
Fターム[5J062FF01]の内容
Fターム[5J062FF01]に分類される特許
281 - 300 / 1,399
衛星信号追尾方法、位置算出方法、衛星信号追尾装置及び位置算出装置
【課題】衛星信号追尾用のループフィルターのループバンド幅を適切な値に設定するための新たな手法を提案すること。
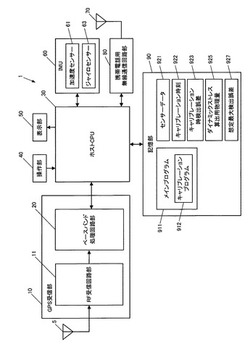
【解決手段】携帯型電話機1において、IMU60により移動状況が検出される。また、ホストCPU30により、IMU60の想定される最大の検出誤差である想定最大検出誤差が算出される。そして、ベースバンド処理回路部20の処理部27により、IMU60の検出結果及び想定最大検出誤差を用いて、GPS衛星から受信したGPS衛星信号を追尾するための追尾用ループ回路のループフィルター部のループバンド幅が設定される。
(もっと読む)
衛星測位システム

【課題】移動端末が自局の位置を高精度で測位できる衛星測位システムを安価に実現する。
【解決手段】複数個の準天頂衛星201、301a〜301dを用いた衛星測位システムにおいて、複数個の準天頂衛星が一体として衛星軌道に向けて打ち上げられ、複数個の準天頂衛星が一体として衛星軌道に沿って安定に飛行する段階において、比較的に高い仰角に位置する複数個の準天頂衛星の内の1個を基準局201とし、残りの準天頂衛星を中継局301a〜301dとして基準局の周辺の所定の軌道に分散させて、基準局から送信される第1の測位信号と各中継局から送信する第2の測位信号とを同期させることによって、移動端末が自局の位置を高精度で測位できるようにした。
(もっと読む)
無線通信システムにおける非支援のGPS型位置決定を支持する加入者局のシード位置を導出する方法およびシステム
【課題】無線通信システムにおける非支援のGPS型位置決定を支持する加入者局のシード位置を導出する方法およびシステム。
【解決手段】非支援のGPS型位置決定をサポートする際に、無線通信システムにおける加入者局のシード位置を導出する方法およびシステムにおいて、加入者局は、無線通信システムからオーバーヘッドメッセージを受信し、パラメータ値からシード位置を導出する。加入者局は、そのメモリ内のデータ構造を使用し、可能なパラメータ値をシード位置として働き得る対応する位置にマッピングすることができる。データ構造は、更新条件に対応して更新することができる。
(もっと読む)
衛星信号追尾方法、位置算出方法、衛星信号追尾装置及び位置算出装置
【課題】衛星信号追尾用のループフィルターのループバンド幅を適切な値に設定するための新たな手法を提案すること。
【解決手段】携帯型電話機1において、IMU60により移動状況が検出される。また、ホストCPU30により、IMU60の想定される最大の検出誤差である想定最大検出誤差が算出される。そして、ベースバンド処理回路部20の処理部27により、IMU60の検出結果及び想定最大検出誤差を用いて、GPS衛星から受信したGPS衛星信号を追尾するための追尾用ループ回路のループフィルター部のループバンド幅が設定される。
(もっと読む)
パターン分類を使用した、無線端末が屋内にあるかどうかの推定
【課題】 無線端末が屋内にあるか否かを推定する方法及び装置を提供すること。
【解決手段】 例示的実施形態は、複数の入力/出力マッピングでトレーニングされたパターン分類器を使用し、各マッピングは個々の位置に対応し、マッピングの出力は、当該位置が屋内であるかどうかを示すブール値であり、マッピングの入力は、その位置についての経験信号データと予測信号データに基づく。例示的実施形態によると、トレーニングされたパターン分類器に基づいてコンピュータ実行可能プログラムが生成される。コンピュータ実行可能プログラムは、無線端末から報告される経験データと、おおよそ或いは不正確である可能性のあるその端末の位置の推定(例えばセル識別子(Cell−ID)、GPS等に基づく)とに基づいて、無線端末が屋内にあるか否かを推定する。
(もっと読む)
屋内の検出に基づいて無線端末の位置を推定するための検索エリア削減
【課題】 無線端末向けの位置固有の支援データを生成する目的で、非GPS導出の技術を使用して、Assisted GPS機能を備える無線端末の位置を推定する方法を提供すること。
【解決手段】 無線端末は、支援データを使用して、1つ又は複数のGPS信号を取得及び処理し、無線端末の位置の証明となる情報を導出する。GPSで導出された位置情報は、次いで、非GPS導出の位置と組み合わせられて、GPS又は非GPSどちらかのみで導出するよりも良好な無線端末の位置の推定を形成する。このGPS導出技術と非GPS技術の組み合わせは、無線端末が1つ又は2つのGPS信号しか取得することができない場合に特に有用である。その理由は、2つのみのGPS信号だけで無線端末の位置を求めることは可能でないためである。
(もっと読む)
現在位置表示装置
【課題】GPS信号を再度受信した際に、GPS信号に基づく現在位置と、表示位置とが離れている場合に、スムーズにその誤差を解消して表示する。
【解決手段】GPS受信手段に基づいて現在位置を算出し、現在位置マークを表示する現在位置表示装置において、前記現在位置表示装置は、前記GPS受信手段によりGPS信号が受信できなくなった後、再度前記GPS信号が受信されると前記現在位置算出手段により前記再度GPS信号が受信された現在位置が算出され、該算出された現在位置と前記現在位置マークの位置とが所定距離以上離れているか否かを判定する位置比較手段を備え、前記表示位置決定手段は、前記位置比較手段が所定距離以上離れていると判定した場合、前記現在位置マークの位置を前記現在位置算出手段により算出された現在位置に段階的に近づくように移動させる。
(もっと読む)
位置測定装置および位置測定方法
【課題】 受信信号の帯域幅に影響されることなく、かつ回路規模の削減が可能で、さらに異なる発射源からの電波に対しても、それぞれの発射源位置を分離して測定することが可能な位置測定装置の提供。
【解決手段】 位置測定装置は、移動しながら電波発射源からの電波を受信する2つの移動体受信部1a,1bと、2つの移動体受信部1a,1bで受信される信号を取得してその周波数差を算出し、その周波数差の時間的変化から電波発射源の位置を測定する発射源位置測定部10とを含む。
(もっと読む)
携帯端末および位置測位方法
【課題】端末の測位負荷を軽減することができる携帯端末および位置測位方法を提供する。
【解決手段】GPS測位部101が所定周期若しくはユーザ指示に従って、位置測位を行っている。そして、その測位を行うにあたって、制御部105は携帯端末100の移動状態を判断する。制御部105は、携帯端末100は静止状態であって、状態情報管理テーブル106bに記憶されている状態情報を参照して、携帯端末100は直近に測位した位置から移動していないことを判断すると、位置情報記憶テーブル106aに記憶されている直近に測位された位置を、携帯端末100の現在位置として、位置情報記憶テーブル106aに記憶させることができる。
(もっと読む)
マルチコンステレーション全地球航法衛星システム補強及び支援
マルチコンステレーションGNSS補強及び支援システムは、複数の基準局を含むことができる。各基準局は、ナビゲーションデータを複数の異なる全地球航法衛星システムから受信し、そして各異なる全地球航法衛星システムに関するインテグリティデータ及び性能データを監視するように適合させることができる。オペレーションセンターは、前記複数の基準局の各基準局から送信される前記インテグリティデータ及び性能データを受信することができる。通信ネットワークは、前記オペレーションセンターからのメッセージを、ユーザのnavcom機器に送信して前記navcom機器を補強し、そして支援することができる。 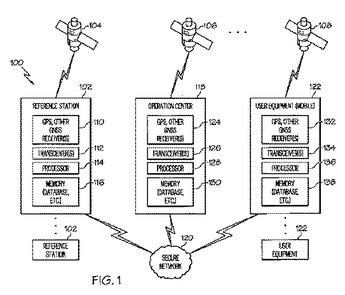 (もっと読む)
(もっと読む)
制御装置、プログラム及び制御方法
【課題】対象物の移送状況に応じて適切な省電力が可能となる制御装置等を提供する。
【解決手段】工作機械3に取り付けられた制御装置2は測位装置を制御する。制御装置2は速度及び振動情報を取得する。制御装置2は取得した速度が所定速度を超える場合に、第1状態と判断する。第1状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期へ変更する。取得した速度が所定速度以下の場合には、第2状態と判断する。第2状態へ移行した場合、制御装置2は測位装置の測位周期を第1周期より短い第2周期へ変更する。第2状態へ移行した後、取得した速度が所定速度を超える場合、制御装置2は第1状態へ移行する。第2状態へ移行した後、取得した振動情報が予め記憶した振動パターンにマッチした場合、制御装置2は第3状態と判断する。
(もっと読む)
位置特定システム、位置特定装置、位置特定方法及びプログラム
【課題】消費電力やコストを抑え、無線タグリーダーを常時設置せずとも物体に貼付した無線タグの位置を特定する。
【解決手段】位置特定システムは、空間1に配置された複数の無線タグのそれぞれの位置情報を記憶し、空間1に配置された位置情報が未知のRFIDタグ4と、複数の位置特定用RFIDタグ2のうち少なくとも3つを共に識別し、当該共に識別した各無線タグからの距離を取得する無線タグリーダー5と、無線タグリーダー5により取得された、複数の位置特定用RFIDタグ2のうち少なくとも3つからの距離と、記憶された当該各位置特定用RFIDタグ2の位置情報とに基づいて、無線タグリーダー5の位置を特定し、無線タグリーダー5が空間1の複数の異なる位置にある場合に特定された各位置と、当該各位置からのRFIDタグ4の距離に基づいて、RFIDタグ4の位置を特定する。
(もっと読む)
ロケーションコンテキスト識別子を用いた移動局ナビゲーションのためのスケーラブルルーティング
本明細書で開示する例は、第1のマップ上で移動局の推定された位置に最も近い、指定量までの当該ポイントを識別することと、識別された当該ポイントのうちの第1の当該ポイントに関連付けられた第1のロケーションコンテキスト識別子によって識別される第2のマップを選択することと、第1のマップと第2のマップとを使用して移動局の推定された位置から目的ポイントへのルートを判断することとに関し得る。 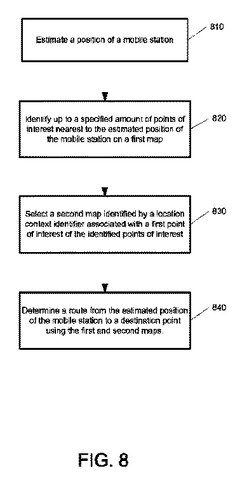 (もっと読む)
(もっと読む)
信号捕捉補助データを取得するためのシステム及び方法
【課題】信号捕捉補助データを取得するためのシステム及び方法を提供する。
【解決手段】信号捕捉補助データは、衛星本体及び基地局のような、任意のソースからの信号を検索する無線所在地補助された位置決定装置のような受信する装置に対して取得される。データは、有効性を危うくすることがある時間及び位置のようなパラメータの変化の評価に基づいて、以前に捕捉されたデータから取得されることができる。特に遠隔エンティティにより提供された捕捉補助データが一般的に提供されてきたものよりもより明確なパラメータを含むのであれば、より正確にされたデータは、信号セットの部分的な測定値を使用して受信機により計算されることができる。補正できない移動局の動きが検出され、以前のデータの有効性が危うくされない限り、新たなデータは、ドップラー係数を使用した時間の外挿の限界のために以前のデータの有効性が消失するまで取得される必要がない。
(もっと読む)
作業車両または農業用車両における器具の定位のためのシステムおよび方法
車両上の器具の定位を決定するためのシステムが提供される。本システムは、車両に取り付けられたカメラと、器具に取り付けられた、カメラの視野内の対象物を含む。対象物は、カメラに対して器具の定位の決定を可能にするマーキングを含む。車両上で器具の定位を決定する方法が提供される。器具定位システムが提供される。器具定位システムを設置する方法が提供される。コンピュータで実行可能な命令を内部に記憶したコンピュータ可読媒体が提供される。コンピュータで実行可能な命令は、実行時に器具の定位を決定する方法をプロセッサに実行させる。 (もっと読む)
目標運動解析方法及び目標運動解析装置
【課題】目標運動解析の解の収束を早め、解の精度を向上させること。
【解決手段】本発明の目標運動解析方法は、センサにて前記目標を探知する探知ステップと、前記センサにて探知された前記目標の探知方位及び探知周波数、該探知された探知時刻、及び、該探知時刻における前記センサの位置情報を含む目標探知情報を生成する生成ステップと、前記センサにて信号を受信可能な探知領域を計算する計算ステップと、前記センサの目標探知情報及び探知領域を使用し、前記センサの探知領域と前記目標の探知方位とが重なる領域を前記目標の存在圏と限定した上で、前記目標の位置を推定する第1の推定ステップと、を有する。
(もっと読む)
測位システム及び測位方法
【課題】 より短い時間で受信機の状態に応じた測位結果を得る。
【解決手段】 測位サーバ10は、セルラ端末20における電波の受信状態を示す受信状態情報を取得する受信状態情報取得部12と、受信状態情報に基づいてセルラ端末20の概算位置を推定すると共に当該概算位置の精度を算出する基地局測位演算部13と、概算位置の精度に基づいて位置の推定を終了するか否かを判断して、終了すると判断した場合には概算位置をセルラ端末20の位置と推定して当該位置の推定を終了させる終了判断部14と、受信状態情報に基づいてセルラ端末20が屋内外の何れにいるかを判定する屋内外判定部15と、終了判断部14による判断の結果、及び屋内外判定部15よる判定の結果に基づいて、セルラ端末20のGPS測位の実行を制御する測位制御部16とを備える。
(もっと読む)
衛星測位システム受信機測位信頼度評価装置
【課題】衛星測位システムの受信機の測位の信頼度の評価の精度を向上させた衛星測位システム受信機測位信頼度評価装置の提供。
【解決手段】移動体に設置された衛星測位システムの受信機の測位信頼度を評価する測位信頼度評価装置であって、受信機の出力に基づいて受信機の測位誤差を推定して、当該測位誤差を第1評価パラメータとして算出する第1評価パラメータ算出部と、衛星測位システムに依拠しない計測手段の出力に基づいて第2評価パラメータを算出する第2評価パラメータ算出部と、少なくとも第1評価パラメータおよび第2評価パラメータを含んだ評価対象データの、所定のデータ集合に対するマハラノビス距離を算出するマハラノビス距離算出部と、マハラノビス距離に基づいて受信機の測位信頼度を評価する信頼度評価部と、を有する、測位信頼度評価装置。
(もっと読む)
タイム・ゾーンおよびDSTへの関与の決定
デバイスのためのローカル・タイム・ゾーン設定が、位置と日付および時刻とに基づいて自動的に提供される。地理的なエリア内でのデバイスの現在の位置に関する位置情報と日付および時刻とが得られる。関連づけが、現在の位置と、地理学的なエリアのうちの地政学的な区域との間で確立され、地政学的な区域は、タイム・ゾーン適用ルールを含む。ローカル・タイム・ゾーン設定が、デイライト・セービング・タイム(DST)への関与を含み得るタイム・ゾーン適用ルールと現在の日付および時刻とに基づいて自動的に提供される。 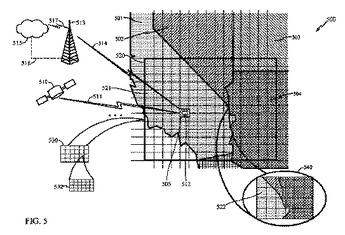 (もっと読む)
(もっと読む)
測位システム及び測位方法
【課題】 測位に対する要求に応じて、適切な測位時間及び測位精度での測位を行う。
【解決手段】 測位サーバ10は、セルラ端末20における受信状態を示す受信状態情報に基づいて屋内外判定を行い、屋内外判定の結果に基づいて測位の終了条件を決定するハイブリッドアルゴリズム1によってセルラ端末20の測位を行う第1測位部12と、セルラ端末20における受信状態を示す受信状態情報に基づいてセルラ端末20の概算位置を算出して、当該概算位置の精度に基づいて、セルラ端末20の測位を終了するか否かを判断するハイブリッドアルゴリズム2によってセルラ端末20の測位を行う第2測位部13とを備える。
(もっと読む)
281 - 300 / 1,399
[ Back to top ]