
Fターム[5H505DD03]の内容
交流電動機の制御一般 (51,584) | 電動機の種類 (6,219) | 多相電動機 (2,279)
Fターム[5H505DD03]に分類される特許
21 - 40 / 2,279
モータを制御するための方法およびシステム
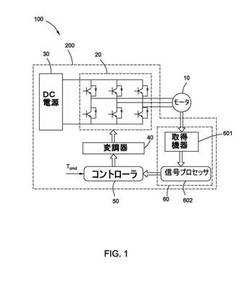
【課題】DCバス電圧利用率を確保するために、可能な限り大きなモータトルクを確保する電圧振幅および電圧位相角の適した点を迅速に決定する方法およびシステムを提供する。
【解決手段】モータ10を制御するための方法は、モータの電気信号を信号ユニット60によって入手するステップを含む。電気信号は、モータトルクおよび角速度を含む。電圧ベクトルの電圧位相角を計算機器によって計算するステップをさらに含む。コマンドトルクTcmd、モータトルク、角速度、および電圧ベクトルの電圧振幅が、計算機器の入力である。方法は、インバータ20を制御するスイッチング信号へと電圧位相角および電圧振幅を変調器40によって変調するステップをさらに含む。方法は、スイッチング信号にしたがって電圧ベクトルへと直流電圧をインバータによって変換するステップ、およびモータへ電圧ベクトルを印加するステップをさらに含む。
(もっと読む)
コンベヤ駆動装置

【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の永久磁石回転子3dに、インバータ装置11による通電で着磁量が変化するレベルの低保磁力永久磁石3p〜3sを永久磁石の一部として配置し、該低保磁力永久磁石3p〜3sを所定の回転数範囲内で回転数が高くなるほど増磁させ回転数が低くなるほど減磁させるよう、前記永久磁石同期モータ3の各相の巻線3a〜3cに対して通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
モータ制御装置及びモータパラメータ推定方法
【課題】オンラインでのモータパラメータ同定を可能とするとともに、空間高調波によるモータパラメータ同定への影響を低減又は無くすことができるモータ制御装置及びそれに用いられるモータパラメータ同定方法を提供する。
【解決手段】モータパラメータ同定部9が、前記電動モータMの制御回転軸の位相が所定位相となった時に前記電動モータMに印加されている電圧値である同定用電圧値、又は、前記電動モータの制御回転軸の位相が所定位相となった時に前記電動モータに流れている電流値である同定用電流値に基づいて前記モータパラメータを同定するように構成した。
(もっと読む)
液体抵抗器の劣化診断装置
【課題】この発明は、液体抵抗器の劣化診断装置に関し、液体抵抗器の劣化を、機器を分解することなく判断することのできる液体抵抗器の劣化診断装置を提供することを目的とする。
【解決手段】巻線形誘導電動機の速度を検出する速度センサと、前記巻線形誘導電動機の二次回路に接続され前記巻線形誘導電動機の起動に際し電極間距離を徐々に縮めることによりその抵抗値を下げる液体抵抗器と、前記電極間距離が最小となったときに前記速度センサにより検出される電動機速度が速度基準値を下回るか否かを判定する電動機速度判定手段と、前記電動機速度が前記速度基準値を下回る場合にアラーム信号を出力するアラーム信号出力手段とを備える。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
産業用ロボットの可動部の回転軸に接続されたサーボモータを駆動するサーボモータ駆動装置
【課題】電源回生機能を産業用ロボットの操作条件に応じて追加することができるサーボモータ駆動装置を提供する。
【解決手段】サーボモータ駆動装置2は、ダイオード209a−1,209a−2,209a−3,209a−4,209a−5,209a−6を有するコンバータ201aと、産業用ロボット3の可動部の回転軸に接続されたサーボモータ300−1,300−2,...,300−mの減速駆動時に生じる回生エネルギーを、NPN型トランジスタ210aがオン状態であるときに消費する回生抵抗211aを有する回生抵抗回路202aと、回生エネルギーを三相交流電源1側に回生するコンバータ4を着脱自在に接続するコネクタ203a,204a及び多ピンコネクタ205aと、を有する。
(もっと読む)
モータ駆動装置及びこれを用いた電気機器
【課題】モータの急減速時や正転/逆転切換時における電源電圧の上昇を抑制する。
【解決手段】モータ駆動装置10は、電源端とモータ30との間に接続された上側トランジスタ21U、21V、21W及びモータ30と接地端との間に接続された下側トランジスタ22U、22V、22W各々のオン/オフ制御を行うロジック回路12と、電源端に印加される電源電圧VCCと所定の保護設定値との比較結果に応じた過電圧保護信号を生成してロジック回路12に送出する過電圧保護回路18とを有し、ロジック回路12は、電源電圧VCCが保護設定値を上回ったときに上側トランジスタ21U、21V、21Wをオフとして下側トランジスタ22U、22V、22Wをオンとする。
(もっと読む)
制御方法及び制御装置
【課題】装置の大型化やコストアップを抑制しつつ、回生抵抗によって消費される回生電力を低減すること。
【解決手段】モータからの回生電力の少なくとも一部を熱エネルギとして消費する回生抵抗を備えた回生回路に接続されたモータの制御方法において、前記モータを所定の速度制御パターンで駆動する駆動工程と、該駆動工程後に前記モータを停止する待機工程と、を反復する反復工程と、前記駆動工程中、前記回生抵抗への通電状況を、監視回路にて監視する監視工程と、前記監視工程の監視結果に応じて、前記回生電力の発生が低減するように前記速度制御パターンを変更し、かつ、前記速度制御パターンの変更に伴い、前記駆動工程の実行時間を長くすると共に、前記待機工程における待機時間を短くする変更工程と、を備えたことを特徴とする。
(もっと読む)
インバータ回路の制御装置
【課題】スイッチング素子が、素子配列方向に沿って一列に並んで配置されている場合に、高電圧及び低電圧回路領域を効率的に設定し、装置を小型化できる制御装置の実現。
【解決手段】基板本体に、素子配列方向に沿って延びる中間絶縁領域と、中間絶縁領域を挟んだ一方側の高電圧回路領域と、他方側の低電圧回路領域と、が設定され、高電圧回路領域に駆動回路部が設けられ、低電圧回路領域に素子配列方向に沿って順に第一、第二、第三低電圧領域が設定され、第一低電圧領域に電圧変換部及び指令入力部が設けられ、第二低電圧領域に演算処理部が設けられ、第三低電圧領域にセンサ接続部が設けられているインバータ回路の制御装置。
(もっと読む)
予熱装置
【課題】モータを効率的に予熱できるようにする。
【解決手段】キャリア信号に同期して直流をスイッチングし、モータ(7)を駆動する所定周波数及び所定電圧の交流に変換するインバータ回路(4)を設ける。キャリア信号の周波数(fc)をモータ(7)の駆動時の周波数(fc1)よりも高い周波数(fc3)にして、インバータ回路(4)からモータ(7)に交流を供給させ、モータ(7)の予熱を行う制御部(5)を設ける。
(もっと読む)
電力変換装置
【課題】エンジン発電機による電動機駆動システムにおいて、電力変換器の高調波や直流電圧変動の影響によって、d軸とq軸の電圧外乱による電流脈動の強めあい現象により軸振動が増加し、dq軸間干渉の影響により振動やd軸電流が増加する恐れがある。
【解決手段】エンジン発電機システムの電力変換器105において、発電機104の回転子磁束方向のd軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにd軸電圧調整手段117により発電機104を制御するためのd軸電圧Vd*をΔVd*調整し、さらに、q軸電流に含まれる振動成分の位相が、発電機104の回転電気角周波数に含まれる同一周波数の振動成分の位相に対し、90度以上進むようにq軸電圧調整手段118によりq軸の電圧Vq*をΔVq*調整する。
(もっと読む)
モータ駆動装置およびモータおよびそれを搭載した空気調整機
【課題】モータ運転停止時は、制御電源からモータ駆動装置への電力供給量を低減して待機時の消費電力を抑える。
【解決手段】主電源からモータの複数相の駆動巻線へ電力供給するインバータ部と、制御電源を電力源とし、外部との信号入出力端子の一つとして前記駆動巻線への電力供給値を意味する制御信号入力端子を備え、前記インバータ部へPWM信号を前記制御信号に基づいて発生する制御部を備えたモータ駆動装置であって、
前記制御部は、前記制御信号が前記駆動巻線への電力供給値ゼロを意味している場合には、前記PWM信号発生に関る内部構成部分を機能停止するよう作用して内部消費電力を低減し、前記制御電源から制御部への電力供給量を前記内部構成部分機能動作中に比べ小さくする構成とした。
(もっと読む)
電動機の駆動方法および駆動装置
【課題】電動機の損失を最小化することができる電動機の駆動方法および駆動装置を提供する。
【解決手段】第1時刻から所定時間経過した第2時刻において目標回転速度ω*となるように電動機を駆動させる電動機の駆動方法であって、目標回転速度ω*を設定する目標設定ステップ(S1)と、電動機の入出力特性から得られたマップにおいて、第1時刻の動作点と、第2時刻の動作点と、第1時刻と第2時刻の間の時刻における複数の動作点とで構成された初期軌道L1を決定する初期軌道決定ステップ(S2、S3)と、初期軌道L1を構成する全動作点における損失の和が最小(または効率の和が最大)となるように、マップに基づいて最適化を行って目標軌道L2を導出する目標軌道導出ステップ(S4〜S7)と、目標軌道L2に従ってトルクおよび回転速度を制御する制御ステップと、を含むことを特徴とする。
(もっと読む)
インバータ装置及びインバータ装置のティーチング方法
【課題】機械式ブレーキを備えるモータ駆動システムについてブレーキ開遅れ時間を得るためのティーチング動作を行う場合に、より精度が高い結果を得る。
【解決手段】実施形態のインバータ装置によれば、設定手段は、制御部がモータの起動に伴って実行するブレーキの開制御をモータの可変速制御と連携して行なう際に、インバータ回路を介して検出される相電流に基づき演算により推定したモータの回転周波数の変化に基づき機械式ブレーキの開制御に使用されるブレーキ制御データを設定する際に、モータが停止して機械式ブレーキが閉じた状態で出力トルクを上昇させるよう制御部に指令を与え、推定されるモータの回転周波数の平均値を求め、その平均値に前記回転周波数の所定の変化分を加えたものを判定周波数として設定する。そして、ブレーキ開指令を出力するとブレーキ開遅れ時間の計測を開始し、モータの回転周波数が判定周波数以上になるまでの時間をブレーキ開遅れ時間として計測し当該時間を記録する。
(もっと読む)
無効電流指令作成部を有するモータ駆動装置
【課題】入力された交流を直流に変換する直流変換部と、直流変換部が出力した直流をモータの駆動のための交流に変換する交流変換部と、を備えるモータ駆動装置において、過電圧異常を抑制することができる、制御が容易で低コストおよび省スペースのモータ駆動装置を実現する。
【解決手段】モータ駆動装置は、入力された交流を直流に変換する直流変換部11と、直流変換部11が出力した直流をモータ3の駆動のための交流に変換する交流変換部12と、直流変換部11の直流出力側の電圧を検出する電圧検出部13と、電圧検出部13が検出した電圧が所定の閾値を超えたとき、交流変換部12が無効電流を出力するよう制御してモータにおける消費電力を増加させる数値制御部14と、を備える。
(もっと読む)
モータ制御装置、モータ制御方法
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータが一定速度で回転されているとき、d軸電流指令値及びq軸電流指令値を各々零に設定する補正制御部と、電流指令値と検出電流との偏差の積分値を生成する電流制御部と、生成された積分値を測定する積分値測定部と、を備え、補正制御部は、測定された積分値が予め定められている範囲内の値となるように調整することで前記モータの回転位置に対する補正値を調整する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
モータ駆動装置及びそれを備える制御システム
【課題】電源電流のリプルを低減できる、モータ駆動装置を提供すること。
【解決手段】モータ駆動装置70が、共通のバッテリ40からモータ30のステータコイルM1,M2に電流をそれぞれ供給する2つのインバータ部10,20と、インバータ部10がステータコイルM1に電流を供給するタイミングとインバータ部20がステータコイルM2に電流を供給するタイミングとを互いにずらす制御部50とを備えていること。制御部50は、インバータ部20のスイッチング素子Q7〜Q12をオン/オフさせる駆動信号を、インバータ部10のスイッチング素子Q1〜Q6をオン/オフさせる駆動信号よりも遅延させる。
(もっと読む)
電力変換装置
【課題】還流ダイオードに流れる電流の振動によって発生するノイズを抑制する電力変換装置を提供する。
【解決手段】複数のスイッチング素子Q1〜Q6と還流ダイオードD1〜D6とを有し、前記複数のスイッチング素子Q1〜Q6のオン及びオフを切り換えることで、入力された電力を変換し、負荷に出力する電力変換回路と、前記複数のスイッチング素子Q1〜Q6を駆動する駆動回路20と、前記電力変換回路及び前記駆動回路20を制御する制御手段とを備え、前記制御手段は、前記電力変換回路から前記負荷に供給される供給電流が0アンペア付近にある場合に、前記スイッチング素子Q1〜Q6をターンオンさせる際のスイッチング速度を、前記供給電流が0アンペア付近ではない場合のスイッチング速度より低下させる。
(もっと読む)
21 - 40 / 2,279
[ Back to top ]