
Fターム[5J070AH39]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829)
Fターム[5J070AH39]の下位に属するFターム
Fターム[5J070AH39]に分類される特許
221 - 240 / 541
制御装置
【課題】駐車スペースの形状を算出するための処理負担を軽減できる制御装置を提供する。
【解決手段】制御装置は、車両1を基準として、所定角度毎(5度毎)に放射状に延びる線上に位置すると共に駐車スペース200を区画する各壁200b〜200dまでの距離を距離センサ26aにより検出し、その検出結果から駐車スペース200の形状を算出するので、カメラにより入力される画像を1画素ずつ解析して駐車スペース200の形状を算出する場合に比べて、制御装置のCPUの処理負担を軽減できる。
(もっと読む)
ネットワークレーダシステム

【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
パルス検出装置及びパルス検出方法
【課題】最小受信感度を向上させてパルスがノイズの影響を受けた場合でもパルスを容易に検出する。
【解決手段】受信信号を所定の第1周波数の帯域で制限して得られた信号の振幅レベルを積分し、第1積分信号を求める第1積分器113と、受信信号を第1周波数よりも低い所定の第2周波数の帯域で制限して得られた信号の振幅レベルを積分し、第2積分信号を求める第2積分器114と、第1積分信号と第2積分信号とを比較する比較部115と、比較部の比較結果に応じて受信信号から所定周波数のパルスを検出するパルス検出部116とを備える。
(もっと読む)
地中レーダ
【課題】地中の掘削作業に先立って埋設状況を調査する際に、埋設物の位置を探知するだけでなく、地中の埋設物が金属物体か非金属物体かを識別可能とする地中レーダ。
【解決手段】地中に向けて電磁波を送出する電磁波送信部4と、送出された該電磁波に基づいて反射された電磁波を受信する電磁波受信部5とを有し、該電磁波受信部5によって受信された電磁波に基づき地中に埋設された埋設物9を探知する地中レーダ1において、前記電磁波受信部5で受信された電磁波の受信波形19と前記電磁波送信部4から送出される電磁波の送信波形12との相互相関処理、及び該受信波形19の自己相関処理を行う相関処理部22と、前記相関処理部22により得られる相互相関値と自己相関値との比率を算出し、算出した該比率に基づいて前記地中に埋設された埋設物9が金属物体であるか非金属物体であるかを識別する識別部7とを備えた構成とした。
(もっと読む)
センサ装置
【課題】人や人の差し出す手が設備機器に到達する直前など、被検知体の動きに応じた最適なタイミングで設備機器の運転を開始することができるセンサ装置を提供する。
【解決手段】発振回路と、電波を送受信するアンテナと、物体の有無およびその速度を検知する検知部と、前記検知部から得られる検知信号に基づき外部の機器へ出力信号を出力する制御部と、を備えたセンサ装置であって、前記制御部は被検知体の速度が第一の閾値より高い状態から前記第一の閾値以下の状態に変化した後、所定時間の間、前記第一の閾値よりも高い速度状態に変化しないことを識別し、前記外部の機器へ出力信号を出力するか否かを切り替える。
(もっと読む)
水栓装置
【課題】 水栓装置を利用する人が、差出す被洗浄物によっては水が出ない状態になる。
【解決手段】
ドップラーセンサと、吐水口と、前記吐水口から吐水された水を受水する受水部と、前記吐水口からの吐止水を切り替えるためのバルブと、前記バルブの駆動を制御するための制御部と、を備えた水栓装置であって、速度成分のうち低速度成分のみを検知するための低速抽出部をさらに備え、前記制御部は、被洗浄物が吐水口に到達する前に吐水を開始させるために、前記低速抽出部により低速度成分が検知されたときの、低速度成分以外の他の速度成分の検知情報に基づいてバルブの駆動を制御し、前記吐水口からの吐止水を切り替えることを特徴とする水栓装置を提供することである。
(もっと読む)
センサ装置
【課題】人や手などが目標物の到達地点に達する直前など、被検知体の動きに応じた最適なタイミングで設備機器の運転を開始することができるセンサ装置を提供する。
【解決手段】発振回路と、電波を送受信するアンテナと、物体の有無およびその速度を検知する検知部と、前記検知部から得られる検知信号に基づき外部の機器へ出力信号を出力する制御部と、を備えたセンサ装置であって、速度成分のうち低速度成分のみを検知するための低速抽出部をさらに備え、前記制御部は、被検知体が外部機器に到達する前に前記外部の機器を運転するために、前記低速抽出部により低速度成分が検知されたときの、低速度成分以外の他の速度成分の検知情報に基づいて前記外部の機器へ出力信号を出力するか否かを切り替える。
(もっと読む)
吐水装置
【課題】使用者側又は設置されたセンサ側へ水はねして検知精度が低下することを防止する。
【解決手段】吐水部1と、凹形状部を有する受水部2と、吐水部1に向かって電波を放射し、放射した電波の反射波によって、被検知体の移動に関する情報を取得するセンサ3と、を備えた吐水装置であって、受水部2は、側面視において凹形状部と変曲部を介してなめらかに連結される凸形状部を有し、センサ部3は、変曲部よりも凸形状部側に配置された吐水装置の提供。
(もっと読む)
アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法
【課題】アンテナ回転からアンテナ回転にかけてのレーダブリップの多次元時間的運動フィルタリングの方法を提供する。
【解決手段】主に、検出システムの処理サブシステムから供給されるブリップを、トラック生成のために解析する前に、格付けすることを可能にする方法からなり、各トラックは、検出された移動目標の軌道を表すと仮定される。解析継続時間が考慮され、解析継続時間の間に検出されたすべてのブリップが考慮される。これらのブリップは、サブセットに分割され、各サブセットは、初期位置および速度ベクトルで定義された同一解析チャネルにおいて解析継続時間の間に検出されたブリップに対応する。このように形成されたサブセットは、グループ分けされ、同一グループが、複数の属性の結合されたアサーションが妥当と判断されたブリップを含むサブセットを結合する。
(もっと読む)
任意信号発生装置
【課題】比較的低い周波数のサンプリング周波数を用いつつ、生成する信号の周波数帯域を拡張し、より高周波域までの任意波形の信号を生成可能とする。
【解決手段】目的信号を離散フーリエ変換した周波数領域の複素スペクトルをP組の信号成分に分割し、低サンプリングクロックで動作するP個の信号モジュールSG1,SG2,SG3,…,SGPに分配して分割処理し、それぞれの出力を合成することにより、任意信号を生成する。各信号モジュールは、分配された信号成分を逆離散フーリエ変換器10で逆離散変換し、デジタル信号処理の困難な高周波成分は、逆離散フーリエ変換出力を直交変調器17でアップコンバートする。これにより、並列数Pに反比例した低速のクロックで各信号モジュールSG2,SG3,…,SGPを動作させることができる。
(もっと読む)
動的構成可能な非干渉信号処理を伴う監視システム
【課題】動的構成可能な非干渉信号処理を伴う監視システムを提供する。
【解決手段】機械105の動作管理に関するデータと、機械105の安全管理に関するデータとが、相互に干渉しないよう重ね合わせられる。機械105に生じる状態を示す生データを取得し、生データから複数の波形を生成し、波形により生データの周波数情報を視覚的に表現し、動作管理に関する測定値及び安全保護に関する測定値が決定されるよう、波形に対して実行される信号処理操作を定義するデータパスを形成するよう、信号処理ブロックを動的にリンクさせる。
(もっと読む)
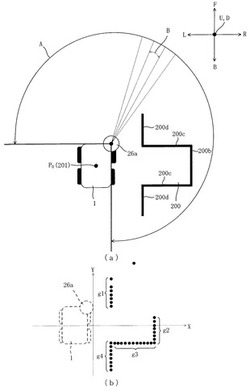
検出装置および方法、並びにプログラム
【課題】ランダムに検出される検出位置情報に基づいて、正確に物体の進行方向および速度を検出できるようにする。
【解決手段】検出位置特定部81は、検出された物体の検出位置における速度、距離、および角度に基づいて、物体の相対的な検出位置を特定し、含有数カウント部86は、物体の相対的な検出位置を時刻に対応付けて、水平方向の検出位置を示す軸と進行方向の検出位置までの距離を示す軸とで設定される2次元の平面上にプロットし、物体の進行方向の先頭部分が所定時間内に通過すると予想される平面上の形状からなるフレームを所定の回転角度で回転させながら、回転角度毎にフレーム内に含まれるプロットされた検出位置の数をカウントし、方向決定部87は、カウントされたプロット数が最大となるフレームの回転角度に基づいて、物体の存在する存在位置、および進行方向を決定する。本発明は、車両安全装置に適用することができる。
(もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
方位検出装置
【課題】少ないアンテナ数で多くのターゲットを同時に且つ高い方位分解能で検出できる方位検出装置を提供する。
【解決手段】送信ビーム及び受信ビームの指向性パターンがいずれも一つのヌルを有し、且つ、送信ヌル方向及び受信ヌル方向を方位検知範囲内で順次変化させながら探査波の送受信を行って受信電力を測定し(S110〜S150)、その受信電力が極小となる送信ヌル方向及び受信ヌル方向の組合せを抽出し、その抽出した送信ヌル方向及び受信ヌル方向のそれぞれを別個の物標が存在する方位として検出する(S160〜S170)。このように、送信ビーム及び受信ビームの指向性パターンにおける送信ヌル方向及び受信ヌル方向を独立に制御しているため、送信ヌル数と受信ヌル数とを合計した数の物標を同時に且つ高い方位分解能にて検出することができる。
(もっと読む)
マイクロ波およびミリメートル波レーダセンサ
【課題】乗り物用のレーダセンサシステムおよび方法を提供すること。
【解決手段】例示のレーダシステムは、処理装置(22)と、(1つまたは複数の)アンテナ(24)を有する複数の送受信器とを含む。送受信器のアンテナは、乗り物の周りの様々な点に配置される。送受信器は、対応するアンテナと通信する受信および送信電子回路を含む。送信電子回路は、アンテナを通じてレーダ信号を出力する。送信電子回路は、電圧制御発振器(VCO)、誘電体共振器型発振器(DRO)、位相ロックループ(PLL)構成要素、およびダイレクト・デジタル・シンセサイザ(DDS)を含む。受信電子回路は、出力されたレーダ信号に対応するあらゆるレーダ反射をアンテナから受け取り、それらのレーダ反射に関連する信号を処理装置に送る。処理装置は、複数の送受信器から受け取った信号に基づいて出力信号を発生する。
(もっと読む)
レーダ装置の制御方法、レーダ装置、プログラム
【課題】レーダ装置において、対象物の測定精度を向上させる。
【解決手段】FM−CWレーダ機能とパルスレーダ機能とを併せ備えたレーダ装置において、FM−CWレーダ機能による対象物の測定(ステップ121)と、FM−CWレーダ機能で得られた距離データの部分だけでのパルスレーダ機能による測定と、これらの測定結果の比較(ステップ122)と、パルスレーダ機能で、FM−CWレーダ機能の測定結果の距離に対象物を検知できない場合、矛盾があった距離データの電力ピーク値の近傍のスライス値(Th1)を下げて行う再度のピーク探索と再ペアリング(ステップ124)とにより、レーダ装置による対象物の距離や速度の測定精度を向上させる。
(もっと読む)
信号波到来角度測定装置
【課題】ESPRIT測角処理における誤った測角結果を排除できる信号波到来角度測定装置を提供する。
【解決手段】観測対象の信号波を電気信号に変換するセンサ群2で変換された電気信号から信号波の角度測定に必要な観測データベクトルを生成する観測データベクトル生成部3と、観測データベクトル生成部3により生成される観測データベクトルから信号波の到来角度を算出するESPRIT測角処理部4と、ESPRIT測角処理部4におけるESPRIT測角処理の測角処理過程データから到来する信号波の到来角度以外の情報を推定する到来信号波推定部5と、到来信号波推定部5の推定結果に基づいてESPRIT測角処理部が算出する到来角度の測角結果の正誤を判断して、誤った測角結果を排除する正誤判断部6とを備える。
(もっと読む)
電波センサ
【課題】センサ前方に存在する被検知体の有無や移動状態を精度良く検出する、電波ビームの放射方向を制御しS/N比に優れた低消費電力、且つ小型の電波センサを提供する。
【解決手段】送信信号を生成する発振回路9と、誘電体からなる基板1の一方の表面または内部の略全面に形成された送信信号のグランドとして作用する接地電極2と、他方の表面に形成された、送信信号を電波ビームとして前方に放射する矩形状の送信電極3と、送信電極3から放射され被検知体に衝突し反射して戻ってきた電波ビームを受信信号として受信する矩形状の受信電極4と、何れか一方の端子が接地電極2のみに接続され、受信電極4にて受信した受信信号を検波する検波素子5と、検波素子5にて検波された受信信号を外部に出力する出力線路6とを備え、検波素子5の他方の端子と出力線路6は受信電極4の異なる位置に各々、接続される。
(もっと読む)
レーダ装置
【課題】超分解能測角処理時に、不要な他の信号が混入して誤った方位角が得られることがある。
【解決手段】複数目標との相対距離や相対速度を算出し、超分解能測角処理を行う演算装置13を用いて方位角を測定するレーダ装置において、前記演算装置13は、検出したある目標について、2つの方位角が得られた場合、検出した他の目標の中から、方位角が前記2つの方位角のいずれかに等しく、かつ上昇または降いずれかの変調時にビート信号の周波数が等しい目標を探す他信号検出処理を行い、前記他信号検出処理により、条件を満たす他の目標が検出された場合には、前記検出したある目標の2つの方位角のうち、他信号検出処理により検出された他の目標の方位角と等しい側の方位角を削除するようにした。
(もっと読む)
物体または生物の存在を検知する装置
本発明は、2つの端点間の物体または生物の存在を検知する装置(1)に関する。この装置(1)は、一方では、第1の端点に関連付けられた放射アンテナ(20)を含む、電磁信号を発する手段(2)、およびこのアンテナ(20)を励振して、このアンテナ(20)がそのような信号を放射するようにする手段(21)、他方では、第2の端点に関連付けられた受信アンテナ(40)を含む、この電磁信号を受信する手段(4)、およびそのような信号を検出する手段(41)を含む。この検知装置(1)は、放射アンテナ(20)および受信アンテナ(40)が各々、少なくとも1つの開口部が設けられた少なくとも1つの壁を有するチューブ状導波路(200;400)の形態を採用することを特徴とする。本発明はさらに、保護、カウントまたはそのような検知装置(1)に装備された開放部を閉鎖する設備に関する。 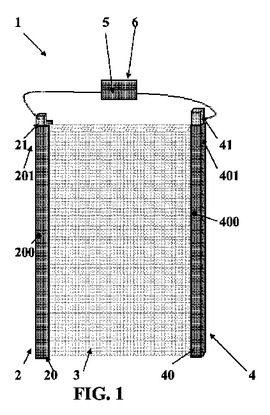 (もっと読む)
(もっと読む)
221 - 240 / 541
[ Back to top ]