
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
401 - 420 / 454
ロボットの走行軌道制御システム
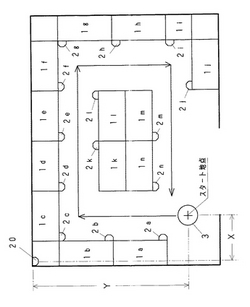
【課題】 ロボットの移動方向を定める上で必要な情報を、ICタグから確実に取得することができる走行軌道制御システムを提供する。
【解決手段】 放射方向に向いた複数のICタグで構成される移動標識モジュールと、走行機能を備えたロボットとからなり、移動標識モジュールをロボットの移動空間内の床、天井、壁、備品、障害物等の物体に取り付けて、移動標識モジュールのICタグに記憶された情報を、いずれの方向からでもロボットが読み取ってロボットが取得した情報に基づいて自律移動するようにする。
(もっと読む)
マイクロウエーブセンサ

【課題】 受動型赤外線センサなどを追加することなく、金属板などによるマスキング行為を検出可能なマイクロウエーブセンサを提供する。
【解決手段】 送信アンテナ部A1の経路上に接続される第1の方向性結合器DC1と、受信アンテナ部A2の経路上に接続される第2の方向性結合器DC2と、これらの各モニタ出力に基づいて、送信アンテナ部A1における反射特性に対応する散乱パラメータS11と送信アンテナ部A1から受信アンテナ部A2への伝送特性に対応する散乱パラメータS21とを求めるとともに、これらの散乱パラメータS11および散乱パラメータS21の少なくとも一方がそれぞれに予め定められた所定範囲外の値となる状態が所定時間以上継続したときに警告信号Dout2を出力する判定部4とを備える。
(もっと読む)
飛行時間決定装置及び方法
第1及び第2装置(7,8)は、無線で信号を送受信し、第1及び第2クロックをそれぞれ、信号送信時間及び信号到達時間を決定するために有する。第1装置は第1及び第2信号(9,10)を送信し、第2装置は第3信号(11)を送信する。遅延を第1信号に導入することにより、泥棒は、それらの装置が実際より近いと考えるように装置をだますことができる可能性がある。遅延が第1信号に導入されたかどうかを特定するように支援するように、第1装置は、第1及び第2クロックについてクロックレートの比を演算し、演算された比が所定範囲に入るかどうかを決定する。  (もっと読む)
(もっと読む)
方位分解能を高めるビーム形状
【課題】高い方位分解能をもち、死角を検知しうるレーダーシステムを提供する。
【解決手段】車両用レーダーシステムが、ビーム形成回路とビーム合成回路とを備えるようにする。ビーム形成回路は、複数のビームポートに、複数のアンテナビームを与える。ビーム合成回路は、ビーム形成回路から複数のアンテナビームを受け取り、これらのアンテナビームを合成して、所望の数のアンテナビームを作り出す。ビーム合成回路がつくり出す所望の数のアンテナビームにおいては、両端の第1および第2のビームの各ビーム幅が、中間のビームのそれよりも狭い。
(もっと読む)
2つの無線通信装置間の距離を測定する方法およびその方法を実施するように適合された装置
本発明は、2つの無線通信装置(1、2)の間の距離を測定する方法に関し、無線信号の交換遅延を測定することにある。本発明によれば、各信号の伝搬時間は交換遅延から計算され、続いて、2つの装置の間で伝送される単一のチャネル測定フレームの分析を使用して補正される。補正された伝搬時間は、無線信号がたどる最短の伝搬経路に対応する。無線伝送媒体の構成の大部分では、補正された伝搬時間は、2つの装置(1、2)を隔てる距離の直線上の測定値である。 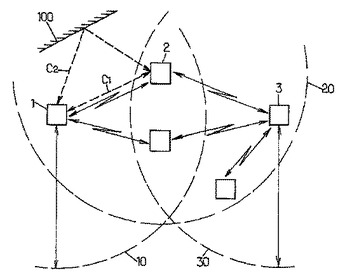 (もっと読む)
(もっと読む)
プログラム可能な透過アレイを使用するマイクロ波撮像システム及び方法
【課題】可動部品を必要としない、人間および他の物品のセキュリティ検査に使用可能なマイクロ波撮像システムを提供する。
【解決手段】
マイクロ波撮像システム(10)は、マイクロ波源(60a)により提供されるマイクロ波放射を使用して、ターゲット(420)を撮像する。該システムは、マイクロ波源からターゲットの位置にマイクロ波放射を向かわせるよう、対応する透過係数でプログラム可能であるアンテナ要素(200)のアレイを含む。アンテナ要素は、さらに、ターゲットの位置から反射した反射マイクロ波放射を受信し、該反射マイクロ波放射をマイクロ波レシーバ(60b)に向かわせるよう、対応する追加の透過係数でプログラム可能である。プロセッサは、反射マイクロ波放射の強度を測定するよう動作可能であり、ターゲットの画像内のピクセル値を求める。複数のビームをターゲットに向けて、画像を構成する際のピクセル値を取得することができる。
(もっと読む)
アレイアンテナ装置
【課題】振幅分布が一様である複合ユニットを用いた場合であってもサイドローブを低減させることができるアレイアンテナ装置を提供する。
【解決手段】一列に配置された複数のアンテナ素子を制御する給電回路33、34における振幅分布が一様な複合ユニット3を複数配列することによりアンテナ開口面が形成されたアレイアンテナ装置であって、アンテナ開口面は、一方向に配列された複数の複合ユニット3と該一方向と交差する交差方向に配列された複数の複合ユニット3とによって擬似円状に形成されている。
(もっと読む)
干渉型レーダー
【課題】一般のレーダーと異なり、送信信号はパルスではなく、CWまたはFMCW信号であるため、レーダー用ではない一般通信用の送信モジュールを使用することができる。
【解決手段】目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する受信部Rとを有している。前記送信部Tは、目標対象物の方位及び速度を検出するためのCW信号を送信アンテナ7から出力する。前記受信部Rは、前記送信部Tからの送信と同時に、目標対象物で反射した反射波を複数台の受信アンテナ8で受信し、受信信号に対してスペクトル解析を行い速度成分ごとの受信信号に分類する機能と、受信アンテナ系統の信号間の相関する機能と、前記相関処理された信号を積分する機能と、受信アンテナ間の信号の位相差からアンテナ面に入射する信号の位相面を求めて、その出力を2次元FFTしてターゲットの方位方向及び速度を計測する機能とを実行する。
(もっと読む)
位置測定システムおよび位置測定方法
【課題】 人の足の位置を正確に測定することができるシステムであって、さらに体の向きを推測することにより、装置の消費電力を低く抑えることができる位置測定システムおよび位置測定方法を提供する。
【解決手段】 舞台面上1で、人111が右足にID発信靴右21を、左足にID発信靴左22を装着する。舞台面下2には電波送受信装置31および制御表示装置51が設置され、電波送受信装置31が舞台面上1に向けて電波を発信する。ID発信靴右21およびID発信靴左22が電波を受信し、それぞれのID情報を電波送受信装置31に送信する。電波送受信装置31はID情報と電波送受信装置の位置情報を制御表示装置51に送信する。制御表示装置5は舞台面が表示された画面上に人111の位置と向きを表示する。これを時系列的に繰り返すことにより、舞台上の人の位置と動きを画面上で確認することができる。
(もっと読む)
レーダ装置
【課題】 走査時間の長時間化を招くことなく、観測領域を広げることができるとともに、グレーティングローブの発生を招くことなく、受信アンテナの素子数を削減することができるようにする。
【解決手段】 不等間隔に配置されている複数の素子アンテナから構成されている受信アンテナ3を用いて、目標に反射されたパルス信号を繰り返し受信する受信器の他、送信パターンの主ビーム内に受信ビームを形成し、かつ、所定の方向にナルを形成するための荷重を計算する対称方向抑圧用フィルタ生成部9を設け、その受信器により繰り返し受信されたパルス信号と対称方向抑圧用フィルタ生成部9により計算された荷重とを用いて受信ビームを形成する。
(もっと読む)
レーダ装置
【課題】 多面の空中線から電波を送信し、なおかつセクタースキャンするレーダ装置において、優先的して追尾する目標に対し、追尾データレートの向上を図り、追尾精度を向上させる。
【解決手段】 各受け持ち角度範囲内を指向性ビーム(アンテナビーム#1〜#4)で往復スキャンしながら空間への電波の放射および空間からの反射電波の受信を行う4個のアンテナを90°間隔で4方向に配置して全方位からの観測データを得る構成において、各アンテナビームによる監視範囲を90゜+Δθとすることにより、斜線部で示すΔθのオーバーラップ方位角幅を設け、このオーバーラップする方位角領域Δθの中心方位を、オペレータが指定した方位又は追尾の予測位置の方位となるように空中線装置を機械的に駆動させ、その状態を基準としてセクタースキャンを行う。
(もっと読む)
デバイス間距離測定
異なるクロックレートを有しうるクロックを有する第1及び第2デバイス。デバイス間を伝播する信号の伝播距離の指標を得ることは、第1デバイスから第2デバイスにダイ1信号12を送信することを伴う。ターンアラウンドタイムTAT後、第2信号14は、第2デバイスから第1デバイスに送信される。クロック内のあらゆるエラーは、ターンアラウンドタイムTATの測定値のエラーをもたらしうる。デバイスは、LO周波数整合が存在するまで周波数分割比を調整することにより、若しくは、混合された信号の包絡線のオフセット周波数を求めることにより、第1及び第2デバイスのクロックレートの比を算出する回路を含む。クロックレートの比は、ターンアラウンドタイムTATを補償してエラーを緩和するために用いられる。正確な距離の測定値は、リレーアタックが車両セキュリティシステムで発生したか否かを判断するために用いることができる。 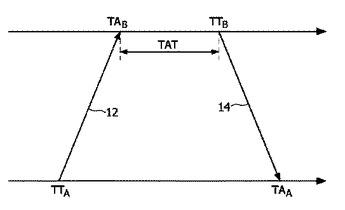 (もっと読む)
(もっと読む)
多目的レーダ監視システム
本発明は森林火災のようなRCSが低い対象物(110,140,150,160,190)を検出するレーダシステム(100)を開示する。このシステムは、機構的に固定された複数のアンテナ(220)を備え、レーダエネルギーを送信する複数の送信局(120)と、機構的に固定された複数のアンテナ(220)を備え、前記複数の送信局から送信されたレーダエネルギーの反射波を受信する複数の受信局(130)とを有する。前記送信局と前記受信局との複数アンテナ(220)は地面に対して実質的には平行なメインビーム(221)をもち、前記複数の受信局の少なくともサブセットには、第1と第2の受信信号を記録する手段と、前記信号の内の一方を前記信号の他方から減算する手段とを備える。前記送信局と前記受信局とは10〜100MHzの周波数範囲で機能するように構成されている。 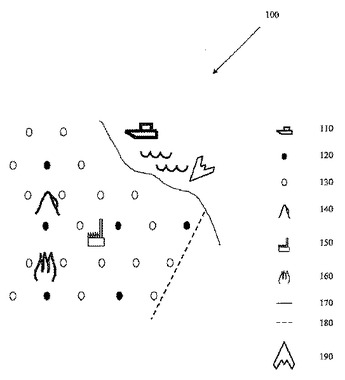 (もっと読む)
(もっと読む)
物体監視センサ
小型、低電力かつ広範囲の物体を高精度かつ高速に検出できる物体監視センサであって、ステレオ効果を位相差として感知する複数のモノパルス方式を採用するパッチアンテナ(1)と高周波回路を有し、放射電磁波の反射波から相対速度と相対距離を検出するドップラーレーダと、光の侵入角度を定義するプリズムレンズ(4)と1次元のアレイ上に受光体(3)が配置した光イメージセンサとを組合わせて構成される。  (もっと読む)
(もっと読む)
レーダシステム、物体検出方法、レーダ装置、電波反射体
【課題】 レーダ装置と電波反射体とを併用する物体検出において、設置環境等に影響されることなく、高精度の物体検出を実現する。
【解決手段】 レーダ送受信機10は、水平偏波の偏波送信波21を検出反射体30に向けて送信する水平偏波送信アンテナ11aと、垂直偏波のみを選択的に受信する垂直偏波受信アンテナ11cを備えている。検出反射体30は、入射した偏波送信波21の偏波面を90°変化させて垂直偏波の偏波受信波22として送受信アンテナ11に向けて反射する機能を備えている。検出反射体30の近傍にノイズ物体が存在しても、このノイズ物体からは水平偏波の偏波送信波21がそのまま反射されるため、レーダ送受信機10では、検出反射体30から返される垂直偏波の偏波受信波22を選択的に検出でき、この偏波受信波22が障害物等にて遮断されたときの受信電力の変化を高精度に検知できる。
(もっと読む)
レーダー装置
【要 約】
【課 題】本発明は、簡易な構成で対象物までの距離及び方向を検出することを目的とする。
【解決手段】送信波を送信し対象物で反射された受信波を受信する第1及び第2の送受信回路を有し、前記第1の送受信回路は第1の送受信回路の送信した送信波が対象物で反射された受信波を受信すると共に前記第2の送受信回路が送信した送信波が対象物で反射された受信波を受信し、第2の送受信回路は当該第2の送受信回路の送信した送信波が対象物で反射された受信波を受信することを特徴とする。前記第1及び第2の送受信回路を用いて前記第1及び第2の送受信回路から対象物までの距離を算出し、算出した対象物までの距離に余弦定理を適用することで、送受信回路及び対象物を結ぶ直線と、2つの送受信回路を相互に結ぶ直線との成す角度を算出する。
(もっと読む)
自動車の外部環境を監視するためのシステム及び方法
この発明のシステムは監視エリア内に含まれる物体を表している外部からの存在情報を捕捉するための補足デバイス(1)を有している。上記情報捕捉デバイス(1)は、電子システム(4)と協働する車両の軌道検出用手段(2)及び車両の傾斜検出用手段(3)といっしょになって動作する。この発明の方法は、提案されているシステムを使用しており、軌道及び/又は傾斜を捕捉デバイス(1)によってカバーされる対応する監視エリアと関係付けるチャートを形成し、使用する捕捉デバイス(1)のタイプに依存する適切な行動を電子システム(4)によって選択し実行することによって、車両の軌道及び/又は傾斜に応じて前記監視エリアを変更する段階を有している。  (もっと読む)
(もっと読む)
角度分解能を備えたアンテナシステム
本発明による角度分解能を備えたアンテナシステムでは、別個の送受信アンテナを備えた2つのレーザーセンサ(8,9)のみが設けられている。この2つのレーザーセンサ(8,9)の受信アンテナ(1,21,22)は、そのメイン放射方向に関してもその放射開口幅に関しても切換えが可能である。  (もっと読む)
(もっと読む)
車両用のレーダーセンサ
周波数変調されたレーダー信号を送受信する少なくとも1つの送受信器(14、16)と、位置測定された対象物との間隔(di)および相対速度(vi)を計算する評価器(24、48)とを備える、車両用のレーダーセンサにおいて、相対速度(vi’)を独立して測定する統合されたドップラーレーダーシステム(26、42、44)を特徴とする。 (もっと読む)
移動体の周囲物体検出装置及び移動体の周囲物体検出方法
【課題】検出精度を向上させることのできる移動体の周囲物体検出装置及び方法を提供する。
【解決手段】複数の検出手段X(i),X(i+1)・・を有し、各検出手段は、自車両の周囲に存在する物体を検出するセンサ部13と、センサ部13で検出された物体と自車両との間の相対位置データを求める位置算出手段14と、センサ部13の検出データに基づいて、自車両と物体との間の相対位置データの確信度データを求める確信度演算手段15とを有する。そして、各検出手段で求められた確信度データに基づいて、この検出手段で求められた相対位置データを重み付け処理し、重み付け処理された各相対位置データに基づいて、自車両と物体との相対位置を求める統合座標算出手段11を備えたことを特徴とする。
(もっと読む)
401 - 420 / 454
[ Back to top ]