
Fターム[5J070AH39]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829)
Fターム[5J070AH39]の下位に属するFターム
Fターム[5J070AH39]に分類される特許
141 - 160 / 541
信号処理装置、レーダ装置及び信号処理プログラム
【課題】サイドローブによる偽像を抑圧することができる信号処理装置を提供する。
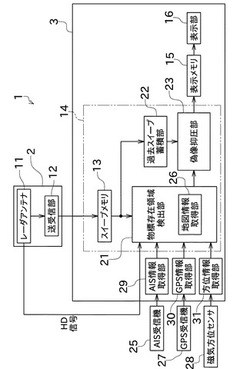
【解決手段】レーダ指示機3は、物標存在領域検出部21と、過去スイープ蓄積部22と、偽像抑圧部23と、を備えている。物標存在領域検出部21は、物標が存在する領域を検出する。過去スイープ蓄積部22は、方位方向に連続したレーダエコーを取得可能である。偽像抑圧部23は、方位方向に連続したレーダエコーから得られる情報に基づいて、前記レーダエコーに含まれる偽像を抑圧する処理を行うことが可能である。そして、偽像抑圧部23は、物標が存在する領域のレーダエコーに対しては、それ以外の領域のレーダエコーに対する処理とは異なる処理を行っている。
(もっと読む)
レーダー信号を検出するための方法

【課題】レーダー信号を検出するための方法を提供する。
【解決手段】本発明によるレーダー信号の検出方法は、あらかじめ定めた基準時間または基準パルス収集個数に基づいて、複数のパルスを収集する段階(S100)と、複数のパルスをパルス幅に基づいて、類似パルス別にグループ化する段階(S300)と、全体グループをショートパルスタイプまたはロングパルスタイプ別に分類し、タイプ別グループ数を判断する段階と(S600)、タイプ別グループ数に基づいて、レーダー信号の存否を判断する段階(S700)と、を含みうる。
(もっと読む)
インパルス信号およびインパルス信号列の検出装置並びに方法
【課題】多重経路環境で実時間無線位置認識システムの応用のためのインパルス信号およびインパルス信号列の検出装置および方法を提供する。
【解決手段】多重経路環境で実時間無線位置認識システムの応用のためにインパルス信号またはインパルス信号列を検出するインパルス信号検出装置は、受信アンテナを介して受信された極超短のインパルス信号から不要な周波数帯域を除去する帯域通過フィルターと、前記不要な周波数帯域が除去された多重経路によるインパルス信号列の包絡線を検出し、前記包絡線の立ち上がりエッジに基づいて前記包絡線に対するデジタル信号を出力するRF/アナログ部と、低速1ビットサンプリングで動作してデータを出力し、フレーム同期を探し或いはレージング遂行命令が検出されると、高速1ビットサンプリングを行ってインパルス信号の伝播時間を計算して出力する信号処理ベースバンド部とを含む。
(もっと読む)
障害物検出装置
【課題】障害物検出装置において、波動を用いる方法のみで障害物を適切に検出できるようにすることである。
【解決手段】車両に搭載される障害物検出装置20は、従来から車両搭載用障害物検知用として用いられているFM−CWレーダを基本構成とし、制御部50の1次判断モジュール52において対象物の有無を判断する。対象物が有ると判断されると受信波の受信パワーを予め定めた制御周期で取得して受信パワー時系列データとし、これを対象物の路上からの高さに依存する波動の位相干渉に基づいて予め設定された閾値範囲パターンと比較して、対象物が路上障害物が否かの判断を2次判断モジュール54において行う。
(もっと読む)
電子走査型レーダ装置及びコンピュータプログラム
【課題】上方構造物の検知を判別する電子走査型レーダ装置を提供する。
【解決手段】送信波を送信する送信アンテナ3と、送信波が対象物に反射した受信波を受信する受信アンテナ11から1nと、受信波の強度を算出する受信強度算出部22と、受信波に基づいて前記対象物までの距離を検出する距離検出部24と、距離が狭まるに連れて前記受信波の強度が減少する場合、前記対象物を上方構造物と判定する上方構造物判別処理部28とを有する。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
マイクロ波イメージングシステム
【課題】超短パルスの反射波信号における物体表面での反射波成分を除去し、マスキングされていた検出対象物からの反射波成分を確実に取得して、物体内の検出対象物の状況を適切に画像化して評価可能とするマイクロ波イメージングシステムを提供する。
【解決手段】超短パルスの周波数帯域内に、検出対象物からの反射波成分が物体内を十分透過できる第一の周波数範囲と、同じ反射波成分でも透過性が低下する第二の周波数範囲を設定し、各周波数範囲に対応する反射波の各信号成分を取得して、第一の周波数範囲に対応する第一の信号成分から、第二の周波数範囲に対応する第二の信号成分を差引き、物体表面での反射波成分を打消すことから、効率よく物体表面での反射波成分を取除いて、第一の信号成分での検出対象物からの反射波成分を相対的に強調でき、画像再構成で検出対象物の画像化を精度よく実行可能となり、得られた画像から検出対象物を適切に検出できる。
(もっと読む)
単一アンテナFM/CW船用レーダ
【課題】運河などの非常に限定された空間で使用されることになる新規に規定された、はしけ/河川レーダなどの用途で使用するための高解像度、低出力船用レーダを提供する。
【解決手段】レーダシステム20は、単一スロット導波管アンテナと、アンテナと信号通信するサーキュレータと、送信機および前記アンテナへのインターフェースとなる前記サーキュレータの出力部に直接接続された受信機ミキサと、送信機信号のサンプルを使用して局部発振器信号を供給するように構成された構成要素と、前記局部発振器信号の到着時を漏洩または反射電力信号の少なくとも一方に関連した信号の到着時と一致させ、それによって前記受信機ミキサで位相雑音キャンセルを行うように構成された構成要素を含む、前記アンテナと信号通信する送受信機とを含む。非常に低い送信機出力を使用し、約90センチメートルの特別に短い感知距離を有するFM/CWレーダを含む。
(もっと読む)
レーダ装置
【課題】相関処理をするときに生じるノイズの影響を低減できるレーダ装置を低コストで提供する。
【解決手段】符号化された信号を送信し、当該信号が対象物で反射した反射信号を受信し、信号を符号化するときの符号と同一の符号を比較符号として記憶する記憶し、符号と同一の比較符号と、反射信号から復号した符号とのいずれか一方の連続する複数の符号と、いずれか他方の符号との相関がピークを生じるタイミングに基づいて対象物を測定する。
(もっと読む)
レーダ装置
【課題】近距離探知と遠距離探知とを実現可能であり、かつ、装置全体の小型化、簡単化及び低コスト化を実現することが可能なレーダ装置を提供する。
【解決手段】レーダ装置が近距離探知を行う場合には、信号処理装置10からの制御信号に従い、近距離探知時の受信信号を前段受信処理部51の低利得回路を介して後段受信処理部52へ導出する。また、レーダ装置が遠距離探知を行う場合には、信号処理装置10からの制御信号に従い、遠距離探知時の受信信号を前段受信処理部51の高利得回路を介して後段受信処理部52へ導出する。
(もっと読む)
無線センサ装置
【課題】複数のアンテナ間で互いの無線波が干渉することなくアンテナ間のアイソレーションを確保することができ、装置の小型化が図れると共に、発振器に要求されるピークパワーを半減できること。
【解決手段】無線センサ装置10は、アンテナA11,A12に信号発生回路11で生成されるパルス信号を給電して無線波を放射する場合、先のパルス信号がアンテナA11に給電されると同時にミキサ回路15aへ供給された後、当該アンテナA11及びミキサ回路15aに与えた先のパルス信号のパルス幅と重複しない近接タイミングで次のパルス信号がアンテナA12に給電されると同時にミキサ回路15bへ供給されるように、信号発生回路11の動作タイミング及び当該信号発生回路11からアンテナA11,A12までの経路を制御するものである。
(もっと読む)
デジタル制御されたUWBミリメートル波レーダー
超広帯域(UWB)ミリメートル(ミリ)波レーダーシステム(100)が、制御入力(106)、GHz信号出力、および周波数制御された出力(108)を有する信号源(105)を含む。制御ループ(146)が、GHz信号出力と制御入力との間に結合され、周波数分割器(110)と、デジタル制御されたPLL(115)とを含み、PLL(115)は、信号源の制御入力に結合されたロックされた出力を提供して、離散周波数掃引された、または離散周波数ホップされた、周波数ロックされた出力信号(119)を提供する。周波数乗算器(127)が、複数のミリ波周波数を出力するために、信号源の周波数制御された出力に結合される。アンテナ(134)が、ミリ波周波数を、応答信号を送られることになる表面(151)に送信し、そこから反射ミリ波信号を受信する。混合器(140)が、反射ミリ波信号とミリ波周波数とを混合し、処理回路(165)が、混合出力から、表面に関連した少なくとも1つのパラメータを判定する。 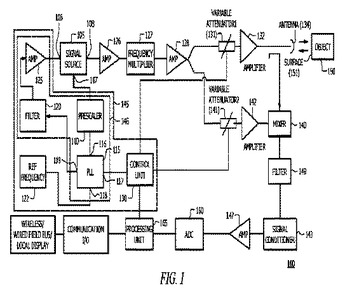 (もっと読む)
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
ディテクタシステム
【解決手段】ディテクタシステムは、振幅変調(「AM」)ノイズを有する第1高周波信号を検出し、少なくとも第1検出AMノイズ信号成分および復調信号成分を有する第1検出信号を生成するよう構成された第1ディテクタと、AMノイズを有する第2高周波信号を検出し、少なくとも第2検出AMノイズ信号成分を有する第2検出信号を生成するよう構成された第2ディテクタと、を備える。代数的合成ネットワークは、第1検出信号と第2検出信号とを合成することで第1検出AMノイズ信号成分を第2検出AMノイズ信号成分で相殺し、復調信号成分を含む出力信号を生成する。 (もっと読む)
位相情報を用いたサブミリ波レーダー
サブミリ波長アクティブレーダーシステム(10、20、30)のための信号処理装置(30)は、レーダーシステムによって受信されダウンコンバートされた信号を処理する。このダウンコンバート信号は、時変振幅とコンテンツに依存する周期的成分を有する位相成分とを有する視野中の所定のピクセルに対応する。コンテンツに関する情報は、周期的成分から識別される。振幅のみよりも位相を使用することによって、ダウンコンバート信号中に追加の情報が存在する。位相は、振幅のみよりも、オブジェクト、バックグラウンド及び大気条件のような、コンテンツ中の変化により敏感である。位相情報は、周期的成分が保持されることを可能とする。この周期的成分は、コンテンツフラター、サブミリ波定常波における変化、および、もし表面層が複数の半波長の厚さを有している場合、サブミリ波放射の受信された反射中における干渉縞に原因して、コンテンツに特有であり得る。 (もっと読む)
パルスレーダ装置
【課題】近距離と遠距離の両方の目標物体を1度のパルス送信で、短時間で、かつ良好なSN比で計測することができ、また、回路内の不要結合があってもADコンバータのダイナミックレンジを大きくする必要がない低価格なパルスレーダ装置を提供する。
【解決手段】1種類の送信パルス幅を用い、目標物体にパルス波を送信している間は受信信号を遮断するように動作する。これにより近距離の目標物体からの反射信号は前記受信信号の遮断動作によってパルスの一部が除去されてパルス幅が短くなるが、このパルス幅の短縮に対してはフィルタの帯域幅を変化させることで高いSN比を保つようにする。
(もっと読む)
センサバイアス推定装置
【課題】バイアスベクトル推定値を高精度に算出可能なセンサバイアス推定装置を得る。
【解決手段】それぞれのセンサが、観測値と予測値とに基づいて相関観測値を算出するとともに、相関観測値に基づいてセンサ航跡を算出し、算出結果を出力する装置に適用され、複数のセンサ10、20のバイアスを推定するセンサバイアス推定装置であって、センサ航跡に基づいて、時刻同期および航跡相関を実行し、同一航跡と判定されたセンサ航跡の組を出力する同期処理部30と、同一航跡と判定されたセンサ航跡の組に対してバイアス格子点探索処理を実行し、バイアス推定値を算出するバイアス格子点探索処理部40と、相関観測値に基づいて、バイアス推定フィルタ処理を実行し、バイアスベクトル推定値を算出するバイアス推定フィルタ処理部60とを備え、バイアス推定フィルタ処理部60は、バイアス推定値をバイアスベクトル推定値の初期値として設定するものである。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
気象レーダシステムとその降水強度算出方法及びプログラム
【課題】高分解能かつ高精度な降水強度の算出を可能とする。
【解決手段】水平偏波と垂直偏波のレーダ波を送信し、その反射波を受信する送受信装置11〜16と、その受信信号から偏波毎の受信電力を算出する信号処理装置17とを備える気象レーダシステムにおいて、データ変換装置19は、受信電力をもとに高分解能でレーダ反射因子(Z)を算出し、受信電力の偏波間位相差(φDP)をもとに低分解能で比偏波間位相差(KDP)を算出し、比偏波間位相差(KDP)をもとに低分解能領域毎の平均降水強度(Rave)を算出し、レーダ反射因子(Z)と降水強度(R)との関係式(Z=B×Rβ:B,βは定数)における第1定数(B)を、レーダ反射因子(Z)をもとに算出し、第1定数(B)、平均降水強度(Rave)及びレーダ反射因子(Z)をもとに第2定数(β)を推定し、上記関係式に基づいて、第1空間分解能の降水強度(R)を算出する。
(もっと読む)
信号処理装置、レーダ装置、車両制御システム、信号処理方法、および、プログラム
【課題】物体情報を正確に検出できるレーダ装置を提供する。
【解決手段】過去の物体検出処理において検出された物体情報の周波数を整数倍した周波数に基づいて、所定周波数範囲を設定して、アップ区間とダウン区間のそれぞれでピーク信号が所定周波数範囲内にある場合に、ピーク信号を特定ピーク信号として設定する。そして、アップ区間とダウン区間との特定ピーク信号同士をペアリングする。これにより、物体情報を正確に検出できる。
(もっと読む)
141 - 160 / 541
[ Back to top ]