
Fターム[5J062FF01]の内容
Fターム[5J062FF01]に分類される特許
161 - 180 / 1,399
推測航法を使用して車両の位置及び方位を追跡する方法並びにその方法を実行する追跡装置
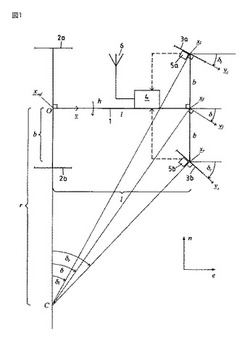
【課題】本発明の目的は、請求項1に記載の前提部に従う車両の位置及び方位を記録する方法の精度の改良を提供することである。
【解決手段】前輪(3a)及び(3b)の速度に基づく推測航法を使用して車両の位置(xref)及び方位(H)を追跡する方法であって、前輪(3a)及び(3b)の速度v及び方位変化hから演算される近似的なかじ取り角δapp及び正確なかじ取り角δexを演算し、正確なかじ取り角δexからの逸脱が小さい場合には簡単な公式で算出される近似的なかじ取り角δappを使用し、逸脱が大きい場合には正確なかじ取り角δexを使用して、車両の位置(xref)及び方位(H)を追跡する方法。
(もっと読む)
方位角推定装置及びプログラム

【課題】マルチパスを適切に判定して、精度良く移動体の方位角を推定する。
【解決手段】複数のGPS衛星の各々から発信されたGPS情報を取得し、方位角推定部30で、GPS情報に基づいて自車両の方位角(推定方位角)を推定する。最適推定部62は、ジャイセンサ14の検出値に基づいて自車両の方位角(観測方位角)を算出し、推定方位角と観測方位角とを統合して最適値を推定する。精度判定部64は、最適値と推定方位角との残差の分散が閾値以下か否かに基づいて、最適値の精度を判定する。速度ベクトル算出部66は、最適値の精度が高いと判定された場合には、最適値を推定する方位角として採用し、最適値及び速度センサ16で検出された速度を用いて速度ベクトルを算出し、精度が低いと判定された場合には、過去に推定された方位角を用いてジャイロセンサ14の検出値を積算して算出した方位角を採用して、速度ベクトルを算出する。
(もっと読む)
ワイヤレス・デバイスの位置検出をし易くするためにセル送信機パラメータを自動的に決定するシステム
【課題】送信機を検出し、キー送信機情報を識別し、基地局送信信号を利用して位置検出を実行する自動方法、加えて、複数のワイヤレス・ネットワークの一部であるセル・サイト送信信号を使い易くするワイヤレス・デバイスの位置検出をし易くするためにセル送信機パラメータを自動的に決定するシステムを提供する。
【解決手段】移動局(MS)が、ワイヤレス・ネットワーク内部において地理的に分散する基地局が送信する信号の測定を行うことを伴う。一部のキー・サイト情報が、送信機の位置、送信信号電力、信号伝搬、および送信信号タイミングのように、これらの送信機に関することが分かっている場合、MSによるこれら送信信号の測定を用いて、MSの位置を判定することができる。
(もっと読む)
SUPLプラットフォームを応用した小型基地局の測位方法及びそのシステム
【課題】従来のフェムトセル基地局の初期位置算出時間が長くなりすぎたり、受信信号の不良により、測位不能となったりする問題点を解決するSUPLプラットフォームを応用した小型基地局の測位方法及びそのシステムを提供する。
【解決手段】SUPLプラットフォームを応用した小型基地局の測位システム1は、複数の移動通信ネットワーク基地局13、SUPLプラットフォーム12、測位ユーザプレーン14及び小型基地局11を備える。SUPLプラットフォーム12には、複数の移動通信ネットワーク基地局13の位置情報を取得するために用いるSUPL位置センター122と、通信を構築するために用いるSUPL測位センター121とが配置される。測位ユーザプレーン14は、SUPLプラットフォーム12に接続される。小型基地局11には、SUPLプラットフォーム12と通信を構築するために用いるSUPLプログラムが設けられる。
(もっと読む)
移動体用測位装置及びカーナビゲーション装置
【課題】測位精度を維持しながら省電力化が可能な移動体用測位装置を提供する。
【解決手段】GPS受信器10で、GPS衛星から送信される信号を受信し、受信した信号に基づいて車両の現在位置を検出する。制御部40では、車速センサ20により検出した車両の走行速度と方位センサ30で検出した車両の方位に基づいて、車両の現在位置を推測する。推測した車両の現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正した後、GPS受信器10の電源をオフし、その時点から、車速センサ20の車速検出誤差及び方位センサ30の方位検出誤差のうち少なくとも1つの誤差の時間経過に伴う累積値に基づき、車両の推測現在位置の誤差を算出し、誤差が予め設定した許容範囲を超えたときに、GPS受信器10の電源をオンして、車両の推測現在位置をGPS受信器10により検出した車両の現在位置に基づいて補正するという動作を繰り返す。
(もっと読む)
移動デバイスロケータシステム
【課題】デバイスの位置をリファインするコンピュータ実行方法を提供すること。
【解決手段】移動デバイス(204)は、アプリケーションプログラミングインターフェース(API)(222)を介して配置され得る。デバイスのロケーションはファジー理論を用いてリファインされ得る。不正確な入力(702)は、規則ベース(706)において特定の大きさを決定するよう進められる。規則ベースにおける規則は、大きさに基づき適用され、正確なロケーションを計算するために利用される論理演算結果を作成する。さらに、外部データベースにおけるユーザのプロファイル情報は、ロケーションをイネーブルにされ得る。データベース、外部キー、位置情報からプロパティを抽出するユーザのプロファイル情報、データソース情報、SQL命令文を有するスキーマ定義がデータベースに格納され、格納された情報へのアクセスが提供される。
(もっと読む)
測位システム、測位方法、及び測位プログラム
【課題】第2の測位方式による測位結果の実測値をもとに、第1の測位方式による測定位置における第2の測位方式による測位の可否を判定する測位システムにおいて、第2の測位方式による測位が不可と推定されたことにより、その測定位置での第2の測位方式による測位が行われないままになることを防止する。
【解決手段】測位制御部210は、第1の測位方式による測位で取得された測位要否判定対象である測定位置と測位情報記憶部220に記憶された測位情報とをもとに、第2の測位方式による測位が成功する確率と当該確率の推定精度とを算出し、第2の測位方式による測位が成功する確率の推定精度が所定の精度以下の場合、第2の測位方式による測位を行い、当該測位要否判定対象である測定位置と当該第2の測位方式による測位可否とを設定した測位情報を測位情報記憶部220に保存する。
(もっと読む)
測位データ管理サーバ及び測位データ管理方法
【課題】測位システムの不具合の原因究明及び不具合解消のための対応を迅速に行う。
【解決手段】本発明の測位データ管理サーバは、ネットワークに接続される通信装置と、前記通信装置に接続される処理装置と、前記処理装置に接続される記憶装置と、を備え、複数の領域に対応する複数のノードと、隣接する前記領域間を接続する通行可能な経路に各々が対応する複数のリンクと、の接続関係を示すネットワークデータを保持し、端末装置が位置する領域を示す位置情報と、前記位置情報が取得された時刻と、の複数の組を含む測位データを保持し、前記ネットワークデータと、前記測位データとを比較することによって、前記保持された測位データの連続性を判定し、前記連続性の判定結果に基づいて、測位の不具合が発生した領域を特定する。
(もっと読む)
測位装置、測位方法およびプログラム
【課題】 自律航法測位と間欠的なGPS測位とを併用して移動経路中の各地点の位置データを取得していく場合に、間欠的にGPS測位を実行するタイミングを適切に決定することのできる測位装置、測位方法およびプログラムを提供する。
【解決手段】 GPS測位手段に間欠的に測位を行わせる(S11〜S14)一方、この間欠的な測位の間に自律航法測位手段に連続的に測位を行わせて(S5,S6)移動経路に沿った位置情報を取得していく測位制御手段を備え、前記測位制御手段は、基準地点と測位地点との二点間距離を算出する距離算出手段(S8)と、距離算出手段により算出された二点間距離に基づきGPS測位手段の間欠的な測位の実行タイミングを制御する測位タイミング制御手段(S10)とを有する。
(もっと読む)
運転評価装置
【課題】GPS受信状況によって車両挙動の推定精度が低下する場合にあっても、適切な方法で運転評価値を算出して表示する。
【解決手段】運転安定度評価装置は、GPS受信信号を取得し(S101)、GPS受信信号に受信時刻を設定し(S102)、車両の速度を算出し(S103)、車両の現在位置と受信時刻と車両の速度に基づいて車両の挙動の推定値を算出し(S104)、受信時刻から求められる車両の現在位置の更新時間に基づいて、挙動推定値の精度を算出する(S105)。そして、この挙動の推定値と挙動推定値の精度に基づいて、走行に関する評価値を算出し(S107)、その評価値を表示する(S108)。
(もっと読む)
受信装置及び受信方法
【課題】通信フレームが検出された時刻と実際の受信時刻との差をできるだけ小さくする
【解決手段】各受信部2は、それぞれ同一の通信フレームを受信する。各遅延部5は、受信部2のそれぞれから入力した通信フレームの位相が一致するように、それぞれの通信フレームを遅延させる。通信フレーム取得部6は、各遅延部5から入力したそれぞれの通信フレームを合成することで1つの通信フレームを取得する。遅延部5と並列に設けられたT1計測部8、演算部9、前値比較部10、1・2系比較部11及び選択部12は、協働して、受信部2から入力した通信フレームのフレームパルスを検出した時刻を特定する。
(もっと読む)
移動端末、移動通信システム、プログラムおよび制御方法
【課題】2つの測位方式により取得したデータを、より効率的に表示する。
【解決手段】第1測位手段11は、GPS方式により、自装置の位置を示す第1位置情報を取得する。第2測位手段12は、測位サーバ20を用いた方式により、自装置の位置を示す第2位置情報を取得する。第2方式は、第1方式よりも位置情報の精度が低く、かつ位置情報の取得にかかる時間が短い方式である。この例で、第2測位手段12は、測位サーバ20から送信される測位情報を用いて第2位置情報を取得する。施設情報取得手段13は、施設を識別するための複数の施設情報を、ネットワーク40上の情報提供サーバ30から第2位置情報に応じて取得する。並べ替え手段14は、施設情報取得手段13により取得された複数の施設情報の順序を、第1位置情報に基づいて並べ替える。表示手段15は、並べ替え手段14により順序が並べ替えられた複数の施設情報を表示する。
(もっと読む)
衛星送信端末および衛星送信方法
【課題】SSO衛星との通信時間を確保しつつ、小型軽量化および低消費電力化を図る。
【解決手段】衛星送信端末110は、GPS衛星(航法衛星)102から送信されるGPS信号(衛星信号)を受信する衛星信号受信部162aと、受信されたGPS信号を復号して地方時を導出する衛星信号復号部162bと、降交点通過地方時または昇交点通過地方時と、衛星通過ウインドウ幅とに基づいて、SSO衛星へのデータの送信を開始する時刻である開始時刻と、SSO衛星へのデータの送信を終了する時刻である終了時刻とを導出する時刻導出部172と、電源の供給を受けている間、SSO衛星104にデータを送信する送信部154と、導出された地方時が、開始時刻から終了時刻までに含まれている間、送信部154への電源の供給を行う電源供給部160とを備える。
(もっと読む)
全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザ
【課題】全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザを提供する。
【解決手段】少なくとも1つの割り当てられたGNSS周波数帯内の信号強度データを決定するための装置が提供される。装置は、GNSSアンテナを含む。GNSSアンテナは、割り当てられたGNSS周波数帯内の信号を受信する。装置は、受信回路網をさらに含む。受信回路網は、受信された信号を復調するためのものである。装置は、プロセッサ、およびプロセッサにより実行可能な命令を記憶するためのメモリをさらに含む。命令は、復調された信号に基づいてGNSSに割り当てられた周波数帯内の受信された信号に対する信号強度データを生成するための命令、および復調された信号に基づいて関心のある地点に対する位置を決定するための命令を含む。
(もっと読む)
位置教示システム
【課題】対象物及び携帯端末の構成が簡易であるとともに、携帯端末の大型化が抑制された位置教示システムを提供する。
【解決手段】カーファインダシステム3は、電子キー1に設けられた複数のアンテナ14a,14b,14cから車両2側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、車両2に設けられたアンテナが受信することで、車両2のアンテナから発信された探索信号Sseを電子キー1が同時受信したかのように取り扱うとともに、探索信号Sseから到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部21bを備える。そして、カーファインダシステム3は、位置推定部21bが演算した位置情報を車両2から発信し、位置情報を電子キー1が受信して表示部19によって使用者に教示する。
(もっと読む)
構内無線システム
【課題】IMES送信機を利用して各無線端末装置の位置登録を行うことにより、エリアカバー率および位置検出精度の向上を可能にした構内無線システムを提供する。
【解決手段】BS呼び出しエリア6,7内にIMES送信機8〜13を設け、少なくとも一台の無線端末装置の定期位置登録機能は、IMES送信機8〜13からIMES取得情報を取得したときにはIMES取得情報を付加した定期位置登録データを構内交換機1に送信するように構成し、また構内交換機1の定期位置登録機能は、各無線端末装置14〜16から受信した定期位置登録データにIMES取得情報が含まれているときの位置情報と、各無線端末装置14〜16から受信した定期位置登録データにIMES取得情報が含まれていないときのBS呼び出しエリア情報のみの位置情報とのいずれかを用いて位置管理を行う。
(もっと読む)
位置教示システム
【課題】携帯端末の大型化を抑制しつつ、マルチパスに対応可能である位置教示システムを提供する。
【解決手段】カーファインダシステム3は、車両2に設けられた複数の発信アンテナから電子キー1側で各発信アンテナの信号が区別可能に発信された探索信号Sseを、電子キー1に設けられたアレーアンテナ15aが受信することで、車両2の各発信アンテナから発信された信号を平均化処理して、到来方向推定法によって電子キー1に対する車両2の位置を推定演算する位置推定部11bを備える。そして、カーファインダシステム3は、位置推定部11bが演算した位置情報を表示部19によって使用者に教示する。
(もっと読む)
車両用軌跡推定装置
【課題】GPS受信装置がGPS衛星からの信号に基づいて算出する情報をカルマンフィルタの観測量に用いることで、自立センサの誤差を推定し、推定したセンサ誤差を補正する技術において、カルマンフィルタで用いるGPS測位結果の精度の劣化を全体として抑える。
【解決手段】カルマンフィルタは、観測量として、使用対象の複数のGPS衛星毎に、当該GPS衛星の擬似距離およびドップラー周波数について、その量をGPS衛星からの信号に基づいて算出した値とその量を推測航法で算出した値との乖離量を採用するタイトカップリング型である。当該車両用軌跡推定装置は、当該カルマンフィルタにおける上記乖離量についてのカイ自乗値と所定の閾値とを比較し(S451)、当該カイ自乗値が当該所定の閾値以上である場合、使用対象の複数のGPS衛星毎うち精度の低い一部を選び、選んだ当該一部を使用対象から除外する(S452)。
(もっと読む)
ナビゲーション信号送信装置および位置情報提供装置
【課題】屋内測位送信機からの測位信号による測位時間の短縮を実現することが可能なナビゲーション信号送信装置および位置情報提供装置を提供する。
【解決手段】情報提供サーバ1230は、携帯電話機1200から送られてくる送信機1210の送信機IDを認識すると、送信機IDに関連付けられているデータベースを参照して、そのIDに関連するSVG地図情報(地図を表示する情報と送信機IDと送信機の当該地図上の位置との対応関係の情報とを含む)を読み出す。情報提供サーバ1230が、SVG地図情報のデータを基地局1240に対して送信すると、基地局1240は、そのSVG地図情報のデータを無線発信する。携帯電話1200は、そのデータの着信を検知すると、携帯電話1200の使用者による閲覧操作に従って、そのデータから、送信機1210の位置を取得することができる。
(もっと読む)
携帯端末及びプログラム
【課題】測位を繰り返す事前設定が携帯端末になされていない場合であっても、乗り過ごし防止機能を作動させる。
【解決手段】携帯端末は、GPS測位方式に従って自端末の位置を計測する測位部を有し、自端末が高速移動中であることを検知した場合に(S1;YES)、測位部に繰り返し測位させる自動測位を開始する(S2)。携帯端末は、自動測位が可能と判定した場合(S3;YES)、GPS測位方式に従う測位結果に基づいて、列車に自端末のユーザが乗車中であるか否かを判定する(S5)。携帯端末は、乗車中であると判定した場合(S5;YES)、測位部が計測した位置とユーザが降車予定駅とに基づいて、降車予定駅に接近したことをユーザに報知する(S6〜S9)。携帯端末は、高速移動という列車に乗車中に生じる事象の検知を契機に自動測位を開始するので、自動測位に関する事前設定に関わらず、乗り過ごし防止機能を作動させる。
(もっと読む)
161 - 180 / 1,399
[ Back to top ]