
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
41 - 60 / 454
アレーアンテナ装置
【課題】素子アンテナが波長の数倍から数十倍の間隔で配置されていても全てのグレーティングローブを十分に抑圧するアレーアンテナ装置を得る。
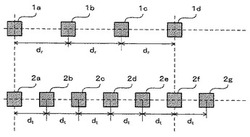
【解決手段】アレーアンテナ装置は、複数の素子アンテナを等間隔かつ一直線上に配置して構成される送信アレーアンテナ及び受信アレーアンテナを備え、互いに素な整数をM、Nとし、受信アレーアンテナの素子アンテナは、素子アンテナのアレー素子パターンにおける第1ヌル発生角近傍に、受信アレーアンテナのアレーファクタの第Mグレーティングローブを有するよう、整数Mに波長を乗算し第1ヌル発生角で除算した商で配置され、送信アレーアンテナの素子アンテナは、送信アレーアンテナのアレーファクタの第Nグレーティングローブの発生角度が第Mグレーティングローブの発生角と一致するよう、整数Nに受信アレーアンテナの素子アンテナの間隔を乗算し整数Mで除算した商からなる間隔で配置される。
(もっと読む)
電磁波イメージング装置

【課題】測定表面が曲面であっても確実にその表面状態をイメージングする。
【解決手段】構造物の曲面に電磁波を複数の送信アンテナからそれぞれ放射する複数の送信回路と、構造物の構造物物の曲面で反射した電磁波を複数の受信アンテナでそれぞれ受信する複数の受信アンテナとを有し、送受信アンテナ13aと送受信回路13bとが一体化された複数のミリ波モジュール13をコンクリートポールCPの曲率に合わせて円弧状にアレイ化して配置する。
(もっと読む)
ドップラーセンサ付き照明器具
【課題】 消費電力の抑制が可能なドップラーセンサ付き照明器具を提供する。
【解決手段】 ドップラーセンサ1は、所定の周波数の送信信号を生成する発振器3と、送信信号が入力されている期間中にそれぞれ異なる検出範囲に対して電波を送受信することでドップラー信号を生成する複数個の送受信回路4a,4bと、発振器3からの送信信号を入力する送受信回路4a,4bを周期的に切り替える切替回路7とを備える。1個の送受信回路4a,4bに連続的に送信信号が入力される場合に比べ、人体の検出が可能な範囲全体の大きさと感度との割に消費電力を抑えることができる。
(もっと読む)
レーダ装置及び物標検出方法
【課題】アンテナを回転して送信ビームを放射するレーダ装置及び物標検出方法において、各方位における送受信に要する時間を長くすることなく、クラッタなどからの物標の受信信号成分の分離を行ない易くすることである。
【解決手段】アンテナ20は、回転軸24の周りを回転しつつ各方位において、1パルスの送信ビーム25を放射して反射体からの反射エコーを受信する。仰俯角方向走査部30は、1パルスの送信ビーム25を、仰俯角に応じて周波数が異なるように、方位毎に仰俯角方向に走査する。受信部60は、周波数成分検出部62によって、アンテナ20で受信した受信信号の周波数成分から反射体の仰俯角を検出する。同時に、受信部60は、振幅成分検出部61によって、受信信号の時間成分から反射体の距離を検出する。
(もっと読む)
レーダ装置
【課題】対象物の水平方向と鉛直方向の両方の角度を検出できるレーダ装置を得る。
【解決手段】全てのアンテナは、水平面と直角となる平面である鉛直面に配置され、かつ長方形である開口面の長手方向が鉛直方向に配置され、受信アンテナRx1、Rx2は、素子間隔Lhで水平方向に配置され、送信アンテナTx1、Tx2は、受信アンテナRx1、Rx2を挟むように、水平方向に配置され、受信アンテナRx3、Rx4は、素子間隔Lvで鉛直方向に配置され、かつ、送信アンテナTx2に隣接して水平方向に配置され、送信アンテナTx1、Tx2から時分割に高周波パルス信号を送信させ、受信アンテナRx1、Rx2によって受信された2つの受信信号の位相差から水平方向の方位角を検出するとともに、受信アンテナRx3、Rx4によって受信された2つの受信信号の位相差から鉛直方向の仰俯角を検出する信号処理器10を備える。
(もっと読む)
センシングシステム、センシング方法及びプログラム
【課題】電磁波によるセンシングを行うよりも対象物のセンシングにおける電力損失を抑えることができるセンシングシステムを提供する。
【解決手段】送信アンテナ16は、電源20に接続されており、入力される電力の一部を受信アンテナ18に伝達する。情報処理装置14は、電源20から出力される電力と、送信アンテナ16から電源20に還る電力と、に基づいて、送信アンテナ16と受信アンテナ18との間の距離に応じた値を特定する。情報処理装置14は、距離に応じた値に基づく処理を実行する。
(もっと読む)
無線周波数識別タグ位置測定方法及び装置
【課題】無線周波数識別RFIDタグ位置測定方法及び装置を提供する。
【解決手段】方法は、コンピュータが、RFIDリーダのアンテナを使用して複数の指定発射電力毎に線形配列となる対象タグを所定回数読み取り、各対象タグについて指定発射電力毎のアンテナによる読取が成功した回数を記録し、各対象タグについてのアンテナによる読取成功回数の合計を算出し、各対象タグ毎の読取成功回数の合計に対してソートすることにより各対象タグのアンテナに対する配列順序を特定し、各対象タグ毎のアンテナに対する正規化の読取確率を算出し、各対象タグ毎のアンテナに対する正規化の読取確率に基づいて、タグのアンテナに対する正規化の読取確率とタグのアンテナに対する距離との対応関係が記録される読取確率マップを検索することにより、各対象タグ毎の前記アンテナに対する距離を特定することを特徴とする。
(もっと読む)
MIMOレーダシステム、送信装置、受信装置及びMIMOレーダ信号処理方法
【課題】 複数のレーダ装置が遠隔に配置されている場合であっても、各レーダ装置で受信された受信信号を同一の成分同士で処理可能なMIMOレーダシステムと、このシステムで用いられる送信装置、受信装置及びMIMOレーダ信号処理方法とを提供する。
【解決手段】 MIMOレーダシステムは、複数の送信装置と、複数の受信装置と、処理サーバとを具備する。送信装置は、送信信号を送信する。受信装置は、原点及び直交軸をそれぞれが共有し、送信信号が目標で反射等された目標反射波を受信する。受信装置は、極座標信号生成部と、信号処理部と、6次元セルデータ処理部とを備える。極座標信号生成部は、目標反射波に基づいて極座標信号を生成する。信号処理部は、極座標信号を、6次元セルデータに変換する。6次元セルデータ処理部は、6次元セルデータを統合して受信結果を取得する。処理サーバは、前記複数の受信装置からの受信結果に基づいて目標を検知する。
(もっと読む)
移動体の計測方法および計測装置
【課題】移動体の移動方向および移動速度を計測できる範囲を大きく確保でき移動体の移動方向や移動速度を的確に計測する上で有利な移動体の計測方法および装置を提供する。
【解決手段】第1乃至第4のアンテナ12A〜12Dは、指向性を有し、供給される送信信号に基づいてゴルフボール2に向けて送信波W1を送信すると共に、ゴルフボール2反射された反射波W2を受信して受信信号を生成し、互いに離間して配置されている。第1乃至第4のドップラーセンサ14A〜14Dは、ドップラー周波数Fdを有する第1乃至第4ドップラー信号SdA〜SdDを時系列データとして生成する。計測処理部20は、予め得られている各アンテナ12A〜12Dを用いて計測された速度と移動方向および移動速度との実測値との相関関係に基づき、測定された各速度から移動方向および移動速度を算出する。
(もっと読む)
目標物探知システム、探知方法、及び探知情報処理プログラム
【課題】レーダ,ソナー,又はライダーから成る送受信機を備えた目標物探索システムにあって、S/N比が低く反射信号が雑音に埋設されそうな環境下にあっても、目標物を有効に捕捉することを可能とした目標物探知システムを提供すること。
【解決手段】方位設定が可能で異なる設置位置にそれぞれ配置された目標物探索用の少なくとも二個の送受信機1,2と、この各送受信機1,2により探索された目標物Mの方位にかかる反射情報に基づいて当該目標物Mの位置を特定する位置算出手段12を備えた主制御装置10とを設け、前記位置算出手段12が、前記二個の送受信機1,2によって得られた目標物Mの方位にかかる情報を、前記各送受信機1,2の位置情報を基準として重ね合わせ処理することにより前記目標物Mの位置を特定する機能を備えていることを特徴とする。
(もっと読む)
SAR装置
【課題】フルポラリメトリSARにおいて、受信した反射波の交差偏波成分(HV成分、VH成分)のレンジS/A(信号対虚像比)が悪くなるという課題があった。
【解決手段】本発明のSAR装置は、H偏波を受信する第一の受信機と、V偏波を受信する第二の受信機と、周波数変調されたパルス信号を生成し、パルス信号を出力する送信機と、パルス信号が入力される度に、入力されたパルス信号の位相を180度毎に切り替え、出力する移相器と、送信機または移相器から出力されたパルス信号をH偏波で送信し、H偏波の受信信号を受信し、受信したH偏波の受信信号を第一の受信機に出力するH偏波アンテナと、送信機または移相器から出力されたパルス信号をV偏波で送信し、V偏波の受信信号を受信し、受信したV偏波の受信信号を第二の受信機に出力するV偏波アンテナと、を有する。
(もっと読む)
レーダ装置、アンテナ制御方法、及びプログラム
【課題】アンテナ開口の方位の変更動作を行う際に、消費電力を抑えつつ、追尾を継続する。
【解決手段】アンテナ開口の方位の変更のために空中線部1−3を駆動させると、空中線部1−2のビーム走査範囲の端から空中線部1−3のビーム走査範囲の端までの範囲が、走査されない範囲となる。空中駆動部1−3を駆動させている間、空中駆動部1−3の駆動によって発生する走査されない範囲をカバーし、かつ空中駆動部1−2、1−3同士のビームの走査範囲が重複しないように、空中駆動部1−2、1−3のそれぞれのビームの走査範囲を逐次変更する。
(もっと読む)
死角車両検出レーダーシステム
【課題】送信波の平均電力が高く、回折波の微弱な信号のS/N比を改善することができ、信号機のない交差点で死角から進入する見通し外の車両等目標物を高精度に検知することができ、出会いがしらの衝突といった事故を減少させることができる死角車両検出レーダーシステムを得る。
【解決手段】送受信信号のビート周波数信号に基づいて測定対象物までの距離を求めるFMCW方式に基づくものであって、回折損の異なる低周波数と高周波の信号を同時に送信し、それぞれに対応した目標物からの反射波を受信する送受信手段(1−7、1’−7’)と、周波数差に基づく回折波の強度差により死角車両を検出する死角車両検出部8とを備える。
(もっと読む)
方位検出装置
【課題】簡易な構成で方位検出範囲の広角化を実現できる方位検出装置を提供する。
【解決手段】送信アレイアンテナを構成するM個の送信側アンテナ素子、受信アレイアンテナを構成するN個の受信側アンテナ素子の組合せであるM×N個のチャンネルCH11〜CHMNのそれぞれについて、デジタルデータD11〜DMNを取得する(S110〜S180)。受信側アンテナ素子ARn が共通するM個のチャンネルCH1n〜CHMn毎にビームフォーミング(FFT)を実行し、その算出結果から、同じ周波数ビンについてのN個の算出結果毎にビームフォーミング(FFT)を実行する。この算出結果から得られる受信強度分布に基づき、物標の方位を抽出する(S190〜S210)。
(もっと読む)
移動無線測位装置
【課題】移動端末の位置を高精度で測位できる移動無線測位装置を安価に実現する。
【解決手段】基準局201の周辺に間隔をおいて複数の中継局202a〜202dを配置し、前記基準局201と複数の中継局202a〜202dとの間を伝送ケーブル101a〜101dを介して接続し、前記基準局201と移動端末203との間で前記複数の中継局202a〜202dを介して双方向通信を行うことによって、前記移動端末203の位置を測位する。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
(もっと読む)
端末装置及びプログラム
【課題】複数のRFタグと一の対象とを対応付ける。
【解決手段】端末装置1は、RFタグとの間で電波の送受信を行うアンテナ16、17と、アンテナ16、17が受信した電波に基づいてRFタグのID情報を取得し、アンテナ16、17が受信した電波の電波強度値をアンテナ16、17のそれぞれについて取得し、取得した電波強度値と当該電波強度値の検出時刻とID情報とを対応付けてアンテナ16、17のそれぞれについて記憶部13の電波強度値遷移テーブル132に記憶させ、電波強度値遷移テーブル132の記憶内容に基づいて、検出時刻の経過に対する電波強度値の変化が同一であるか又は近似する複数のRFタグがあるか否かを判別し、検出時刻の経過に対する電波強度値の変化が同一であるか又は近似する複数のRFタグがあると判別された場合、当該複数のRFタグ同士を対応付けるCPU11と、を備える。
(もっと読む)
観測装置および観測対象推定装置
【課題】移動を伴う多観測角観測装置を用いて被観測体の推定精度を向上させることを目的とする。
【解決手段】多観測角観測装置100はコニカルスキャン方式の移動を伴う観測装置である。多観測角観測装置100は観測角が異なる第一アンテナ131〜第四アンテナ134を備える。観測角が小さいアンテナほど下側に設置し、観測角が大きいアンテナほど上側に設置する。また、設置位置が下であるアンテナほど支持棒の長さを短くし、設置位置が上であるアンテナほど支持棒の長さを長くする。制御装置110は第一回転軸121〜第四回転軸124を第一アンテナ131〜第四アンテナ134それぞれの観測角に応じて異なる速度で回転させる。制御装置110は第一アンテナ131〜第四アンテナ134で受信した観測角が異なる複数の観測信号に基づいて被観測体を推定する。
(もっと読む)
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
(もっと読む)
マイクロ波位置検知システムおよびマイクロ波を使用して位置を検知する方法
【課題】ターボ機械内の多数の対象部品の位置をコスト効率よく監視するマイクロ波位置検知システムを提供する。
【解決手段】マイクロ波位置検知システムは、それぞれが複数の位置の間を移動する複数の対象部品を備える。マイクロ波発生器は、マイクロ波周波数信号を発生させる。分割器は、マイクロ波周波数信号を受け取り、複数の位置検知信号に分割する。分割された位置検知信号は、対象部品のそれぞれの位置を求めるために、複数の対象部品に送られる。また、位置検知信号の各々を校正することもできる。一実施例において、第1および第2の周波が共通の導波路を通って伝送する。第1の周波は、校正信号を生成するために対象部品に到達する前に反射される。対象部品の位置を検知するのに使用される第2の信号は、第1の信号を使用して校正される。
(もっと読む)
41 - 60 / 454
[ Back to top ]