
Fターム[5J070AH39]の内容
レーダ方式及びその細部 (42,132) | 信号検出及び処理 (6,830) | フィルタ手段 (829)
Fターム[5J070AH39]の下位に属するFターム
Fターム[5J070AH39]に分類される特許
61 - 80 / 541
侵入検知装置、侵入検知方法および侵入検知プログラム
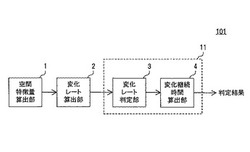
【課題】人間の動作を高精度に検知することが可能な侵入検知装置、侵入検知方法および侵入検知プログラムを提供する。
【解決手段】侵入検知装置101は、所定エリアの状態を示す空間特徴量を算出するための空間特徴量算出部1と、空間特徴量算出部1によって算出された空間特徴量の時間的変化を算出するための変化レート算出部2と、変化レート算出部2によって算出された時間的変化に基づいて、所定エリアにおける人間の動作を検知するための検知部11とを備える。
(もっと読む)
レーダ装置

【課題】距離分解能以内に複数のターゲットが存在し、各ターゲットからの反射波の信号のドップラ周波数が同程度でも、各ターゲットの方向推定精度を向上する。
【解決手段】レーダ送信部は、所定符号長のパルス圧縮符号を高周波送信信号に変換して送信アンテナから送信する。レーダ受信部は、複数の受信アンテナ毎にアンテナ系統処理部を有する。アンテナ系統処理部は、パルス圧縮符号におけるパルス送信レートの2倍のサンプリングレートで、受信信号をデジタルデータに変換し、奇数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第1相関値を演算し、偶数のサンプルタイミングに応じて変換されたデータとパルス圧縮符号との第2相関値を演算する。レーダ受信部は、各第1相関値及び第2相関値に基づいて、高周波送信信号の距離分解能以内にターゲットが複数存在すると、各ターゲットを分離して検出する高分解能処理部を備える。
(もっと読む)
スクラップ表面プロファイル計測方法
【課題】容器内に積層されたスクラップ表面までの距離を適正に計測して容器内のスクラップの表面プロファイルを高精度に計測することができるスクラップ表面プロファイル計測方法を提供すること。
【解決手段】電磁波距離計測部11は、容器2内のスクラップ21表面上に、容器2内のスクラップ21のうちの大きいスクラップ21のサイズと同程度またはそれ以下の大きさのスポットが照射されるように調整されたビーム幅の電磁波をアンテナ111から送信し、アンテナ111によってその反射波を受信することで容器2内のスクラップ21表面までの距離を計測する。
(もっと読む)
距離測定装置および距離補正手段
【課題】第1の発受信手段と第2の発受信手段との間で、単一の無線周波数を用いて、時分割で相互間の通信を行い、相互間の距離を高精度で測定できる距離測定装置および距離補正手段を安価に実現する。
【解決手段】第1の発受信手段から少なくとも起点信号を含む無線信号を間欠発信し、第2の発受信手段で前記無線信号を受信すると、受信した無線信号から前記起点信号を復調しするとともに、伝達位相誤差もしくは伝達遅延誤差を検出して補正し、前記補正した起点信号と同期した距離測定信号を含む無線信号を時分割のタイミングで折返し発信し、前記第1の発受信手段において、前記第2の発受信手段から受信した距離測定信号を復調するとともに、伝達位相誤差もしくは伝達遅延誤差を検出して補正し、自局で生成した起点信号を基準として前記補正した距離測定信号の伝達位相もしくは伝達遅延を測定して、相互間の距離を高精度で算出する。
(もっと読む)
放射器に対する機械構成部品の近接度を測定するセンサアセンブリおよび方法
【課題】機械構成品の近接度を測定するアセンブリおよび方法の提供。
【解決手段】マイクロ波センサアセンブリ110は、少なくとも1つのマイクロ波信号から電磁場を生成するように構成された放射器206を含む少なくとも1つのプローブ202を含む。また、この放射器は、電磁場内に位置している物体によって放射器内に誘導された負荷を表す少なくとも1つの負荷信号を生成するように構成されている。さらに、マイクロ波センサアセンブリは、少なくとも1つのプローブに結合された信号処理デバイス200を含む。この信号処理デバイスは、少なくとも1つの負荷信号に基づいて実質的に線形の出力信号を生成するように構成されたリニアライザ222を含む。
(もっと読む)
自動車用レーダシステムおよびその使用方法
【課題】標的ゾーン46内の物体34,36の存在を示すための検出信号を生じる。
【解決手段】車両用レーダシステム44は送信部56および受信部58を備え、送信部56が、標的ゾーン46に無線信号を出力するための単一ビームアンテナ72を含む。受信部58は直接受信信号78および間接受信信号80を受信するための単一ビームアンテナ76を含む。受信信号78、80は、標的ゾーン46内の物体34、36から無線信号の反射である。間接受信信号80は物体34、36から車両42の反射パネル54に反射され、受信アンテナ76で受信するために間接受信信号80は反射パネルに反射される。標的ゾーン46内の物体34、36の存在を指示する検出信号を生じるために受信信号78、80は合算される。
(もっと読む)
レーダ装置
【課題】クラッタ抑圧性能と目標信号保存性能を両立させる。
【解決手段】送受信アンテナを有する送受信回路1と、送受信回路1から入力される受信信号を入力して、その中のクラッタを抑圧する複数のFIRフィルタ2と、各FIRフィルタ2の出力信号をフーリエ変換する複数のFFT手段3と、FFT手段3の出力の中から、目標信号検出に使用するFFT出力結果を選択するFFT出力選択手段4と、FFT出力選択手段4の出力結果を用いて目標信号を検出する複数の目標検出手段5と、目標検出結果を表示する表示手段6と、FFT出力選択手段4でFFT出力結果を選択するために用いる切替周波数を記憶する切替周波数データベース7とを備え、FIRフィルタ2の振幅特性は全て互いに異なる。FFT出力選択手段4は、振幅利得の最も高いFIRフィルタ2の出力を用いるようにFFT手段3の出力を切り替える。
(もっと読む)
レーダ装置
【課題】昇順および降順周波数シーケンスを用いて送受信された信号同士の複素乗算結果から2次元フーリエ変換を用いて目標相対速度を計測可能なレーダ装置を得る。
【解決手段】目標相対速度情報取得手段11と、送信波形諸元を生成する送信波形制御器1と、任意周波数発振器2と、90度ハイブリッド器7と、送信機3と、送信機3からの信号を目標に照射して反射された信号を受信するアンテナ4と、分配器5と、位相検波器6a、6bと、低域通過フィルタ8a、8bと、A/D変換器9a、9bと、ビデオ信号記憶手段10と、目標相対速度Vdを用いて信号を補正する相対速度補正処理器12と、合成帯域処理器13と、目標距離Rを計測する目標検出処理器14とを備える。
(もっと読む)
速度計測装置
【課題】路面に対する移動体の速度を正確に計測する。
【解決手段】速度計測装置は、路面形状データを取得する路面形状センサ11と、路面形状データを格納するメモリ12と、メモリ12に格納された路面形状データに基づいて、車両10の速度を計算する演算装置13とを備える。路面形状センサ11は、路面に電波を放射し、路面形状センサ11からの距離が異なる路面上の複数の構造物によって反射された各反射波の信号レベルと、路面形状センサ11から各構造物までの伝搬距離とを測定することで、路面形状データを取得する。演算装置13は、各路面形状データの伝搬距離を、路面に射影した水平距離に変換し、類似する路面形状データが取得されるときの路面形状データとの水平距離の差を決定し、水平距離の差を測定時間の差で除算して移動体の速度を計算する。
(もっと読む)
レーダ装置及び物標検出方法
【課題】アンテナを回転して送信ビームを放射するレーダ装置及び物標検出方法において、各方位における送受信に要する時間を長くすることなく、クラッタなどからの物標の受信信号成分の分離を行ない易くすることである。
【解決手段】アンテナ20は、回転軸24の周りを回転しつつ各方位において、1パルスの送信ビーム25を放射して反射体からの反射エコーを受信する。仰俯角方向走査部30は、1パルスの送信ビーム25を、仰俯角に応じて周波数が異なるように、方位毎に仰俯角方向に走査する。受信部60は、周波数成分検出部62によって、アンテナ20で受信した受信信号の周波数成分から反射体の仰俯角を検出する。同時に、受信部60は、振幅成分検出部61によって、受信信号の時間成分から反射体の距離を検出する。
(もっと読む)
ドップラーセンサ及び該ドップラーセンサを用いた照明装置
【課題】干渉を発生させにくいドップラーセンサ及び該ドップラーセンサを用いた照明装置を提供する。
【解決手段】所定の検出範囲に電波を送信するとともに、検出範囲からの電波を受信し、送信に用いた送信信号と受信により得られた受信信号とからドップラー信号を生成して出力する送受信部3と、ドップラー信号を用いて検出範囲内における人体の有無を判定する人体判定部4と、他のドップラーセンサのような外部の発生源からの周期的な電波による上記ドップラー信号への影響の有無を判定する影響判定部5とを備える。送受信部3は、通常は電波の送信を間欠的とし、影響判定部5によって影響があると判定されると電波の送信を連続的とする。送受信部3が電波の送信を連続的としている期間には、より低い周波数を用いるような他のドップラーセンサとの間での干渉の発生が避けられる。
(もっと読む)
超広帯域パルス・センサ
【課題】外部の干渉波の影響を除去でき、目標物までの距離検出精度の高いUWBパルス・センサの提供。
【解決手段】探知波生成部15は、周波数fmin〜fmaxを間隔Δfで等分した全周波数点集合から使用周波数点集合を含む周波数点を離散周波数点系列に従って並べ、探知波を順次発振する。探知波が目標物で反射された反射波は、受信後、位相検波器10で位相検波され周波数点に対する位相点系列が生成される。欠落補償部11は、各位相点に対応する周波数点の昇順又は降順で並べ替え、欠落した周波数点に対応する位相点を補間し、補間された位相点系列を算出する。逆離散フーリエ変換部12は、補間された位相点系列を逆離散フーリエ変換しレンジ・スペクトルを生成し、レンジ・スペクトルのピークの位相値からアンテナから目標物までの距離を算出する。
(もっと読む)
レーダ装置
【課題】自レーダユニットの受信信号レベルに対する他レーダユニットからの干渉信号レベルを効果的に抑圧し、当該抑圧に必要な測定時間及び付加回路の増大を回避する。
【解決手段】第1レーダ送信部は、第1送信トリガ信号生成部が所定の同期確立信号の受信時から第1遅延時間経過後に生成された第1送信トリガ信号に基づいて、第1送信符号制御部の制御の下で、第1レーダ送信信号を第1送信周期で周期的に送信する。第2レーダ送信部は、第2送信トリガ信号生成部が当該同期確立信号の受信時から第2遅延時間経過後に生成された第2送信トリガ信号に基づいて、第2送信符号制御部の制御の下で、第2レーダ送信信号を第2送信周期で周期的に送信する。第1遅延時間及び第2遅延時間に応じて、第1レーダ送信部及び第2レーダ送信部からの各干渉信号の到来時が第2レーダ送信信号及び第1レーダ送信信号の各送信区間内となる。
(もっと読む)
レーダ装置
【課題】従来の信号処理方法においては、アップ周波数とダウン周波数のペアを決定するペアリングが困難となる場合がある。
【解決手段】本発明のレーダ装置は、送信した電波が複数の目標物で反射された反射波を受信して受信信号を生成し、該受信信号から複数のアップ周波数ピークと複数のダウン周波数ピークとを検出すると共に、アップ周波数ピーク及びダウン周波数ピークにおける目標物に関する特性値を測定し、複数のアップ周波数ピークの各々と複数のダウン周波数ピークをそれぞれ1つずつ組み合わせ、各々の組み合わせについて、測定された特性値に基づいてマハラノビス距離を算出し、マハラノビス距離が所定のしきい値以下の組み合わせをペアリング候補として決定し、該決定したアップ周波数ピークとダウン周波数ピークに基づき、目標物の距離、相対速度及び角度の少なくとも1つを含む今回のデータを算出することを特徴とする。
(もっと読む)
レーダ装置
【課題】PRIを変えることなく、目標相対速度および所望のクラッタ抑圧性能に応じて、送信波形諸元を適応的に変化させるレーダ装置を得る。
【解決手段】目標相対速度情報取得手段1と、パルス繰返し周期を変えることなく、目標相対速度Vdに対するクラッタ抑圧処理損失を低減するための送信波形諸元を生成する送信波形制御器2と、任意周波数発振器3と、90度ハイブリッド器8と、送信機4と、送信機からの信号を目標に照射して反射された信号を受信するアンテナ5と、分配器6と、位相検波器7a、7bと、低域通過フィルタ9a、9bと、A/D変換器10a、10bと、ビデオ信号記憶手段11と、MTI処理器12と、目標相対速度Vdを用い、クラッタ抑圧処理された信号を補正する相対速度補正処理器13と、合成帯域処理器14と、目標距離Rを計測する目標検出処理器15とを備える。
(もっと読む)
ピーク検出閾値の設定方法、物標情報生成装置、プログラム
【課題】 回り込みノイズの影響が考慮された精度の良い物標検出を可能とするピーク検出閾値の設定方法、物標情報生成装置、プログラムを提供する。
【解決手段】 ピーク検出閾値の上位領域は、ピーク周波数成分が発生しないCWノイズ分布の上位領域を用いて設定し、ピーク検出閾値の下位領域は、受信ノイズ分布の下位領域から推定して設定する。具体的には、上位領域では、回り込みノイズを含んだ受信ノイズの分布を示すCWノイズ分布の平均値に、ランダムノイズのバラツキ幅より大きな値に設定されたオフセット値を加えた第1分布を、下位領域では、受信ノイズ分布に1/fノイズ分布を加えることで回り込みノイズを含んだ受信ノイズ分布の波形を推定し、更に、境界周波数にて上位分布と連続するようにレベル調整をすることで、回り込みノイズとオフセット値の分を底上げした第2分布をピーク検出閾値とする。
(もっと読む)
無線通信装置および制御プログラム
【課題】 物品の探索や存否の確認を容易かつ迅速に行うことを可能とする。
【解決手段】 一態様における携帯電話1は、送信手段、受信手段、検出手段、選択手段、登録手段、指定手段、報知手段を備える。送信手段はRFIDタグ2に問合せ信号を無線送信し、受信手段はRFIDタグ2から無線送信される応答信号を受信し、検出手段はこの応答信号の強度を検出する。選択手段は登録処理及び探索処理を選択する。登録手段は登録処理の選択時に受信手段で受信される応答信号で識別されるRFIDタグ2を記憶手段に登録する。指定手段は探索処理の選択時に記憶手段に登録されたRFIDタグ2の中から探索対象の指定を受け付け、報知手段は探索対象のRFIDタグ2からの応答信号の強度が検出手段で検出されると、その検出された強度等に応じて当該探索対象のRFIDタグ2までの距離を報知する。
(もっと読む)
レーダ装置、車両制御システム、信号処理装置、及び、物体検出方法
【課題】物体の位置を正確に検出する技術を提供する。
【解決手段】ビート信号に基づいて、ビート信号に含まれる波の周波数及び信号レベルを示すピーク信号を導出する。そして、ピーク信号の下端となる第1周波数と上端となる第2周波数との間を互いに異なる補正率が設定された複数のパートに区分し、複数のパートのうちピーク信号が属するパートの補正率でピーク信号を補正し、補正されたピーク信号に基づいて、物体の位置を検出する。また、ピーク信号の第1周波数及び第2周波数の近傍においては、第1周波数及び第2周波数の中央の近傍よりも、一つのパートとする周波数の幅を狭くする。これにより、第1周波数及び第2周波数近傍のピーク信号の補正を細分化して行うことができ、物体の位置を正確に検出できる。
(もっと読む)
近接センサ
【課題】感度を安定させ、静電気などによる外乱による計測値のエラーを回避することを可能とする近接センサを提供する。
【解決手段】近接センサ1aは、発振器2と、発振器2の信号に基づいて交流信号Eaを放射する送信アンテナ3と、交流信号Ebを受信する受信アンテナ4とを備える。また、近接センサ1aは、近接センサ1aは、被検査領域からの交流信号Ebを受信する受信アンテナ4と、送信アンテナ3と受信アンテナ4を電気的に接続する抵抗7を備える。抵抗7により、発振器2からの信号は移相される。さらに、近接センサ1aは、受信アンテナ4の出力を増幅する増幅器8と、発振器2の出力信号で、受信アンテナ4で受信した信号を位相検波する位相検波器9を備える。さらに、近接センサ1aは、位相検波器9の出力を平滑化するLPF(ローパスフィルタ)10と、出力端子11を備える。
(もっと読む)
電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラム
【課題】設定した次数内における適切な信号受信波数の設定を行い、精度の良い方位検出ができる電子走査型レーダ装置、受信波方向推定方法及び受信波方向推定プログラムを提供する。
【解決手段】周波数分解処理部がビート信号を予め設定された周波数帯域幅を有するビート周波数に周波数分解して、ビート周波数毎に分解されたビート信号に基づいた複素数データを算出する。方位検出部がビート信号に基づいて算出された複素数データを要素とする正規方程式の構成部である行列の固有値に基づいて受信波の波数を推定し、該推定された波数に応じた数の固有値と固有ベクトルに基づいて作成される信号部分空間の正規方程式の解として算出される係数を作成し、該作成された係数に基づいて受信波の到来方向を算出する。
(もっと読む)
61 - 80 / 541
[ Back to top ]