
Fターム[5H180LL15]の内容
交通制御システム (133,182) | 衝突防止 (18,251) | 特定の場所における衝突防止 (1,961) | カーブ、見通し・視界不良箇所 (1,253)
Fターム[5H180LL15]に分類される特許
21 - 40 / 1,253
物体識別方法及び物体識別装置
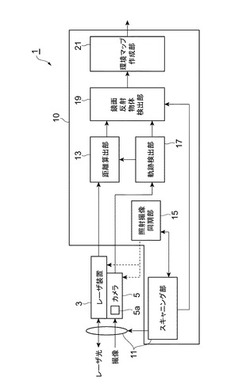
【課題】反射物体が存在する場所においても、物体の誤認識を抑制することができる物体識別方法及び物体識別装置を提供する。
【解決手段】物体識別装置1は、車両前方の物体にレーザ光を照射し物体からのレーザ光の反射状態によって物体との距離を測定するレーザ装置3と、少なくとも上記レーザ光の波長帯域の光を受光させるフィルタ部5aを備えたカメラ5と、レーザ装置3で対象物との距離を測定すると共に、レーザ装置3のレーザ光の照射方向に撮像方向を略一致させてカメラ5で撮像を行い、カメラ5がレーザ光の照射軌跡を認識した場合には、レーザ装置3で測定された対象物との距離値を無効にする。
(もっと読む)
走行支援システム及び方法

【課題】変化する道路環境に略リアルタイムに対応して推奨ルート・挙動等を提供する。
【解決手段】クライアントシステム2は、測位部11と、基準情報を格納する基準情報格納部12と、走行履歴取得部13と、挙動履歴取得部14と、画像認識部15と、ルート生成部16と、挙動生成図17とを備え、サーバシステム3は、複数の車両の走行履歴情報を格納する走行履歴データベース21と、複数の車両の挙動履歴情報を格納する挙動履歴データベース22と、複数の車両の画像認識情報を格納する画像認識データベース23と、前記データベース21〜23に格納された情報に基づいて各クライアントシステム2の前記基準情報を更新する更新情報を送信する基準情報更新部24とを備える。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
交差点車両警告装置
【課題】交通渋滞の交差点に所定速度以上の二輪車が入ってくる状況で、対向車線から右折する車両に警告を発交差点車両警告装置を提供すること。
【解決手段】一例の交差点車両警告装置は、ある車線で交差点に進入し右折する右折車両を検知する右折車両検知手段と、前記車線に対向する車線を走行し前記交差点に進入する車両を撮影して画像を得る走行画像取得手段と、この走行画像取得手段により得られた画像から走行車両の渋滞状況を把握する渋滞状況把握手段と、この渋滞状況把握手段により渋滞が検知されたとき、前記走行画像取得手段により得られた前記画像から二輪車を検知し、検知された二輪車の速度が所定二輪車速度以上であるかを判定する二輪車速度判定手段と、この二輪車速度判定手段により前記二輪車の速度が所定二輪車速度以上と判定されたとき、前記右折車両に警告を送信する警告送信手段と、を有する。
(もっと読む)
車両用画像表示装置及び車両用画像表示方法
【課題】カメラ画像を用いて障害物の検出を行い、死角が発生する可能性が高いときのみ、カメラ画像に切り替えて表示する車両用画像表示装置を提供する。
【解決手段】車両周囲の映像を夫々撮影する複数のカメラを含む撮像部と、複数のカメラのうち車両の進行先の映像を撮影する少なくとも2つのカメラで撮影した画像を比較し、比較画像の一致度に応じて障害物の有無を判定する障害物判定部と、車両の情報及び車両の進行を案内するナビゲーション情報を生成する車両情報生成部と、障害物判定部による障害物の判定結果と、車両情報生成部から入手した車両の進行先の状況を示す情報をもとに、ナビゲーション画像又は進行先周辺の映像を撮影したカメラ画像を切り替えて出力する表示切替部と、表示切替部から出力された画像を表示可能な表示部と、を具備する。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
走行支援装置
【課題】走行支援装置において、自車両が旋回する場合に、安全に旋回できないことを早期に検出して自車両の走行を支援する技術を提供する。
【解決手段】CCDカメラ8で取得した路面ペイントの種類に基いて、自車両がこれから向かう交差点で右折又は左折の旋回を行う場合に限定できるか否かを判別する(S104)。自車両がこれから向かう交差点で右折又は左折の旋回を行う場合に限定できる場合に、ナビゲーション装置5から取得する交差点の情報と、車速センサ6が送信する自車両の速度と、に基いて、自車両の速度が安全に旋回可能な速度を超えているか否かを判別する(S106)。自車両の速度が安全に旋回可能な速度を超えていると判定された場合に、警報を発する(S107)。
(もっと読む)
車両の自動ブレーキ制御装置
【課題】本発明は、交差点内或いは交差点付近において誤作動を低減することのできる車両の自動ブレーキ制御装置を提供する。
【解決手段】ミリ波レーダで検出された障害物の位置情報及びGPSで検出された自車の位置情報から障害物位置判定部にて障害物の位置が交差点内或いは交差点付近であるか否かを判定し(S16〜S22)、判定結果をブレーキ制御部へ供給し、ブレーキ制御部では、障害物が静止物である場合には静止物用ブレーキ制御、障害物が移動物で且つ自車或いは障害物の位置が交差点内或いは交差点付近である場合には静止物用ブレーキ制御を行い(S26)、障害物が移動物で且つ自車或いは障害物の位置が前述以外の場合には移動物用ブレーキ制御を行い(S28)、警告灯、スピーカ及びブレーキ装置の作動タイミングを制御する。
(もっと読む)
位置補正装置及び方法、並びに運転支援装置
【課題】自動車等の車両の走行位置を正しい位置に補正する。
【解決手段】位置補正装置(100)は、運転者の減速行動を車両が走行している場所情報と関連づけて学習する学習手段(120)と、学習された減速行動のうち、場所情報が同じであればバラツキが所定の範囲内となる行動を特徴点として抽出する抽出手段(150)と、場所情報が同じである地点を走行する場合に、運転者の特徴点を検出する検出手段(140)と、検出された特徴点及び学習された減速行動から抽出された特徴点を互いに比較することで、車両の位置補正を行う補正手段(160)とを備える。
(もっと読む)
人横断支援車両システム及び人横断支援方法
【課題】横断歩道が設置されていない道路においても、歩行者の安全な道路横断を支援する歩行者横断支援車両システムを提供する。
【解決手段】人を検出する人検出手段2と、車両の位置情報を検出する自車位置検出手段3と、人検出手段2が検出した人を横断候補者として、横断候補者の絶対的な位置を計算するとともに、横断候補者が道路を横断するために待機している時間を計測して待機状態の指標である待機スコアを計算し、計算結果を人位置及び待機スコア記憶手段6に記憶する位置及び待機スコア計算手段5と、横断候補者の人位置および待機スコアに基づいて、車両を停車させるか否かを判断する停車判断手段10と、停車判断手段が車両を停車させると判断した場合に車両を停車させる走行制御手段12と、停車判断手段の指令に基づき、横断候補者に対し道路を横断可能か否かの旨の情報を表示する信号機である歩行者横断信号表示手段13と、を備える。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
運転支援装置
【課題】右折事故防止運転支援等の運転支援を適切に実施する。
【解決手段】運転支援装置は、対向車線820における交差点の手前に設定された検知エリアA1における対向車両の存在状況を示す検知エリア内情報及び交差点に設置された信号機400の信号サイクル情報を路側送信機220から受信する受信手段と、対向車線における検知エリアよりも交差点側に停止している対向車両である検知エリア外車両が存在するか否かを、検知エリア内情報及び信号サイクル情報に基づいて判定する判定手段と、判定手段によって検知エリア外車両が存在すると判定された場合には、自車両が交差点に進入する際に運転支援を所定時間継続して実施する実施手段とを備える。
(もっと読む)
交差点衝突防止警告装置
【課題】十字路、Y字路及びT字路等の種々の形態の交差点の路面中央に埋め込んで、一式の検知用センサによって交差点への全進入路における車両や歩行者の進入及び位置を検知し、交差点に進入する夫々の車両や歩行者に対して他の進入路における車両や歩行者の進入及び位置情報を発信することが可能な交差点衝突防止警告装置を提供することにある。
【解決手段】本体2に回転自在に設けられた回転台4に取り付けられ該回転台4の回転により交差点の全進入路に対して車両や歩行者を検出する1つの検出用センサ7と、回転台4に取り付けられ反射部と非反射部が回転台の周方向に交互に周期的に設けられた光学スケール9と本体2に設けられた回転角検出器10とにより構成されて回転台4の回転量を検出するエンコーダと、本体2に設けられ交差点に進入する車両や歩行者の存在を警告する警告灯3を備えるようにした。
(もっと読む)
死角領域推定装置及びプログラム
【課題】、簡易な処理で、動的死角領域を推定することができるようにする。
【解決手段】存在確率変更部26によって、地図情報において、レーザレーダ12によって検出された現在の物体の位置に対応するブロックの存在確率を増加させると共に、自車両から検出された現在の物体の位置までの直線上に存在するブロックの存在確率を減少させることにより、静止物の位置を記録した地図情報を取得する。静的死角推定部28によって、取得された地図情報に記録された静止物の位置と、自車両の現在の位置とに基づいて、静的死角領域を推定する。現死角推定部30によって、レーザレーダ12によって検出された現在の物体の位置に基づいて、現在死角領域を推定する。動的死角推定部32によって、推定された現在死角領域と、推定された静的死角領域との差分に基づいて、動的死角領域を推定する。
(もっと読む)
車両制御装置
【課題】十分な安全性を確保しつつも、状況に応じて運転者の運転感覚に沿った制御を行うことのできる車両制御装置を提供する。
【解決手段】逸脱角度θに対する目標逸脱角度θ´を演算する目標逸脱角度演算部16が、白線WLと障害物B1との間の逸脱余裕距離Dに基づいて目標逸脱角度θ´を演算する。白線WLと障害物B1との間の逸脱余裕距離Dは、白線WLを越えた場合に自車両M1と障害物B1との間にどの程度の余裕があるのかを示している。当該逸脱余裕距離Dに基づいて、安全性を確実に確保できる範囲で目標逸脱角度θ´を演算しておけば、何らかの理由で逸脱角度θが増加する動作をするとしても、目標逸脱角度θ´を満たす範囲において、ある程度許容することができる。これによって、制御量が過剰に介入してしまうことを抑制することができる。
(もっと読む)
運転支援システム
【課題】運転支援の必要がない状況になった際に速やかに運転支援を終了させる。
【解決手段】ハンドル角センサ11、車速センサ12、ターンシグナルスイッチ13、ブレーキスイッチ14の情報により、運転者の意思に基づいて自車両が支援システムの当該路から外れたことを退出判断部7で認識した時に、判断部6によりカーナビ部5への表示を停止させる。
(もっと読む)
車載安全制御装置及び安全運転支援システム
【課題】センサの検出範囲が衝突事故発生予測位置を含んでいない場合においても、精度の高い衝突危険性度合で警告可能な車載安全制御装置及び安全運転支援システムを得る。
【解決手段】TTC演算モデル判定部14Aは、路側移動体検出装置2が検出した移動体6(対象移動体)で、かつ、所定時間Th経過後に検出範囲Ld外に移動するものと判定される移動体(仮想移動体)が存在する場合、当該対象移動体の進行方向に設置されている信号機の灯色が赤から青に変化する時点において、当該対象移動体の速度が基準速度Va以下である場合に、加速モデルとして判定し、基準速度Vaを上回る場合は等速モデルとして移動モデルを判定する。TTC演算処理部15Aは上記移動モデルに用いて、対象移動体が衝突事故発生予測位置P点に到達する到達予測時間Tpを演算する。
(もっと読む)
車載装置および認知支援システム
【課題】車載装置のコスト低減を図るとともに、ドライバーの死角から自車両に接近する移動物体の検出漏れを防止しつつ、検出した移動物体の存在をドライバーに対して確実に認識させること。
【解決手段】歪曲した受光部により広角な範囲の映像を車載装置が撮像し、撮像された映像に基づいて撮像部の設置方向および設置方向以外の方向から自車両に接近する移動物体を車載装置が検出し、検出された移動物体と自車両とが衝突する可能性を示す衝突危険度を車載装置が判定し、判定された衝突危険度に応じて移動物体の存在を報知するように車載装置を構成する。
(もっと読む)
運転支援装置
【課題】車線変更の開始時点を迅速に且つ精度良く推定することができる運転支援装置を提供すること。
【解決手段】運転支援装置1では、車線変更推定部13は、ウィンカーセンサ3によってウィンカーONが検出された第1の時点における曲率変化速度が基準曲率変化速度以上である場合、曲率変化速度が基準曲率変化速度であった第2の時点を車線変更開始時点と推定するため、車線変更開始後にウィンカーが操作された場合であっても、その操作の遅れを考慮して車線変更の開始時点を精度良く推定できる。また、ウィンカーONが検出された時点で既に得られている走行情報により車線変更の開始時点を推定するため、車線変更の開始時点を迅速に推定できる。
(もっと読む)
音声通知装置
【課題】車両に搭載される音声通知装置であって、車両の乗員に対して短時間に必要な情報を提供する報知方法を決定することができる音声通知装置を提供すること。
【解決手段】車載装置などから取得した音声情報データが記憶装置12に記憶される。次に、同時に報知する必要がある音声情報データ数を検出する。次に、音声情報処理部13は先に取得した音声情報データを基に報知用音声情報データを出力する。この場合、同時に報知する必要がある音声情報データ数が多い場合は、車両の乗員に対して短時間に多くの情報提供を行う必要があると判断し、報知用音声情報データのメッセージ長を短くするのが特徴である。また、音声情報データ数が少なくメッセージ長を短くする必要がない場合は、音声情報データのメッセージ長を変更せず報知用音声情報データを出力する。次に、出力された報知用音声情報データに基づいて音声による報知が行われる。
(もっと読む)
21 - 40 / 1,253
[ Back to top ]