
Fターム[5H180LL15]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | カーブ、見通し・視界不良箇所 (1,253)
Fターム[5H180LL15]に分類される特許
61 - 80 / 1,253
道路形状検出装置、走行制御装置、及び道路形状検出方法
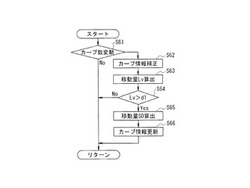
【課題】認識しているカーブ数のハンチングを抑制する。
【解決手段】各カーブ区間の入口補間点について、演算周期における前回の演算結果と比較し、カーブ区間数が変動しているか否かを判定し(ステップS5)、カーブ区間数が変動していたら、前回のカーブ情報と自車両の移動量とに基づいて、今回のカーブ情報を補正する(ステップS6)。先ず、カーブ区間が減少しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ増加させる。一方、カーブ区間が増加しているときには、n番目以前のカーブ区間には1番目〜n番目のカーブ情報を代入し、n番目より後のカーブ番号は一つずつ減少させる。すなわち、今回のカーブ情報を、前回の配列に戻す補正を行うことで、前回のカーブ区間数を保持する(ステップS62)。
(もっと読む)
通信制御装置、路側通信機及び通信システム

【課題】路側通信機用のタイムスロットで送信する情報の内容に応じた好ましい手段によって情報提供が可能となる通信制御装置を提供することを目的とする。
【解決手段】路側通信機2が無線送信を行う路側用タイムスロットTaが、時分割で割り当てられて通信が行われる。情報分類部23Cは、路側用タイムスロットTaで送信する情報を更新する頻度の高低を判断基準として、当該情報を高頻度更新情報と低頻度更新情報とに分類する。高頻度更新情報と低頻度更新情報とを路側用タイムスロットTa毎の複数のパケットに割り当てて送信させるために、情報割り当て部23Dは、高頻度更新情報を優先してパケットに割り当て、余りの部分に低頻度更新情報を割り当てる。
(もっと読む)
運転評価装置
【課題】運転者個人に適した運転評価を行うこと。
【解決手段】運転評価装置1は、車両の状態量を示す状態情報と該状態量における危険度とを含む目標情報を複数記憶する目標状態記憶部13と、許容危険度に基づいて当該複数の目標情報から一の目標情報を選択する目標状態選択部14と、自車両の状態量を検出する車両状態検出部12と、検出された自車両の状態量に基づいて現在の危険度を推定する運転推定部15と、選択手段により選択された一の目標情報の危険度と推定された危険度とを比較して自車両の運転状況を判定する判定部16と、許容危険度と推定された危険度とに基づいて該許容危険度を修正する修正部18と、を備える。
(もっと読む)
交差点運転支援装置
【課題】非優先道を走行する車両が優先道に進入するに際し、見通しの良い交差点では交差点支援情報を報知しないことで、運転者に与える煩雑感を軽減させるようにする。
【解決手段】非優先道102から優先道101に進入するに際し、見通し判定処理部14は一時停止位置104付近に設置されている第1インフラ設備103aから得られた優先道101側の移動体情報と、車両に搭載されている自律センサで検出した優先道101側の移動体情報とを比較し、不一致の場合は見通しが悪いと判定し、一致した場合は見通しが良いと判定する。そして不一致の場合は運転者に交差点支援情報を運転者に報知し、一致した場合は、運転者が目視により確認済みであると判定し報知しない。
(もっと読む)
運転支援装置
【課題】自車両が交差点に進入する際、燃費向上運転支援を適切に行う。
【解決手段】運転支援装置は、交差点に設置された信号機(400)の信号サイクル情報、及びこの交差点にて交わる複数の道路のうち自車両が走行する道路の停止線(500)の手前に位置する所定領域(A1)に存在する他車両の存在状況を示す存在状況情報を、この交差点に設置された路側送信機(220)から受信する受信手段(20)と、信号サイクル情報及び存在状況情報に基づいて、自車両が停止する停止位置を予測する予測手段(110)と、予測手段によって予測された停止位置よりも手前で燃費向上運転支援を実施する実施手段(120)とを備える。
(もっと読む)
通信制御装置及び路側通信機
【課題】エラーの発生を抑制して所定の無線通信成功率を確保することができる通信制御装置を提供することを目的とする。
【解決手段】路側通信機2が無線送信を行う路側用タイムスロットTaで送信する送信情報を、複数のパケットに分割して路側通信機2から送信させる。パケット長と、当該パケット長のパケットで送信した場合の無線通信成功率との関係を示す参照情報を記憶する記憶部24と、前記送信情報が有するデータ長と前記参照情報とに基づいて、当該送信情報を複数のパケットに分割する単位となる単位パケット長Lを決定する決定部23Eとを備えている。
(もっと読む)
運転支援装置
【課題】より自車が走行する状況に応じて、自車が経路上を走行するための規範となる運転支援を行なうことが可能な運転支援装置を提供する。
【解決手段】ECU20が、経路の道路形状と経路上の移動に関する2以上のパラメータそれぞれの時間変化率とを対応付けたデータベースから、自車100が走行する経路の道路形状に対応するパラメータそれぞれの時間変化率を抽出し、抽出したパラメータそれぞれの時間変化率に基づいて、自車100が経路上を走行するための規範となる規範速度を算出する。このため、経路の道路形状に対応した経路上の移動に関する2以上のパラメータそれぞれの時間変化率に基づいて規範速度が算出されることになり、より自車100が走行する状況に応じた規範速度を提供することが可能となる。
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内および前記交差点周辺を移動する複数の対象を撮像する全体視撮像部と、前記交差点に設置された一対の歩行者用信号および自動車用信号の少なくとも一方の点灯状態を示す信号情報を取得する信号情報取得部と、前記信号情報に基づいて、前記全体視撮像部の撮像データから事故の危険性の高い前記対象を追跡対象として特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像方向および焦点を制御する制御部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
通知装置
【課題】無線装置の搭載の有無に関係なく、車両の接近を通知する技術を提供する。
【解決手段】通知装置10は、交差点を中心としたエリア内に設置される。アンテナ60、無線部62、FFT部64、復調部66は、車両に搭載された無線装置からの信号を受信する。検出部68は、受信した信号をもとに、車両が交差点に接近していることを検出する。通知部70は、検出した接近に関する情報を通知する。取得部72は、通知装置10が設置された交差点とは別のエリアに設置された信号機の点灯色に関する情報を取得する。通知部70は、車両の接近を検出した場合であっても、取得した情報に含まれた点灯色によっては、通知を延期する。
(もっと読む)
撮像システム
【課題】追跡対象の位置および大きさをより正確に検出することができる。
【解決手段】交差点に設けられる撮像システムであって、前記交差点内を移動する歩行者を撮像する全体視撮像部と、予め定められた条件に基づいて、前記全体視撮像部の撮像データから追跡対象とすべき前記歩行者を特定する追跡対象特定部と、前記全体視撮像部の撮像素子における画素密度よりも高い画素密度の撮像素子を有し、前記追跡対象を追跡しながら撮像する複数の特定対象撮像部と、前記特定対象撮像部の撮像データに基づいて、前記追跡対象が事故に遭う危険性の高い危険状態であるか否かを判定する危険状態判定部と、を備えることを特徴とする撮像システムを提供する。
(もっと読む)
道路形状学習装置、道路形状学習方法および道路形状学習プログラム
【課題】車両制御の対象となる区間を確実に含み、且つ、曲率半径が比較的大きい区間までを、コーナ区間として適切に検出する技術の提供。
【解決手段】車両の走行軌跡を取得し、当該取得した走行軌跡に基づく位置情報と曲率半径情報とを対応付けて記憶部に記憶し、記憶されている位置情報と前曲率半径情報とに基づいて、第1閾値以下である曲率半径を示す曲率半径情報に対応付けられた位置情報が連続する区間を第1区間として検出するとともに、記憶されている位置情報と曲率半径とに基づいて、前記第1区間を包含する区間であって、且つ、前記第1閾値よりも大きい第2閾値以下である曲率半径を示す曲率半径情報に対応付けられた位置情報が連続する区間を第2区間として検出し、検出した第2区間がコーナ区間であると特定して当該コーナ区間の形状を示すコーナ情報を作成する。
(もっと読む)
死角場所推定装置及び死角場所推定方法
【課題】移動端末の位置情報を用いることにより、道路等の通行者にとって死角となる場所に関する有用な情報を得ることを可能とする。
【解決手段】死角場所推定装置1は、複数の移動端末の位置情報を取得する位置情報取得部11と、位置情報に基づいて当該移動端末のユーザの方位を位置情報毎に算出する方位算出部13と、建物及び道路の位置に関する情報を含む地域情報を取得する地域情報取得部12と、位置情報に示される所在位置及び当該位置情報のユーザの方位、並びに地域情報に基づいて、死角情報を位置情報毎に生成する死角生成部14と、死角情報を道路における所定範囲毎に集計して死角場所を推定する死角集計部15と、死角場所に関する情報を出力する処理結果出力部16とを備える。これにより、通行者の死角となりやすい場所に関する有用な情報を得ることが可能となる。
(もっと読む)
車両の走行安全装置
【課題】見通しの悪い交差点等において、その見通しの良否に応じて、警報を作動させるタイミングを変更する。
【解決手段】運転者の位置よりも車両の前部に配置され、該車両の周辺の物体を検出し、検出された物体のうち、該車両近傍に接近してくる移動物体について、該車両と衝突の可能性があると判定された場合に、該車両の運転者に報知を行う走行安全装置が提供される。ここで、検出された移動物体の方向を車両の運転者が見通すことのできる角度を、第1の見通し角度として算出する。該第1の見通し角度に基づいて、運転者への報知のタイミングを変更する。運転者が見通すことのできる角度に基づいて報知のタイミングを変更することができるので、見通しが悪いほど、報知のタイミングを早めることができる。よって、衝突回避のための動作をより的確なタイミングで運転者に促すことができる。
(もっと読む)
車両の走行安全装置
【課題】衝突の可能性がある移動物体ごとに報知が運転者に発せられるので、報知が頻繁に行われることに起因する運転者へのわずらわしさを軽減する。
【解決手段】車両の周辺の物体を検出し、検出された物体のうち、該車両の進行経路に接近してくる移動物体を判定し、該判定された移動物体について、該車両と衝突の可能性があると判定された場合に、自車両の運転者に報知を行う走行安全装置が提供される。該判定された移動物体が複数ある場合には、該複数の移動物体を、該移動物体の数以下のグループに編成し、上記の衝突の可能性の判定は、該編成されたグループのそれぞれについて行われ、報知は、該衝突の可能性があると判定されたグループのそれぞれについて、1回だけ行われる。したがって、自車両に接近してくる移動物体が複数存在しても、該移動物体のグループごとに報知が運転者に発せられるので、わずらわしさを軽減することができる。
(もっと読む)
路車間通信システム、及び車載用装置
【課題】交差する道路の各方向に異なる内容の情報を伝達することが可能であるとともに、車両の進入角度に応じた情報の伝達が可能である路車間通信システムを提供する。
【解決手段】本発明の路車間通信システムは、車載用装置を搭載した車両と、路側機とを含んでいる。路側機が備える送信制御部は、車両の進入角度に応じて車両へ伝達する情報である伝達情報を生成する。そして伝達情報に対応する進入角度と伝達情報とを関係付けた関係情報を生成して送信する。車載用装置が備える受信制御部は、この電波を受信するよう電波受信装置を制御する。また車載用装置が備える角度算出部は、路側機が設けられた道路に対する車両の進入角度を、GPS装置を用いて算出する。また車載用装置が備える情報抽出部は、受信電波に含まれる関係情報を取得し、角度算出部により進入角度を算出し、算出された進入角度に関係付けられている伝達情報を関係情報より抽出する。
(もっと読む)
運転支援装置
【課題】提供される運転支援情報に従った運転を運転者に行わせて安全運転を遵守させるようにする。
【解決手段】支援情報対応判定部13aは、車両に搭載されている各種センサ類22、及び外部から入力される情報に基づき安全運転を実現するために必要な運転支援情報を設定し、この運転支援情報を支援情報出力部13cを介して情報提供装置23に出力し、運転者に運転支援情報を提供する。そして、この運転支援情報を提供した後、支援対応評価部13bは、運転者が運転支援情報に対応する運転が行われたか否かを、センサ類から入力される情報に基づいて評価し、この評価結果を情報提供装置23に出力して運転者に報知する。
(もっと読む)
ナビゲーション装置
【課題】車体をカーブで走行させる際に、カーブの環境の変化や運転者の意識に対応して適正に報知を行うナビゲーション装置を構成する。
【解決手段】車体がカーブに接近した際に、カーブの半径に基づいてカーブでの適正走行速度を算出し、車体の走行速度が適正走行速度より高速である場合に、減速度設定手段28が車体の走行時における基準減速度を算出し、基準減速度が閾値を超えることを報知出力手段30が判別したタイミングで左振動体VLと右振動体VRを同時に駆動する等の報知を行う。
(もっと読む)
運転支援表示装置
【課題】運転者にとって、現在車速が適正かどうかを余裕を持って確認でき、且つ、直感的に分かりやすい運転支援表示装置を提供する。
【解決手段】前方道路の形状、現在車速Vcurを逐次取得し、それらから理想走行軌跡32および予測走行軌跡33を逐次更新しつつ、車両走行中、常時、理想走行軌跡32と予測走行軌跡33とを表示器30に表示する。現在車速Vcurが前方のカーブを安全に走行するための理想的な速度である場合や、その理想的な速度をやや超えている程度であり、危険と判断するほどではない場合にも、理想走行軌跡32と予測走行軌跡33を表示器30に表示することになる。そのため、運転者は、運転操作に余裕のあるときに表示を確認することができる。また、現在車速Vcurが適正かどうかを理想走行軌跡と予測走行軌跡とのずれから判断することができるので、直感的に分かりやすい。
(もっと読む)
道路曲率推定装置
【課題】自車両が進行する道路の曲率を正確に推定可能とする道路曲率推定装置を提供する。
【解決手段】自車両の前方の道路の曲率を推定する道路曲率推定装置であって、自車両の前方を走行する先行車の走行軌跡を算出する先行車軌跡検出手段と、自車両の前方を写した前方画像を撮像する撮像手段と、先行車が車線変更したか否かを、前方画像中における先行車および白線の位置関係に基づいて判定する車線変更判定手段と、先行車が車線変更中である場合、先行車の走行軌跡を当該車線変更先の車線に沿うように補正する先行車軌跡補正手段と、先行車の走行軌跡に基づいて道路の曲率を推定する曲率推定手段とを備える道路曲率推定装置である。
(もっと読む)
車両制御装置
【課題】 ドライバに与える違和感の少ない運転支援を実現できる車両制御装置を提供する。
【解決手段】 車両制御用のアクチュエータ(エンジン15、制動制御装置)を備えた車両に搭載され、自車両の進行方向前方の走行環境を計測する走行環境計測部(カメラ1a,1b)と、走行環境計測部による走行環境の計測結果の信頼度(存在信頼度)を判定する信頼度判定部22と、判定された信頼度を必要条件としてアクチュエータの作動を行うコントロールユニット2と、を備えた。
(もっと読む)
61 - 80 / 1,253
[ Back to top ]