア14,15内に他車両18が検出されたときに警報を出すようにした車両の後側方警報装置に、走行中の車線幅員Wにおける自車両位置を検出する自車両位置検出手段と、車線幅員Wにおける自車両位置に応じて後側方警報エリア14,15を横方向に変更する警報エリア変更手段とを設ける。
(もっと読む)
駐車支援装置
【課題】車両を後退させて駐車する際に適切な駐車支援を行うことができる駐車支援装置を提供する。
【解決手段】 駐車支援装置のECUは、GPSにより検出された車両位置座標と地磁気センサにより検出された車両前後方位とを読み込み、これらの車両位置座標及び車両前後方位に基づいて車両前後方向と車両進行方向との角度差δを算出する。そして、ECUは、角度差δの絶対値が所定差分閾値A2よりも大きいときは、ガイド線表示フラグをOFFにし、角度差δの絶対値が所定差分閾値A1以上であり且つ所定差分閾値A2以下であるときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをONにし、角度差δの絶対値が所定差分閾値A1よりも小さいときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをOFFにする。
(もっと読む)
覚醒支援装置
【課題】覚醒支援装置において覚醒支援開始の要否判定の妥当性を向上させること。
【解決手段】第1候補の眠気度合いが閾値未満であると判定すると(S220YES)、算出された信頼度の値が予め定められた基準値以上かを判定する(S225)。信頼度の値が基準値以上であると判定すると(S225YES)、覚醒支援を開始することなく、作動処理を終える。一方、第1候補の信頼度の値が基準値未満であると判定すると(S225NO)、第2候補が覚醒寄りかを判定する(S230)。第2候補が覚醒寄りであると判定すると(S230YES)、覚醒支援を開始することなく、作動処理を終える。一方、第2候補が居眠り寄りであると判定すると(S230NO)、要否確認処理(A)を実行する(S235)。要否確認処理において、ユーザが覚醒支援開始を希望すれば、覚醒支援を開始する。
(もっと読む)
車両用警告装置
【課題】車室内にアレルギー物質がある場合に、警告タイミングを調整することができる車両用警告装置を提供する。
【解決手段】
本発明に係る車両用警告装置1は、所定の条件下で、運転者に対して警告をだす警告部5を備える車両用警告装置であって、車室内のアレルギー物質を検出するアレルギー物質検出部3と、アレルギー物質検出部3による検出結果に応じて、警告部5の警告タイミングを決定する警告タイミング決定手段としてのECU2とを備え、警告部5がECU2によって決定された警告タイミングで警告をだすため、警告部5の警告タイミングを、車室内にアレルギー物質がある場合に調整することができる。
(もっと読む)
車載情報蓄積装置
【課題】 カメラ映像記録制御を、車両周辺監視装置から得られる周辺車両との車間距離や相対速度差といった情報と予め定められたそれぞれの基準値との比較に基づき判定される危険性(危険あり/危険なし)という物理的な事象から求められる判定結果で一意的行っているため、場面や状況によってはユーザにとって不必要な情報までを記録してしまう、という問題があった。
【解決手段】 本発明によれば、車両自体の複数の場面や状況を判断する場面・状況判断手段と、前記場面・状況判断手段によって判断された前記複数の場面・状況を前記所定の条件として、前記データ記録領域に記録させるデータの種類を前記データ記録手段に対して指定する取得データ切り替え手段を備えたものである。
(もっと読む)
自動駐車装置
【課題】インフラ設備が不要であり、且つ、自動走行中の演算処理負荷も少ない自動駐車装置を提供する。
【解決手段】車両が駐車完了位置に位置したか否かを判断する駐車完了判断手段102と、自動駐車開始条件が成立したか否かを判断する自動駐車開始判断手段108と、車両の挙動情報を、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまで逐次取得して、記憶装置120に記憶する挙動情報取得手段104と、自動駐車開始条件が成立した場合に、記憶装置120に記憶されている挙動情報に基づいて、車両が駐車完了位置に位置したと判断されてから自動駐車開始条件が成立したと判断されるまでの車両の移動軌跡を逆方向に車両を自動走行させて、車両を前記駐車完了位置まで移動させる自動走行制御手段110とを備える。
(もっと読む)
配信抑制装置、配信抑制方法および配信抑制プログラム
【課題】情報提供者のプライバシーを侵害する可能性がある情報の配信を抑制すること。
【解決手段】本配信抑制手法では、移動体Mに搭載されたカメラCによって撮影された撮影画像I2を取得する。本配信抑制手法では、第三者に対する撮影画像I2の配信を抑制するか否かを判定する。ここで、撮影画像I2には、移動体Mのドライバーの自宅が映り込んでいる。この場合、本配信抑制手法では、第三者に対する撮影画像I2の配信を抑制すると判定する。そして、本配信抑制手法では、撮影画像I2の配信を抑制すると判定された場合、配信抑制装置101からサーバ102に撮影画像I2を送信しない。これにより、情報提供者のプライバシーを侵害する可能性がある場所が映り込んでいる撮影画像の第三者への配信を抑制して、情報提供者のプライバシーを保護する。
(もっと読む)
交差点車両警告装置
【課題】交通渋滞の交差点に所定速度以上の二輪車が入ってくる状況で、対向車線から右折する車両に警告を発交差点車両警告装置を提供すること。
【解決手段】一例の交差点車両警告装置は、ある車線で交差点に進入し右折する右折車両を検知する右折車両検知手段と、前記車線に対向する車線を走行し前記交差点に進入する車両を撮影して画像を得る走行画像取得手段と、この走行画像取得手段により得られた画像から走行車両の渋滞状況を把握する渋滞状況把握手段と、この渋滞状況把握手段により渋滞が検知されたとき、前記走行画像取得手段により得られた前記画像から二輪車を検知し、検知された二輪車の速度が所定二輪車速度以上であるかを判定する二輪車速度判定手段と、この二輪車速度判定手段により前記二輪車の速度が所定二輪車速度以上と判定されたとき、前記右折車両に警告を送信する警告送信手段と、を有する。
(もっと読む)
車両周辺監視装置
【課題】そこで、本発明は、眼鏡を掛けた歩行者や帽子を被った歩行者について、歩行者であることの判定ができなくなることを抑制した車両周辺監視装置を提供する。
【解決手段】赤外線カメラの撮像画像のグレースケール画像を2値化処理して生成された2値画像から、処理対象画像部分を抽出する2値画像候補抽出手段20と、処理対象画像部分が歩行者の頭部の特徴を有するか否かを判断して、処理対象画像部分に対応する実空上の物体が歩行者であるか否かを識別する歩行者識別手段21とを備え、歩行者識別手段20は、所定範囲内の間隔をもって垂直方向に対向した二つの処理対象画像部分75,76が抽出されたときには、該間隔部分を埋めて該二つの画像部分を一体化した画像部分について歩行者の頭部の特徴を有するか否かを判断して、該二つの画像部分に対応する実空間上の物体が歩行者であるか否かを識別する。
(もっと読む)
車両制御システム
【課題】車両挙動制御装置がOFFの状態にされていた場合であっても、ドライバの覚醒度が低い場合には、ドライバによる障害物回避操作および車両安定化操作を支援できる車両制御システムを提供すること。
【解決手段】車両の挙動を制御する車両挙動制御装置を備えた車両制御システムSにおいて、障害物との接触を回避するとともに前記車両の挙動を安定化させるために前記車両挙動制御装置を制御する車両挙動制御手段と、ドライバの覚醒度を判定する覚醒レベル判定部32と、を備え、前記車両挙動制御手段は、前記車両挙動制御装置がOFFの状態であっても、前記覚醒レベル判定部32により判定された覚醒度が所定の覚醒度より低い場合には、前記車両挙動制御装置をONの状態に切り替えることを特徴とする。
(もっと読む)
走行支援装置および走行支援方法
【課題】少ない処理コストで初期位置から目標位置までの車両の走行経路を運転者に提供できる走行支援装置および走行支援方法を提供すること。
【解決手段】本実施形態では、経路パターンPT1〜PT10の組み合わせに基づいて、2m間隔で大まかに経路点Pを生成し走行経路RT1を生成しても、その後、走行経路RT1の各経路点P間に、0.05m間隔で仮想的に走行制御点Qを生成できる。よって、経路パターンPT1〜PT10に対応する各走行経路の長さCLを短く(例えば、0.05mなど)しておき、詳細に走行経路RT1を生成したり、経路パターンPT1〜PT10のパターンの種類を多数設けて記憶しておく必要が無いので、処理コストを抑制できる。従って、走行支援装置100によれば、少ない処理コストで初期位置から目標位置までの車両の走行経路RT1〜RT3を運転者に提供できる。
(もっと読む)
車載用音声発生装置
【課題】報知用の音声を鳴らす設備がない交差点において、目の不自由な歩行者に対して横断歩道の歩行を補助することが可能な車載用音声発生装置を提供することにある。
【解決手段】本発明の車載用音声発生装置は、音声発生器に対して音声の発生制御を行う音声制御部を備えている。また、車両の走行状態を示す車両情報を受信する車両情報受信部を備えている。また、車両の周辺に存在する人体の感知結果を示す感知情報を受信する感知情報受信部を備えている。また、車両の周辺を撮像した撮像画像を受信して画像解析を行う撮像画像受信部を備えている。また、車両情報において車両が停車していることが示されており、且つ感知情報において人体が感知されていることが示されており、且つ画像解析の結果において前記車両の進路上に横断歩道が存在することが示されている場合に、所定の報知音声を出力するよう音声制御部を制御する制御部を備えている。
(もっと読む)
路肩検出装置及び路肩検出装置を用いた車両
【課題】走行路面と路外との境界である路肩に白線やガードレール等の立体物がなくても、画像情報から路肩を検出する路肩検出装置を提供する。
【解決手段】入力された車外環境の三次元画像情報から対象物の有無及び自車両から対象物までの距離を算出する距離情報算出部と、算出された距離に基づく距離画像から自車両が走行する走行路面を検出する走行路面検出部と、検出された走行路面と路外との高低差を測定する高低差算出部と、測定された高低差に基づいて、走行路面と路外との境界である路肩が、走行路面より低い路外がある場合の路肩か否か判定する路肩判定部と、を有する路肩検出装置。
(もっと読む)
窓検出装置及び車種判別装置及び窓検出方法及び車種判別方法
【課題】車両の窓を検出し、その検出結果に基づいて、車両の車種を判別する。
【解決手段】放射部111は、車両に対して放射光751を放射する。受光部115は、放射光751が車両に当たって反射した反射光754を受光する。反射位置算出部122は、放射部111が放射光751を放射してから受光部115が反射光754を受光するまでの時間に基づいて、放射光751が車両850に当たって反射した反射位置を算出する。窓検出部130は、反射位置算出部122が算出した反射位置に基づいて、車両の窓の位置を検出する。
(もっと読む)
車載撮像装置
【課題】撮像手段を車両に搭載した状態のまま、撮像手段の設定を簡単に且つ正確に確認、変更することができる車載撮像装置を提供することを目的とする。
【解決手段】車両に搭載される撮像手段2と、撮像手段2の出力画像信号の処理を行う処理手段15と、車両の機器制御装置からデータ伝送路を介して車両本体の情報を受信する通信手段10とを有し、処理手段15は、撮像手2段の現在の設定が、通信手段10で受信した車両本体の情報に対応しているか否かを判断する車載撮像装置を提供する。
(もっと読む)
走行支援装置
【課題】自動走行モードから、ドライバの運転操作に基づいて走行を行う手動走行モードへの切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、自動走行モードから手動走行モードへの切り換えを許可することができる領域である運転許可領域Aを設定する運転許可領域設定部61を備えている。運転許可領域設定部61は、自車両11の進路候補R1〜Rnと自車両11周辺の障害物12との干渉が想定されない領域である安全領域Aを算出し、算出された安全領域Aに基づいて運転許可領域Aを設定する。
(もっと読む)
運転記録装置および地図作成システム
【課題】ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供する。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
(もっと読む)
案内装置、案内方法、及び案内プログラム
【課題】センサの検出範囲外から自車両に接近する他車両が存在する可能性を考慮した案内を行うことができる、案内装置、案内方法、及び案内プログラムを提供すること。
【解決手段】案内装置50は、自車両に搭載される案内装置50であって、検出範囲内の他車両を検出する他車両検出部51と、他車両検出部51によって他車両が検出されない場合に、検出範囲外に存在し、且つ対象車線に存在する仮想車両の車速を推定する車速推定部52aと、自車両の車速と車速推定部52aが推定した仮想車両の車速とに基づき、対象車線に関する案内情報を出力する出力部52bとを備える。
(もっと読む)
121 - 140 / 5,473
[ Back to top ]