
Fターム[5J070BB01]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468)
Fターム[5J070BB01]の下位に属するFターム
Fターム[5J070BB01]に分類される特許
21 - 40 / 91
レーダ装置
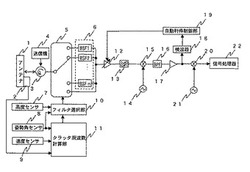
【課題】 従来のレーダ装置は、目標とクラッタをドップラ周波数で分離し、狭帯域フィルタを通過した目標の電力で利得制御を行っていたため、電力が大きいクラッタを受信した時に、受信系が飽和するという問題があった。
【解決手段】 受信系の初段に阻止帯域の異なる複数のノッチフィルタを備え、外部に備えた速度センサ及び姿勢角センサからの情報をもとにクラッタ周波数を計算し、適合する阻止帯域のノッチフィルタを選択する。選択したノッチフィルタは、受信した目標信号のみ通過させ、クラッタを減衰させる。これにより、クラッタにより受信系が飽和する問題を解消する。なお、受信系の初段にフィルタを配置すると、NFが劣化し、低S/Nの目標の検出が困難になる問題があるため、高度が低くクラッタ電力が大きい時のみ、ノッチフィルタを通過させるよう、切換えを行う。
(もっと読む)
目標検出装置及び目標検出方法

【課題】目標検出の誤警報の低減を図り得るレーダ装置の目標検出装置を提供する。
【解決手段】目標検出部において、事前に受信ビデオ信号からクラッタの分布を形状パラメータ及びスレッショルド算出処理部162にて推定し、さらに擬似的な目標を示すテストセルを含めた形状ペラメータに対応するスレッショルドをレーダの1スキャンごとにスレッショルドメモリ163に記憶しておき、検出判定部165により、このスレッショルドメモリ163に記憶されたスレッショルドを利用して、ワイブルCFAR処理部164による処理から目標を検出するようにしている。
(もっと読む)
追尾装置、追尾方法、及びコンピュータプログラム
【課題】飛翔体のトランスポンダーから送信されてきた応答信号を受信し、その電波強度を基に、アンテナ角を飛翔体に追尾させる追尾装置で、サンプリングレートを高速化させることなく、高精度追尾が可能にする。
【解決手段】制御装置21の座標演算器22で現時刻の飛翔体の位置座標を算出し、位置推定器23で次時刻の飛翔体の位置座標を推定し、角度算出器24で次時刻のアンテナの角度の推定値を算出している。そして、推定された次時刻でのアンテナの角度を目標値として、アンテナ31の向きを制御している。このように、本発明の第1の実施形態では、次時刻でのアンテナの角度の推定値を目標値として、アンテナ31の向きを制御しているため、サンプリングレートを高速化させることなく、高精度追尾が可能になる。
(もっと読む)
レーダ装置
【課題】
レーダ主画面上の指定目標物に対する高分解能レーダ画像を随時確認することを可能にする。
【解決手段】
送信波を放射する送信部と、送信波を放射する送信部と、複数個のアンテナおよび受信機から構成され、前述送信波が目標物から反射した到来波を受信する受信部と、それぞれの受信機に対応してA/Dサンプリングを行うAD部と、画像処理によって自動的に追尾機能を実行し、到来方向推定の実施領域を決定する特定領域決定部と、到来方向推定を行うための評価関数(例えば、MUSICスペクトラム)を計算する到来方向推定部と、全方位のレーダ画像を表示する主画面表示部と、自動的に決定された特定領域の高分解能処理結果を表示する副画面表示部を具備する。
(もっと読む)
車両検知装置および車両検知システム
【課題】レーダにより検知された車両が走行している車線を判別する。
【解決手段】車両検知装置は、複数の車線の各々に設置され、設置車線に隣接する車線を検知範囲に含むレーダからの情報を用いて車両を検知する。車両検知装置は、取得部、観測レーダ特定部、および、判定部を備える。取得部は、各レーダから、検知された対象物と対象物を検知したレーダの間の距離を表す検知距離、および、対象物の検知時刻を取得する。観測レーダ特定部は、第1のレーダにより検知された第1の対象物の検知距離と、第1のレーダの設置車線に隣接する車線に設置されている第2のレーダにより検出された第2の対象物の検知距離のうち、最も短い距離を観測した距離観測レーダを特定する。判定部は、第1の対象物と第2の対象物の間の距離が第1の閾値以下の場合に、距離観測レーダが設置されている車線を車両が走行していると判定する。
(もっと読む)
拡張現実におけるオブジェクトの追跡
一般的に、オブジェクトを追跡するための技術が説明される。いくつかの実施例では、システムは、モバイルフォンおよび拡張現実デバイスを備えてよい。モバイルフォンは、送信波を受信し、オブジェクトから反射された反射波を受信するのに有効である。モバイルフォンは、送信波と反射波との間の差異を判定し、判定された差異に基づいて第1の追跡データを生成するように構成され得る。拡張現実デバイスは、第1の追跡データを受信し、第1の追跡データに基づいてオブジェクトの位置に関する第2の追跡データを判定するように適応され得る。判定された第1の追跡データおよび第2の追跡データに基づいてディスプレイ上で画像が生成され得る。 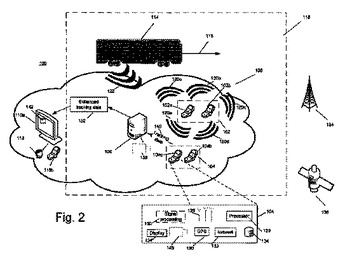 (もっと読む)
(もっと読む)
レーダ装置
【課題】測角精度を向上できるレーダ装置を提供する。
【解決手段】複数の素子を有し、複数の素子が順番に複数の第1素子12aと第2素子11aと第3素子11a´と複数の第4素子12a´とに分割されたアンテナ10と、観測角度範囲全体を第2素子と第3素子とで覆うビームを形成し、所定角度を中心とする所定範囲を複数の第1素子と複数の第4素子とで覆うビームを形成し、複数の素子全体で所定角度を中心とする所定範囲内の任意の方向にビームを形成するビーム成形部34と、ビーム成形部で形成されたビームに基づきモノパルス測角を行う測角部37とを備える。
(もっと読む)
目標追尾装置及びコンピュータプログラム及び目標追尾方法
【課題】比較的狭い範囲内に複数のピーク画素がある場合でも、少ない計算量で精度の高い相関処理をする。
【解決手段】ピーク画素抽出部132は、目標画素のなかから、隣接する画素よりも画素値が大きい画素(ピーク画素)を抽出する。特徴位置算出部133は、目標の特徴を表わす特徴点の位置(特徴位置)を算出する。特徴距離算出部134は、ピーク画素の位置と特徴位置との間の距離(特徴距離)を算出する。特徴方位算出部135は、ピーク画素の位置から見た上記特徴位置の方位(特徴方位)を算出する。相関処理部140は、特徴距離と特徴方位とを含む相関パラメータに基づいて、相関処理をする。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】 追尾性能を向上させたレーダ装置及びレーダ信号処理方法を提供する。
【解決手段】 アンテナ部20は、レーダ信号の送信及び受信を行なう。目標検出部40は、アンテナ部20が受信した受信信号に基づいて、所定の捜索領域を捜索して目標を検出する。追尾処理部50は、目標検出部40が検出した目標を追尾するための追尾処理を行う。レーダ制御部10は、目標検出部40による捜索領域の捜索を制御する。レーダ制御部10は、捜索領域を方位方向に複数の領域に分割し、複数の領域のそれぞれを更に距離方向に分割して、隣り合う分割領域の一部が重複するように複数の分割領域を生成し、同一の方位について、分割領域間の捜索に時間差が生じるように、捜索順序を設定する。
(もっと読む)
信号処理装置、レーダ装置及び信号処理プログラム
【課題】サイドローブによる偽像を抑圧することができる信号処理装置を提供する。
【解決手段】レーダ指示機3は、物標存在領域検出部21と、過去スイープ蓄積部22と、偽像抑圧部23と、を備えている。物標存在領域検出部21は、物標が存在する領域を検出する。過去スイープ蓄積部22は、方位方向に連続したレーダエコーを取得可能である。偽像抑圧部23は、方位方向に連続したレーダエコーから得られる情報に基づいて、前記レーダエコーに含まれる偽像を抑圧する処理を行うことが可能である。そして、偽像抑圧部23は、物標が存在する領域のレーダエコーに対しては、それ以外の領域のレーダエコーに対する処理とは異なる処理を行っている。
(もっと読む)
目標相関処理装置、目標相関処理方法及びプログラム
【課題】地上目標物に適した目標相関処理装置を提供する。
【解決手段】目標物センシング情報が示す目標物の位置、速度、加速度、移動方向と、当該移動方向を中心とする予測角度範囲内の最も進行難度の低い移動方向のうちの何れか複数を少なくとも用いて、所定時間経過毎の目標物センシング情報が示す目標物の位置、速度、加速度、移動方向のうちの何れか複数を予測処理して、過去に受信した目標物センシング情報を更新する。そして、受信した目標物センシング情報と、予測処理により更新された更新後の目標物センシング情報とが相関するかを判定する。また、受信した目標物センシング情報と更新後の目標物センシング情報とが相関すると判定した場合には、更新後の目標物センシング情報を受信した目標物センシング情報に再更新する。
(もっと読む)
対象物を位置特定するための方法およびシステム
本文書は対象物の位置特定のための方法およびシステムを説明する。対象物(1)は少なくとも一つの第1のタイプの信号を照射され、前記信号の反応を探知する方法を踏まえ。本発明によれば、前記対象物(1)は前記第1のタイプの信号を後方散乱するトランスポンダ(2,3)を取り付けられ、前記トランスポンダ(2,3)は、前記トランスポンダ(2,3)の後方散乱周波数に影響を与える第2のタイプの信号でも照射され、前記トランスポンダ(2,3)からの後方散乱信号は対象物を位置特定するために探知される (もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】モードSによる運用を継続しながら、マルチパスの影響で発生するゴースト機のアジマス領域の測定を行い得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴーストターゲットやリアル機からモードA/Cによる応答信号を返送させ、モードAアドレスが重複して検出される方位の分布を測定するようにしている。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】ゴースト応答の判定の確実性を向上し得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】複数のレーダ地上局による重複監視領域をSLO設定領域とし、制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標情報をアドレスとともにメモリ17に記憶しておき、SLO設定領域に対しSLO走査と非SLO走査とを実行し、SLO走査と非SLO走査とにより応答信号を返送する目標のアドレスと、メモリ17に登録されロールコールに移行した目標のアドレスとが一致するか否かを判定し、一致する場合に、SLO質問に対し返送された応答信号をゴースト応答として検出するようにしている。
(もっと読む)
レーダ装置及びレーダ信号処理方法
【課題】捜索時に素早く目標物を探知し、検定時に目標物までの距離を正確に測距することが可能なレーダ装置及びレーダ信号処理方法を提供する。
【解決手段】まず、パルス信号生成部10に対して高PRFを指定する。そして、高PRFに従って生成された変調パルス信号による反射波に対して、FFT処理部72でFFT処理を施すことによりクラッタ抑圧を行い、捜索処理部73で目標物の捜索を行う。捜索処理部73は、この捜索で目標物が探知された場合、この目標物のドップラ周波数に基づいて低PRFを選択する。続いて、パルス信号生成部10に対して、選択された低PRFを指定する。そして、低PRFに従って生成された変調パルス信号による反射波に対して、MTI処理部74でクラッタ抑圧を行い、検定・追跡処理部75で捜索処理部73により探知された目標物の検定を行う。
(もっと読む)
レーダ装置
【課題】安定した相関追尾が可能なレーダ装置を提供する。
【解決手段】FMCW方式のスイープ信号を送受信する送受信器20と、送受信器からの信号に基づき算出された目標の速度によって該目標を速度範囲毎にグルーピングする速度グルーピング部36と、前記速度グルーピング部によってグルーピングされた速度グループ毎に相関追尾を行う相関追尾部37を備えている。
(もっと読む)
物体検出装置
【課題】本発明は、時系列でのレーダの反射データが不安定な場合でも物体を高精度に検出することができる物体検出装置を提供することを課題とする。
【解決手段】レーダ検出手段10で検出された反射データをセグメントにグルーピングし、セグメント毎の反射データに基づいて物体を検出する物体検出装置1であって、所定の条件に基づいて反射データをセグメントにグルーピングするグルーピング手段22と、各反射データについて過去に属したセグメントの識別情報を特定するセグメント履歴特定手段23と、今回グルーピングされたセグメントに属する反射データの過去のセグメントの識別情報に基づいて、今回グルーピングされたセグメントと過去にグルーピングされたセグメントとの同一性を判別するセグメント識別手段23とを備えることを特徴とする。
(もっと読む)
低減された減衰RF技術を使用する、オブジェクト追跡中のマルチパス緩和のための方法およびシステム
広範囲の無線周波数(RF)基準でオブジェクトを同定し、追跡し、および位置探知する方法およびシステム。方法およびシステムは、RF位置探知信号の伝搬損失と精度損失とを最小限にする、低周波帯域のVHFを含む、狭帯域幅レンジング信号を使用する。方法とシステムは、追跡、位置探知精度をさらに改善する、狭帯域幅レンジング信号マルチパス緩和プロセッサを含む。信号は、マスターユニットからタグへと送信される。信号移動時間は、記録され、マスターとタグの間の距離が計算される。方法とシステムは、長距離のRF狭帯域幅レンジング信号貫通と、狭帯域幅レンジング信号マルチパス緩和プロセッサと併用してVHF帯を使用することによる改善された精度と、の達成を可能にする。デジタル信号処理とソフトウェア定義無線の技術が使用される。無線機によって送受信された実際の波形は、ソフトウェアによって定義される。マスターユニットとタグの役割は、逆にすることができる。 (もっと読む)
目標検出装置
【課題】レーダセンサを用いて受信信号から目標を検出する目標検出装置において、SN比が低い条件で目標を検出するため、動的計画法を用いて目標信号の積分路を探索する際の積分路の重複と、それによる誤警報発生の防止または抑制、及び動的計画法を用いて目標信号の積分路を探索する際の積分路探索処理の効率化を目的とする。
【解決手段】レーダセンサを用いて受信した信号に対する信号処理結果であるビデオ信号の各検出セルの状態推定を行うセル状態推定部を設け、セル状態推定部による状態推定結果および動的計画法における積分路探索時の評価値であるtrack scoreの分布状況に基づいて次スキャンにおける探索条件を設定する探索条件設定部を設ける。
(もっと読む)
レーダ装置
【課題】捜索ビーム走査で目標を有効に探知できなかったときでも、航跡品質の低下を防止し、追尾性能の低下を防止する。
【解決手段】このレーダ装置1は、複数の空中線素子1A〜1Lと、ビーム走査データ作成器3と、目標検出器6と、探知データ判定器7と、S/N算定器8と、追尾処理器9と、第1のビーム走査スケジューリング器10と、ビーム諸元選択器11と、第2のビーム走査スケジューリング器12とを備えている。探知データ判定器7にて有効な目標探知データが無いと判定されたときは、第2のビーム走査スケジューリング器12は、第1のビーム走査スケジューリング器10が出力したスケジューリングデータに対して、ビーム諸元選択器11にて算出された前記再捜索用のビームのビーム諸元データに基づいて、再度スケジューリングし直して再度のスケジューリングデータをビーム走査データ作成器3へ出力する。
(もっと読む)
21 - 40 / 91
[ Back to top ]