
Fターム[5J070AH39]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829)
Fターム[5J070AH39]の下位に属するFターム
Fターム[5J070AH39]に分類される特許
241 - 260 / 541
広帯域レーダ装置
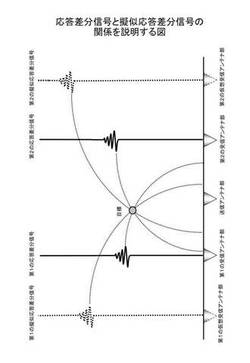
【課題】レーダ装置に関し、特に、超広帯域の電波を送受信して移動物体等の目標の位置を高精度で検出する広帯域レーダ装置に関し、複数の受信波を合成して目標物体の距離や方位等を検出するレーダ装置において、送信及び受信アンテナ間の距離が小さく、目標物体が広帯域レーダ装置から距離が離れた場合でも、目標物体の方位精度を高めた小型かつ超広帯域レーダ装置を得る。
【解決手段】2つの受信アンテナ部で受信した2つの受信パルス信号が、サンプリング積分検波されて2つのデジタル信号に変換された後、移動物体を検出した2つの応答差分信号が得られる。2つの信号から、任意の距離離れた第1の仮想受信アンテナ部及び第2の仮想受信アンテナ部で受信する擬似応答差分信号が算出される。この信号を用いて移動目標の距離と方位を検出することで、目標物体の距離がある程度離れても、方位精度を高めることができる。
(もっと読む)
レーダ装置、及びターゲットの速度進行方向推定方法

【課題】特に、ターゲットの速度が遅いときに、精度の高いターゲットの速度、及び進行方向を推定できるレーダ装置を提供する。
【解決手段】ターゲットの速度、及び進行方向を推定して衝突予測を行うレーダ装置であって、所定の時間一定の周期でターゲットを捕捉するターゲット捕捉部と、ターゲット捕捉部が捕捉した捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する衝突予測部と、衝突予測部の推定したターゲットの速度が所定速度以下である場合、推定したターゲットの速度に応じてターゲットを捕捉する時間を増加させて捕捉点の数を増加させるターゲット捕捉制御部とを備え、衝突予測部は、前記ターゲット捕捉制御部が捕捉点の数を増加させた後の全ての捕捉点に基づいて、ターゲットの速度、及び進行方向を推定して衝突を予測する。
(もっと読む)
画像レーダ装置および画像レーダシステム
【課題】演算量が少なく、計算負荷および計算要求の小さな画像レーダ装置および画像再生装置を得る。
【解決手段】1つの送信アンテナ10と複数の受信アンテナ11及び12を用いて、送信アンテナ10から放射され観測対象で反射されたレーダビームを複数の受信アンテナ11及び12で受信する画像レーダ装置であって、受信アンテナ11及び12と送信アンテナ10との間隔の2乗がレーダ波長と観測対象のレンジとの積の2倍に比べ十分に小さくなるようにした。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、S/N比に優れた電波センサを提供する。
【解決手段】送信信号を生成する発振回路と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極と、基板1の他方の表面に形成された、送信信号として電波ビームを前方に放射する矩形状の複数の送信電極3a、3bと、複数の送信電極から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路とを備え、複数の送信電極3a、3bを電力均等分配回路となる伝送線路にて相互に接続し、個々の送信電極に伝播される送信信号の電力を小さくする。
(もっと読む)
物体検出装置
【課題】物体との正確な相対位置及び相対速度を検出する。
【解決手段】物体検出ECU1は、レーダセンサ2を介して、所定時間ΔT2毎に、物体の相対位置及び相対速度をそれぞれ検出する位置検出部13及び速度検出部14と、検出された相対位置を、第1線形フィルタを介して補正し、補正された相対位置である補正位置を求める位置補正部17と、求められた補正位置に基づき、第2線形フィルタを介して、補正された相対速度である補正速度を求める速度補正部18と、を備え、第1線形フィルタが、前回の前記補正速度に基づき、今回の前記補正位置を求めるフィルタであり、第2線形フィルタが、前回の前記補正速度に基づき、今回の前記補正速度を求めるフィルタであり、位置補正部17及び速度補正部18が、補正速度の初期値として、速度検出部14によって検出された相対速度を設定する。
(もっと読む)
SAWチャープZ変換器
【課題】
移動体通信分野での使用できるSAWチャープZ変換器を実現すること。
【解決手段】
本発明のチャープZ変換器は、圧電体基板の一方の主面にコリレータとして機能するダウンチャープSAW分散型遅延線を他方の主面にチャープ信号発生用分散型遅延線として機能する二つのアップチャープSAW分散型遅延線を配置し、これらのSAWコリレータとSAW分散型遅延線からの各々の出力信号を混合器にミキシングしてチャープZ変換器を構成してなる。
【効果】 以上のとおり、本発明のSAWチャープZ変換器は、レーダ分野に限定されることもなく、しかもチャープ信号処理によるFDM/TDM変換は衛星通信や無線基地局などの多数の端末局からの信号処理や測位に応用でき、その工業的価値は極めて高い。
(もっと読む)
レーダ装置
【課題】クラッタのドップラー周波数折り返し発生時にこれを補正したクラッタ中心周波数推定処理を行うことでクラッタの消え残りを防止するレーダ装置を得る。
【解決手段】パルスレーダの受信信号からクラッタの数と中心周波数を推定するための信号を抽出するクラッタ推定用データ抽出手段1、抽出された信号から受信されたクラッタの数を推定するクラッタ数判定手段2、クラッタ数判定結果から実施するクラッタ抑圧処理の内容を切り替える切替器3、抽出された信号とクラッタ数判定結果を用いて、クラッタの周波数折り返しが発生する場合に生じる推定誤差を回避してクラッタ中心周波数推定を行う折り返し補正付クラッタ中心周波数推定手段4、切替器によりクラッタの数に従って処理内容が決定され、折り返し補正付クラッタ中心周波数推定手段から転送されるクラッタ中心周波数推定値を入力して、受信信号中のクラッタを抑圧するクラッタ抑圧処理部5を備える。
(もっと読む)
移動体検知装置及び移動体検知方法
【課題】精度良く移動体を検知できる簡易な構成の移動体検知装置及び移動体検知方法を提供する。
【解決手段】
車両に送信する送信波を発振する発振部と、発振部が発振した送信波を送信すると共に送信した送信波の反射波を受信する送受信部と、送受信部が受信した反射波が変動させる発振部のバイアス電圧を検出する検出部と、検出部が検出したバイアス電圧の変化に基づいて車両において移動する移動体を検知する検知処理を実行する移動体検知部とを備える移動体検知装置であって、移動体検知部は、検出部で検出するバイアス電圧に基づいて発振部に異常が生じたか否かを判定する判定処理を更に実行する。これによれば、移動体の検知に用いる発振部のバイアス電圧に基づいて発振部に異常が生じたか否かを判定するため、簡易な構成で精度良く移動体を検知できる。
(もっと読む)
追尾装置
【課題】角度バイアス及び距離バイアス推定精度の高精度化と、バイアス推定の演算時間の高速化を図ることができる追尾装置を得る。
【解決手段】センサ群10、観測値が同一目標から得られた観測値であるかを判定し、同一目標からの観測値の集合を蓄積する観測値データベース30、データベースから同一目標からの観測値を抽出する観測値出力制御処理部40、推定すべき全バイアス成分を、複数組割り当てるバイアス成分組割当処理部50、割り当てられたバイアス成分組毎に設けられた、バイアス成分組初期値設定処理部、バイアス成分組推定処理部及びバイアス成分組収束判定部、バイアス成分組毎のバイアスベクトル推定値とその誤差共分散行列を時系列に蓄積するバイアスデータベース90を備える。
(もっと読む)
複合センサ装置
【課題】被探知性を低下させつつ追尾性能を向上させた、小型かつ低消費電力の複合センサ装置を得る。
【解決手段】パッシブセンサ及びアクティブセンサによる目標の観測値を融合し、これを等速直線運動等の所定の運動モデルに基づき構成された追尾フィルタによりフィルタリング処理を行って、その処理結果と観測値との残差、すなわち、所定の運動モデルと異なる目標の運動を、目標のマニューバとして検出し、マニューバ段階値として定量化する。そして、このマニューバ段階値が変化した場合、及びフィルタリング処理による目標の平滑誤差共分散行列または予測誤差共分散行列から算出される誤差共分散成分が所定のしきい値を越えた場合の少なくとも1つの場合に、継続して観測を行っているパッシブセンサに加え、アクティブセンサによる観測を行うように観測スケジューリングを制御する。
(もっと読む)
無線タグ距離測定装置
【課題】無線タグ距離測定システムにおいて、複数の無線タグから送信される応答信号の干渉を回避すること、および距離測定精度を向上させることを目的とする。
【解決手段】無線タグ距離測定装置10は、距離測定対象の無線タグの固有割り当てPN符号に応じて値が変化するPN信号を生成し、さらにPN信号に基準正弦波信号を乗じた正弦波PN信号を生成する。そして、正弦波PN信号を無線信号に変換した拡散パルス変調信号を送信する。無線タグ距離測定装置10は、無線タグによって拡散パルス変調信号に対して時間圧縮処理が施された圧縮パルス変調信号を受信する。無線タグ距離測定装置10は、正弦波PN信号を生成する元となった基準正弦波信号と、受信した圧縮パルス変調信号に含まれる基準正弦波信号との位相差に基づいて、無線タグまでの距離を算出する
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】信号を受信し、変換,チャネル歪みの補償,復調し、複素数を形成する。また、復調信号から基準信号および目標物信号を推定する。この目標物信号内の基準信号の一部を減らすため、基準信号は、目標物信号に関して適応的にフィルタリングし、目標物信号と結合して、基準信号の一部を減らす。目標物信号および基準信号に対して逆変換オペレーションを実施し、出力目標物信号について、複数の目標物ビームを形成する。複数の目標物ビームのそれぞれについて、間引きした複数のラグ積を形成する。基準信号について、間引きした複数のラグ積を形成する。複数の目標物ビームのそれぞれについてクロスアンビギュイティ関数を推定する。基準信号についての上記間引きした複数のラグ積を用いて、基準信号についてオートアンビギュイティ関数を推定する。
(もっと読む)
パルス間送信および受信を用いた双方向測距
たとえば、測距ノード(たとえば、デバイス)間の相対クロックドリフトが比較的高いときに正確な測距測定を可能にするために、双方向測距に関連して比較的短いターンアラウンドタイムを提供する。いくつかの態様では、ノード間の測距メッセージの同時送信を可能にするように規定された対称チャネルの使用によって、比較的短いターンアラウンドタイムが達成される。たとえば、送信測距メッセージに関連するパルス送信の間に受信測距メッセージに関連する1つまたは複数のパルスを受信するようにノードを構成することによって、対称チャネルを確立することができる。このようにして、1つのノードは、他のノードが測距タイムスタンプを送信した直後にその測距タイムスタンプを送信し、それによって測距測定に対するクロックドリフトの影響を緩和することができる。いくつかの態様では、パルスは超広帯域パルスを備えることができる。本明細書で説明する技法は、たとえば、低電力ワイヤレスデバイスおよび/または非コヒーレントワイヤレスデバイスにおける双方向測距を行うために採用できる。  (もっと読む)
(もっと読む)
レーダ装置制御方法、レーダ装置、移動体および送受信装置
【課題】他の移動体の相対向きを算出することができるレーダ装置制御方法、レーダ装置、移動体および送受信装置を提供すること。
【解決手段】移動体の所定の位置に設置された複数の送受信部が、移動体番号と設置位置番号とを含む信号を送信し、他の移動体に設置された複数の送受信部から送信される信号を受信した場合に、信号を受信した受信部、信号を送信した他の移動体、信号を送信した送信部が設置されている位置を特定することにより、他の移動体の相対向きを算出する。
(もっと読む)
到来方向推定装置
【課題】3つ以上のセンサあるいはアンテナを同時に使って、レーダ波等の到来方向を推定する。
【解決手段】レーダ波の到来方向を推定するための演算式は、sin-1(a×tan-1b)の形をしている。aは、アンテナ間隔dと使用するレーダ波のキャリア等の波長λで決まるd/λとなるが、3つ以上のアンテナを同時に使うことによって、aを第1のアンテナ間隔に基づく値d0/λと第2のアンテナ間隔に基づく値d1/λの差に依存する値にすることができる。したがって、到来方向の測定範囲を広く取ろうとする場合、アンテナの絶対間隔d/λを調整するのではなく、(d1−d0)/λを調整すればよいので、アンテナ設計上の制約が緩和され、到来方向の測定範囲を適切に設定する。
(もっと読む)
航空機の識別方法、並びにそれを用いた航空機騒音の測定方法及び信号判定方法
【課題】民間機と軍用機を含めた航空機の識別方法を提供する。
【解決手段】航空機が放射する電波高度計電波、対空・対地走査電波、気象レーダ信号、敵味方識別信号、及び/又はトランスポンダ応答信号の電波の周波数掃引又はパルスの変調方式及び/又は偏波面の違いを解析することによって、上空を飛行する各航空機の自動識別を行う。そして、民間機と軍用機の飛行空域が重なる場所での航空機騒音の自動測定を行う。また、航空機の自動識別方法を用いて演算処理した航空機の自動識別データを騒音測定の測定開始トリガーや統計処理を用いた信号判定に用いる。
(もっと読む)
小便器洗浄装置
【課題】 小便器の設置環境の影響による人体誤検出を無くし、使用人数の多少に関わらず人体検出の精度を上げる。
【解決手段】 小便器と、小便器のボール部内空間を洗浄する為の水を供給する給水部と、小便器の前方に向けてマイクロ波を送信及び受信を行い検出データを出力するドップラーセンサーと、検出データ値に応じて小便器への人体の接近又は人体の放出する尿流を判別するコントローラと、コントローラでの判別した結果に応じて給水部のバルブを制御する小便器洗浄装置において、コントローラは、さらに人体接近又は尿流の検出回数を計時するとともに、検出回数が規定数に達するまでは、検出データ値が人体の接近を想定した第一接近データ値以下で且つその後尿流と判別した検出データを抽出し真の人体の値である接近データとして蓄積して、接近データの最低値を接近検出判断値として設定することを特徴とする
(もっと読む)
レーダ装置
【課題】MUSIC法を用いた方位推定に際し、不等間隔アレーアンテナを採用することによって生じる非所望ピークの影響を抑え、高精度に物標方位を推定可能にすること。
【解決手段】レーダ装置は、受信信号に基づき自己相関行列を算出すると共に(S110)、当該行列の固有値を求め(S120)、閾値より大きい固有値の数から到来波数Mを推定する(S130)。また、各固有値に対応する固有ベクトルを用いて、MUSICスペクトルを算出し(S160)、MUSICスペクトルから、推定した到来波数Mより所定量α多い数のピークを抽出する。そして、各ピークに対応する方位を、検査対象方位に設定する(S170)。そして、検査対象方位のステアリングベクトル間の相関を、高低の二段階で判定し、相関が高い場合には、電力推定対象に設定する方位の数M’を、M+αに設定し、相関が低い場合には、数M’を、推定した到来波数Mに設定する。
(もっと読む)
先行車両の位置検出方法及び位置検出装置並びにデータフィルタリング方法
【課題】先行車両の位置データの算出精度を向上することができる位置検出方法及び位置検出装置を提供する。
【解決手段】自車両1に対する先行車両2の位置を検出する方法であって、車間距離情報riと横位置情報Li,Riからなる一次データセットを取得する工程と、一次データセットの車間距離情報riに対して線形回帰処理を行い、得られた線形回帰線との差が所定の閾値以下の車間距離情報riとこれに対応する横位置情報Li,Riとからなる二次データセットを取得する線形回帰処理工程と、この二次データセットの横位置情報Li,Riに対してクラスタリング処理を行い、最大のクラスタに含まれる横位置情報Li,Riとこれに対応する車間距離情報riとからなる三次データセットを取得するクラスタリング処理工程と、この三次データセットを用いて現在時刻t0における車間距離と横位置とを算出する位置情報算出工程とを備えた。
(もっと読む)
レーダ装置
【課題】 従来のレーダ装置は、マルチパス環境下で安定した追尾を行うため、誘導信号に重畳するノイズ成分を、ハイパスフィルター、ピークホールド回路等による補正を実施していたが、シンチレーション等により目標のS/Nが劣化した場合、マルチパスによる虚像からの反射波が支配的となり、虚像に誤ロック及び誤追尾するという問題があった。
【解決手段】 マルチパス判定部を備え、アンテナを振りながら目標と虚像の両方を受信し、アンテナ角度とロックオンフラグをマルチパス判定部に入力する。マルチパス判定部では、下方向から受信する信号を虚像と判定し、キャンセルする。これにより、マルチパスによる虚像に誤ロックする問題点を解消する。
(もっと読む)
241 - 260 / 541
[ Back to top ]