
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
381 - 400 / 454
ミリ波レーダ装置

【課題】少ない素子数のアレーアンテナを用いた場合でも等価開口を大きくすることができ、狭ビーム化に対応可能なレーダ装置を得る。
【解決手段】アレーアンテナの配列の相対する端部に位置する2つの素子アンテナを送信素子アンテナとすると共に、残りの複数の素子アンテナを受信素子アンテナとし、2つの送信素子アンテナを切換え、送信素子アンテナからレーダ送信波を順次に送信して、それぞれの反射電波を対応させた順序の受信素子アンテナで受信し、受信した受信信号を合成して合成開口アレー信号として処理する。
(もっと読む)
埋設された長尺物体の探査装置および探査方法

【課題】被探査領域に埋設された合成樹脂管等の長尺物体を探査するための探査装置および探査方法を提案する。
【解決手段】本発明に係る探査装置(1)は,演算手段(7)および表示手段(8)を有する評価ユニット(6)を具え,さらに,被探査面(F)に沿って移動可能であり,かつ,探査経路センサ(10)と,アンテナ(12a)が設けられた送受信ユニット(11a)とを有する手持ち式の探査ヘッド(9)を具える。前記アンテナは,被探査面(F)内で相互に離間して配置された少なくとも2個のアンテナ(12a,12b)を含み,これらアンテナ(12a,12b)の被探査面(F)内における間隔が5cm〜50cmの範囲内に設定されている。
(もっと読む)
ネットワークレーダ装置
【課題】 目標検出性能を向上するネットワークレーダ装置を得る。
【解決手段】 レーダアンテナ1a,2aの各々の位置を検出する位置検出部1b,2bと、レーダアンテナ1a,2aの各々のビーム指向方向を制御するビーム制御部1c,2cと、レーダアンテナ1a,2aの各々の位置とビーム指向方向とに基づいてレーダアンテナ1a,2aからの受信信号の到来時刻差を求め、レーダアンテナ1a,2aからの受信信号の到来時刻をその到来時刻差に応じて補正する目標距離補正部11,12と、補正されたレーダアンテナ1a,2aからの受信信号の相関処理を行い、それら受信信号の振幅値に応じて目標の有無を検出するバイナリ積分型目標検出部21とを備えた。バイナリ積分型目標検出部21において、レーダアンテナ1a,2aからの受信信号の相関処理での相関ゲートサイズを小さくすることができ、目標検出性能を向上することができる。
(もっと読む)
レーダ装置および類似装置
【課題】
複数のレーダアンテナから得られる探知データを正確に合成して表示するレーダ装置を提供する。
【解決手段】
レーダアンテナ11から得られた探知データは相関処理部91Aで相関処理される。レーダアンテナ21から得られた探知データは相関処理部91Bで相関処理される。レーダアンテナ21からの相関処理データと同じアドレスを指定するマスク画像は、マスク領域発生部32により設定されてマスク用画像メモリ62に書き込まれる。これら相関処理部91A,91Bの各相関処理データはレーダアンテナ11,21の設置位置に応じたアドレス設定がされており、相関処理部91Bの処理用画像メモリ902B、マスク用画像メモリ62は共通のアドレスが設定されている。表示用画像メモリ61は、マスクデータに従って入力された相関処理データを表示画面に設定されたアドレスに従って記憶するとともに表示器10に出力する。
(もっと読む)
埋設深さ測定装置
【課題】 演算の2度手間を避けられるようにする。
【解決手段】 深さ測定装置10は、第1送受信ユニット26と第2送受信ユニット30とを備えている。これらの送受信ユニットは、中心が一致していて、それぞれ送信アンテナ28A、32Aと受信アンテナ28B、32Bとからなる。第2送信アンテナ32Aと第2受信アンテナ32Bとの間隔は、第1送信部アンテナ28Aと第1受信アンテナ28Bとの間隔と異なっている。第1送受信ユニット26と第2送受信ユニット30とは、ユニット支持部34によって一体に移動する。第1送受信ユニット26と第2送受信ユニット30とは、切替え部42によって切り替えて送受信を行なう。演算制御部20の信号処理部50は、各受信部の出力信号に基づいて反射波を求め、演算部52に出力する。演算部52は、信号処理部50が求めた反射波の信号に基づいて、鉄筋18のかぶり深さおよびコンクリート構造物12の電波の伝播速度を求め、表示部22に表示する。
(もっと読む)
情報処理装置、管理システム、情報処理装置の制御方法、情報処理装置の制御プログラム、および情報処理装置の制御プログラムを記録した記録媒体
【課題】 所定位置を通過するRFIDタグの順番を精度よく特定することができる情報処理装置を実現することにある。
【解決手段】 本発明の管理装置10は、ゲートを通過する各RFIDタグ1の位置をそれぞれ算出するリーダライタ2から情報を受付け処理するものであり、リーダライタ2から、算出されたRFIDタグ1の距離情報をそれぞれ受付ける外部通信部11と、この外部通信部11によって受付けた距離情報それぞれを比較し、RFIDタグ1のゲートにおける通過順を特定する順序決定部15とを備えている。このため、ゲートにおけるRFIDタグ1の通過順を精度よく特定することができる。
(もっと読む)
レーダ装置及び測角方法
【課題】ディジタルビームフォーミングを行うレーダ装置において、測角精度に優れたレーダ装置を提供する。
【解決手段】マルチビーム形成器(2)7は、メモリ3に保持されている受信信号から同時並列に角度方向に並べた複数の測角用受信ビームパターンB1〜BNを形成し、各ビームに対応した角度毎に受信信号を出力する。平均値減算器は、角度毎に着目する角度の前後の予め定めたサンプル数の角度の振幅値の平均値を算出し、着目する角度の振幅値から減算する。最小値検出器は、平均値減算後の各角度の振幅値の中の最小の振幅値を検出する。TH比較器(2)は、検出された振幅値と予め定めたスレッシュホールドTH2とを比較して、TH2よりも小さい場合に目標信号と判定し、そのビームの角度を測角値として出力する。
(もっと読む)
アレイアンテナを用いたレーダシステム
【課題】より大きな開口面のアンテナを等価的に形成する手段を提供する。
【解決手段】複数のアレイアンテナ(10-1〜10-M)のそれぞれに設置位置と方向の情報を生成する位置情報発生器(11-1〜11-M)を各アレイアンテナ(10-1〜10-M)に付加し、アレイアンテナ(10-1〜10-M)の位置情報とレーダ制御器(9)が指示する放射ビーム指向方向のデータからアレイアンテナの最適な放射開口面を選定する最適アンテナ開口面選定器(13)と、選定された複数のアレイアンテナ開口面の素子配列形状からレーダ制御部が指示する放射ビーム指向方向に放射ビームを形成するためのアンテナ開口面励振分布を選定した開口を合成して求めるための各アンテナ励振条件算出器(14)を各アレイアンテナ共通の装置として付加する。
(もっと読む)
車両の距離測定システムの距離測定データを評価するための方法および装置
本発明は、車両の距離測定装置の距離測定データを評価する方法に関する。車両の、観察される周囲環境のカメラ画像(100)を得て、距離測定装置によって、観察される同じ周囲環境から、距離測定データを得る。カメラ画像(100)を表示装置に表示し、距離測定データに従って、距離情報(1a´,1b´,2´)をカメラ画像(100)に統合する。本発明によれば、車両の経路(4a,4b)を確定し、場合に応じて、カメラ画像(100)に統合する。 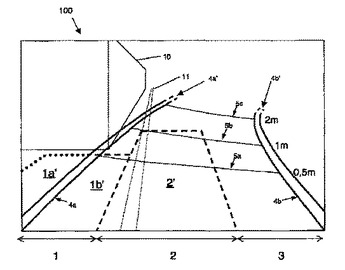 (もっと読む)
(もっと読む)
複数個の走査位置における物理特性を感知するシステム
走査位置(P1〜P5,P11〜P44,Pijk)に割り当てられた物理特性を感知するシステムは、感知領域(AR1〜AR5,BR1〜BR2,C1〜C3,D1〜D3,E1〜E3,F1〜F4,G1〜G3,H1〜H4)内の物理特性を感知し得るセンサ(A1〜A5,B)を備え、これら感知領域(AR1〜AR5,BR1〜BR2,C1〜C3,D1〜D3,E1〜E3,F1〜F4,G1〜G3,H1〜H4)は、それぞれが少なくとも1つの走査位置(P1〜P5,P11〜P44,Pijk)を掃引するように配列され、これらの感知領域(AR1〜AR5,BR1〜BR2,C1〜C3,D1〜D3,E1〜E3,F1〜F4,G1〜G3,H1〜H4)は、少なくとも1つの走査位置(P1〜P5,P11〜P44,Pijk)で相互に重なり合い、各走査位置は、感知領域(AR1〜AR5,BR1〜BR2,C1〜C3,D1〜D3,E1〜E3,F1〜F4,G1〜G3,H1〜H4)の一意なパターンで掃引され、ただし、次の条件が満たされるようにする。すなわち、log2(n)≦i<x・n1/x。ここで、iは感知領域の数、nは走査位置の数、xは走査位置の配列が広がる空間的な次元数である。 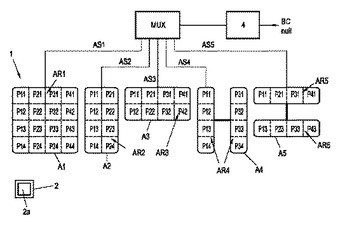 (もっと読む)
(もっと読む)
レーダ信号処理装置
【課題】物標からの反射波の距離減衰などに応じて相関行列を適切に推定することの出来るレーダ信号処理装置の提供
【解決手段】物標からの反射波を受信信号S2として受信して、所定の観測信号S3をそれぞれ出力する複数の観測手段OB、各観測信号から、受信アンテナからの距離r1,…,rnに対応した距離成分XRp(r1),…,XRp(rN)を抽出する距離成分抽出手段DS、抽出された各距離成分を集め、それら各距離成分に対応した相関行列推定値Rxxqを、指数平滑型相関行列推定法を用いて各距離成分に対応した忘却係数αをパラメータとする形でそれぞれ演算推定する相関行列推定手段RM、推定された相関行列推定値に基づいて物標の有無又は運動状態を推定する手段OM及び、受信アンテナ5からの距離に対応した忘却係数をそれぞれ演算決定し、相関行列推定手段に、各距離成分に対応した忘却係数として出力する忘却係数決定手段FFを有して構成される。
(もっと読む)
複数のレーダをコヒーレントに組み合わせるシステム及び方法
レーダをコヒーレントに結合するシステム及び技法は、各レーダで受信されるコンポジット物標エコーがモノスタティックエコー及びバイスタティックエコーからの寄与分を有することになるように、複数のレーダのうちの1基から送信されたパルスの時間遅延及び位相を調整する位相及びレンジの較正値及び初期化値を生成することを含む。この方法は、引き続き各レーダでコンポジット物標エコーが受信されるように、複数のレーダのうちの1基により後続して送信されるレーダパルスの時間遅延及び位相をさらに調整する位相及びレンジの補正値を予測することをさらに含む。この方法は、コンポジット物標エコーをコヒーレントに加算することをさらに含む。 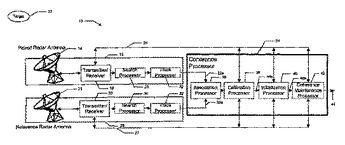 (もっと読む)
(もっと読む)
ミリ波イメージング装置
【課題】画像を処理することにより、信号可干渉性に起因する歪みを除去した画像を得る
ことができるミリ波イメージング装置を提供する。
【解決手段】図1のミリ波イメージング装置は、受信されたミリ波により像を撮像するミリ波帯撮像器C1およびミリ波帯撮像器C2と、ミリ波帯撮像器C1に接続されるアンテナANT1、ミリ波帯撮像器C2に接続され、アンテナANT1からのミリ波の照射方向と同一の照射方向にミリ波を照射し反射したミリ波を受信するアンテナANT2、を有するアンテナ送受信系とを備え、アンテナANT1とアンテナANT2の一方が他方に対し照射方向にオフセットされていることで、ミリ波帯撮像器C1の画像とミリ波帯撮像器C2の画像を処理することにより、信号可干渉性に起因する歪みを除去した画像を得ることができる。
(もっと読む)
ミリ波イメージング装置
【課題】画像を処理することにより、信号可干渉性に起因する歪みを除去した画像が得られるミリ波イメージング装置を提供する。
【解決手段】図1のミリ波イメージング装置は、受信されたミリ波により像を撮像する第1ミリ波帯撮像手段(SA1、D1)および第2ミリ波帯撮像手段(SA2、D2)と、
アンテナANT1、アンテナANT2、アンテナANT1が主軸上に配置される結像レンズ系LN1、アンテナANT2が主軸上に配置され、当該主軸が結像レンズ系LN1の主軸に平行な結像レンズ系LN2、を有するアンテナ送受信系とを備え、結像レンズ系LN1およびアンテナANT1からなる準光学系と、結像レンズ系LN2およびアンテナANT2とからなる準光学系の一方が他方に対し主軸方向にオフセットされていることで、ミリ波帯検波器D1の画像とミリ波帯検波器D2の画像を処理することにより、信号可干渉性に起因する歪みを除去した画像が得られる。
(もっと読む)
無線タグ通信装置及び無線タグ管理システム
【課題】 消費電力を抑えて効率的な無線タグ管理を行う無線タグ通信装置及び無線タグ管理システムを提供する。
【解決手段】 無線タグ14との間の通信指向性を順次切り換えるように制御する指向性制御部34と、その指向性制御部34により切り換えられるそれぞれの通信指向性における前記無線タグ14からの返信信号を比較し、その比較結果に基づいてその無線タグ14の移動を判定する無線タグ移動判定部64とを、含むことから、前記無線タグ14との間で必要十分な通信を行うことでその無線タグ14の移動を判定することができる。すなわち、消費電力を抑えて効率的な無線タグ管理を行う無線タグ通信装置12を提供することができる。
(もっと読む)
自動吐水制御装置
【課題】 如何なる方向から移動してくる物体であっても、その有無を正確に検知して吐水のオン/オフ制御が行え、物体の誤検知による誤作動を防止できるようにする。
【解決手段】 コントローラ部は、マイクロ波センサ5から出力されるドップラ信号に基づいて、手が所定空間領域に進入したか否か判断し、手が存在すると判断したら、電磁バルブ開の制御信号を出力することにより吐水口3cを通じて水を吐水させる。電波ビームの放射方向が放射方向11にスキャニングされている状態で、センサ5から対象物検知信号が出力されると、その対象物を洗浄のため吐水口3cの略直下の空間領域に向かって進入しようとする手であると判別し、吐水口3cが現在吐水中であれば吐水を継続すべく、未だ吐水を行っていなければ吐水を開始すべく、電磁バルブに制御信号を出力する。
(もっと読む)
ガードビームを有する車輌レーダーシステム
第一のアンテナ(22)及びガードアンテナ(24)を備えた車輌(16)中の予測衝突レーダーシステム(10)であって、放射パターン(44、46)がオーバーラップしており、ガードアンテナ(24)の放射パターン(44)は第一のアンテナ(22)の放射パターンよりも広い。第一のアンテナ及びガードアンテナからの信号の比較(718,120)が車輌(16)の脅威となりそうでない標的の除外を提供する。第一のアンテナ(22)の第一の実施例はマルチビームアンテナ(22.1、22.2)であって、電磁レンズ(40、56)が例えば誘電体(40、40.1)または平面(56)であって、前方放射エレメント(58)からの信号が、それらと整列したガードアンテナ(24)からの信号と比較される。他の実施例では、電磁レンズ(70)は、ガードアンテナ(24)と協働して放射パターン(44.1’)の方向を変化させる。  (もっと読む)
(もっと読む)
車両用障害物検知装置
【課題】車両の運転者の運転により役立てることができる車両用障害物検知装置を提供する。
【解決手段】車両の4隅近傍に配置された超音波センサ4FL,4FR,4RL,4RRと信号送受信部11と位置検知部12とで障害物位置検出手段を構成している。接触判断手段たる接触予測部15は、位置検知部12による現時点の障害物の検出位置と進行軌跡予測部14により予測された車両1の進行軌跡とに基づいて車両1と障害物との接触可能性を判断し、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が有ると判断したときと、上記障害物位置検出手段により相対位置が検出された障害物Bとの接触可能性が無いと判断したときとで表示器6の表示およびブザー5による警報音の周波数をそれぞれ変化させる。
(もっと読む)
構造物内部の異常箇所候補抽出方法およびプログラム
【課題】 構造物内部のレーダ計測データにより、コンピュータによる透過映像を得るまでの計算時間の削減と、オペレータによる透過映像を診断する労力の軽減、そして計測から診断結果出力までの時間短縮を目的とする。
【解決手段】 地中レーダを用いて構造物内部検査を行い、前記地中レーダの反射信号から内部構造の画像再生を行うに際し、反射強度分布から閾値により正常箇所を除去することにより異常箇所候補領域を抽出し、当該異常箇所候補領域とそこに含まれる反射強度より、異常の度合いを示す評価値を得て、異常箇所候補領域の位置を評価値で順位付けして、像再生処理に必要な計測データの切り出し場所を特定し、特定領域についての像再生処理を行う。
(もっと読む)
車載用レーダ
【課題】広い角度範囲での対象物検知に対して高速の信号処理が可能な車載用レーダを提供すること。
【解決手段】車載用レーダは、電磁波を放射する送信アンテナ1と、対象物によって反射された上記電磁波を受信する2個の受信アンテナ2a,2bと、送信アンテナと2個の受信アンテナとが面上に配置されたアンテナ板3とを備える。更に、2個の受信アンテナが並ぶ方向を方位方向としたときに、方位方向にアンテナ板を回転することによって2個の受信アンテナにより形成される検知角を走査する駆動部4を備える。駆動部は、走査と走査の間に回転を停止する静止時間を設ける。車載用レーダは、更に、2個の受信アンテナから出力される受信信号と静止中のアンテナ板の回転角とから、静止時間において対象物の基準方向に対する方位角を検出する信号処理部13を備える。
(もっと読む)
381 - 400 / 454
[ Back to top ]