
Fターム[5J070AF01]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 固定設置 (685)
Fターム[5J070AF01]に分類される特許
541 - 560 / 685
環境変化検知システム

【課題】温度などのタグの環境変化に伴ってタグの共振周波数が変化するシステムにおいて、所定の周波数でICタグと交信する一般的なICタグリーダを使用できる環境変化検知システムを提供する。
【解決手段】温度などの環境変化に伴い共振周波数がf1からf2に変化するように設定された共振回路を有する環境変化感知タグ10と、周波数frの電波を送受信でき、送信電力レベルを、高低切換可能とした読取装置20とを備える。いずれの周波数で共振するタグとも通信できる程度に高レベルの送信電力P_Highと、いずれか一方の周波数で共振するタグとしか通信できない程度に低レベルの送信電力P_Lowのそれぞれの送信電力レベルで同じ距離間隔で周波数frの電波を発信してタグ10と通信を試み、その応答の有無に基づいて、共振周波数がf1であるかf2であるかを判定し、そのタグが付された物品の環境変化の有無を検知する。
(もっと読む)
飛翔体誘導システム

【課題】 飛翔体誘導システムが、飛来する敵機をキャッチしてこれを迎撃すべくミサイル等の飛翔体を発射させるとき、飛翔体が種別の異なる敵機に対しても容易かつ適切に対応できるようにする。
【解決手段】 捜索レーダ1が空間を捜索して目標Aを検出し、判定器2がその検出した目標Aの種別を判定する。
捜索レーダ1がキャッチした目標Aに向けて飛翔体6が発射され、飛翔体6が目標Aを検知して追尾するとき、予め判定器2によって判定された目標Aの種別に対応した目標検出プログラム(A1,A2,・・・An)が選択されて飛翔体6に送信供給される。
従って、飛翔体6は、異なる種別の目標Aに対応した操舵翼66a,66bに対する目標位置情報を、その送信供給された目標検出プログラムに基づき生成できるので、格別複雑な構成を採用することなく、異なる複数種別の目標Aに対応することができる。
(もっと読む)
航空交通制御システムに用いられる情報処理装置
【課題】本来のシステムによる警報出力が不能な状態となったとしても、簡易方式によって警報監視を継続して警報出力することを可能にする。
【解決手段】情報処理装置14において、レーダ装置10からレーダ情報を取得するレーダ情報取得部21を設ける。制御部20は、レーダ情報取得部21により取得されたレーダ情報をもとに、航空機と同航空機に対して衝突の可能性がある対象物の位置を表示制御部35を通じて表示装置37において表示させる。衝突判定処理部24は、制御部20により表示される航空機と対象物の位置とが重なるか否かに基づいて航空機の対象物に対する衝突の可能性を判定する。制御部20は、衝突判定処理部24により衝突の可能性があると判定された場合に警報を出力する。
(もっと読む)
監視レーダ装置
【課題】応答信号に対する受信感度を向上させるために、簡易な構成により、減衰特性が大きく、群遅延特性のばらつきが小さい受信フィルタ特性を実現し得る監視レーダ装置を提供する。
【解決手段】各IF信号をバンドパスフィルタ53−1〜53−3に通す前に、各IF信号をA/D変換器51−1〜51−3にてアナログ信号からデジタル信号に変換し、I/Q検波器52−1〜52−3にて複素形式のデジタル信号(I信号、Q信号)に変換してバンドパスフィルタ53−1〜53−3に通すように構成している。
(もっと読む)
防犯センサ
【課題】誤報の発生を極力防止して的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの前記マイクロ波の反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向に対応する鉛直角情報を出力するマイクロウエーブセンサ110と、前記距離情報が、前記鉛直角情報と設置されている位置の高さ情報とに応じて定められている所定距離範囲内である場合に、前記検知エリア内に検知対象物体が存在していると判別する検知対象物体存在判別手段120と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段130とを備える。
(もっと読む)
地表面変位監視方法および地表面変位監視システム
【課題】低コストで、信頼性が高く、保守も容易である地表面変位監視システムを実現する。
【解決手段】GPS機能と外部との送受信を行う通信機能とを有し独立電源を備えた親局装置とこの親局装置を中心にその周りに配設され親局装置から給電されると共に当該親局装置へ位置情報信号を送信する子局群とで構成され、それぞれ地表面変位監視領域に配設された複数個の地表面変位面的検出装置A,B,C,・・・および地表面変位面的検出装置の各々の検出情報を収集し監視装置へ各地表面変位面的検出装置での検出情報を提供するデータ収集サーバ6を備え、地表面変位面的検出装置の各々がデータ収集サーバに至る無線ネットワークを自律的に構築する機能を有し、子局群4A1,・・・4B1,・・・を介して得られた地表面変位面的検出情報が、自律的に構築された無線ネットワークを介して監視装置によって監視される。
(もっと読む)
無線通信システムと無線通信装置および測距方法
【課題】動作周波数を高く設定しなくとも、高い精度で距離を測定する。
【解決手段】クロック信号MCKの周期よりも遅延量が短い遅延素子を用いて、遅延部12から遅延クロック信号DCK-1〜DCK-5を得る。測距信号PMの送出時に、タイミング情報生成部13は、クロック信号MCKや遅延クロック信号DCK-1〜DCK-5を用いてカウント動作を開始する。応答信号PRを受信したときのカウント値に基づいて、クロック信号MCKを用いたカウント動作のカウントタイミングと応答信号PRの受信タイミングとのタイミング差TEを検出する。距離演算部16は、タイミング差TEとクロック信号MCKを用いたカウント動作での応答信号PRを受信したときのカウント値DCを用いて経過時間を算出し、この経過時間に基づいて距離を算出する。
(もっと読む)
施設利用者管理装置、利用者側端末装置、対象物管理装置、施設利用者管理プログラム、利用者側端末プログラム、対象物管理プログラム
【課題】迷子の子どもを捜している親が複数ある場合でも、確実に自身の迷子になった子どもの情報を得られるなど、施設利用者が関連付けて管理されている他の施設利用者の位置情報を迅速且つ確実に得られる管理装置を提供する。
【解決手段】複数の施設利用者が携帯するそれぞれの携帯型記録手段からの識別情報を関連付けて管理する関連付け情報管理手段と、1の携帯型記録手段の識別情報を用いた他の携帯型記録手段の現在位置の問合せがあった場合、前記関連付け情報管理手段から1の携帯型記録手段に記録の識別情報と関連付けて管理されている識別情報を抽出する抽出手段と、抽出した識別情報についての現在の位置情報を取得する位置情報取得手段と、前記位置情報取得手段で取得の現在位置情報を、関連付けられている他の施設利用者の現在位置情報として、1の携帯型記録手段を携帯する施設利用者に出力する位置情報出力手段とを備えた。
(もっと読む)
防犯センサ
【課題】検知対象物体の移動方向や位置に関わらず常に的確な検知を行うことができる信頼性の高い防犯センサを提供する。
【解決手段】検知エリアに向けてマイクロ波を送信し、この検知エリア内に存在する物体からの反射波を受信して、その物体までの距離に対応する距離情報を出力するとともに、その物体の方向情報を出力するマイクロウエーブセンサ320と、これによって得られる2次元物体位置情報の時間的な変化に基づいて前記物体の移動パターンを認識し、その移動パターンに基づいて前記検知エリア内に検知対象物体が存在しているか否かを判別する検知対象物体存在判別手段332と、この検知対象物体存在判別手段によって検知対象物体が存在していると判別された場合に警告信号を出力するように制御する警告信号出力制御手段333とを備える。
(もっと読む)
衝突危険予測システム、および、プログラム
【課題】 航空機同士の衝突危険状態を適切に検出することのできる衝突危険予測システム等を提供する。
【解決手段】 レーダ装置1は、レーダスキャン等により、管制すべき各航空機の飛行位置、速度及び、方向を含む飛行情報を、それぞれ取得する。処理装置2は、レーダ装置1により取得された飛行情報に基づいて、各航空機の速度ベクトルを求め、速度ベクトル同士から定まる相対ベクトルを算定する。処理装置1は、予め定められた円柱形状からなる保護領域を、各航空機の飛行位置に対応する仮想空間にそれぞれ設定すると、この各保護領域に、算定した相対ベクトルに応じて半径等の長さが異なる扇形柱形状の領域を、各航空機の進行方向に対応させてそれぞれ付加し、各保護領域を拡張させる。そして、処理装置2は、拡張させた保護領域同士の重なりに基づいて、衝突危険状態を検出する。
(もっと読む)
レーダ装置
【課題】 クラッタマップ部を小型化し、クラッタによる誤警報を抑圧するレーダ装置を提供する。
【解決手段】 仰角情報及び送受信方向情報に基づき、低仰角走査時には、受信機の出力信号とメモリ203に蓄えられた信号との間で平均化処理を実施して結果をメモリ203に蓄え、中高仰角走査時には、低仰角走査時に処理されてメモリ203に蓄えられた方向j−1,j,j+1の信号に対して、ウエイト発生器204で発生した重み付け係数を乗算器201C〜201Eで乗算し、その結果得られた信号の総和を総和器205で計算する。
(もっと読む)
物体侵入センサおよびそれに使用するアンテナ装置
【課題】
簡単な構成で物体の侵入探知および方向探知を行う物体侵入センサおよびそれに使用するアンテナ装置を提供する。
【解決手段】
ダイポールアンテナである放射器11a、この放射器11aの両側に離れて平行配置された導波器11bおよび反射器11cを放射器11aの周りで回転且つ昇降可能にする昇降・回転機構18によりアンテナ装置11を構成し、この昇降・回転機構18の動作に応じて物体30の侵入探知モードおよび物体30の方向探知モードで動作する。
(もっと読む)
二次監視レーダ及び二次監視レーダ応答信号解析方法
【課題】不要なモードA/Cターゲットレポートの除去性能が改善された二次監視レーダ及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】質問信号を送信する送信部21と、質問信号に対する応答信号をトランスポンダ5から受信する受信部22と、これらに基づいてモードSターゲットレポートとモードA/Cターゲットレポートとを作成する信号処理部23と、モードSターゲットレポートからモードSトラックを生成し、モードA/CターゲットレポートからモードA/Cトラックを生成し、これらに基づいてモードSターゲットレポートとモードA/Cターゲットレポートとが同一航空機からのものであるか否かを判定し、モードSターゲットレポートとモードA/Cターゲットレポートとが同一航空機からのものである場合、モードA/Cターゲットレポートを棄却するコンバイナ26とを設ける。
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
マイクロ波イメージングのためのシステム及び方法
【課題】サイドローブを抑圧してマイクロ波画像を取得することができるマイクロ波イメージングシステムを提供する。
【解決手段】 相補的なサブアレイパターンを形成し、疎な幾何学的配列に配列されたサブアレイと、送信機及び受信機と、第1のモードで、送信機から相補的なサブアレイパターンの両方にマイクロ波照射を送信し、反射マイクロ波照射を受信機に与え、第2のモードで、送信機から相補的なサブアレイパターンのうちの第1のパターンに送信し、第2のパターンからの反射マイクロ波照射を受信機に与える照射ネットワークと、を備え、目標物にマイクロ波を照射して、目標物のマイクロ波画像を取得するマイクロ波イメージングシステム。
(もっと読む)
障害物検知レーダシステム
【課題】 レーダ送受信機の分解能を仮想的に細かくする。
【解決手段】 レーダ送受信機10は、水平広ビームアンテナから、複数の検出反射体2a〜2eを包含する広範囲の空間に放射されるレーダ波である送信波3を送信する。また、垂直偏波受信用と水平偏波受信用の2種類の受信アンテナと、これら受信アンテナを交互に切り替える為のスイッチを備える。一方、各検出反射体2a〜2eは、同一偏波用と異偏波用の2種類を交互に設置し且つ同一種類同士はレーダ送受信機10の距離分解能によって決定される最小間隔以上の間隔となるようにしてある。上記送信波3が水平偏波の偏波送信波である場合には、同一偏波用は水平偏波、異偏波用は垂直偏波を反射波としてレーダ送受信機10に返す。上記スイッチを交互に切り替えることで、レーダ送受信機10は、送信波3送信毎に、同一偏波用と異偏波用の何れか一方からの反射波による受信信号のみを入力する。
(もっと読む)
指向性電波を使用した個体通過監視装置
【課題】本発明による指向性電波を使用した個体通過監視装置は、同時に入る場合の不許可者の通過、通常で扉が開いている場合の不許可者の通過、通過路の範囲が広い場合の、検出したいエリアの外の通過体の信号も検出、監視カメラのみでは、個体の認識(許可・不許可の判断)は困難、以上のような従来品の不都合を回避した通過監視装置を提供することにある。
【解決手段】監視対象エリアに存在する監視対象体の有する認識符号のみを送受信可能とする指向性個体認識符号送受信器と、監視対象体が予め許可登録されたものであるか否かの判別をする許可不許可判別器と、ほぼ同じに監視対象エリア上に前記監視対象体が存在するか否かの判別をするか、又は/及び、監視対象エリア上に存在する監視対象体の個数を検出するかを行う個体検出センサーと、警報などの出力機器を制御する判別出力を行う制御器とを有することを特徴とする。
(もっと読む)
確率質量拡散によるモデルセットの適応
少なくとも1つのパラメータの一連の測定z,R;M;(t1,t2)を実行し且つ予測を再帰的に実行する方法。その方法は、少なくとも第1の測定インスタンス(M(tk);(k))に基づいて、少なくとも2つのモデル(C,S)に対する結果(x,P)を予測する工程と、次の測定インスタンス(M(tk+Tp)(k+Tp))の後、対応する時点に対するモデル(C,S)を更新し、これにより第1の測定インスタンスに基づいて行なわれる予測が次の測定インスタンスを考慮して更新される工程と、次の測定インスタンス(tk+Tp)(k+Tp)に対する少なくとも1つのモデル(C,S)を再配置し、これにより一方の更新モデルが他方の更新モデルに影響を及ぼす工程とを有する。少なくとも1つの補完(C)モデル及び少なくとも1つのサブ(S)モデルを含むモデルセットの場合、再配置の工程において、SモデルがCモデルに影響を及ぼすことはない。排他的な補完(L,N,R)モデルを含むモデルセットの場合、再配置の工程において、モデルセット(L,N,R)内のモデルの所定の対に対して、より高い確率(μ)を有するモデルはより低い確率を有するモデルに影響を及ぼすが、より低い確率(μ)を有するモデルがより高い確率を有するモデルに影響を及ぼすことはない。 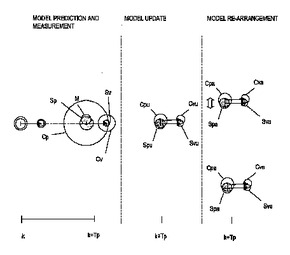 (もっと読む)
(もっと読む)
検出領域の設定装置
【課題】
監視領域を撮影した画像を用いて、監視可能な領域内の床面から高さのある任意の領域を検出処理の対象である検出領域として設定する設定装置を提供する。
【解決手段】監視領域を撮影した画像を表示し、画像上の二次元座標情報を床面上と床面以外とに区別して検出領域を指定するための指定点を入力し、床面上の指定点の二次元座標情報と撮像パラメータおよび床面以外の指定点の二次元座標情報を用いて床面以外の指定点の高さ情報を算出し、床面上の指定点は総て基準の高さ情報とし、床面以外の指定点は前記算出した高さ情報を用いて、画像上の二次元情報を三次元情報の検出領域情報に変換して検出領域情報とする設定装置。
(もっと読む)
二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法
【課題】応答信号の受信異常の有無を通知することが可能な二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】応答信号を解読し、これが正常な信号であるか否かを判定する信号解読部18と、応答信号の全ての内容及び判定の結果を時刻と共に表示する表示部23と、判定の結果を時刻と共に記録する記録部21とを設ける。
(もっと読む)
541 - 560 / 685
[ Back to top ]