
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
241 - 260 / 454
電波領域図面作成方法、プログラムおよび記録媒体
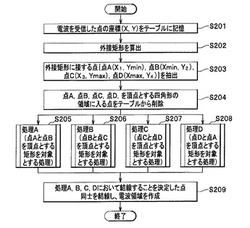
【課題】電波を受信できた測定点をもとに、電波領域の図面を作成するプログラムを提供する。
【解決手段】 本発明のプログラムでは、電波を受信できた点(測定点)の座標(X,Y)がテーブルとして記憶部に記憶され(S201)、次に、テーブルに記憶された点の外接矩形が算出される(S202)。そして、外接矩形に接する点A、点B、点C、点Dが抽出される(S203)。なお、点AはY軸の最小値を有し、点BはX軸の最小値を有し、点CはY軸の最大値を有し、点DはX軸の最大値を有する。そして、点A、点B、点C、点Dを頂点とする四角形の領域内に存在する点がテーブルから削除される(S204)。次に、処理A、処理B、処理C、処理D(S205〜S208)において、不要な点をテーブルから削除する。そして、テーブルに残された点を結線し、電波領域の図面が作成される(S209)。
(もっと読む)
埋設深さ測定方法及びその装置

【課題】埋設物の埋設深さの測定誤差を低減し、測定精度を上げることを目的とする。
【解決手段】検査媒体中に埋設された埋設物の埋設深さ測定方法である。送信部と受信部を平面上に近接配置した第1送受信ユニット26の第1送受信データと、前記第1送受信ユニット26と同一平面上であって送信部と受信部の中心に前記第1送受信ユニットの中心を配置した第2送受信ユニット30の第2送受信データとから得られる最も短い反射時間の伝播速度を演算処理して、見かけ上の埋設物の埋設深さを求め、前記埋設物の埋設深さに対して送受信ユニットと検査媒体との間の空隙により生じる屈折率の補正を行い、実際の反射時間を求めて前記埋設物の埋設深さを補正演算する。
(もっと読む)
位相同期発振器及びそれを用いたマルチレーダシステム
【課題】与えられた周波数帯域をより効率的に利用することができるマルチレーダシステムを提供する。
【解決手段】周波数が周期的に増減する信号を生成して出力する複数のレーダを含んで構成されるマルチレーダシステムであって、各レーダは、周期的に増減する周波数の上限値及び下限値が各レーダの信号毎に互いに異なり且つ当該上限値及び下限値になるタイミングが各信号毎に互いにほぼ一致するように所定の同期信号に同期して信号を生成し、出力する。これにより、電波干渉を生じさせずに、各信号の周波数間隔を詰めることができ、より多くのチャネルを設定することができる。
(もっと読む)
DME地上装置
【課題】マルチパス環境下におけるシステム遅延を、容易に調べることのできる機能を有するDME地上装置を提供すること。
【解決手段】DME地上装置10の監視制御部14内のマルチパス試験部23は、擬似質問信号を発生する擬似質問信号発生部24と、この擬似質問信号発生部24により発生した前記擬似質問信号に所定の遅延及び位相を付与し反射波としての擬似質問信号を生成する擬似信号生成手段25、26と、この擬似信号生成手段25、26により生成された反射波と擬似質問信号発生部24により発生された信号である直接波とを合成する信号合成手段27とを具えるようにする。
(もっと読む)
個体管理装置及びプログラム
【課題】複数の個体の位置情報を正確に管理することが可能な個体管理装置を提供する。
【解決手段】複数の個体それぞれが保有する位置検出器(無線ICタグ52)を用いて検出される位置情報に応じた第1の行動履歴を保持する第1の保持手段(行動ログ収集サーバ50)と、第1の行動履歴とは異なる種類の、各個体に関する第2の行動履歴を保持する第2の保持手段(出退勤管理サーバ18)と、第1の行動履歴と第2の行動履歴とに基づいて、各個体と各個体が保有する位置検出器(無線ICタグ52)との関係を評価する評価手段(行動ログ収集サーバ50)と、を備える。
(もっと読む)
クロック周波数オフセットに起因する2つのトランシーバ間の双方向測距の誤差を低減するための方法
【課題】周波数オフセットに起因するトランシーバ間の双方向測距の誤差を低減する。
【解決手段】第1のトランシーバが、要求フレームを送信し応答フレームを受信する間の時間CA1と、応答フレームの最初の情報ビットを受信し応答フレームの最後の情報ビットを受信する間の時間CA2とを測定する。第2のトランシーバが、要求フレームを受信し応答フレームの最後の情報ビットを送信する間の時間CB2と、要求フレームの最初の情報ビットを受信し要求フレームの最後の情報ビットを受信する間の時間CB1とを測定する。補正係数
が
により適用される。
(もっと読む)
検査方法及び検査装置
【課題】送信アンテナから受信アンテナに直接到来する干渉波の影響を抑制する。
【解決手段】検査装置は、直線S1に沿って配列された送信アンテナ21−1〜21−4、直線S1に平行な直線S2に沿って配列された受信アンテナ22−1〜22−4、送信信号を生成する発振器、送信信号が入力される検波器、スイッチ、画像処理装置を具備する。送信アンテナ21−1は、送信信号に基づいて電波を出力する。受信アンテナ22−2は、受信した電波に基づいて受信信号を出力する。スイッチは、送信アンテナ21−1と発振器が接続されているときに、受信アンテナ22−2と検波器とを接続する。検波器は、受信信号に基づいて検波信号を生成する。画像処理装置は、検波信号に基づいて画像のデータを生成する。送信アンテナ21−1と受信アンテナ22−2との距離は、送信アンテナ21−1と受信アンテナ22−1との距離より長い。
(もっと読む)
地中探査レーダ用アンテナ
【課題】地中埋設物の3次元の位置を迅速にかつ正確に検出する。
【解決手段】導電性アンテナハウジング2に形成された複数の部分収納空間に、送受信一対のアンテナ素子1a,1b;1c1,1c2;1d1,1d2の3組が配置される。これらのアンテナ素子は、一対の導体5a,5b,5c1,5c2,5d1,5d2,6a,6b,6c1,6c2,6d1,6d2が一直線上に配置されて、ダイポールアンテナを構成する。導体は、波長をλとするとき、λ/2の長さを有し、1組のアンテナ素子1a,1bと各組のアンテナ素子1c1,1c2;1d1,1d2とは、これらの導体の長手方向に、λ/2だけずれて配置される。各組の送信アンテナ素子1a,1c1,1d1に与えられるパルス状送信信号と、各組の受信アンテナ素子1b,1c2,1d2から得られる受信信号との時間差に基づき、地中埋設物の距離、したがって位置を検出することができる。
(もっと読む)
物体位置特定システム、物体位置特定方法、物体位置算出装置、及びコンピュータプログラム
【課題】複数の物体が混在する室内環境であっても、対象となる物体の位置を精度良く特定することができる物体位置特定システム、物体位置特定方法、物体位置算出装置、及びコンピュータプログラムを提供する。
【解決手段】センサが移動状態である旨を検知した時刻情報及び識別情報を外部へ送信することが可能な電子タグ、人間の存在する位置に関する位置情報を外部へ送信することが可能な人間位置特定手段、及び電子タグを装着した物体の位置を算出する物体位置算出装置を備える。物体位置算出装置は、人間の位置変化の加速度を算出し、算出した加速度の変化に応じて人間が移動している時間帯を推定する。センサが移動状態と検知した時間帯に人間が移動している時間帯が含まれる場合、移動状態と検知した時間帯の最終の時刻での人間の位置情報を、電子タグを装着した物体の位置情報として記憶する。
(もっと読む)
レーダ装置
【課題】受信レベルの大きさを比較することで周波数の正負の判定を可能にして、送信周波数の増加中または下降中の組み合わせ処理を不要にしたレーダ装置を得る。
【解決手段】送信波を送信する送信部と、送信波の反射物体6からの反射波を並列に受信する複数の受信部と、送信波と各受信部で受信された受信波とから、受信部ごとのビート信号を取得するビート信号生成部と、受信部ごとのビート信号を個別に処理するビート信号処理部20と、ビート信号処理結果をDBF処理するDBF処理部23と、DBF処理結果またはビート信号処理結果の周波数成分から、反射物体6の距離、速度、角度の情報を取得する物体検出部24とを備え、ビート信号処理部20は、位相補正処理部22を含む。受信部ごとの位相遅れ量は、相互に異なる値に設定され、位相補正処理部22は、ビート信号処理部20での受信部ごとに対応した位相遅れ量が等しくなるように補正する。
(もっと読む)
合成開口レーダ装置
【課題】合成開口レーダ装置の移動に伴う観測目標との位置関係の差異に係る電波反射特性の影響を受けない合成開口レーダ装置を提供する。
【解決手段】合成開口レーダ装置は、アップチャープパルス信号とダウンチャープパルス信号とを同時に発生する送信部(1)と、アップチャープパルス信号またはダウンチャープパルス信号の一方の信号を送信する垂直偏波アンテナ(5a)と、他方の信号を一方の信号と同時に送信する水平偏波アンテナ(5b)と、垂直偏波アンテナで受信され2分配された信号の一方をアップチャープ圧縮する第1のアップチャープ圧縮回路(12a)および他方をダウンチャープ圧縮する第1のダウンチャープ圧縮回路(12b)と、水平偏波アンテナで受信され2分配された信号の一方をアップチャープ圧縮する第2のアップチャープ圧縮回路(12c)および他方をダウンチャープ圧縮する第2のダウンチャープ圧縮回路(12c)と、を備える。
(もっと読む)
電波スイッチ
【課題】従来の電子スイッチにおいては電子画面装置の画面を切替える際、少ない動作で簡単に操作することができなかった。
【解決手段】
電波を発生する発振回路と、電波を被検知体に向けて放射する送信アンテナと、前記送信波の物体による反射波を受信波として受信する受信アンテナと、送信波を複数の方向に向けて放射するように電波の放射方向を切替制御する電波方向切替回路と、前記受信波を検知する検波回路と、前記検波回路から出力されるドップラー信号と、その時の送信波を放射している方向とから、被検知体の動作状態を判断し、確定する判断回路と、を備え、前記電波方向切替回路により送信波を所定の方向へ順次切り替え、前記判断回路が、複数の方向に向けて放射された送信波のいずれか一つの放射方向にて被検知体を検知し、動作状態を確定した時に、前記判断回路の結果を外部へ出力する出力回路とを備えた電波スイッチを提供する。
(もっと読む)
アンテナビームの方向を制御するための方法およびシステム
【解決手段】
実施例において、アンテナビームの方向を制御するシステムは、位置識別器、方位センサ、および、アンテナビーム・コントローラを含む。位置識別器は、送信アンテナの位置を示すアンテナの位置を計測する。送信アンテナはアンテナビームを発生させる。方位センサは、送信するアンテナの方位を示す送信アンテナの方位を測定する。アンテナビーム・コントローラは:目標の受信アンテナを記述した目標データにアクセスし(目標データは、送信ンテナに対応する受信アンテナの位置を含む)、送信アンテナの位置、送信アンテナの方位および目標データからの偏差、の値を計算し、かつ偏差の値を下げるためにアンテナビームの方向を調整する。 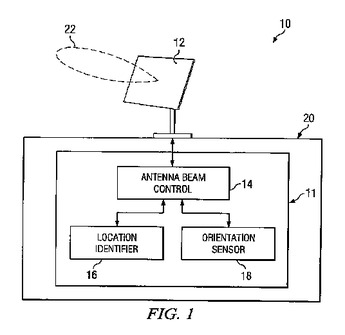 (もっと読む)
(もっと読む)
方向探索システム
【課題】簡易な操作で目的の自動車が存在する方向を示すことができる方向探索システムを提供する。
【解決手段】第1回目のスキャンで、スイッチ31を押しながらスマートキー等の鍵金属部を指向性のあるアンテナ10として利用した端末装置2を回転させ、探索対象の自動車に搭載された車載装置1からの無線信号を受信し、その最大受信レベルをピーク検出保持部27に保持する。第2回目のスキャンでは、スイッチ31を離し、再び端末装置2を回転させ、探索対象の自動車に搭載された車載装置1からの無線信号を受信する。このとき、レベル検出部25で検出した受信レベルを比較部28に与え、第1回目のスキャン結果で保持された最大受信レベルと比較する。そして、受信レベルが最大受信レベルにほぼ等しくなったときに、探索が達成したことを表示部40に表示する。
(もっと読む)
高周波センサ装置
【課題】放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供すること。
【解決手段】送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、前記送信波と、前記受信波と、の周波数成分の差を抽出し、ドップラー信号を出力する差分検出部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、パッチ電極を有する無給電素子と、を含み、前記アンテナのゲインが最大ゲインから3dB以内の範囲が、前記パッチ電極を含む平面に対して垂直であり前記給電素子と交差する垂直面により区切られる2つの空間のいずれか一方のみに局在するように前記無給電素子が配置されていることを特徴とする高周波センサ装置を提供する。
(もっと読む)
複合モードレーダ装置
【課題】狭帯域レーダと広帯域レーダとを一体化して協調動作させることで、高性能で高機能な角度測定手段を実現する複合モードレーダ装置を提供する。
【解決手段】複合モードレーダ装置100は、狭帯域レーダ部102と広帯域レーダ部103とが同じ筐体内に設けられており、演算部101からの制御で両者が協調して動作するように構成されている。また、狭帯域レーダ部102及び広帯域レーダ部103で測定されたデータはともに演算部101に入力され、両者から入力した検知データをもとに演算部101で測角を高精度に行えるようにしている。狭帯域レーダ部102は第1の周波数を中心周波数とする狭帯域信号を、また広帯域レーダ103は第2の周波数を中心周波数とする広帯域信号を、それぞれ角度測定に用いている。
(もっと読む)
対象物検出装置
【課題】シングルビーム方式のレーダ装置を用いて車両の周囲に位置する対象物が存在するレーン位置を特定する対象物検出装置を提供する。
【解決手段】検出範囲にある対象物までの距離のみを検出可能なシングルビーム方式の右方レーダ装置4及び左方レーダ装置5を備え、各レーダ装置4、5のパラメータ情報と、車両2の現在位置情報と、車両2が走行する道路の道路形状情報とに基づいて、各レーダ装置4、5により特定のレーン内に位置する対象物を検出可能な対象物存在範囲70、71を算出し、検出した対象物までの距離に基づいて対象物のレーン位置を特定するように構成する。
(もっと読む)
無線通信装置および無線通信装置における距離測定方法
【課題】通信への制約及び通信からの制約を抑えかつ精度の高い測距が行える無線通信装置および無線通信装置における距離測定方法を提供する。
【解決手段】電波の伝播遅延時間により通信相手の無線通信装置との距離を検出する方法であって、搬送波から無線通信フレームの終了を検出し、自身が送信する第1無線通信フレームの送信終了タイミングから通信相手の無線通信装置からの第2無線通信フレームの受信終了タイミングまでの第1フレーム終了間時間と、送られてくる通信相手の無線通信装置での前記第1無線通信フレームの受信終了タイミングから前記第2無線通信フレームの送信終了タイミングまでの第2フレーム終了間時間を計測する工程と、前記第1フレーム終了間時間と第2フレーム終了間時間の時間差から通信相手の無線通信装置との距離を演算する工程と、を備えた。
(もっと読む)
空港面監視装置
【課題】2つのレーダの覆域が部分的に重なった重畳エリアで航空機の識別を容易にする空港面監視装置を提案する。
【解決手段】サイトマップ設定手段が、基準点品質信号に基づいて、複数のサイトマップの中から所定のサイトマップを選択し、この選択された所定のサイトマップに基づいて、第1サイトの目標検出信号と第2サイトの目標検出信号に通過エリアを設定し、またサイト選定処理手段が、基準点品質信号に基づいて、第1サイトの目標検出信号と第2サイトの目標検出信号のいずれかを選択する。
(もっと読む)
画像レーダ信号処理装置
【課題】現地でのGCP測位の手間を省くことができる画像レーダ信号処理装置を得る。
【解決手段】アンテナ1、2の位置が格納されたアンテナ位置情報格納部3Aと、アンテナ1、2で観測して得られた第1、第2の画像が各々格納されたアンテナ1画像格納部3B、アンテナ2画像格納部3Cと、第1、第2の画像に基づき、第1の画像に対する第2の画像のスラントレンジ方向、アジマス方向の全画素のずれ量を求め、スラントレンジ方向のずれ量を距離差に変換し、アンテナ1の各画素の示す観測点の距離、及び前記距離差に基づき、アンテナ2の各画素の示す観測点の距離を算出する距離算出部4と、各アンテナの位置、アンテナ2の各画素の示す観測点の距離、及びアンテナ1の各画素の示す観測点の距離に基づき、三角測量により各画素の標高を求める三角測量部5と、三角測量部5により得た画像全体の標高分布を格納する出力格納部6とを設けた。
(もっと読む)
241 - 260 / 454
[ Back to top ]