
Fターム[5J070AD05]の内容
レーダ方式及びその細部 (42,132) | アンテナ及び偏波 (3,612) | 送受アンテナのいずれかが複数 (1,035) | 送信・受信アンテナが何れも複数 (454)
Fターム[5J070AD05]に分類される特許
361 - 380 / 454
インプラント、体内のインプラントの位置を求める装置および方法
【課題】体内におけるインプラントの位置の特に簡単かつ正確な検出を可能にする。
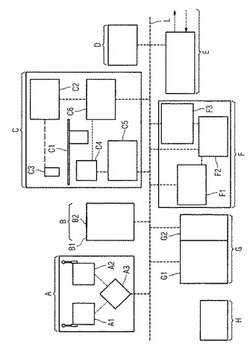
【解決手段】第1の座標系に割り付けられた画像データセットであって、少なくともインプラントを含んでいる体部分の第1の画像を作成するための画像データセットを取得する撮影装置(C)と、トランスポンダへ電磁的な一次放射を送出する送信器(A1)と、一次放射によりトランスポンダから放出された二次放射を受信する受信器(A1,A2)と、二次放射に基づいて第2の座標系におけるトランスポンダの位置を求める位置検出装置(A)と、第1の座標系と第2の座標系とを相関させる相関手段(F1)と、第1の画像およびトランスポンダの位置を再現する第2の画像を作成する画像作成手段(F3)とが設けられている。
(もっと読む)
無線タグ探索方法および装置

【課題】
無線タグの位置の探索を支援する。
【解決手段】
無線タグの位置を探索する際に、無線装置は無線タグに対してID番号の送信を要求する。無線タグが送信した電磁波を受信した無線装置は、電磁波の受信強度と、無線装置のアンテナの受信特性と、物体に取り付けられた状態における無線タグの送信特性と、空間を伝搬する電磁波強度と伝搬距離との関係を表す計算式に基づいて、無線装置から無線タグまでの距離や方向を推定し、その推定位置を無線タグのID番号と関連付けて表示する。複数回の探索により無線タグの位置を特定するため、無線装置の向きを指示し、各探索で推定された推定位置の重なりを表示する。
(もっと読む)
車両周辺物体検知装置およびシステム
【課題】 静止物を正確に検知することができる「車両周辺物体検知装置およびシステム」を提供すること。
【解決手段】 車両周辺物体検知装置には、車両周辺の物体を検出するレーダ処理モジュール10、位置算出部12と、車両の走行状態を含む車両情報を取得する車両情報取得部14と、検出された物体の検出履歴情報を車両情報とともに格納する検出履歴DB20と、新たに物体が検出されたときに、そのときの車両情報を検索キーとして、この検出された物体と一致する物体が存在するか否かを検出履歴情報に基づいて検索し、一致する物体の存在が確認されたときにこの物体を静止物として判定する静止物判定部30とが備わっている。
(もっと読む)
秘匿UWB測距のためのデバイス、方法及びプロトコル
互いに無線通信する少なくとも2つのデバイス間の安全な測距のための装置、システム、方法及びコンピュータプログラム製品。詳細には、超広帯域(UWB)プロトコルによって通信する少なくとも2つのデバイス間の安全な測距のための装置、システム、方法及びコンピュータプログラム製品。測距及びセキュリティのために、3値IR系列又は時間ホップIR系列のいずれかを用いる。第1のデバイスが測距パケットを送信する。第2のデバイスが、第1のデバイス及び第2のデバイスだけが知っている遅延時間後に、その測距パケットに応答する。遅延時間は、第1のデバイス又は第2のデバイスのいずれかによりランダムに選択することができ、暗号化された通知パケットによって、他方のデバイスに知らせることができる。 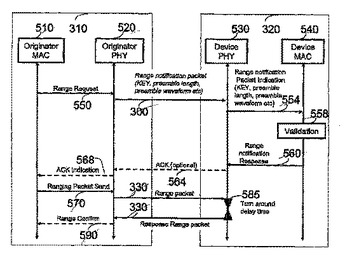 (もっと読む)
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
マイクロ波イメージングのためのシステム及び方法
【課題】サイドローブを抑圧してマイクロ波画像を取得することができるマイクロ波イメージングシステムを提供する。
【解決手段】 相補的なサブアレイパターンを形成し、疎な幾何学的配列に配列されたサブアレイと、送信機及び受信機と、第1のモードで、送信機から相補的なサブアレイパターンの両方にマイクロ波照射を送信し、反射マイクロ波照射を受信機に与え、第2のモードで、送信機から相補的なサブアレイパターンのうちの第1のパターンに送信し、第2のパターンからの反射マイクロ波照射を受信機に与える照射ネットワークと、を備え、目標物にマイクロ波を照射して、目標物のマイクロ波画像を取得するマイクロ波イメージングシステム。
(もっと読む)
車両案内用タグおよびその設置方法
【課題】 特定の方向に進む車両にのみ特定の情報を提供する。
【解決手段】 車両40との間で直線偏波の電波信号を送受信する第1のタグ30aおよび第2のタグ30bを塗料21で道路10に固定する。この際、第1のタグ30aに備えられたアンテナで扱う直線偏波の向きと、第2のタグ30bに備えられたアンテナで扱う直線偏波の向きと、が直交するように第1のタグ30aおよび第2のタグ30bを道路10に配置する。
(もっと読む)
位置検出用タグ、位置検出装置、位置検出方法、位置検出システム
【課題】無線ICタグを用いて、位置と方位を安価に精度良く測定することが可能な位置検出システムを提供すること。
【解決手段】位置検出用タグ11を、それぞれの偏波方向が異なる複数の無線ICタグ21〜24により構成した。これら無線ICタグ21〜24のうち、位置検出装置12が送信する信号の直線偏波に対応する無線ICタグが応答してタグ番号を送信する。この応答した無線ICタグのタグ番号により、位置検出装置12の質問器32は、変換テーブル33に記憶されたデータを検索し、応答した無線ICタグに対応する位置情報(位置及び方向)を読み出し、利用者の位置及び方向を特定する。位置検出装置12から送信する直線偏波の信号は、円偏波の信号に比べて到達距離が長いため、位置検出装置12のアンテナ31と位置検出用タグ11とを離すことができる。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
少なくとも一つの複数周波数センサを用いた連続媒体および/または局在ターゲットの特性を測定するシステムおよび方法
空間の所定の体積中の連続媒体または少なくともひとつの局在ターゲットの少なくとも一つの特性を示すデータを得るための方法およびシステムを提供する。このシステムは連続媒体またはターゲットからの複数の信号を捕らえる少なくとも一つのセンサを有するセンサ構成を含む。複数の信号それぞれは、異なる周波数にそれぞれ中心がある。このシステムはまた、センサ構成により捕捉された複数の信号を用いてべき乗重み付き増分を計算すること、および複数のモデルを用いて複数のべき乗重み付き増分を連続媒体またはターゲットの特性に関連付けることによって、連続媒体またはターゲットの特性を示すデータを得るための処理回路を含む。連続媒体またはターゲットの選択された特性は、従来の相関関数、スペクトルおよび構造関数を基にした方法およびシステムで可能であったよりも、より優れた正確さおよび時間的および/または空間的分解能をもって推定することができる。従来の方法およびシステムに比べて、この発明は、たとえばグランドおよびシークラッタなどの大きい時間的スケールにおける信号の汚染に対して敏感ではなく、低周波数の外乱に対して敏感ではない。この発明は、たとえば、サイズ、形状、視認性、速度、動きの方向、および前述の特性の変化率の割合などの、媒体やターゲットの様々な特性を推定することが可能である。 (もっと読む)
静止衛星受信機の位置を決定するための方法および装置
本発明は、静止衛星アンテナを備えた静止衛星受信機の位置を衛星ペイロード信号内のレンジングパケットによって決定するための測位方法および測位装置に言及する。前記衛星ペイロード信号は、確定地球局位置にある1つまたは複数の地球局から送信され、異なる対地静止軌道位置にある1つまたは複数の衛星から、同じ静止衛星アンテナで受信されるように中継され、対応する衛星ペイロード信号内の各レンジングパケットは、そのレンジングパケットが、対応する地球局から送信された時刻についてのタイムスタンプ情報に関するものであり、その静止衛星受信機によって、受信された衛星ペイロード信号内で複数のレンジングパケットが検出され、対応するレンジングパケットの検出時刻相互間の相対的時間差が測定され、測定された相対的時間差が収集されて、測定された相対的時間差の冗長性を解決するための二次条件を用いて静止衛星受信機の位置を推定するために、確定地球局位置、タイムスタンプ情報および衛星位置情報に関連付けられる。 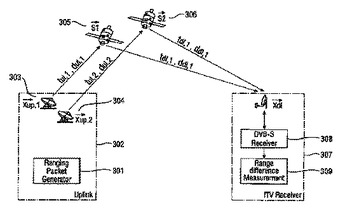 (もっと読む)
(もっと読む)
無線タグ通信装置
【課題】 無線タグとの間の通信指向性を通信目的に応じて適宜設定し得る無線タグ通信装置を提供する。
【解決手段】 複数のアンテナ素子34を有すると共に、無線タグ14との間の通信に用いられる少なくとも2つのアンテナ素子34相互間の間隔を変更し得るアレイアンテナ36と、そのアレイアンテナ36におけるアンテナ素子34相互間の間隔に応じてそれらアンテナ素子34に対応する信号それぞれの少なくとも位相を変化させるためのウェイトを設定することで無線タグ14との間の通信指向性を制御するPAAウェイト制御部48とを、備えていることから、無線タグ14との間の通信に関与するアンテナ素子34相互間の間隔を変更することで指向性特性を任意に制御できることに加え、その間隔に応じて所定のウェイトを設定することで通信指向性を好適に定めることができる。
(もっと読む)
車両と対象物体との距離を求める装置および少なくとも2つの送受信手段の間隔を求める方法
【課題】信号を送信し対象物体から反射したエコーを受信する送受信手段と、反射エコーの受信信号に基づき距離d1,d2,k,x,yを求める電子ユニットを用いて、車両と対象物体との距離を求める際、各送受信手段の間隔を少なくとも同じ精度を維持しながらいっそう簡単に捕捉できるようにする。
【解決手段】電子ユニットは、送受信手段の種々の感度で、および前記対象物体に対し一定の距離で、反射エコーの受信信号を捕捉し、種々の感度で受け取った受信信号に対し平均値を形成する。
(もっと読む)
物体検知センサ
【課題】センサの真下付近を含む所定の監視領域に対して物体の位置を精度良く計測することができる物体検知センサを提供すること。
【解決手段】監視領域をセンサ2からの距離に応じて複数の区画11,12,13に分割し、各区画を検知範囲とする複数のアンテナ3,4,5を切り替えて使用し、信号処理回路8において電波レーダの出力情報と電波照射経路とを照合することによって、設置したセンサの真下を含む領域において物体の監視面内での位置及び高さを計測する。
(もっと読む)
レーダーを用いたコンピュータ断層撮影法断層撮影方法
物体の特性の探査は、物体を通してステップ周波数レーダーを送信し、複数の受信構造によって、このレーダー信号の偏向された部分を検出することを含む。検出された部分は処理され、該偏向された部分の振幅及び位相と、偏向された部分を検出した受信構造の位置とに関連する情報を含む処理されたデータを生成する。この処理されたデータは分析されて、物体内における特定の位置の誘電特性に対応する情報が求められる。 (もっと読む)
モード切替式合成開口レーダ
【課題】 重量・消費電力・コストの増加を抑えつつ、スポットライトとポラリメトリの機能を持つ合成開口レーダを提供する。
【解決手段】 水平偏波と垂直偏波で送受信を行う複数の放射素子12,13と、放射素子との間に送受信信号の授受を行うとともに、前記信号の位相シフトを行う複数の送受信モジュール11と、放射素子からのパルス状送信信号を生成する送信部22と、送信部からのパルス状送信信号を分波して、複数の送受モジュールに分配する分波手段14と、複数の送受信モジュールからの受信信号を合波する合波手段14と、合波手段で合波された受信信号をデジタルデータに変換する受信部23,24と、各構成要素を駆動制御する制御部25とを有する。制御部25は、前記駆動制御機能に加えて、複数の送受モジュールを分割し、送受信モジュールを複数系統の受信系として駆動制御する機能を有する。
(もっと読む)
レーダ干渉抑制方法およびレーダシステム
【課題】 レーダ間の干渉を簡易に抑制できるレーダ干渉抑制方法、及びその方法を適用したレーダシステムを提供する。
【解決手段】 車両前方のターゲットを検出する前方レーダをR1、車両後方のターゲットを検出する後方レーダをR2とし、レーダRi(i=1,2)の動作周期Tiおよび動作時間Xi(<Ti)を、Kを正整数、T1>T2>X1+X2であるものとして、次の関係式を満たすように設定する。
K・T2+X2+X1≦T1≦(K+1)・T2−X2−X1
これにより、後続車両の前方レーダR1と、先行車両の後方レーダR2との間で干渉が発生したとしても、その干渉が2回以上連続して発生することはない。
(もっと読む)
自走式ロボット
【課題】 自走式ロボットの周囲の障害物を正確に検出する。
【解決手段】 進行方向V1に対して、超音波発信器s2を中心として、等間隔に、3台の超音波発信器と4台の超音波受信器とが交互に配設されている。ここでは、進行方向V1に向かって左側から、超音波受信器r1、超音波発信器s1、超音波受信器r2、超音波発信器s2、超音波受信器r3、超音波発信器s3、超音波受信器r4の順に配設されている。また、本体部10の中心点Oを通り、進行方向V1に平行な直線である中心線LSについて、3台の超音波発信器と4台の超音波受信器とが線対称な位置に配設されている。
(もっと読む)
個人を追跡し、位置特定し、保護を提供するためのデバイスおよび方法
個人を追跡し、位置特定し、および/または保護を提供するためのデバイスおよび方法が、本明細書に記載される。このようなデバイスおよび方法は、その個人の衣類に設けられるRFIDタグを組み込む。RFIDリーダおよびデータ処理用のデバイスもまた、このようなデバイスおよび方法で使用され得る。該方法は、個人を追跡または位置特定する方法であって、RFIDタグを埋め込まれた衣類を個人に提供するステップと、デバイスを用いて、該RFIDタグから信号を読み取るステップと、該信号を処理し、該個人を追跡または位置特定するステップとを包含する。  (もっと読む)
(もっと読む)
探知時間を短縮したフェーズドアレイレーダアンテナおよびその使用方法
フェーズドアレイレーダアンテナは、互いに干渉しない異なる周波数で同時に動作するよう構成された少なくとも2つのアンテナ(11、12、13、14)を含む。このフェーズドアレイレーダアンテナは、相対する側面で第1および第2のレーダ側面アンテナ(11、12)を支持する胴体と、第1のレーダ端部アンテナ(13)を支持する機首部と、第2のレーダ端部アンテナ(14)を支持する後尾部とを有する航空機に装着され得る。レードームはそれぞれ、第1および第2のレーダ端部アンテナを滑らかな空力形状を形成するように覆う。レーダ制御部(15)は、胴体内部に配設され、第1または第2のレーダ側面アンテナと、第1または第2のレーダ端部アンテナとを、それぞれ第1および第2の異なる周波数で同時に動作させるように、第1および第2のレーダ側面アンテナと、第1および第2のレーダ端部アンテナとに接続される。 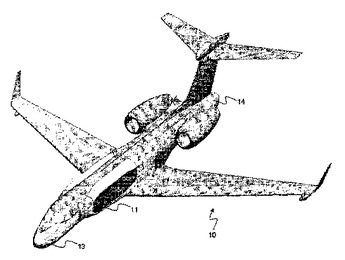 (もっと読む)
(もっと読む)
361 - 380 / 454
[ Back to top ]