
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
181 - 200 / 5,473
注視判定装置
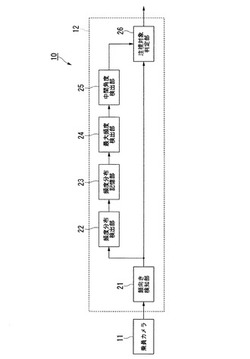
【課題】運転者の注視対象を自動的かつ的確に判定する。
【解決手段】注視判定装置10は、車両のフロントガラス両端に設けられたピラーよりも左右の外側方向の所定範囲内に対応する顔向き角度の頻度分布を検出する頻度分布検出部22と、所定範囲をピラーから左右のドアミラーに向かう方向の近傍でピラーに接する第1領域と該第1領域よりも左右の外側方向の第2領域とに区分し、頻度分布の検出結果を各第1領域及び第2領域毎に記憶する頻度分布記憶部23と、第1領域にて頻度分布が最大となる顔向き角度と第2領域にて頻度分布が最大となる顔向き角度との中間角度を検出する中間角度検出部25と、顔向き角度が各ピラーに対応する角度と中間角度との間の角度範囲に存在する場合には、注視対象がドアミラーであると判定する注視対象判定部26とを備える。
(もっと読む)
交通情報算出装置、交通システム及びコンピュータプログラム

【課題】 渋滞長の計測に使用する機器の数を節減して、設置費用や通信回線の運用費用、メンテナンスの費用を節約しつつ、渋滞長を算出することができる交通情報算出装置等を提供する。
【解決手段】 交通情報算出装置1の演算部101は、ステップS03において、記憶部に記憶している複数のアップリンク情報に基づいて、選定リンクの旅行時間c[秒]を算出する。演算部101は、ステップS04において、記憶部に記憶している複数の感知器情報に基づいて、選定リンクの単位時間内交通量b[台/秒]を算出する。演算部101は、ステップS05において、算出した旅行時間c、算出した単位時間内交通量b、記憶部に記憶している選定リンクの渋滞長内車両密度a、区間長d、非渋滞部旅行速度eに基づいて、渋滞内存在台数X[台]、渋滞長Y[m]、渋滞部旅行時間Z[秒]を算出する。
(もっと読む)
運転支援装置
【課題】タイヤの走行予測軌跡を認識できる運転支援装置を提供する。
【解決手段】車両が後退する際に運転者を支援する運転支援装置であって、車両の後方画像を撮像するカメラと、自車両の操舵角を検出する操舵角検出部と、操舵角に応じた自車両のタイヤの進路を算出し、自車両のタイヤの進路に基づく自車両のタイヤのタイヤ幅を後方に延長したタイヤ幅の軌跡の画像を生成し、カメラが撮像した後方画像にタイヤ幅の軌跡の画像を重ねた画像を生成する表示処理部と、表示処理部が生成した画像を表示する表示部と、を備える運転支援装置とする。
(もっと読む)
覚醒支援装置
【課題】覚醒支援を適切なタイミングで開始することと、ユーザに与える不快感の軽減との両立を図ること。
【解決手段】眠気度合いがThd1以上かを判定する(S210)。判定された眠気度合いがThd1以上と判定すると(S210YES)、覚醒支援開始について許可または不許可を示す情報をユーザに入力させるための画面を、タッチパネル画面に表示する(S225)。許可または不許可を示す情報の何れかが運転者によって選択されたかを、タッチパネル画面に入力された情報に基づいて判定する(S235)。許可または不許可を示す情報の何れが選択されたと判定すると(S235YES)、覚醒支援開始の許可が選択されたかを判定する(S250)。覚醒支援開始の許可が選択されたと判定すると(S250YES)、覚醒支援を開始する(S295)。覚醒支援開始の不許可が選択されたと判定すると(S250NO)覚醒支援を開始しない。
(もっと読む)
方向転換支援装置及び方法
【課題】車両の方向転換が可能か否かを運転者が精度良く判断可能なように支援する技術を提供する。
【解決手段】自車両の周囲を撮影した画像を取得し、前記画像を変換して俯瞰画像を生成し、自車両が最小回転半径で走行した場合の最小軌道を求め、自車の舵角を検出した舵角情報を取得し、前記舵角情報が示す舵角で自車が走行した場合の予想軌道を求め、前記最小軌道と前記予想軌道を前記俯瞰画像情報と重畳して表示装置に表示させる。
(もっと読む)
接近報知装置、および接近報知プログラム
【課題】自車両の接近を通行人に報知する接近報知装置において、通行人に対して必要充分な警報を行えるようにする。
【解決手段】接近報知システムにおいては、自車両周囲の通行人の位置の検出結果を取得し(S220)、予め通行人の位置と自車両および通行人が衝突する確率である衝突確率とが対応付けられた衝突確率マップを参照し、取得した通行人の位置に応じた衝突確率を抽出する(S300)。そして、抽出された衝突確率が所定の閾値よりも高い場合、警報を発する車外警報装置を作動させる(S120,S130)。つまり、常に車外警報装置31やライト32を利用して警報を行うのではなく、通行人を検出した上で、自車両と通行人との衝突確率が高い場合のみに警報を行うようにしている。よって、不要な警報が行われる煩わしさを防止するとともに、必要が警報を行うことができる。
(もっと読む)
車載装置および認知支援システム
【課題】車載装置のコスト低減を図るとともに、ドライバーの死角から自車両に接近する移動物体の検出漏れを防止しつつ、検出した移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】歪曲した受光部により広角な範囲の映像を車載装置が撮像し、撮像された映像に基づいて撮像部の設置方向および設置方向以外の方向から自車両に接近する移動物体を車載装置が検出し、検出された移動物体と自車両とが衝突する可能性を示す衝突危険度を車載装置が判定し、判定された衝突危険度に応じて移動物体の存在を報知するように車載装置を構成する。
(もっと読む)
マスク着用判定装置
【課題】ひとがマスクを着用しているか否かを精度良く判定する。
【解決手段】マスク着用判定装置10は、乗員カメラ11から出力された顔画像において水平エッジを抽出する水平エッジ抽出部21と、水平エッジの抽出結果のうちから、輝度値判定部22により水平エッジの輝度値が第1輝度値以上であると判定され、かつ、水平エッジの水平方向長さが所定値以上または水平エッジの鉛直方向高さと水平方向幅との比が所定比以下である水平エッジを選択する水平エッジ選択部23と、選択された水平エッジよりも上下方向下方の所定領域の輝度値が第2輝度値以上である場合に、ひとがマスクを着用していると判定するマスク着用判定部24とを備える。
(もっと読む)
車両用走行案内装置、車両用走行案内方法及びコンピュータプログラム
【課題】案内情報を適切に案内対象地点に重畳させて表示することが可能となるとともに運転者に案内情報を視認させ易く表示することを可能とした車両用走行案内装置、車両用走行案内方法及びコンピュータプログラムを提供する。
【解決手段】ナビゲーション装置1に係る案内情報をHUD50により表示する場合に、車両に関する車両情報と車両の周辺環境をそれぞれ取得し、取得した車両情報と車両周辺環境とに基づいて、車両に所定値以上の制動力が継続的に発生することが予測される区間を、車両姿勢が基準姿勢に対して変位している状態が継続することが予測される区間として補正対象区間に設定し、設定された補正対象区間を車両が走行する間において、案内情報を表示する表示位置を、車両の制動力の発生に基づく車両姿勢の変位を考慮して補正するように構成する。
(もっと読む)
有料道路の料金収受システム
【課題】通行券の悪用を防止する利便性の良い有料道路の料金収受システムを提供することを目的とする。
【解決手段】有料道路の入口料金所においてETC車両である後続車両が、非ETC車両である先行車両に対して発行された通行券の抜き取りが検知される前に入口車線への入線を検知した場合に、先行車両及び後続車両の車両番号を発行された通行券の通行券IDと関連付けて中央処理装置100の管理テーブルに登録する。
また出口料金所において当該通行券IDを有する通行券を利用者が提示した場合には、中央処理装置100の管理テーブルに問い合わせを行い当該通行券IDと関連付けて登録されている車両か否かを確認する。関連付けて登録されていないと確認された場合、当該車両の運転手に対して警告を発し、後続車両を不正補助車両として登録するため、後続車両が先行車両に対して発行された通行券を受け取って悪用することを防止することが出来る。
(もっと読む)
画像判定装置、画像判定方法および画像判定プログラム
【課題】開閉する可動部に応じて方向及び位置が変わる撮像部が適切な位置および方向となっているか否かを効率的かつ正確に判定すること。
【解決手段】画像判定装置10の記憶部13が、撮像部12により可動部11の開状態で撮影された画像データに含まれる開状態の特徴をなす第1の部分画像データ13aを記憶する。また、記憶部13は、撮像部12により可動部11の閉状態で撮影された画像データに含まれる閉状態の特徴をなす第2の部分画像データ13bを記憶する。そして、判定部14が、記憶部13に記憶された第1の部分画像データ13a及び第2の部分画像データ13bを用いて、判定対象画像データが閉状態で撮影された画像データであるか否かを判定する。
(もっと読む)
ナンバープレート認識プログラムおよびナンバープレート認識装置
【課題】ナンバープレートの文字認識処理結果の確度があまり高くないような場合でも,精度の高いナンバープレートの文字の認識が可能となる技術を提供する。
【解決手段】ナンバープレート認識装置10において,画像入力部11は,撮像装置20により撮影された画像を入力する。領域抽出部12は,入力された画像からナンバープレートの領域を抽出する。認識処理部13は,抽出されたナンバープレートの領域に対して,ナンバープレートの文字認識処理を実行する。文字認識候補判定部14は,文字認識処理の結果として複数の文字認識候補が得られた場合に,文字認識処理の結果以外の情報である,撮像装置に対応付けられた補助情報を用いた判定により,複数の文字認識候補から画像に写る車両のナンバープレートに記載された文字を特定する。認識結果出力部15は,ナンバープレートの文字の認識結果を出力する。
(もっと読む)
運転支援装置
【課題】運転支援装置において、自車両と衝突する可能性があるものがあるか否かを正確に把握し、運転者が不要な警報を受けることがないようにすることにある。
【解決手段】制御手段(3)は、衝突可能性判定手段(3C)により衝突する可能性があると判定された対象物を運転者(P)が認識したか否かを判定する認識判定手段(3D)を備え、この認識判定手段(3D)により対象物を運転者(P)が認識したと判定された場合に警報手段(9)から警報を出力しないように制御する。
(もっと読む)
接近物検知装置、接近物検知システム、および、接近物検知方法
【課題】車両がイグニッションOFFの状態であっても、車両に乗車している乗員の全員が降車を完了するまで車両への接近物検知を行うことを可能とする技術を提供する。
【解決手段】車両が停止した状態で、車両に搭載されたカメラで得られた撮影画像に基づいて、車両に接近する接近物を検知する。そして車両をイグニッションOFF状態とした場合でも乗員検知手段により車両内に乗員が検知される場合は前記接近物の検知を継続して行い、乗員検知手段により車両内に乗員が検知されない場合は接近物の検知を終了する。これにより、車両をイグニッションOFF状態とした場合でも、乗員検知手段により車両内に乗員が検知される場合は前記接近物の検知を継続して行うことで、車両から乗員が全員降車するまで接近物の検知を行える。
(もっと読む)
半導体集積回路およびその動作方法
【課題】道路白線の近傍を白い車両が走行している場合等において、道路白線の位置認識精度の低下を軽減する。
【解決手段】半導体集積回路1は、特に3次元画像処理機能14を具備する。映像入力装置10は、カメラ2で撮影される車両前方空間の映像信号を画像メモリ3に格納する。3次元画像処理機能14は画像メモリ3の前方空間の3次元遠近画像を平面視2次元画像に変換して、画像メモリ3に格納する。画像処理ユニット11、12は、画像メモリ3の平面視2次元画像の1フレームの濃度累積処理により道路白線を認識する。道路白線の認識後、表示装置4の画面に表示される表示画像データに認識された前記道路白線としての表示直線を描画する。映像出力装置13は、表示直線が描画された画像メモリ3の表示画像データを、表示装置4の画面に表示する。
(もっと読む)
事故発生予測装置、事故発生予測プログラム及び事故発生予測方法
【課題】道路形状に依らない他車の動きに起因する事故の発生を予測する。
【解決手段】自車と他車の間で事故が発生する可能性のある状態を、自車と他車の相対位置の情報、自車及び前記他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報で定義した事故定義を保持する予測状況DB18と、自車が実際に運転されている状態で、自車と他車の相対位置の情報、自車及び他車の移動ベクトルの情報、及び他車の移動ベクトルを変動させる要因の情報を取得する取得部(10A,10B,11,14)と、取得部で取得された情報と、事故定義とを比較して、事故が発生する可能性があるか否かを判定する判定部16と、を備える。
(もっと読む)
画像処理装置
【課題】車両の走行ルートに沿った路面のデータベース画像を生成することができる技術を提供する。
【解決手段】単眼カメラ3の撮影画像が背景画像取得手段6aにより取得されたときの自車両1の位置情報が位置情報取得手段6bにより取得され、位置情報取得手段6aの自車両1の位置情報に基づいて、生成手段6dにより、各フレームの撮影画像が射影変換された障害物を含まない上方視の画像がつなぎ合わされて、路面領域が連続する路面のデータベース画像が生成される。したがって、走行中の自車両1の単眼カメラ3の撮影画像に基づいて路面のデータベース画像を生成することができるため、例えば通勤の際に単眼カメラ3により撮影された撮影画像から自車両1の走行ルートに沿った路面のデータベース画像を生成することができる。
(もっと読む)
逆走検出装置
【課題】駐車エリア内において正しい進行方向への走行を促すことができる逆走検出装置を提供する。
【解決手段】逆走検出装置1は、高速道路のサービスエリアSにおいて、駐車中の他車両M1〜M5の駐車方向Y又はサービスエリアSに設けられた駐車線21の延在方向に基づいて、自車両M0の前方の走路Lの正しい進行方向Aを推定する進行方向推定手段と、進行方向推定手段で推定された進行方向Aに対して自車両が逆走方向に走路を走行しようとする場合には、報知を行う報知手段と、を備えたことを特徴とする。
(もっと読む)
運転支援装置
【課題】本発明は、運転者の煩わしさの低減を図ることができる運転支援装置を提供する。
【解決手段】本発明は、車両の運転者に対して車両周辺の障害物を回避するための運転支援を行う運転支援装置1であって、障害物を検出する障害物レーダ4と、運転者の運転操作を検出する運転操作検出部5と、障害物レーダ4の検出した障害物の車両に対するリスク度を算出するリスクマップ作成部13と、障害物レーダ4及び運転操作検出部5の検出結果に基づいて、運転者が障害物に対するリスク回避操作を行ったか否かを判定すると共に、リスク度の高さに応じて運転支援の内容を変更する支援判断部16と、を備え、支援判断部16は、運転者はリスク回避操作を行ったと判定した場合、当該障害物のリスク度が当該判定時点より高い段階における運転支援の内容を支援度の低い内容に変更することを特徴とする。
(もっと読む)
衝突予測装置
【課題】衝突予測装置において、車両の障害物と衝突する可能性のある領域が異なる場合でも、衝突予測の信頼性を容易に維持させる技術を提供する。
【解決手段】自車両における車体幅を区分けした複数の区画に対して、自車両と障害物との関係から算出される衝突予測位置及び信頼度を当てはめ、複数の区画のうちから障害物が衝突すると予測される衝突予測区画を判定するものであって、区画Xn(nは整数)は、自車両における車体幅にかかわらず障害物検出センサの検出精度によって決定された一定幅に設定されており、複数の区画X1〜X5は、自車両における車体幅に対して、区画Xnが1列に隙間無く並ぶ状態(図2(a))か、又は、区画Xnが重なった部分を有しつつ区画Xnが隙間無く並ぶ状態(図2(b))のどちらかの状態に設定されている。
(もっと読む)
181 - 200 / 5,473
[ Back to top ]