
Fターム[5J070BC03]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 態様 (846) | DME (115)
Fターム[5J070BC03]に分類される特許
81 - 100 / 115
半導体装置、及び半導体装置を用いた位置検出システム
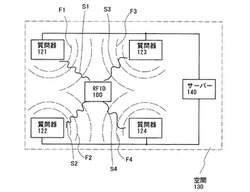
【課題】無線通信を行って、RFIDが空間において存在するか存在しないか、またそのRFIDが所有しているIDなどの情報を取得するほか、そのRFIDの位置を特定する。
【解決手段】複数の質問器とサーバーとをネットワーク接続して、位置検出システムを構築する。RFIDと質問器とで無線通信を行うことで、各質問器からRFIDまでの距離を求め、その距離のからRFIDの位置を求める。質問器からRFIDまでの距離を算出するには、RFIDで質問器から受信した信号の振幅に応じた周波数で信号を発振させる。RFIDで発振している信号の周波数を、RFID内でまたは質問器で検出することにより、質問器からRFIDまでの距離を検出する。
(もっと読む)
空港面監視装置

【課題】空港面探知レーダによる空港面監視を、マルチラテレーションの情報を統合することで補完し、効率的で安全な空港管制を実現可能にする。
【解決手段】空港に配置された複数の地上局により、目標が発信する信号を受信し、受信信号の到達時間差から目標の3次元位置情報を算出すると共に、目標の識別情報を得るマルチラテレーションと、3次元位置情報に基づいて目標が空港上空を低高度で飛行しているか、飛行せず空港面上に在るかの判定を行う目標高度監視装置と、当該判定結果に基づいて空港面探知レーダとマルチラテレーションが算出した目標の位置情報を統合処理し、得られた位置情報に対応する識別情報を付加する統合処理装置と、統合された目標の位置情報と識別情報を、空港面を表す座標上に表示する表示装置を備えたものである。
(もっと読む)
探索対象物探索装置
【課題】探索対象物との距離を精度良く割り出すことができるようにする。
【解決手段】探索対象物に設けられた探索対象物側装置1〜5から、到達距離の異なる5種類の電波21a〜21eを送信させる。各電波21a〜21eの到達距離が5m、10m、15m、20m、25mであり、探索装置10が到達距離25mの電波21eと到達距離20mの電波21dと到達距離15mの電波21cとを受信している場合、受信した電波の種類を報知するレベルメータ16により、探索者が探索対象物から10m以上15m以内の位置にいることが報知される。
(もっと読む)
無線送信器、無線受信器ならびに無線送信器および無線受信器を有するシステムおよび方法
本発明は、無線送信器(1,4)に関するものであり、この無線送信器には、少なくとも、連続信号(sFMTx(t))を形成する信号発生器(SGEN1)と、送信信号(sTx(t))を送出するアンテナ(ANT1)とが含まれている。上記の信号発生器(SGEN1)の少なくとも1つの出力側と、アンテナ(ANT1)の少なくとも1つの入力側とが接続されている。上記の送信信号発生器(SGEN1)とアンテナ(ANT1)とは、これらの間に接続された遮断ユニット(SW1)を介して接続されており、この遮断ユニットにより、上記の送信信号発生器(SGEN1)とアンテナ(ANT1)との間の信号接続が選択的に遮断または保持される。 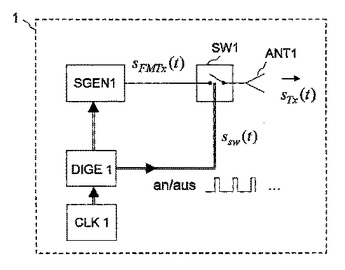 (もっと読む)
(もっと読む)
RF技術を用いた物体の追跡における低減された減衰のための方法およびシステム
無線周波数(RF)ベースの物体の識別、追跡、および位置特定のための方法およびシステム。本方法およびシステムは、より低い周波数範囲のVHFで狭帯域幅信号を使用し、伝搬損失およびRF位置特定信号の精度の低下を最小限に抑える。信号は、マスタユニットからタグまで送信される。信号移動時間が記録され、マスタとタグとの間の距離が計算される。本方法およびシステムは、VHF帯域を使用することによって、より長距離のRF信号の透過および正確さの向上を達成することができる。デジタル信号処理およびソフトウェア規定無線技術が使用される。無線によって送受信される実際の波形は、ソフトウェアによって定められる。マスタユニットおよびタグの役割は、逆にすることができる。 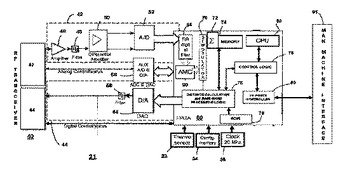 (もっと読む)
(もっと読む)
無線通信装置
【課題】同期処理が不要で、消費電力の小さな無線通信装置を提供する。
【解決手段】互いに無線通信する第1無線機1と第2無線機2とを備え、第1無線機1は、距離測定信号を送信するとともに、距離測定信号の送信タイミングで送信タイミング信号を出力する送信回路3と、折り返し信号を受信するとともに、折り返し信号の受信タイミングで受信タイミング信号を出力する受信回路5と、送信タイミング信号に対する受信タイミング信号の時間差を遅延時間として測定する遅延時間測定回路7と、遅延時間に基づいて、第1無線機1と第2無線機2との距離を演算する距離演算回路8とを含み、遅延時間測定回路7は、並列に接続され互いに遅延特性の異なる複数の遅延回路D1〜Dnを有し、送信タイミング信号を複数の遅延回路D1〜Dnを介して遅延させた遅延送信タイミング信号と、受信タイミング信号とを用いて遅延時間を測定するものである。
(もっと読む)
無線通信装置およびその盗難防止方法
【課題】盗難防止装置の取り付け作業が不要となり、顧客の邪魔にならず、かつ、美観を損ねないような盗難防止技術を提供する。
【解決手段】無線通信装置は、データ通信手段と測距手段とを備えた無線通信部と、測距手段により測定された無線通信装置から特定の位置までの距離が盗難警告の出力条件を満たすと盗難警告を出力する警告出力部とを含む。
(もっと読む)
信号伝送装置
【課題】真水あるいは海水あるいは液状の高誘電体物質あるいはこれらを含む液体中において、電磁波信号を低損失で伝送させるための信号伝送装置を実現する。
【解決手段】発信手段21からは、320MHz以下の周波数帯の電磁波信号を小型のループアンテナ213によって液体中に放射し、当該放射された電磁波信号は、受信手段22に接続された小型ループアンテナ223によって受信する。ループアンテナ213と223は、当該液体の比較的に高い誘電率によって共振状態あるいはマッチング状態となり、電磁波信号を低損失で効率よく伝送することができる。
(もっと読む)
測距システム
【課題】 パルス列を構成する各パルス信号の到達時間から距離を算出する測距システムにおいて、より誤差を軽減させた高精度の距離測定を実現する。
【解決手段】
受信したパルス列を構成するパルス信号数をカウントすることにより、パルス信号を生成する発振器につき、発信装置2と返信装置3との間で相対的な時間差を求め、さらに発信装置2から返信装置3までの距離を算出するとともに、算出された相対的な時間差に基づいて上記算出した距離を補正する。
(もっと読む)
移動情報検出装置
【課題】無線ICタグを取り付けた移動体を1つのアンテナおよびリーダ装置で検知して、移動体の特定と同時に、進行方向および移動速度をも検出できる移動情報検出システムを提供する。
【解決手段】移動体の移動方向に所定距離を隔てて2個の無線ICタグを取り付ける。移動体の移動経路には、移動体の2個の無線ICタグを通過した順番に個別に検知できるアンテナ303が配置される。移動体がアンテナ303を通過する際の2個の無線ICタグの読み取り順序から移動体の移動方向が判別される。また、2個の無線ICタグの読み取り時間差で2個の無線ICタグの配置間隔を除することによって、アンテナ303を通過する際の移動体の移動速度が求められる。
(もっと読む)
距離表示システムおよび方法
距離表示システムは送信部(214)、その送信部から離間するトランシーバ(216)およびそのトランシーバに対して離間した関係に保持される受信部(214A)を含む。送信部は第一電磁波(EW1)を送信する。トランシーバは第一電磁波を受信し、受信部に第二電磁波(EW2)を送信する。トランシーバは、入力に関して第二電磁波を変調し、送信部とトランシーバとの間の距離(D1)、加速度入力、圧力レベルまたは温度示度といった信号、データまたは情報を伝達するよう作動する。  (もっと読む)
(もっと読む)
通信システム、無線警報装置及びそのプログラム
【課題】低電力通信においてフェージングやマルチパスがあっても正確に通信相手との距離に対応した受信レベル値を決定する。
【解決手段】第1の送受信機2と第2の送受信機5とによってなり、第1の送受信機2は複数のアンテナ1を有してパケットデータを送信している途中に複数のアンテナ1を切り替え、第2の送受信機5は第1の送受信機2でパケットデータを送信する間に切り替えたそれぞれの複数のアンテナ1での送信時間中の受信レベルをそれぞれ少なくとも1回以上測定し、複数の受信レベルから最大値等を計算し、受信レベル値を求める。
(もっと読む)
RFIDシリーズを使用する位置管理システムの構築方法
この発明はRFIDシリーズを使用する位置管理システムの構築方法に関する。特に、この発明は多くのRFIDがRFIDシステムを構築するために必要な場合でさえ、多くのRFIDタグを同時に設置することにより、混乱なく僅かの時間と労力で作業を完了するRFIDシリーズと、RFIDシリーズを使用する目標空間の位置を効果的に管理するシステムを構築する方法とを提供し、目標空間の付属図面(又はコンピュータ化図面)はRFIDタグがかなり広い空間に渡り取り付けられる場合でさえ必要とせず、むしろ目標空間の位置管理システムの図面をRFIDタグを取り付けることにより作成することができる。 (もっと読む)
視力測定システム,情報処理装置,遠隔操作装置,情報処理方法,遠隔操作方法およびコンピュータプログラム
【課題】 空間的制約のある場所においても,簡易な方法で視力を測定する。
【解決手段】 遠隔操作装置104を操作するユーザの視力を測定する情報処理装置102に,装置間距離を測定する距離測定部122と;装置間距離,視力測定の視標として表示される視力検査画像の大きさ,および視力測定結果の対応関係を示した視力換算情報記憶部128と;所定の大きさの視力検査画像を表示する画像表示部134と;遠隔操作装置を介して入力された視力検査画像の認識結果と,表示された視力検査画像とを比較する比較部136と;比較部の比較結果に応じて,画像表示部に表示された視力検査画像の大きさを調整する画像調整部138と;距離測定部により測定された装置間距離と,画像表示部に表示された視力検査画像の大きさとに対応する視力測定結果を,視力換算情報記憶部から抽出する視力測定結果抽出部126と;を備える。
(もっと読む)
無線タグ探索方法および装置
【課題】
無線タグの位置の探索を支援する。
【解決手段】
無線タグの位置を探索する際に、無線装置は無線タグに対してID番号の送信を要求する。無線タグが送信した電磁波を受信した無線装置は、電磁波の受信強度と、無線装置のアンテナの受信特性と、物体に取り付けられた状態における無線タグの送信特性と、空間を伝搬する電磁波強度と伝搬距離との関係を表す計算式に基づいて、無線装置から無線タグまでの距離や方向を推定し、その推定位置を無線タグのID番号と関連付けて表示する。複数回の探索により無線タグの位置を特定するため、無線装置の向きを指示し、各探索で推定された推定位置の重なりを表示する。
(もっと読む)
RFIDタグ装置、RFIDリーダライタ装置及び距離測定システム
【課題】 低コスト、高速及び/又は高精度に、RFIDタグ装置及びRFIDリーダライタ間の距離を測定することを課題とする。
【解決手段】 アンテナを介して受信した信号の大きさをアナログ形式からデジタル形式に変換するアナログ/デジタル変換回路と、デジタル形式の信号又はそれを基にした信号をアンテナを介して送信する送信回路とを有するRFIDタグ装置(102)が提供される。また、アンテナを介して信号を送信する送信回路と、送信した信号の大きさを示す信号をアンテナを介して受信し、その受信した信号を基に距離情報に変換する変換回路とを有するRFIDリーダライタ装置(101)が提供される。
(もっと読む)
秘匿UWB測距のためのデバイス、方法及びプロトコル
互いに無線通信する少なくとも2つのデバイス間の安全な測距のための装置、システム、方法及びコンピュータプログラム製品。詳細には、超広帯域(UWB)プロトコルによって通信する少なくとも2つのデバイス間の安全な測距のための装置、システム、方法及びコンピュータプログラム製品。測距及びセキュリティのために、3値IR系列又は時間ホップIR系列のいずれかを用いる。第1のデバイスが測距パケットを送信する。第2のデバイスが、第1のデバイス及び第2のデバイスだけが知っている遅延時間後に、その測距パケットに応答する。遅延時間は、第1のデバイス又は第2のデバイスのいずれかによりランダムに選択することができ、暗号化された通知パケットによって、他方のデバイスに知らせることができる。 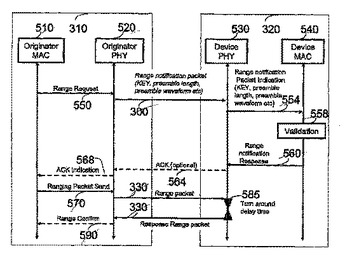 (もっと読む)
(もっと読む)
無線通信システムと無線通信装置および測距方法
【課題】動作周波数を高く設定しなくとも、高い精度で距離を測定する。
【解決手段】クロック信号MCKの周期よりも遅延量が短い遅延素子を用いて、遅延部12から遅延クロック信号DCK-1〜DCK-5を得る。測距信号PMの送出時に、タイミング情報生成部13は、クロック信号MCKや遅延クロック信号DCK-1〜DCK-5を用いてカウント動作を開始する。応答信号PRを受信したときのカウント値に基づいて、クロック信号MCKを用いたカウント動作のカウントタイミングと応答信号PRの受信タイミングとのタイミング差TEを検出する。距離演算部16は、タイミング差TEとクロック信号MCKを用いたカウント動作での応答信号PRを受信したときのカウント値DCを用いて経過時間を算出し、この経過時間に基づいて距離を算出する。
(もっと読む)
二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法
【課題】応答信号の受信異常の有無を通知することが可能な二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】応答信号を解読し、これが正常な信号であるか否かを判定する信号解読部18と、応答信号の全ての内容及び判定の結果を時刻と共に表示する表示部23と、判定の結果を時刻と共に記録する記録部21とを設ける。
(もっと読む)
静止衛星受信機の位置を決定するための方法および装置
本発明は、静止衛星アンテナを備えた静止衛星受信機の位置を衛星ペイロード信号内のレンジングパケットによって決定するための測位方法および測位装置に言及する。前記衛星ペイロード信号は、確定地球局位置にある1つまたは複数の地球局から送信され、異なる対地静止軌道位置にある1つまたは複数の衛星から、同じ静止衛星アンテナで受信されるように中継され、対応する衛星ペイロード信号内の各レンジングパケットは、そのレンジングパケットが、対応する地球局から送信された時刻についてのタイムスタンプ情報に関するものであり、その静止衛星受信機によって、受信された衛星ペイロード信号内で複数のレンジングパケットが検出され、対応するレンジングパケットの検出時刻相互間の相対的時間差が測定され、測定された相対的時間差が収集されて、測定された相対的時間差の冗長性を解決するための二次条件を用いて静止衛星受信機の位置を推定するために、確定地球局位置、タイムスタンプ情報および衛星位置情報に関連付けられる。 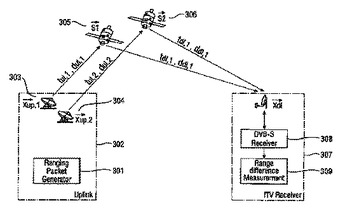 (もっと読む)
(もっと読む)
81 - 100 / 115
[ Back to top ]