
パターン寸法測定装置、方法及びプログラム
【課題】与えられたパターンの所定の部分の寸法を測定する際の精度の向上を図り得る構成を提供することを目的とする。
【解決手段】与えられたパターンを構成する点群から所定の演算によって近似線を求める近似線取得手段と、前記近似線から所定の演算によって基準点を求める基準点取得手段と、前記基準点から所定の演算によって測長位置を求める測長位置取得手段と、前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定手段とよりなる構成である。
【解決手段】与えられたパターンを構成する点群から所定の演算によって近似線を求める近似線取得手段と、前記近似線から所定の演算によって基準点を求める基準点取得手段と、前記基準点から所定の演算によって測長位置を求める測長位置取得手段と、前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定手段とよりなる構成である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はパターン寸法測定装置、方法及びプログラムに係り、特に与えられたパターンの所定の部分の寸法を測定するためのパターン寸法測定装置、方法及びプログラムに関する。
【背景技術】
【0002】
測長用走査型電子顕微鏡、いわゆるCD−SEMは、半導体ウエハ内の定められた箇所を撮像し、同箇所を測長する機能を有し、半導体装置、ハードディスク装置の記録・再生ヘッドの製造工程等において広く使用されている。
【0003】
この装置の一般的な手法は以下の通りである。
【0004】
まず、半導体ウエハ上で撮像すべき座標と、基準となるいわゆる教師画像と、同半導体ウエハの当該撮像に係る画像における測長位置と、エッジ検出アルゴリズムとを計測レシピとして予め登録しておく。
【0005】
次に、当該半導体ウエハが載置されたステージを粗動することにより、撮像位置を、同半導体ウエハ上の定められた座標まで移動する。そして撮像により得られた走査情報と前記予め登録しておいた教師画像とをテンプレートマッチングにより比較することにより、当該測長に係る画像範囲を決定する。
【0006】
最後に、そのようにして決定された画像範囲が映し出された画面に対し、予め定められた位置の走査情報を用いて当該画像に含まれるエッジを検出する。そして検出されたエッジ間の距離を測定、すなわち測長する。測長には、画像を画面に映し出すための圧縮処理が施される前の走査情報が用いられるため、一般にその測長精度は高い。
【0007】
また、走査型電子顕微鏡などで撮像されて画像情報となったものを対象とする場合に高精度で測長するための技術が特許文献1に開示されている。
【0008】
特許文献1に開示された技術では、走査顕微鏡などを介した撮像により得られた顕微鏡画像において、当該画像に含まれるパターンの辺を全て直線で近似することにより、そのパターン形状を特定する。そして当該直線間の交点から割り出された特定点などの2点間の距離を算出することによって前記パターンの特定の箇所を測長する。
【0009】
走査型電子顕微鏡などの画像では一般にそこに含まれるパターンの角が鈍って撮像される傾向にあるが、前記の特許文献1の方法によれば測定者の主観による測定点の指定という作業を排除できるため、測長ばらつきを低減することが可能とされている。
【0010】
しかしながら前記CD−SEMによる測長では、測長位置の位置決め精度はテンプレートマッチングの精度に依存する。ここで一般に特徴の少ないパターンが測長対象である場合、テンプレートマッチングの精度低下が生じやすく、もって測長位置の位置決め精度が低下する可能性がある。
【0011】
又顕微鏡画像に含まれるパターンにおいて全く特徴のない部分、例えば、後の製造工程で加工される予定の部分を測長するような場合、特許文献1の開示技術によってパターン形状を特定する方法では、測長位置を精度良く決定することは必ずしも容易ではないものと考えられる。
【特許文献1】特開2002−350127号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
本発明はこのような状況に鑑みてなされたものであり、上記CD−SEM、電子顕微鏡等によって得られた顕微鏡画像に含まれるパターン中の特定の部分を測長する場合に、同特定の部分を精度良く決定し、もって同部分の測長精度を効果的に向上可能な構成を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明では、与えられたパターンを構成する点群から近似線を求め、前記近似線から基準点を求め、前記基準点から測長位置を求めるようにした。
【0014】
その結果測長位置を高精度に得ることが可能となる。
【発明の効果】
【0015】
本発明によれば比較的簡易な方法で高精度に測長位置を決定可能なため、上記CD−SEM等で得られた画像を用いて製造品を検査するような場合に高精度且つ高速に検査作業を実施可能となる。
【発明を実施するための最良の形態】
【0016】
以下本発明の実施例の構成につき、図とともに詳細に説明する。
【0017】
本発明の実施例は走査型電子顕微鏡、CCDカメラ等によって得られた顕微鏡画像に対し高精度に計測位置を決定する機能を有する画像測長装置である。
【0018】
すなわち本発明の実施例による画像測長装置は、前記顕微鏡画像中のパターンの辺を近似して得られる基準線から測長の基準となる点を得る機能を有する。その結果測長位置の位置決め精度を効果的に向上可能である。
【0019】
後述の本発明の実施例1による画像測長装置は顕微鏡画像中の予め決められた位置で当該画像に含まれるパターンの寸法を測定、すなわち測長するための装置であり、同パターンの輪郭を構成する各辺部をなす点群を検出し、前記点群からパターンの輪郭を構成する各辺部の近似線を求め、同近似線、或いは同近似線の一又は複数の交点から基準点を求め、前記基準点から測長位置を求め、その測長位置においてエッジ検出により抽出された同パターンの輪郭であるエッジ間の寸法を測定、すなわち測長する機能を有する。
【0020】
又後述の本発明の実施例2による画像測長装置では、前記パターンの輪郭を構成する各辺部をなす点群を検出する際、或いは前記点群からパターンの輪郭を構成する各辺部の近似線を求める際、測長対象の顕微鏡画像の種類に応じて、前記近似線を抽出するための画像の領域を予め制限する。そして予め用意しておいた、いわゆる教師画像と前記制限された領域内の画像との間でテンプレートマッチングを実施することにより、顕微鏡画像と前記教師画像との間の位置ずれを検出する。そして同検出結果に基づき、検出された位置ずれを修正するべく、当該近似線を抽出するための画像の領域を前記顕微鏡画像上で移動する機能を持たせた。
【0021】
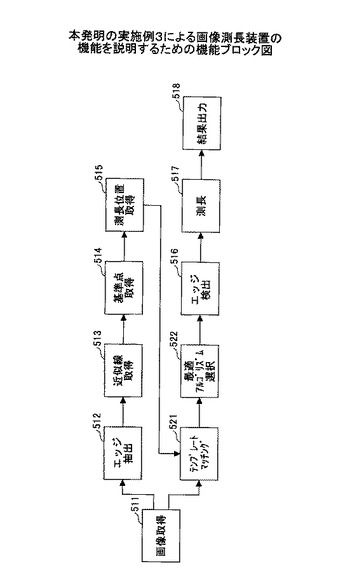
本発明の実施例3のよる画像測長装置では、前記パターンの輪郭を構成する各辺部をなす点群を検出する際、及び前記エッジ検出によりパターン寸法を測長する際において、予め用意しておいた複数の教師画像と前記顕微鏡画像との間でテンプレートマッチングを行う。そして予め用意しておいた対照表により、当該顕微鏡画像上の測長位置を決定するとともに、当該測長の際のエッジ検出アルゴリズム(後述)を選択する。その後、同決定に係る測長位置につき、同選択に係る最適なエッジ検出アルゴリズムを用いて当該パターンの寸法を測定、すなわち測長するようにした。
【0022】
本発明の実施例4による画像測長装置では、前記パターンの輪郭を構成する各辺部をなす点群を検出する際、予め用意しておいた教師画像と前記顕微鏡画像との間でテンプレートマッチングを行い、両画像間の相関を算出する。そして算出された画像間の相関が所定の閾値より大きい場合に、それ以降の手順を実施するようにした。
【0023】
本発明の実施例5による画像測長装置では、顕微鏡により撮像された顕微鏡画像を電子的に保存する手段を設けておき、所定の位置で当該画像に含まれるパターンの寸法を測定、すなわち測長する際、顕微鏡画像が撮像により得られ、これが前記保存する手段に保存されたことを検出する。そして同検出を契機として当該保存後の顕微鏡画像について所定の測長作業を開始し、同作業の結果を出力するようにした。
【0024】
これら上記本発明の各実施例の画像測長装置によれば、走査型電子顕微鏡などで得られた顕微鏡画像に対し、同画像に含まれるパターンの輪郭を構成する各辺部の近似線から求められた点を基準に測長位置を決めるようにしたため、測長位置のばらつきを効果的に低減可能である。その結果測長位置のばらつきに起因する測長結果のばらつきを効果的に低減可能である。
【0025】
又、前記顕微鏡画像に含まれるパターン中の、該当する製造品において後の製造工程で加工される予定の部分に対応する位置であり、当該顕微鏡画像中のパターンにおいては特に形状的に目立った特徴がない位置の部分を測長するような場合であっても、その測長位置を高精度に決定できる。もって、より高度な測長動作が実現でき、半導体装置、ハードディスク装置の記録・再生ヘッド等の製造工程において、製造品の検査を効率的に実施でき、もって製品の歩留りを向上させることが可能となり、大幅な製造コストの削減が可能となる。
【0026】
以下本発明の各実施例による画像測長装置の機能につき、図とともに詳細に説明する。
【実施例1】
【0027】
まず本発明の実施例1の画像測長装置について説明する。
【0028】
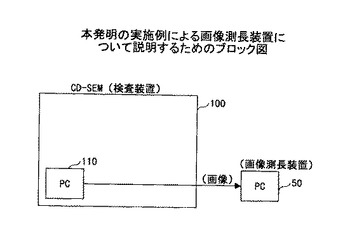
図1は本発明の実施例1による画像測長装置50の機能について説明するための図である。ここでは一例として、画像測長装置50がパーソナルコンピュータにより構成されるものとする。
【0029】
図1に示される如く、画像測長装置50は上記CD−SEM100に接続され、CD−SEM100を制御するパーソナルコンピュータ110から検査対象品の撮像画像、すなわち顕微鏡画像の転送を受ける。そして画像測長装置50では、転送された顕微鏡画像を画像処理することにより、検査対象品の所定の部分の寸法を測定、すなわち測長する。そのようにして検査対象品の所定の部分の寸法の情報により、当該製造品が所定の許容範囲内に収まっているか否かの判定等を行う。
【0030】
図2は同画像測長装置50の機能を説明するための機能ブロック図であり、図3は同画像測長装置50の機能を説明するための動作フローチャートである。
【0031】
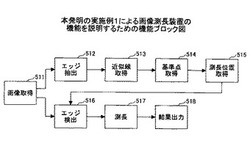
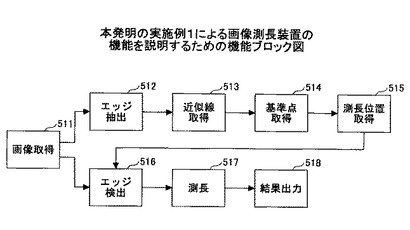
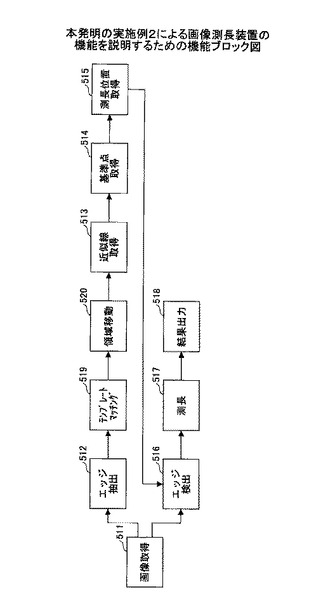
図2に示す如く、画像測長装置50は、CD−SEM100のパーソナルコンピュータ110から検査対象品の撮像画像、すなわち顕微鏡画像を受信する画像取得部511,当該顕微鏡画像に含まれるパターンのエッジを抽出するエッジ抽出部512,抽出されたエッジから近似線を取得する近似線取得部513、取得された近似線から基準点を求める基準点取得部514,求められた基準点から測長位置を取得する測長位置取得部515,前記顕微鏡画像中、測長位置取得部515で取得された測長位置におけるエッジを検出するエッジ検出部516,検出されたエッジ間の距離を測定、すなわち測長する測長部517及び測長結果を出力する結果出力部518を含む。
【0032】
これら各部511〜518は、この例の場合、画像測長装置50を構成するパーソナルコンピュータのCPUが、所定のプログラムを実行することにより実現される。
【0033】
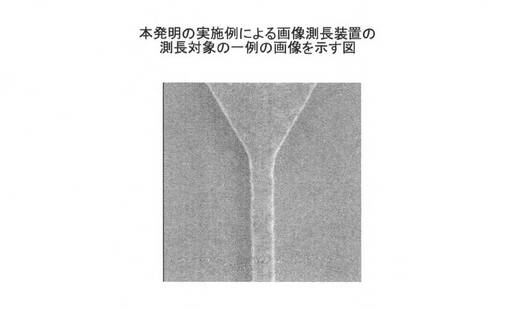
又ここでは上記検査対象品の顕微鏡画像、すなわち測長対象の顕微鏡画像の例として、図4に示すハードディスク装置の記録・再生ヘッドの、その製造工程での撮像によって得られた走査型電子顕微鏡画像(単に「顕微鏡画像」と称する)を想定する。図4中、垂直方向がy軸であり、水平方向がx軸である。
【0034】
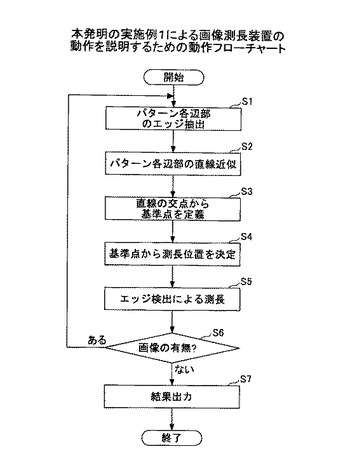
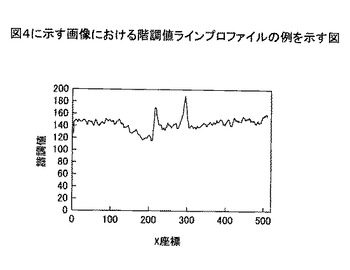
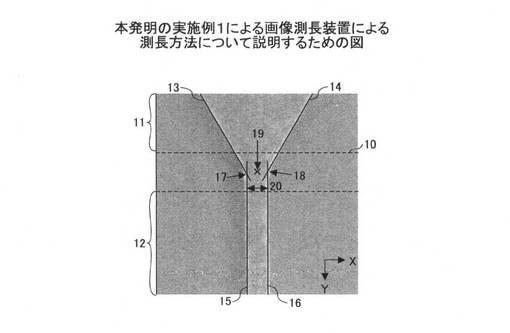
図3中ステップS1で、図2のエッジ抽出部512の機能として、顕微鏡画像の各画素の、各y座標におけるx軸方向の階調値のラインプロファイルから階調値が極大となる2点を抽出することにより、当該顕微鏡画像に含まれる、検査対象品の輪郭線を示すパターンの各辺をなす点群を抽出する。図6に、図5中直線10上の、各画素の階調値のラインプロファイルを示す。
【0035】
次に、ステップS2で、近似線取得部513の機能として、図5中、左側の点群の内、曲線部分を含まない領域11に含まれる点のみを使用して、ハフ変換(後述)を用いて直線13を、同様に右側について直線14を、それぞれ近似線として取得する。更に、左側の点群の内、曲線部分を含まない領域12に含まれる点のみを使用して、ハフ変換を用いて直線15を、同様に右側について直線16を、それぞれ近似線として取得する。
【0036】
次に、ステップS3で、基準点取得部514の機能として、このようにして求められた近似線としての直線13と直線15の交点17、直線14と直線16の交点18をそれぞれ演算により求め、例えば、その間の中点19を、測長位置の位置決めのための基準点として得る。
【0037】
尚上記交点18は、例えば直線14及び直線16をx−y軸に関する関数として表し、関数演算を実施することにより求めることが可能である。
【0038】
次に、ステップS4で、測長位置取得部515の機能として、予め登録しておいた情報を基に、ステップS3で得られた基準点から測長位置20を決める。具体的には、例えば、後述するステップS5における測長の際のエッジ検出の始点の上記基準点に対する相対座標、エッジ検出を行うためにエッジを探索する範囲、エッジを探索する方向等の情報を基に測長位置20を決める。
【0039】
次に、ステップS5で、エッジ検出部516の機能として、顕微鏡画像の測長位置20におけるエッジ検出を実行し、次に測長部517の機能として、その結果検出された図5中左右両側のエッジに対応する2点間の距離を算出して測長を行う。
【0040】
図5の例では、図示のパターン中、測長位置20におけるx方向に沿う画素の階調値のラインプロファイルを求め、後述するエッジ検出アルゴリズムのいずれかによりエッジを検出する。ここで検出されるエッジは顕微鏡画像に含まれるパターンの輪郭線に該当するため、エッジ検出により検出された2点間の距離を算出することにより、当該パターンの測長位置20における幅20が得られる。上記2点間の距離の算出は、例えばその間の画素数を算出することにより可能である。
【0041】
更に、ステップS6で、画像測長装置50を構成するパーソナルコンピュータ中の指定されたディレクトリ内で、未測長の画像、すなわちステップS1〜S5とともに上述の測長動作が未だ実施されていない顕微鏡画像の有無を判定する。未測長の画像に対しステップS1からステップS5の測長動作を順次実施する。
【0042】
最後に、ステップS7で、結果出力部518の機能として、ステップS1〜S5によって得られた測長結果、近似線としての各直線、測長位置等のデータを該当する顕微鏡画像上に重ねたものを、当該パーソナルコンピュータのディスプレイに表示し、或いはデータファイルとして出力する。
【0043】
次に、上述の本発明の実施例1の画像測長装置の測長結果を従来のCD−SEMのみによる測長結果と比較し、その効果について説明する。
【0044】
CD−SEMにより同一半導体ウエハ内の44個の素子において、図5に示した測長位置20で測長し、一連の測長作業を5回繰り返した。
【0045】
一方、本発明の実施例1による画像測長装置により、CD−SEMが出力した画像データを図3とともに説明した方法で測長した。
【0046】
これらの測長結果から、同一素子に対する、5回繰り返し測長でのばらつきを評価し、図7に示すヒストグラムを得た。
【0047】
CD−SEMのみによる測長では撮像範囲がずれることにより測長位置がばらつき、その結果測長値に大きなばらつきが生じているのに対し、本発明の実施例1による画像測長装置による場合、撮像範囲がずれた画像においても高精度で測長位置が決められるため、測長値のばらつきを抑えることができている。
【0048】
このように、本発明の実施例1の画像測長装置により、高精度で所定の位置におけるパターンの測長が可能となる。
【0049】
なお、CD−SEMによる撮像において検査対象品に対する撮像範囲がずれるのは、一般的に図4,図5に示す如くの比較的縦長のパターンを対象とする場合、図中左右方向、すなわちx方向の位置決め精度が比較的高いのに対し、上下方向、すなわちy方向の位置決め精度を高めることは困難とされていることによる。
【0050】
ここで撮像範囲とは、例えば図4,図5の例の場合同図に示される画像は検査対象品のうちの一部分を撮像したものであるが、その場合の撮像に係る範囲を言う。この撮像範囲が上下方向にずれた場合、得られた画像中の所定の位置でパターンの測長を行っても検査対象品中の異なる部分を測長することとなるため測長誤差が生ずる。
【0051】
本発明の実施例1による画像測長装置50では上記の如く顕微鏡画像中のパターンの輪郭の近似線を求め、近似線に基づいて測長位置を決定している。このため、たとえ撮像範囲がずれた場合であっても、撮像範囲内の顕微鏡画像に含まれるパターンの特徴に応じて測長位置が調整されるため、撮像範囲のずれによる測長誤差を最小限に抑えることが可能となる。
【実施例2】
【0052】
次に本発明の実施例2の画像測長装置について説明する。
【0053】
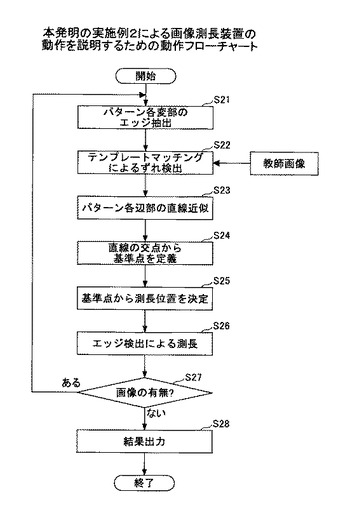
図8は同画像測長装置50の機能を説明するための機能ブロック図であり、図9は同画像測長装置50の機能を説明するための動作フローチャートである。
【0054】
この実施例2の画像測長装置50は上述の実施例1の画像測長装置50と同様の構成を有し、図8に示す如く、テンプレートマッチング部519及び領域移動部520が新たに加わっている。
【0055】
ここでも実施例1の場合同様、測長対象の顕微鏡画像として図4のものを想定する。
【0056】
図9中ステップS21で、顕微鏡画像中の画素の、各y座標におけるx方向に沿う階調値のラインプロファイルから階調値が極大となる2点を抽出することにより、各辺をなす点群を抽出する。
【0057】
次に、ステップS22で、テンプレートマッチング部519の機能として、予め用意しておいた基準となる、いわゆる教師画像と、測長対象の顕微鏡画像との間で、テンプレートマッチングを行う。このテンプレートマッチングの実施により、上記教師画像に対する測長対象の顕微鏡画像のずれ量を算出する。
【0058】
図10はこの場合の動作を説明するための図であり、同図(a)は基準となる測長基準画像30を示し、同図(b)は測長対象の顕微鏡画像35を示す。
【0059】
ここで図10(a)中の教師画像31は、同図(b)の測長対象の顕微鏡画像35と同じ画像サイズである測長基準画像30から切り出したものであり、画像サイズは測長対象の顕微鏡画像35のサイズの半分とされている。
【0060】
ここで教師画像31を切り出す際、画像とともに当該教師画像31の切り出し原点32の座標(XO1、YO1)を記憶しておく。同時に、測定基準画像30における所定の直線近似範囲33をY≦YU、直線近似範囲34をY≧YLとして記憶しておく。尚ここでx,y各座標の方向は、図10(a)の右下部分に示される方向とする。
【0061】
測長対象の顕微鏡画像35と教師画像31とのテンプレートマッチングにおいて、教師画像31と測定対象の顕微鏡画像35との相対位置を変化させながら画像間の類似度を測定する。そして画像間の類似度が最大となった際の教師画像31の原点32の、測定対象の顕微鏡画像35上の位置37(XO2、YO2)を求める。この場合、測定対象の顕微鏡画像35の教師画像31に対するx方向、y方向のずれ量が、両座標間の差、すなわちXO2−XO1、YO2−YO1として得られる。
【0062】
次に、ステップS23で、ステップS21で検出された点群の内、上記ずれ量を加味して得た直線近似範囲38、39(図10(b))に含まれる点群のみを使用し、顕微鏡画像に含まれるパターンの輪郭を構成する各辺部を直線近似する。ここで、上記ずれ量を加味して得る直線近似範囲38は、Y≦YU+(YO2−YO1)、直線近似範囲39はY≧YL+(YO2−YO1)として表される範囲である。
【0063】
これが領域移動部519の機能である。すなわちテンプレートマッチングの結果として得られた顕微鏡画像のずれ量に応じ、直線近似範囲38,39,すなわち近似線取得部513の機能によってパターンの輪郭を構成する各辺部を直線近似する際の対象となる点群の範囲を画定する矩形窓を顕微鏡画像上で移動することにより、同範囲を変更する。その結果当該直線近似の精度を効果的に向上可能である。
【0064】
すなわち図10の例では、図示の如く、画像中のパターンは、同図(a)に比して、同図(b)では撮像位置が若干上方向にずれている。すなわちパターンの上側の漏斗状の部分を見ると、図10(b)における方が、同図(a)におけるより、y方向により長く現れている。すなわち漏斗状の下端部分が下側にずれて写っている。
【0065】
このような場合、上記顕微鏡画像のずれ量は、y方向にプラスの量として得られる。したがって直線近似を行う点群を画定する矩形窓はそれぞれ下方向に移動される。その結果、図示の如く、上側の直線近似範囲38は測長基準画像30の直線近似範囲33に対し若干長く設定され、逆に下側の直線近似範囲39は測長基準画像30の直線近似範囲34に対し若干短く設定される。
【0066】
以降のステップS24〜ステップS28の動作は実施例1におけるステップS3〜S7の動作と同様であり、重複する説明を省略する。
【0067】
このように第2実施例では教師画像と測長対象の顕微鏡画像とのパターンマッチングを行い、パターンの輪郭を構成する各辺部の直線近似範囲を画定する矩形窓を、パターンマッチングで得られた、対応するパターンの教師画像に対するずれの分だけ顕微鏡画像上で移動させる。その結果高精度にパターンの輪郭を構成する各辺部の近似直線を求める際の対象となる点群の範囲を、より適切なものにすることが可能となる。その結果近似曲線の取得の精度を効果的に向上可能であり、決められた位置におけるパターンの測長の精度を向上させることが可能となる。
【実施例3】
【0068】
次に本発明の実施例3の画像測長装置について説明する。
【0069】
図11は同画像測長装置50の機能を説明するための機能ブロック図であり、図12は同画像測長装置50の機能を説明するための動作フローチャートである。
【0070】
この実施例3の画像測長装置50は上述の実施例1の画像測長装置50と同様の構成を有し、図11に示す如く、テンプレートマッチング部521及び最適アルゴリズム選択部522が新たに加わっている。
【0071】
実施例3では測長対象の画像群に、パターン形状やエッジコントラストが異なるA、B、Cの3種類の画像が含まれている状況を想定する。
【0072】
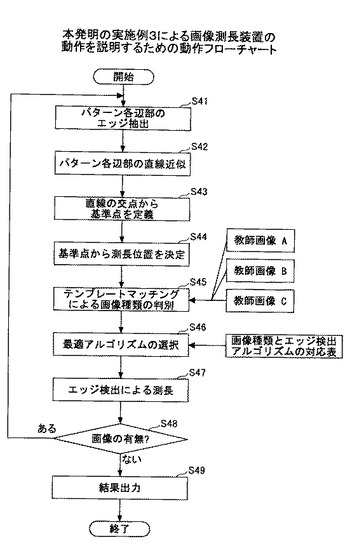
図12中ステップS41〜ステップS44で、顕微鏡画像に含まれるパターンの輪郭を構成する各辺部のエッジ点群を抽出し、基準点を得、測長位置を得る。これらの動作は実施例1におけるステップS1〜S4の動作と同様であり、重複する説明を省略する。
【0073】
次に、ステップS45で、テンプレートマッチング部521の機能として、測長対象の顕微鏡画像と、予め用意しておいた、上記A,B,Cの3種類にそれぞれ対応する教師画像A、B、Cのそれぞれとの間でテンプレートマッチングを行うことにより、測長対象の顕微鏡画像とこれら教師画像との間の類似度を算出する。ここで上記教師画像A、B、Cはそれぞれ上記画像種類A、B、Cを代表する画像とされる。
【0074】
上記ステップS45の結果として最も大きい類似度を有する教師画像がA,B,Cのいずれかであるかにより、測長対象の顕微鏡画像の画像種類がA、B、Cのいずれかであるかを判定する。
【0075】
次に、ステップS46で、最適アルゴリズム選択部522の機能として、予め用意しておいた、画像種類とエッジ検出アルゴリズムの対照表を参照し、当該顕微鏡画像の画像種類に最適なエッジ検出アルゴリズムを選択する。
【0076】
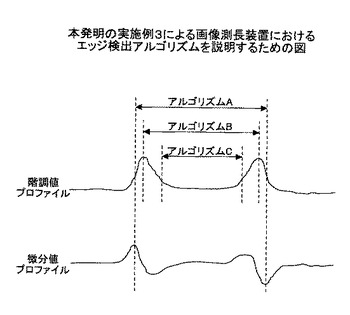
例えば、顕微鏡画像の画像種類がAであった場合、実施例1のステップS5に対応するステップS47におけるエッジ検出による測長動作中のエッジ検出において、図9に示す如く、顕微鏡画像の測長位置における画素の階調値の微分値を求め、微分値のラインプロファイル(同図中、微分値ラインプロファイル)において最大値と最小値とを求め、これらをエッジとして得るアルゴリズム、すなわち画素値の微分値のラインプロファイルにおいて最大値及び最小値を求める方法を選択する。
【0077】
他方顕微鏡画像の画像種類がBであった場合、図9中、顕微鏡画像の測長位置における画素の階調値のラインプロファイル(図9中、「階調値ラインプロファイル」)における極大値をエッジとして得るアルゴリズム、すなわち画素の階調値のラインプロファイルにおいて極大値を求める方法を選択する。
【0078】
又顕微鏡画像の画像種類がCであった場合、図9中、顕微鏡画像の測長位置における画素の階調値のラインプロファイルにおいて、階調値がある閾値を越える点を、階調値のラインプロファイルにおける極大値としての2点の中点を始点とし両側に向かって探索して求め、それらの点をエッジとして得るアルゴリズム、すなわち画素の階調値のラインプロファイルにおいて閾値により求める方法を選択する。
【0079】
ステップS47ではこのようにして選択されたアルゴリズムにより顕微鏡画像の測長位置におけるエッジ検出を行い、当該位置におけるパターンの幅を測長する。ステップS47〜ステップS49の動作は実施例1におけるステップS5〜S7の動作と同様であり、重複する説明を省略する。
【0080】
走査型電子顕微鏡で得られる顕微鏡画像では検査対象品上の凹凸形状、材質等の条件により、撮像時のエッジコントラストが大きく異なる場合がある。このような条件において得られた顕微鏡画像から精度良く測長を行うためには、各条件に応じて最適なエッジ検出アルゴリズムを適用する必要がある。
【0081】
従来はこの最適なエッジ検出アルゴリズムの選択を、操作者自身が判断して行っていた。それに対しこの実施例3の画像測長装置によれば、測長前の準備として、画像種類に応じた教師画像と対応する最適なエッジ検出アルゴリズムとの対照表を予め作成しておき、後の工程では、テンプレートマッチングの結果により自動的に最適なエッジ検出アルゴリズムを選択して適用するようにした。したがって大幅な測長工数の削減が実現できる。
【0082】
なおこのエッジ検出アルゴリズム、すなわちエッジ検出方法については、図21とともに後述する。
【実施例4】
【0083】
次に本発明の実施例4の画像測長装置について説明する。
【0084】
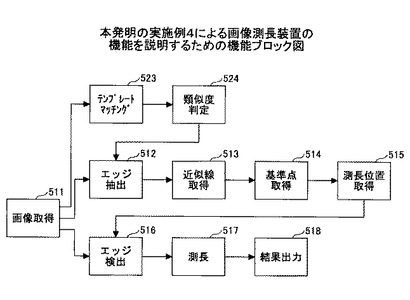
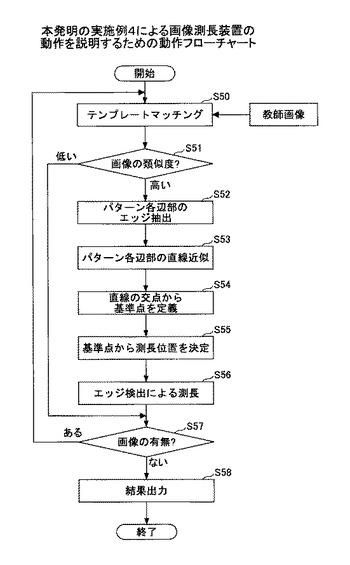
図14は同画像測長装置50の機能を説明するための機能ブロック図であり、図15は同画像測長装置50の機能を説明するための動作フローチャートである。
【0085】
この実施例3の画像測長装置50は上述の実施例1の画像測長装置50と同様の構成を有し、図14に示す如く、テンプレートマッチング部523及び類似度判定部524が新たに加わっている。
【0086】
実施例5では、まず図15中ステップS50で、テンプレートマッチング部523の機能として、測長対象の顕微鏡画像に対し、予め用意しておいた教師画像との間でテンプレートマッチングを行うことによって両画像間の位置合わせを行う。そのようにして双方間のずれの修正を行った上で、教師画像と測長対象の顕微鏡画像との間の類似度を算出する。
【0087】
次に、ステップS51で、類似度判定部524の機能として、予め用意しておいた類似度の閾値を参照し、得られた類似度がその閾値より大きい場合にはその後のステップS52〜ステップS56の測長動作を行う。ステップS52〜ステップS56の測長動作は実施例1におけるステップS1〜S5のものと同様であり、重複する説明を省略する。
【0088】
一方、類似度が閾値より小さい場合(ステップS51の「低い」)には、その顕微鏡画像が測長する必要のない別種の画像であると判断し、そのままステップS57に移動して他の顕微鏡画像の測長動作を行う動作を実施する。
【0089】
CD−SEMでの半導体ウエハの自動測長においては、視野移動の他にフォーカス合せも自動で行っているが、検査対象品の表面状態の違いなどによりフォーカスが合っていない状態で撮像してしまう場合が生じ得る。また、製造プロセスの途中で何らかの不具合があり、部分的、もしくは完全に測長対象の素子部分が破壊されるような場合も想定される。
【0090】
このように、CD−SEMによる撮像に係る顕微鏡画像には、当該画像に基づいてなされる上述の如くの測長処理に適さないもの、或いはその必要のないものが含まれている可能性がある。上述の実施例4の画像測長装置によれば、測長対象の画像群にそれら測長不適或いは不要の画像が含まれる場合にはそれらが測長工程から自動的に除外される。その結果無駄な測長処理の実施を省略することできるため、多数の測長対象の顕微鏡画像に対する処理を行う場合のトータルの測長工数を効果的に削減できる。
【実施例5】
【0091】
次に本発明の実施例5の画像測長装置について説明する。
【0092】
この実施例5では、CD−SEM100を制御しているコンピュータ110自体が画像測長装置として機能する。
【0093】
図16は同画像測長装置110の機能を説明するためのブロック図であり、図17は同画像測長装置110の機能を説明するための動作フローチャートである。
【0094】
この実施例5の画像測長装置110は、その測長動作を行う部分において上述の実施例1等による画像測長装置50と同様の構成を有する。この場合図16に示す如く、CD−SEM100を制御するパーソナルコンピュータ110自体が上記の如く画像測長装置として機能する。
【0095】
まず図17のステップS60で、当該コンピュータ110自体を監視する。そして、例えばステップS61にて、同コンピュータ110中の画像が格納されるディレクトリに存在されているファイル数を調べ、同ファイル数が増加した場合(ステップS61の「ある」)、ステップS62でその増加に係る顕微鏡画像に対する測長動作を行い、ステップS63にてその測長結果を出力する。上記ディレクトリ中の上記増加に係る顕微鏡画像の判別は、例えば、該当する画像ファイルのタイムスタンプを調べることによって可能である。
【0096】
ステップS62で行われる測長動作は上述の実施例1〜実施例4のそれぞれにおける測長動作、すなわち図3,図9,図12,図15のそれぞれの動作フローチャートとともに上述した測長動作のうちのいずれのものでもよい。ここでステップS62の工程には顕微鏡画像に含まれるパターンの輪郭を構成する各辺部をなす点群の抽出からエッジ検出によるパターン寸法の測長までの一連の動作が含まれるが、図11,図12とともに上述の実施例3における如くのエッジ検出アルゴリズムの自動選択機能を有するものとすることが望ましい。
【0097】
従来の画像測長装置では、測長作業を行う対象となる顕微鏡画像、もしくはその画像群を操作者が判断して指定する必要があった。その結果画像数が膨大である場合には、画像を選択する作業が画像測長作業の大半の工数を占めるような状況も想定される。本発明の実施例5の画像測長装置によれば、ほぼ完全に人手を介在させることなく自動的に測長動作が実行され、更に特に遅延時間を生じることなく、操作者は測長結果を知ることができる。
【0098】
すなわち実施例5によれば、CD−SEM100において検査対象品の顕微鏡画像の取得がなされ、これがコンピュータ110のハードディスク装置等の所定のディレクトリに保存されると、これが自動的に検出され、その新たな保存に係る顕微鏡画像に対する測長動作が自動的に開始される。したがって操作者は、顕微鏡画像の取得後に当該顕微鏡画像を前記所定のディレクトリに保存する操作を行うだけで、後は画像測長装置の機能により当該顕微鏡画像に対する測長動作が自動的に実行され、操作者はその結果を得ることができる。
【0099】
以上、本発明の各実施例について説明してきたが、本発明の実施例はこれらの構成、条件等に限られるものではなく、各種の変更が可能である。例えば上記各実施例では顕微鏡画像に含まれるパターンの輪郭を構成する各辺部を直線で近似しているが、曲線による近似としてもよい(図19とともに後述)。
【0100】
又上記実施例2においては、直線近似の対象の点群の範囲を画定する矩形窓を、パターンマッチングで得られたずれ量の分だけ移動しているが、このずれ量の算出は、パターンの輪郭を構成する各辺部をなす点群を検出する段階で行っても良い。
【0101】
又上記実施例3においては、テンプレートマッチングによる画像種類の判定によって最適なエッジ検出アルゴリズムを選択して適用している。これに対し、画像種類と最適なエッジ検出アルゴリズムと測長位置との対照表を予め用意しておくことにより、画像種類の判定の結果によって最適なエッジ検出アルゴリズムとともに測長位置をも得ることができる。そして当該測長位置において当該最適なエッジ検出アルゴリズムにより測長動作を行う構成としても良い。更に、テンプレートマッチングを行う工程は変更可能である。例えば、パターンの輪郭を構成する各辺部のエッジ点群を抽出する前の段階でテンプレートマッチングを行って最適なエッジ検出アルゴリズムを選択し、選択されたアルゴリズムを、パターンの輪郭を構成する各辺部のエッジ点群を抽出するアルゴリズムとして適用してもよい。
【0102】
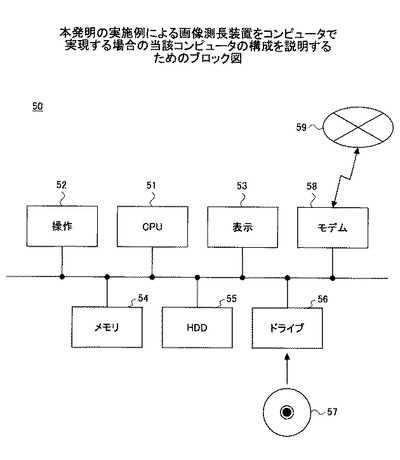
図18は本発明の各実施例を構成するコンピュータ50又は110の構成を示すブロック図である。
【0103】
図18に示すごとく、同コンピュータ50又は110は、与えられたプログラムを構成する命令を実行することによって様々な動作を実行するためのCPU51と、キーボード、マウス等よりなりユーザが操作内容又はデータを入力するための操作部52と、ユーザにCPU51による処理経過、処理結果等を表示するCRT、液晶表示器等よりなる表示部53と、ROM、RAM等よりなりCPU54が実行するプログラム、データ等を記憶したり作業領域として使用されるメモリ54と,プログラム、データ等を格納するハードディスク装置55と、CD−ROM57を媒介として外部からプログラムをロードしたりデータをロードするためのCD−ROMドライブ56と、インターネット、LAN等の通信網59を介して外部サーバからプログラムをダウンロード等するためのモデム58とを有する。
【0104】
同コンピュータ50、110はCD−ROM57を媒介として、あるいは通信ネットワーク59を媒介として、上述の各実施例の画像測長装置が実行する測長動作等の処理、すなわち図3,図9,図12,図15のそれぞれの動作フローチャートによって示される動作をCPU51に実行させるための命令よりなるプログラムをロードあるいはダウンロードする。そしてこれをハードディスク装置55にインストールし、適宜メモリ54にロードしてCPU51が実行する。その結果、同コンピュータ50、110により画像測長装置が実現される。
【0105】
以下に上記各実施例における近似線取得部513における、顕微鏡画像に含まれるパターンの輪郭を構成する辺から近似線を求める場合の、直線近似以外の例について説明する。
【0106】
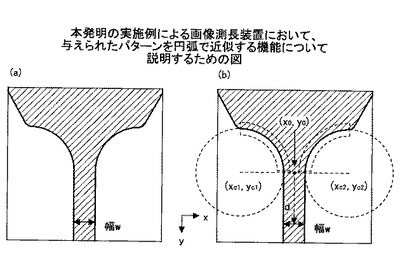
ここでは円(もしくは楕円)により近似する例を示す。
【0107】
図19(a)に示すようなパターンにおいて矢印部の幅wを測長したい場合、図19(b)の破線で囲ったそれぞれの曲線部を円弧で近似し、その中心(xc1、yc1)及び(xc2、yc2)の中点(x0、y0)=((xc1+xc2)/2、(yc1+yc2)/2)を上記基準点とする。
【0108】
この例では、基準点から距離dの位置を測長位置として規定し、y座標がy0+dの位置でx方向に沿ってエッジ検出を行うことにより上記幅wを測長する。
【0109】
次に上記近似線取得部513において、顕微鏡画像に含まれるパターンの輪郭を構成する辺の近似線を求めるためのハフ変換について説明する。
【0110】
ハフ(Hough)変換については、例えば田村秀行編「コンピュータ画像処理」(オーム社、2002)の204ページから206ページに以下の通り記載されている。
【0111】
すなわち、検出したい線の形が予め決められており、代数方程式でその形状が表現できる場合には、線の形状を表すパラメータ空間に画像中の特徴点(エッジ点など)を写像するハフ変換(Hough
Transform)が有効であるとされている。ここでは最も標準的である直線検出用ハフ変換について述べる。
【0112】
まず直線を表す代数方程式としては、
ρ=xcosθ+ysinθ ...(B−1)
を用いる。
【0113】
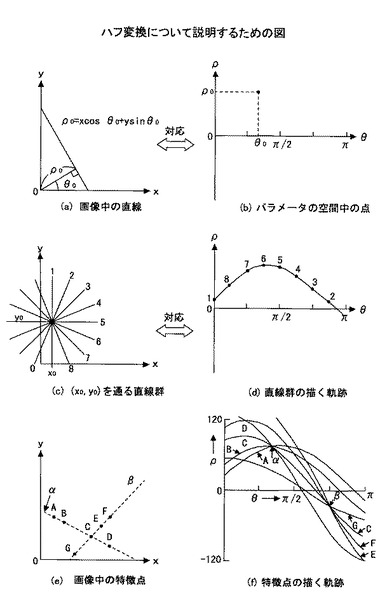
上式中、ρは座標原点から直線に下ろした垂線の長さ、θは垂線とx軸との間の角度を表すパラメータである。この代数方程式を用いると、図20(a)に示すx−y画像空間中の直線ρ0=x0cosθ+y0sinθは、図20(b)に示すρ−θパラメータ空間中の1点として表される。
【0114】
また、画像中の特徴点(x0、y0)を通る任意の直線は
ρ=x0cosθ+y0sinθ ...(B−2)
と表され、この式を満たす直線群図20(c)は、パラメータ空間中で図20(d)のような軌跡を形作る。
【0115】
見方を変えると、このことは、画像空間中の点(x0、y0)が式(B−2)で表されるパラメータ空間中の軌跡に写像されることを意味する。
【0116】
こうした画像空間とパラメータ空間との関係に基づき、ハフ変換では次のようにして直線検出を行う。
【0117】
1)パラメータ空間を表す2次元配列を用意し、その値をすべて0に初期化する。
【0118】
2)画像中の各特徴点の座標値を式(B−1)のx、yに代入した式を、ρとθに関する方程式とみなし、パラメータ空間中でその方程式の表す軌跡を描く(図20(e)参照)。
【0119】
軌跡の描画は、θを一定間隔Δθずつ増加させながら方程式を満たすρの値を計算することによって軌跡の通過する配列要素を求め、その値を1増やす(投票する)ことによって軌跡を重ね書きする。
【0120】
3)すべての特徴点に対応する軌跡を描いた後、多数の軌跡が集中している位置、すなわち、パラメータ空間を表す配列中で大きな極大値をもつ要素を求める。
【0121】
そうした要素が表すパラメータを(ρ*、θ*)とする。このパラメータは画像中の直線ρ*=xcosθ*+ysinθ*を表し、多数の特徴点を通る直線が検出されたことになる(図20(e)、(f)参照)。
【0122】
ハフ変換は、画像中の特徴点が連続していなくてもうまく直線が検出でき、エッジの追跡などに比べて雑音にも強いとされている。このようにハフ変換は優れた特性をもっており、最初に提案された1962年以来非常に多くの改良、拡張がなされている。
【0123】
ハフ変換は、直線のほか、円や楕円の検出にも利用できる。ただし、円の場合はパラメータが3つ、楕円の場合は5つ必要であり、単純は方法では、それぞれ3次元、5次元の配列を用意する必要があり、記憶容量、計算時間ともにかなり大きくなるという問題があるとされている。
【0124】
この問題に対しても種々の工夫が考えられている。また、多角形など単純な代数方程式では表現できない2次元図形を検出するための方法として一般化ハフ変換がある。さらに、3次元の平面や物体の検出・認識にもハフ変換の考え方を利用することができる。
【0125】
次にエッジ抽出部512或いはエッジ検出部516によるエッジ検出のための方法について述べる。
【0126】
エッジ検出方法については、例えば社団法人、日本半導体製造装置協会のホームページにおけるロードマップ(平成15年度)(URL:http://www.seaj.or.jp/rdmp/indx_f.htm、2006年10月12日現在)の第5編「計測」に示されている。
【0127】
すなわち、顕微鏡画像の画素の階調値のラインプロファイルを使用するものとして実際にCD−SEMに適用されているものとしては図21に示される各方式がある。又一般的には、他にも多数の方法があり、図13とともに説明した如く、微分値のラインプロファイルを使用する方法もある。図21中、Lは測長値を示し、Aは実際のパターン幅を示す。
【0128】
本発明は以下の付記の各々に記載の構成をとり得る。
(付記1)
与えられたパターンを構成する点群から近似線を求める近似線取得手段と、
前記近似線から所定の演算によって基準点を求める基準点取得手段と、
前記基準点から所定の演算によって測長位置を求める測長位置取得手段と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定手段とよりなるパターン寸法測定装置。
(付記2)
前記近似線取得手段は、前記点群を一又は複数の直線で近似する手段よりなる付記1に記載のパターン寸法測定装置。
(付記3)
前記近似線取得手段は、前記点群を一又は複数の所定の曲線で近似する手段よりなる付記1に記載のパターン寸法測定装置。
(付記4)
前記曲線は円弧とされてなる付記3に記載のパターン寸法測定装置。
(付記5)
前記近似線取得手段は、前記点群を、所定の関数で表される直線又は曲線で近似する手段よりなる付記1に記載のパターン寸法測定装置。
(付記6)
前記近似線取得手段は、ハフ変換を用いて近似線を求める構成とされてなる付記1乃至5のうちのいずれかに記載のパターン寸法測定装置。
(付記7)
前記基準点取得段階は、近似線取得段階で得られた近似線同士の交点に基づいて基準点を求める構成とされてなる付記1乃至6のうちの何れか一項に記載のパターン寸法測定装置。
(付記8)
前記近似線取得手段は、前記与えられたパターンを構成する点群のうち所定の領域に属する点群を対象とするものとされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する手段を含む構成とされてなる付記1乃至7のうちのいずれかに記載のパターン寸法測定装置。
(付記9)
前記寸法測定手段は、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる付記1乃至8のうちのいずれかに記載のパターン寸法測定装置。
(付記10)
前記所定の複数の方法は、画素値の微分値のラインプロファイルにおいて最大値及び最小値を求める方法、画素の階調値のラインプロファイルにおいて極大値を求める方法及び画素の階調値のラインプロファイルにおいて閾値により求める方法を含む構成とされてなる付記9に記載のパターン寸法測定装置。
(付記11)
更に前記近似線取得手段による近似線を求める動作が実行される前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作を実行しない構成とされてなる付記1乃至10のうちのいずれかに記載のパターン寸法測定装置。
(付記12)
前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作はコンピュータによる制御によって自動的に実行される構成とされ、
前記与えられたパターンの画像を撮像によって得る撮像手段によって得られた画像を保存する画像保存手段による画像の保存を検出する保存検出手段を有し、
前記保存検出手段による画像の保存が検出されたことを契機として、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作が自動的に開始される構成とされてなる付記1乃至11のうちのいずれかに記載のパターン寸法測定装置。
(付記13)
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とよりなるパターン寸法測定方法。
(付記14)
前記近似線取得段階は、前記与えられたパターンを構成する点群のうち、所定の領域に属する点群を対象としてなされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する段階を含む構成とされてなる付記13に記載の方法。
(付記15)
前記寸法測定段階では、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる付記13又は14に記載の方法。
(付記16)
更に前記近似線取得段階の前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記一連の近似線取得段階、基準点取得段階、測長位置取得段階及び寸法測定段階を実行しない構成とされてなる付記13乃至15のうちのいずれかに記載の方法。
(付記17)
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とをコンピュータに実行させるための命令よりなるプログラム。
(付記18)
前記近似線取得段階は、前記与えられたパターンを構成する点群のうち、所定の領域に属する点群を対象としてなされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する段階をコンピュータに実行させるための命令を含む構成とされてなる付記17に記載のプログラム。
(付記19)
前記寸法測定段階では、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる付記17又は18に記載のプログラム。
(付記20)
更に前記近似線取得段階の前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記一連の近似線取得段階、基準点取得段階、測長位置取得段階及び寸法測定段階を実行しない構成とされてなる付記17乃至19のうちのいずれかに記載のプログラム。
【産業上の利用可能性】
【0129】
本発明の適用例としては、上述の如くの半導体装置、ハードディスク装置などの製造工程における走査型電子顕微鏡画像に対するパターン測長に限られない。例えば本発明は顕微鏡画像を扱う全ての産業において適用可能である。又測長対象画像を得るための撮像装置としては上記走査型電子顕微鏡に限られず、光学顕微鏡、CCDカメラ、透過型電子顕微鏡等でもよく、本発明はこれらで撮像した画像に含まれるパターンの測長にも適用可能である。
【図面の簡単な説明】
【0130】
【図1】本発明の実施例による画像測長装置について説明するためのブロック図である。
【図2】本発明の実施例1による画像測長装置の機能を説明するための機能ブロック図である。
【図3】本発明の実施例1による画像測長装置の動作を説明するための動作フローチャートである。
【図4】本発明の実施例による画像測長装置の測長対象の一例の画像を示す図である。
【図5】本発明の実施例1による画像測長装置による測長方法について説明するための図である。
【図6】図4に示す画像における階調値のラインプロファイルの例を示す図である。
【図7】本発明の実施例1による画像測長装置の機能について説明するための図である。
【図8】本発明の実施例2による画像測長装置の機能を説明するための機能ブロック図である。
【図9】本発明の実施例2による画像測長装置の動作を説明するための動作フローチャートである。
【図10】本発明の実施例2による画像測長装置における測長位置の位置決め手順を説明するための図である。
【図11】本発明の実施例3による画像測長装置の機能を説明するための機能ブロック図である。
【図12】本発明の実施例3による画像測長装置の動作を説明するための動作フローチャートである。
【図13】本発明の実施例3による画像測長装置におけるエッジ検出アルゴリズムを説明するための図である。
【図14】本発明の実施例4による画像測長装置の機能を説明するための機能ブロック図である。
【図15】本発明の実施例4による画像測長装置の動作を説明するための動作フローチャートである。
【図16】本発明の実施例5による画像測長装置の機能を説明するためのブロック図である。
【図17】本発明の実施例5による画像測長装置の動作を説明するための動作フローチャートである。
【図18】本発明の実施例による画像測長装置をコンピュータで実現する場合の当該コンピュータの構成を説明するためのブロック図である。
【図19】本発明の実施例による画像測長装置において適用可能な、与えられたパターンの輪郭を円弧で近似する方法について説明するための図である。
【図20】ハフ変換について説明するための図である。
【図21】エッジ検出方法について説明するための図である。
【符号の説明】
【0131】
10 斜め辺の近似範囲の境界線
11、33、38 斜め辺の近似範囲
12、34、39 垂直辺の近似範囲
13、14 斜め辺の近似直線
15、16 垂直辺の近似直線
17、18 斜め近似直線と垂直近似直線の交点
19 測長の基準点
20 測長位置例
30 測長基準画像
31 教師画像切り出し範囲
32 教師画像切り出し原点
35 測長対象の顕微鏡画像
36 テンプレートマッチングにより検出された領域
37 テンプレートマッチングにより検出された領域の原点
50 画像測長装置
100 CD−SEM
511 画像取得部
512 エッジ抽出部
513 近似線取得部
514 基準点取得部
515 測長位置取得部
516 エッジ検出部
517 測長部
518 結果出力部
519、521、523 テンプレートマッチング部
520 領域移動部
522 最適アルゴリズム選択部
524 類似度判定部
【技術分野】
【0001】
本発明はパターン寸法測定装置、方法及びプログラムに係り、特に与えられたパターンの所定の部分の寸法を測定するためのパターン寸法測定装置、方法及びプログラムに関する。
【背景技術】
【0002】
測長用走査型電子顕微鏡、いわゆるCD−SEMは、半導体ウエハ内の定められた箇所を撮像し、同箇所を測長する機能を有し、半導体装置、ハードディスク装置の記録・再生ヘッドの製造工程等において広く使用されている。
【0003】
この装置の一般的な手法は以下の通りである。
【0004】
まず、半導体ウエハ上で撮像すべき座標と、基準となるいわゆる教師画像と、同半導体ウエハの当該撮像に係る画像における測長位置と、エッジ検出アルゴリズムとを計測レシピとして予め登録しておく。
【0005】
次に、当該半導体ウエハが載置されたステージを粗動することにより、撮像位置を、同半導体ウエハ上の定められた座標まで移動する。そして撮像により得られた走査情報と前記予め登録しておいた教師画像とをテンプレートマッチングにより比較することにより、当該測長に係る画像範囲を決定する。
【0006】
最後に、そのようにして決定された画像範囲が映し出された画面に対し、予め定められた位置の走査情報を用いて当該画像に含まれるエッジを検出する。そして検出されたエッジ間の距離を測定、すなわち測長する。測長には、画像を画面に映し出すための圧縮処理が施される前の走査情報が用いられるため、一般にその測長精度は高い。
【0007】
また、走査型電子顕微鏡などで撮像されて画像情報となったものを対象とする場合に高精度で測長するための技術が特許文献1に開示されている。
【0008】
特許文献1に開示された技術では、走査顕微鏡などを介した撮像により得られた顕微鏡画像において、当該画像に含まれるパターンの辺を全て直線で近似することにより、そのパターン形状を特定する。そして当該直線間の交点から割り出された特定点などの2点間の距離を算出することによって前記パターンの特定の箇所を測長する。
【0009】
走査型電子顕微鏡などの画像では一般にそこに含まれるパターンの角が鈍って撮像される傾向にあるが、前記の特許文献1の方法によれば測定者の主観による測定点の指定という作業を排除できるため、測長ばらつきを低減することが可能とされている。
【0010】
しかしながら前記CD−SEMによる測長では、測長位置の位置決め精度はテンプレートマッチングの精度に依存する。ここで一般に特徴の少ないパターンが測長対象である場合、テンプレートマッチングの精度低下が生じやすく、もって測長位置の位置決め精度が低下する可能性がある。
【0011】
又顕微鏡画像に含まれるパターンにおいて全く特徴のない部分、例えば、後の製造工程で加工される予定の部分を測長するような場合、特許文献1の開示技術によってパターン形状を特定する方法では、測長位置を精度良く決定することは必ずしも容易ではないものと考えられる。
【特許文献1】特開2002−350127号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
本発明はこのような状況に鑑みてなされたものであり、上記CD−SEM、電子顕微鏡等によって得られた顕微鏡画像に含まれるパターン中の特定の部分を測長する場合に、同特定の部分を精度良く決定し、もって同部分の測長精度を効果的に向上可能な構成を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明では、与えられたパターンを構成する点群から近似線を求め、前記近似線から基準点を求め、前記基準点から測長位置を求めるようにした。
【0014】
その結果測長位置を高精度に得ることが可能となる。
【発明の効果】
【0015】
本発明によれば比較的簡易な方法で高精度に測長位置を決定可能なため、上記CD−SEM等で得られた画像を用いて製造品を検査するような場合に高精度且つ高速に検査作業を実施可能となる。
【発明を実施するための最良の形態】
【0016】
以下本発明の実施例の構成につき、図とともに詳細に説明する。
【0017】
本発明の実施例は走査型電子顕微鏡、CCDカメラ等によって得られた顕微鏡画像に対し高精度に計測位置を決定する機能を有する画像測長装置である。
【0018】
すなわち本発明の実施例による画像測長装置は、前記顕微鏡画像中のパターンの辺を近似して得られる基準線から測長の基準となる点を得る機能を有する。その結果測長位置の位置決め精度を効果的に向上可能である。
【0019】
後述の本発明の実施例1による画像測長装置は顕微鏡画像中の予め決められた位置で当該画像に含まれるパターンの寸法を測定、すなわち測長するための装置であり、同パターンの輪郭を構成する各辺部をなす点群を検出し、前記点群からパターンの輪郭を構成する各辺部の近似線を求め、同近似線、或いは同近似線の一又は複数の交点から基準点を求め、前記基準点から測長位置を求め、その測長位置においてエッジ検出により抽出された同パターンの輪郭であるエッジ間の寸法を測定、すなわち測長する機能を有する。
【0020】
又後述の本発明の実施例2による画像測長装置では、前記パターンの輪郭を構成する各辺部をなす点群を検出する際、或いは前記点群からパターンの輪郭を構成する各辺部の近似線を求める際、測長対象の顕微鏡画像の種類に応じて、前記近似線を抽出するための画像の領域を予め制限する。そして予め用意しておいた、いわゆる教師画像と前記制限された領域内の画像との間でテンプレートマッチングを実施することにより、顕微鏡画像と前記教師画像との間の位置ずれを検出する。そして同検出結果に基づき、検出された位置ずれを修正するべく、当該近似線を抽出するための画像の領域を前記顕微鏡画像上で移動する機能を持たせた。
【0021】
本発明の実施例3のよる画像測長装置では、前記パターンの輪郭を構成する各辺部をなす点群を検出する際、及び前記エッジ検出によりパターン寸法を測長する際において、予め用意しておいた複数の教師画像と前記顕微鏡画像との間でテンプレートマッチングを行う。そして予め用意しておいた対照表により、当該顕微鏡画像上の測長位置を決定するとともに、当該測長の際のエッジ検出アルゴリズム(後述)を選択する。その後、同決定に係る測長位置につき、同選択に係る最適なエッジ検出アルゴリズムを用いて当該パターンの寸法を測定、すなわち測長するようにした。
【0022】
本発明の実施例4による画像測長装置では、前記パターンの輪郭を構成する各辺部をなす点群を検出する際、予め用意しておいた教師画像と前記顕微鏡画像との間でテンプレートマッチングを行い、両画像間の相関を算出する。そして算出された画像間の相関が所定の閾値より大きい場合に、それ以降の手順を実施するようにした。
【0023】
本発明の実施例5による画像測長装置では、顕微鏡により撮像された顕微鏡画像を電子的に保存する手段を設けておき、所定の位置で当該画像に含まれるパターンの寸法を測定、すなわち測長する際、顕微鏡画像が撮像により得られ、これが前記保存する手段に保存されたことを検出する。そして同検出を契機として当該保存後の顕微鏡画像について所定の測長作業を開始し、同作業の結果を出力するようにした。
【0024】
これら上記本発明の各実施例の画像測長装置によれば、走査型電子顕微鏡などで得られた顕微鏡画像に対し、同画像に含まれるパターンの輪郭を構成する各辺部の近似線から求められた点を基準に測長位置を決めるようにしたため、測長位置のばらつきを効果的に低減可能である。その結果測長位置のばらつきに起因する測長結果のばらつきを効果的に低減可能である。
【0025】
又、前記顕微鏡画像に含まれるパターン中の、該当する製造品において後の製造工程で加工される予定の部分に対応する位置であり、当該顕微鏡画像中のパターンにおいては特に形状的に目立った特徴がない位置の部分を測長するような場合であっても、その測長位置を高精度に決定できる。もって、より高度な測長動作が実現でき、半導体装置、ハードディスク装置の記録・再生ヘッド等の製造工程において、製造品の検査を効率的に実施でき、もって製品の歩留りを向上させることが可能となり、大幅な製造コストの削減が可能となる。
【0026】
以下本発明の各実施例による画像測長装置の機能につき、図とともに詳細に説明する。
【実施例1】
【0027】
まず本発明の実施例1の画像測長装置について説明する。
【0028】
図1は本発明の実施例1による画像測長装置50の機能について説明するための図である。ここでは一例として、画像測長装置50がパーソナルコンピュータにより構成されるものとする。
【0029】
図1に示される如く、画像測長装置50は上記CD−SEM100に接続され、CD−SEM100を制御するパーソナルコンピュータ110から検査対象品の撮像画像、すなわち顕微鏡画像の転送を受ける。そして画像測長装置50では、転送された顕微鏡画像を画像処理することにより、検査対象品の所定の部分の寸法を測定、すなわち測長する。そのようにして検査対象品の所定の部分の寸法の情報により、当該製造品が所定の許容範囲内に収まっているか否かの判定等を行う。
【0030】
図2は同画像測長装置50の機能を説明するための機能ブロック図であり、図3は同画像測長装置50の機能を説明するための動作フローチャートである。
【0031】
図2に示す如く、画像測長装置50は、CD−SEM100のパーソナルコンピュータ110から検査対象品の撮像画像、すなわち顕微鏡画像を受信する画像取得部511,当該顕微鏡画像に含まれるパターンのエッジを抽出するエッジ抽出部512,抽出されたエッジから近似線を取得する近似線取得部513、取得された近似線から基準点を求める基準点取得部514,求められた基準点から測長位置を取得する測長位置取得部515,前記顕微鏡画像中、測長位置取得部515で取得された測長位置におけるエッジを検出するエッジ検出部516,検出されたエッジ間の距離を測定、すなわち測長する測長部517及び測長結果を出力する結果出力部518を含む。
【0032】
これら各部511〜518は、この例の場合、画像測長装置50を構成するパーソナルコンピュータのCPUが、所定のプログラムを実行することにより実現される。
【0033】
又ここでは上記検査対象品の顕微鏡画像、すなわち測長対象の顕微鏡画像の例として、図4に示すハードディスク装置の記録・再生ヘッドの、その製造工程での撮像によって得られた走査型電子顕微鏡画像(単に「顕微鏡画像」と称する)を想定する。図4中、垂直方向がy軸であり、水平方向がx軸である。
【0034】
図3中ステップS1で、図2のエッジ抽出部512の機能として、顕微鏡画像の各画素の、各y座標におけるx軸方向の階調値のラインプロファイルから階調値が極大となる2点を抽出することにより、当該顕微鏡画像に含まれる、検査対象品の輪郭線を示すパターンの各辺をなす点群を抽出する。図6に、図5中直線10上の、各画素の階調値のラインプロファイルを示す。
【0035】
次に、ステップS2で、近似線取得部513の機能として、図5中、左側の点群の内、曲線部分を含まない領域11に含まれる点のみを使用して、ハフ変換(後述)を用いて直線13を、同様に右側について直線14を、それぞれ近似線として取得する。更に、左側の点群の内、曲線部分を含まない領域12に含まれる点のみを使用して、ハフ変換を用いて直線15を、同様に右側について直線16を、それぞれ近似線として取得する。
【0036】
次に、ステップS3で、基準点取得部514の機能として、このようにして求められた近似線としての直線13と直線15の交点17、直線14と直線16の交点18をそれぞれ演算により求め、例えば、その間の中点19を、測長位置の位置決めのための基準点として得る。
【0037】
尚上記交点18は、例えば直線14及び直線16をx−y軸に関する関数として表し、関数演算を実施することにより求めることが可能である。
【0038】
次に、ステップS4で、測長位置取得部515の機能として、予め登録しておいた情報を基に、ステップS3で得られた基準点から測長位置20を決める。具体的には、例えば、後述するステップS5における測長の際のエッジ検出の始点の上記基準点に対する相対座標、エッジ検出を行うためにエッジを探索する範囲、エッジを探索する方向等の情報を基に測長位置20を決める。
【0039】
次に、ステップS5で、エッジ検出部516の機能として、顕微鏡画像の測長位置20におけるエッジ検出を実行し、次に測長部517の機能として、その結果検出された図5中左右両側のエッジに対応する2点間の距離を算出して測長を行う。
【0040】
図5の例では、図示のパターン中、測長位置20におけるx方向に沿う画素の階調値のラインプロファイルを求め、後述するエッジ検出アルゴリズムのいずれかによりエッジを検出する。ここで検出されるエッジは顕微鏡画像に含まれるパターンの輪郭線に該当するため、エッジ検出により検出された2点間の距離を算出することにより、当該パターンの測長位置20における幅20が得られる。上記2点間の距離の算出は、例えばその間の画素数を算出することにより可能である。
【0041】
更に、ステップS6で、画像測長装置50を構成するパーソナルコンピュータ中の指定されたディレクトリ内で、未測長の画像、すなわちステップS1〜S5とともに上述の測長動作が未だ実施されていない顕微鏡画像の有無を判定する。未測長の画像に対しステップS1からステップS5の測長動作を順次実施する。
【0042】
最後に、ステップS7で、結果出力部518の機能として、ステップS1〜S5によって得られた測長結果、近似線としての各直線、測長位置等のデータを該当する顕微鏡画像上に重ねたものを、当該パーソナルコンピュータのディスプレイに表示し、或いはデータファイルとして出力する。
【0043】
次に、上述の本発明の実施例1の画像測長装置の測長結果を従来のCD−SEMのみによる測長結果と比較し、その効果について説明する。
【0044】
CD−SEMにより同一半導体ウエハ内の44個の素子において、図5に示した測長位置20で測長し、一連の測長作業を5回繰り返した。
【0045】
一方、本発明の実施例1による画像測長装置により、CD−SEMが出力した画像データを図3とともに説明した方法で測長した。
【0046】
これらの測長結果から、同一素子に対する、5回繰り返し測長でのばらつきを評価し、図7に示すヒストグラムを得た。
【0047】
CD−SEMのみによる測長では撮像範囲がずれることにより測長位置がばらつき、その結果測長値に大きなばらつきが生じているのに対し、本発明の実施例1による画像測長装置による場合、撮像範囲がずれた画像においても高精度で測長位置が決められるため、測長値のばらつきを抑えることができている。
【0048】
このように、本発明の実施例1の画像測長装置により、高精度で所定の位置におけるパターンの測長が可能となる。
【0049】
なお、CD−SEMによる撮像において検査対象品に対する撮像範囲がずれるのは、一般的に図4,図5に示す如くの比較的縦長のパターンを対象とする場合、図中左右方向、すなわちx方向の位置決め精度が比較的高いのに対し、上下方向、すなわちy方向の位置決め精度を高めることは困難とされていることによる。
【0050】
ここで撮像範囲とは、例えば図4,図5の例の場合同図に示される画像は検査対象品のうちの一部分を撮像したものであるが、その場合の撮像に係る範囲を言う。この撮像範囲が上下方向にずれた場合、得られた画像中の所定の位置でパターンの測長を行っても検査対象品中の異なる部分を測長することとなるため測長誤差が生ずる。
【0051】
本発明の実施例1による画像測長装置50では上記の如く顕微鏡画像中のパターンの輪郭の近似線を求め、近似線に基づいて測長位置を決定している。このため、たとえ撮像範囲がずれた場合であっても、撮像範囲内の顕微鏡画像に含まれるパターンの特徴に応じて測長位置が調整されるため、撮像範囲のずれによる測長誤差を最小限に抑えることが可能となる。
【実施例2】
【0052】
次に本発明の実施例2の画像測長装置について説明する。
【0053】
図8は同画像測長装置50の機能を説明するための機能ブロック図であり、図9は同画像測長装置50の機能を説明するための動作フローチャートである。
【0054】
この実施例2の画像測長装置50は上述の実施例1の画像測長装置50と同様の構成を有し、図8に示す如く、テンプレートマッチング部519及び領域移動部520が新たに加わっている。
【0055】
ここでも実施例1の場合同様、測長対象の顕微鏡画像として図4のものを想定する。
【0056】
図9中ステップS21で、顕微鏡画像中の画素の、各y座標におけるx方向に沿う階調値のラインプロファイルから階調値が極大となる2点を抽出することにより、各辺をなす点群を抽出する。
【0057】
次に、ステップS22で、テンプレートマッチング部519の機能として、予め用意しておいた基準となる、いわゆる教師画像と、測長対象の顕微鏡画像との間で、テンプレートマッチングを行う。このテンプレートマッチングの実施により、上記教師画像に対する測長対象の顕微鏡画像のずれ量を算出する。
【0058】
図10はこの場合の動作を説明するための図であり、同図(a)は基準となる測長基準画像30を示し、同図(b)は測長対象の顕微鏡画像35を示す。
【0059】
ここで図10(a)中の教師画像31は、同図(b)の測長対象の顕微鏡画像35と同じ画像サイズである測長基準画像30から切り出したものであり、画像サイズは測長対象の顕微鏡画像35のサイズの半分とされている。
【0060】
ここで教師画像31を切り出す際、画像とともに当該教師画像31の切り出し原点32の座標(XO1、YO1)を記憶しておく。同時に、測定基準画像30における所定の直線近似範囲33をY≦YU、直線近似範囲34をY≧YLとして記憶しておく。尚ここでx,y各座標の方向は、図10(a)の右下部分に示される方向とする。
【0061】
測長対象の顕微鏡画像35と教師画像31とのテンプレートマッチングにおいて、教師画像31と測定対象の顕微鏡画像35との相対位置を変化させながら画像間の類似度を測定する。そして画像間の類似度が最大となった際の教師画像31の原点32の、測定対象の顕微鏡画像35上の位置37(XO2、YO2)を求める。この場合、測定対象の顕微鏡画像35の教師画像31に対するx方向、y方向のずれ量が、両座標間の差、すなわちXO2−XO1、YO2−YO1として得られる。
【0062】
次に、ステップS23で、ステップS21で検出された点群の内、上記ずれ量を加味して得た直線近似範囲38、39(図10(b))に含まれる点群のみを使用し、顕微鏡画像に含まれるパターンの輪郭を構成する各辺部を直線近似する。ここで、上記ずれ量を加味して得る直線近似範囲38は、Y≦YU+(YO2−YO1)、直線近似範囲39はY≧YL+(YO2−YO1)として表される範囲である。
【0063】
これが領域移動部519の機能である。すなわちテンプレートマッチングの結果として得られた顕微鏡画像のずれ量に応じ、直線近似範囲38,39,すなわち近似線取得部513の機能によってパターンの輪郭を構成する各辺部を直線近似する際の対象となる点群の範囲を画定する矩形窓を顕微鏡画像上で移動することにより、同範囲を変更する。その結果当該直線近似の精度を効果的に向上可能である。
【0064】
すなわち図10の例では、図示の如く、画像中のパターンは、同図(a)に比して、同図(b)では撮像位置が若干上方向にずれている。すなわちパターンの上側の漏斗状の部分を見ると、図10(b)における方が、同図(a)におけるより、y方向により長く現れている。すなわち漏斗状の下端部分が下側にずれて写っている。
【0065】
このような場合、上記顕微鏡画像のずれ量は、y方向にプラスの量として得られる。したがって直線近似を行う点群を画定する矩形窓はそれぞれ下方向に移動される。その結果、図示の如く、上側の直線近似範囲38は測長基準画像30の直線近似範囲33に対し若干長く設定され、逆に下側の直線近似範囲39は測長基準画像30の直線近似範囲34に対し若干短く設定される。
【0066】
以降のステップS24〜ステップS28の動作は実施例1におけるステップS3〜S7の動作と同様であり、重複する説明を省略する。
【0067】
このように第2実施例では教師画像と測長対象の顕微鏡画像とのパターンマッチングを行い、パターンの輪郭を構成する各辺部の直線近似範囲を画定する矩形窓を、パターンマッチングで得られた、対応するパターンの教師画像に対するずれの分だけ顕微鏡画像上で移動させる。その結果高精度にパターンの輪郭を構成する各辺部の近似直線を求める際の対象となる点群の範囲を、より適切なものにすることが可能となる。その結果近似曲線の取得の精度を効果的に向上可能であり、決められた位置におけるパターンの測長の精度を向上させることが可能となる。
【実施例3】
【0068】
次に本発明の実施例3の画像測長装置について説明する。
【0069】
図11は同画像測長装置50の機能を説明するための機能ブロック図であり、図12は同画像測長装置50の機能を説明するための動作フローチャートである。
【0070】
この実施例3の画像測長装置50は上述の実施例1の画像測長装置50と同様の構成を有し、図11に示す如く、テンプレートマッチング部521及び最適アルゴリズム選択部522が新たに加わっている。
【0071】
実施例3では測長対象の画像群に、パターン形状やエッジコントラストが異なるA、B、Cの3種類の画像が含まれている状況を想定する。
【0072】
図12中ステップS41〜ステップS44で、顕微鏡画像に含まれるパターンの輪郭を構成する各辺部のエッジ点群を抽出し、基準点を得、測長位置を得る。これらの動作は実施例1におけるステップS1〜S4の動作と同様であり、重複する説明を省略する。
【0073】
次に、ステップS45で、テンプレートマッチング部521の機能として、測長対象の顕微鏡画像と、予め用意しておいた、上記A,B,Cの3種類にそれぞれ対応する教師画像A、B、Cのそれぞれとの間でテンプレートマッチングを行うことにより、測長対象の顕微鏡画像とこれら教師画像との間の類似度を算出する。ここで上記教師画像A、B、Cはそれぞれ上記画像種類A、B、Cを代表する画像とされる。
【0074】
上記ステップS45の結果として最も大きい類似度を有する教師画像がA,B,Cのいずれかであるかにより、測長対象の顕微鏡画像の画像種類がA、B、Cのいずれかであるかを判定する。
【0075】
次に、ステップS46で、最適アルゴリズム選択部522の機能として、予め用意しておいた、画像種類とエッジ検出アルゴリズムの対照表を参照し、当該顕微鏡画像の画像種類に最適なエッジ検出アルゴリズムを選択する。
【0076】
例えば、顕微鏡画像の画像種類がAであった場合、実施例1のステップS5に対応するステップS47におけるエッジ検出による測長動作中のエッジ検出において、図9に示す如く、顕微鏡画像の測長位置における画素の階調値の微分値を求め、微分値のラインプロファイル(同図中、微分値ラインプロファイル)において最大値と最小値とを求め、これらをエッジとして得るアルゴリズム、すなわち画素値の微分値のラインプロファイルにおいて最大値及び最小値を求める方法を選択する。
【0077】
他方顕微鏡画像の画像種類がBであった場合、図9中、顕微鏡画像の測長位置における画素の階調値のラインプロファイル(図9中、「階調値ラインプロファイル」)における極大値をエッジとして得るアルゴリズム、すなわち画素の階調値のラインプロファイルにおいて極大値を求める方法を選択する。
【0078】
又顕微鏡画像の画像種類がCであった場合、図9中、顕微鏡画像の測長位置における画素の階調値のラインプロファイルにおいて、階調値がある閾値を越える点を、階調値のラインプロファイルにおける極大値としての2点の中点を始点とし両側に向かって探索して求め、それらの点をエッジとして得るアルゴリズム、すなわち画素の階調値のラインプロファイルにおいて閾値により求める方法を選択する。
【0079】
ステップS47ではこのようにして選択されたアルゴリズムにより顕微鏡画像の測長位置におけるエッジ検出を行い、当該位置におけるパターンの幅を測長する。ステップS47〜ステップS49の動作は実施例1におけるステップS5〜S7の動作と同様であり、重複する説明を省略する。
【0080】
走査型電子顕微鏡で得られる顕微鏡画像では検査対象品上の凹凸形状、材質等の条件により、撮像時のエッジコントラストが大きく異なる場合がある。このような条件において得られた顕微鏡画像から精度良く測長を行うためには、各条件に応じて最適なエッジ検出アルゴリズムを適用する必要がある。
【0081】
従来はこの最適なエッジ検出アルゴリズムの選択を、操作者自身が判断して行っていた。それに対しこの実施例3の画像測長装置によれば、測長前の準備として、画像種類に応じた教師画像と対応する最適なエッジ検出アルゴリズムとの対照表を予め作成しておき、後の工程では、テンプレートマッチングの結果により自動的に最適なエッジ検出アルゴリズムを選択して適用するようにした。したがって大幅な測長工数の削減が実現できる。
【0082】
なおこのエッジ検出アルゴリズム、すなわちエッジ検出方法については、図21とともに後述する。
【実施例4】
【0083】
次に本発明の実施例4の画像測長装置について説明する。
【0084】
図14は同画像測長装置50の機能を説明するための機能ブロック図であり、図15は同画像測長装置50の機能を説明するための動作フローチャートである。
【0085】
この実施例3の画像測長装置50は上述の実施例1の画像測長装置50と同様の構成を有し、図14に示す如く、テンプレートマッチング部523及び類似度判定部524が新たに加わっている。
【0086】
実施例5では、まず図15中ステップS50で、テンプレートマッチング部523の機能として、測長対象の顕微鏡画像に対し、予め用意しておいた教師画像との間でテンプレートマッチングを行うことによって両画像間の位置合わせを行う。そのようにして双方間のずれの修正を行った上で、教師画像と測長対象の顕微鏡画像との間の類似度を算出する。
【0087】
次に、ステップS51で、類似度判定部524の機能として、予め用意しておいた類似度の閾値を参照し、得られた類似度がその閾値より大きい場合にはその後のステップS52〜ステップS56の測長動作を行う。ステップS52〜ステップS56の測長動作は実施例1におけるステップS1〜S5のものと同様であり、重複する説明を省略する。
【0088】
一方、類似度が閾値より小さい場合(ステップS51の「低い」)には、その顕微鏡画像が測長する必要のない別種の画像であると判断し、そのままステップS57に移動して他の顕微鏡画像の測長動作を行う動作を実施する。
【0089】
CD−SEMでの半導体ウエハの自動測長においては、視野移動の他にフォーカス合せも自動で行っているが、検査対象品の表面状態の違いなどによりフォーカスが合っていない状態で撮像してしまう場合が生じ得る。また、製造プロセスの途中で何らかの不具合があり、部分的、もしくは完全に測長対象の素子部分が破壊されるような場合も想定される。
【0090】
このように、CD−SEMによる撮像に係る顕微鏡画像には、当該画像に基づいてなされる上述の如くの測長処理に適さないもの、或いはその必要のないものが含まれている可能性がある。上述の実施例4の画像測長装置によれば、測長対象の画像群にそれら測長不適或いは不要の画像が含まれる場合にはそれらが測長工程から自動的に除外される。その結果無駄な測長処理の実施を省略することできるため、多数の測長対象の顕微鏡画像に対する処理を行う場合のトータルの測長工数を効果的に削減できる。
【実施例5】
【0091】
次に本発明の実施例5の画像測長装置について説明する。
【0092】
この実施例5では、CD−SEM100を制御しているコンピュータ110自体が画像測長装置として機能する。
【0093】
図16は同画像測長装置110の機能を説明するためのブロック図であり、図17は同画像測長装置110の機能を説明するための動作フローチャートである。
【0094】
この実施例5の画像測長装置110は、その測長動作を行う部分において上述の実施例1等による画像測長装置50と同様の構成を有する。この場合図16に示す如く、CD−SEM100を制御するパーソナルコンピュータ110自体が上記の如く画像測長装置として機能する。
【0095】
まず図17のステップS60で、当該コンピュータ110自体を監視する。そして、例えばステップS61にて、同コンピュータ110中の画像が格納されるディレクトリに存在されているファイル数を調べ、同ファイル数が増加した場合(ステップS61の「ある」)、ステップS62でその増加に係る顕微鏡画像に対する測長動作を行い、ステップS63にてその測長結果を出力する。上記ディレクトリ中の上記増加に係る顕微鏡画像の判別は、例えば、該当する画像ファイルのタイムスタンプを調べることによって可能である。
【0096】
ステップS62で行われる測長動作は上述の実施例1〜実施例4のそれぞれにおける測長動作、すなわち図3,図9,図12,図15のそれぞれの動作フローチャートとともに上述した測長動作のうちのいずれのものでもよい。ここでステップS62の工程には顕微鏡画像に含まれるパターンの輪郭を構成する各辺部をなす点群の抽出からエッジ検出によるパターン寸法の測長までの一連の動作が含まれるが、図11,図12とともに上述の実施例3における如くのエッジ検出アルゴリズムの自動選択機能を有するものとすることが望ましい。
【0097】
従来の画像測長装置では、測長作業を行う対象となる顕微鏡画像、もしくはその画像群を操作者が判断して指定する必要があった。その結果画像数が膨大である場合には、画像を選択する作業が画像測長作業の大半の工数を占めるような状況も想定される。本発明の実施例5の画像測長装置によれば、ほぼ完全に人手を介在させることなく自動的に測長動作が実行され、更に特に遅延時間を生じることなく、操作者は測長結果を知ることができる。
【0098】
すなわち実施例5によれば、CD−SEM100において検査対象品の顕微鏡画像の取得がなされ、これがコンピュータ110のハードディスク装置等の所定のディレクトリに保存されると、これが自動的に検出され、その新たな保存に係る顕微鏡画像に対する測長動作が自動的に開始される。したがって操作者は、顕微鏡画像の取得後に当該顕微鏡画像を前記所定のディレクトリに保存する操作を行うだけで、後は画像測長装置の機能により当該顕微鏡画像に対する測長動作が自動的に実行され、操作者はその結果を得ることができる。
【0099】
以上、本発明の各実施例について説明してきたが、本発明の実施例はこれらの構成、条件等に限られるものではなく、各種の変更が可能である。例えば上記各実施例では顕微鏡画像に含まれるパターンの輪郭を構成する各辺部を直線で近似しているが、曲線による近似としてもよい(図19とともに後述)。
【0100】
又上記実施例2においては、直線近似の対象の点群の範囲を画定する矩形窓を、パターンマッチングで得られたずれ量の分だけ移動しているが、このずれ量の算出は、パターンの輪郭を構成する各辺部をなす点群を検出する段階で行っても良い。
【0101】
又上記実施例3においては、テンプレートマッチングによる画像種類の判定によって最適なエッジ検出アルゴリズムを選択して適用している。これに対し、画像種類と最適なエッジ検出アルゴリズムと測長位置との対照表を予め用意しておくことにより、画像種類の判定の結果によって最適なエッジ検出アルゴリズムとともに測長位置をも得ることができる。そして当該測長位置において当該最適なエッジ検出アルゴリズムにより測長動作を行う構成としても良い。更に、テンプレートマッチングを行う工程は変更可能である。例えば、パターンの輪郭を構成する各辺部のエッジ点群を抽出する前の段階でテンプレートマッチングを行って最適なエッジ検出アルゴリズムを選択し、選択されたアルゴリズムを、パターンの輪郭を構成する各辺部のエッジ点群を抽出するアルゴリズムとして適用してもよい。
【0102】
図18は本発明の各実施例を構成するコンピュータ50又は110の構成を示すブロック図である。
【0103】
図18に示すごとく、同コンピュータ50又は110は、与えられたプログラムを構成する命令を実行することによって様々な動作を実行するためのCPU51と、キーボード、マウス等よりなりユーザが操作内容又はデータを入力するための操作部52と、ユーザにCPU51による処理経過、処理結果等を表示するCRT、液晶表示器等よりなる表示部53と、ROM、RAM等よりなりCPU54が実行するプログラム、データ等を記憶したり作業領域として使用されるメモリ54と,プログラム、データ等を格納するハードディスク装置55と、CD−ROM57を媒介として外部からプログラムをロードしたりデータをロードするためのCD−ROMドライブ56と、インターネット、LAN等の通信網59を介して外部サーバからプログラムをダウンロード等するためのモデム58とを有する。
【0104】
同コンピュータ50、110はCD−ROM57を媒介として、あるいは通信ネットワーク59を媒介として、上述の各実施例の画像測長装置が実行する測長動作等の処理、すなわち図3,図9,図12,図15のそれぞれの動作フローチャートによって示される動作をCPU51に実行させるための命令よりなるプログラムをロードあるいはダウンロードする。そしてこれをハードディスク装置55にインストールし、適宜メモリ54にロードしてCPU51が実行する。その結果、同コンピュータ50、110により画像測長装置が実現される。
【0105】
以下に上記各実施例における近似線取得部513における、顕微鏡画像に含まれるパターンの輪郭を構成する辺から近似線を求める場合の、直線近似以外の例について説明する。
【0106】
ここでは円(もしくは楕円)により近似する例を示す。
【0107】
図19(a)に示すようなパターンにおいて矢印部の幅wを測長したい場合、図19(b)の破線で囲ったそれぞれの曲線部を円弧で近似し、その中心(xc1、yc1)及び(xc2、yc2)の中点(x0、y0)=((xc1+xc2)/2、(yc1+yc2)/2)を上記基準点とする。
【0108】
この例では、基準点から距離dの位置を測長位置として規定し、y座標がy0+dの位置でx方向に沿ってエッジ検出を行うことにより上記幅wを測長する。
【0109】
次に上記近似線取得部513において、顕微鏡画像に含まれるパターンの輪郭を構成する辺の近似線を求めるためのハフ変換について説明する。
【0110】
ハフ(Hough)変換については、例えば田村秀行編「コンピュータ画像処理」(オーム社、2002)の204ページから206ページに以下の通り記載されている。
【0111】
すなわち、検出したい線の形が予め決められており、代数方程式でその形状が表現できる場合には、線の形状を表すパラメータ空間に画像中の特徴点(エッジ点など)を写像するハフ変換(Hough
Transform)が有効であるとされている。ここでは最も標準的である直線検出用ハフ変換について述べる。
【0112】
まず直線を表す代数方程式としては、
ρ=xcosθ+ysinθ ...(B−1)
を用いる。
【0113】
上式中、ρは座標原点から直線に下ろした垂線の長さ、θは垂線とx軸との間の角度を表すパラメータである。この代数方程式を用いると、図20(a)に示すx−y画像空間中の直線ρ0=x0cosθ+y0sinθは、図20(b)に示すρ−θパラメータ空間中の1点として表される。
【0114】
また、画像中の特徴点(x0、y0)を通る任意の直線は
ρ=x0cosθ+y0sinθ ...(B−2)
と表され、この式を満たす直線群図20(c)は、パラメータ空間中で図20(d)のような軌跡を形作る。
【0115】
見方を変えると、このことは、画像空間中の点(x0、y0)が式(B−2)で表されるパラメータ空間中の軌跡に写像されることを意味する。
【0116】
こうした画像空間とパラメータ空間との関係に基づき、ハフ変換では次のようにして直線検出を行う。
【0117】
1)パラメータ空間を表す2次元配列を用意し、その値をすべて0に初期化する。
【0118】
2)画像中の各特徴点の座標値を式(B−1)のx、yに代入した式を、ρとθに関する方程式とみなし、パラメータ空間中でその方程式の表す軌跡を描く(図20(e)参照)。
【0119】
軌跡の描画は、θを一定間隔Δθずつ増加させながら方程式を満たすρの値を計算することによって軌跡の通過する配列要素を求め、その値を1増やす(投票する)ことによって軌跡を重ね書きする。
【0120】
3)すべての特徴点に対応する軌跡を描いた後、多数の軌跡が集中している位置、すなわち、パラメータ空間を表す配列中で大きな極大値をもつ要素を求める。
【0121】
そうした要素が表すパラメータを(ρ*、θ*)とする。このパラメータは画像中の直線ρ*=xcosθ*+ysinθ*を表し、多数の特徴点を通る直線が検出されたことになる(図20(e)、(f)参照)。
【0122】
ハフ変換は、画像中の特徴点が連続していなくてもうまく直線が検出でき、エッジの追跡などに比べて雑音にも強いとされている。このようにハフ変換は優れた特性をもっており、最初に提案された1962年以来非常に多くの改良、拡張がなされている。
【0123】
ハフ変換は、直線のほか、円や楕円の検出にも利用できる。ただし、円の場合はパラメータが3つ、楕円の場合は5つ必要であり、単純は方法では、それぞれ3次元、5次元の配列を用意する必要があり、記憶容量、計算時間ともにかなり大きくなるという問題があるとされている。
【0124】
この問題に対しても種々の工夫が考えられている。また、多角形など単純な代数方程式では表現できない2次元図形を検出するための方法として一般化ハフ変換がある。さらに、3次元の平面や物体の検出・認識にもハフ変換の考え方を利用することができる。
【0125】
次にエッジ抽出部512或いはエッジ検出部516によるエッジ検出のための方法について述べる。
【0126】
エッジ検出方法については、例えば社団法人、日本半導体製造装置協会のホームページにおけるロードマップ(平成15年度)(URL:http://www.seaj.or.jp/rdmp/indx_f.htm、2006年10月12日現在)の第5編「計測」に示されている。
【0127】
すなわち、顕微鏡画像の画素の階調値のラインプロファイルを使用するものとして実際にCD−SEMに適用されているものとしては図21に示される各方式がある。又一般的には、他にも多数の方法があり、図13とともに説明した如く、微分値のラインプロファイルを使用する方法もある。図21中、Lは測長値を示し、Aは実際のパターン幅を示す。
【0128】
本発明は以下の付記の各々に記載の構成をとり得る。
(付記1)
与えられたパターンを構成する点群から近似線を求める近似線取得手段と、
前記近似線から所定の演算によって基準点を求める基準点取得手段と、
前記基準点から所定の演算によって測長位置を求める測長位置取得手段と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定手段とよりなるパターン寸法測定装置。
(付記2)
前記近似線取得手段は、前記点群を一又は複数の直線で近似する手段よりなる付記1に記載のパターン寸法測定装置。
(付記3)
前記近似線取得手段は、前記点群を一又は複数の所定の曲線で近似する手段よりなる付記1に記載のパターン寸法測定装置。
(付記4)
前記曲線は円弧とされてなる付記3に記載のパターン寸法測定装置。
(付記5)
前記近似線取得手段は、前記点群を、所定の関数で表される直線又は曲線で近似する手段よりなる付記1に記載のパターン寸法測定装置。
(付記6)
前記近似線取得手段は、ハフ変換を用いて近似線を求める構成とされてなる付記1乃至5のうちのいずれかに記載のパターン寸法測定装置。
(付記7)
前記基準点取得段階は、近似線取得段階で得られた近似線同士の交点に基づいて基準点を求める構成とされてなる付記1乃至6のうちの何れか一項に記載のパターン寸法測定装置。
(付記8)
前記近似線取得手段は、前記与えられたパターンを構成する点群のうち所定の領域に属する点群を対象とするものとされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する手段を含む構成とされてなる付記1乃至7のうちのいずれかに記載のパターン寸法測定装置。
(付記9)
前記寸法測定手段は、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる付記1乃至8のうちのいずれかに記載のパターン寸法測定装置。
(付記10)
前記所定の複数の方法は、画素値の微分値のラインプロファイルにおいて最大値及び最小値を求める方法、画素の階調値のラインプロファイルにおいて極大値を求める方法及び画素の階調値のラインプロファイルにおいて閾値により求める方法を含む構成とされてなる付記9に記載のパターン寸法測定装置。
(付記11)
更に前記近似線取得手段による近似線を求める動作が実行される前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作を実行しない構成とされてなる付記1乃至10のうちのいずれかに記載のパターン寸法測定装置。
(付記12)
前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作はコンピュータによる制御によって自動的に実行される構成とされ、
前記与えられたパターンの画像を撮像によって得る撮像手段によって得られた画像を保存する画像保存手段による画像の保存を検出する保存検出手段を有し、
前記保存検出手段による画像の保存が検出されたことを契機として、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作が自動的に開始される構成とされてなる付記1乃至11のうちのいずれかに記載のパターン寸法測定装置。
(付記13)
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とよりなるパターン寸法測定方法。
(付記14)
前記近似線取得段階は、前記与えられたパターンを構成する点群のうち、所定の領域に属する点群を対象としてなされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する段階を含む構成とされてなる付記13に記載の方法。
(付記15)
前記寸法測定段階では、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる付記13又は14に記載の方法。
(付記16)
更に前記近似線取得段階の前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記一連の近似線取得段階、基準点取得段階、測長位置取得段階及び寸法測定段階を実行しない構成とされてなる付記13乃至15のうちのいずれかに記載の方法。
(付記17)
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とをコンピュータに実行させるための命令よりなるプログラム。
(付記18)
前記近似線取得段階は、前記与えられたパターンを構成する点群のうち、所定の領域に属する点群を対象としてなされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する段階をコンピュータに実行させるための命令を含む構成とされてなる付記17に記載のプログラム。
(付記19)
前記寸法測定段階では、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる付記17又は18に記載のプログラム。
(付記20)
更に前記近似線取得段階の前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記一連の近似線取得段階、基準点取得段階、測長位置取得段階及び寸法測定段階を実行しない構成とされてなる付記17乃至19のうちのいずれかに記載のプログラム。
【産業上の利用可能性】
【0129】
本発明の適用例としては、上述の如くの半導体装置、ハードディスク装置などの製造工程における走査型電子顕微鏡画像に対するパターン測長に限られない。例えば本発明は顕微鏡画像を扱う全ての産業において適用可能である。又測長対象画像を得るための撮像装置としては上記走査型電子顕微鏡に限られず、光学顕微鏡、CCDカメラ、透過型電子顕微鏡等でもよく、本発明はこれらで撮像した画像に含まれるパターンの測長にも適用可能である。
【図面の簡単な説明】
【0130】
【図1】本発明の実施例による画像測長装置について説明するためのブロック図である。
【図2】本発明の実施例1による画像測長装置の機能を説明するための機能ブロック図である。
【図3】本発明の実施例1による画像測長装置の動作を説明するための動作フローチャートである。
【図4】本発明の実施例による画像測長装置の測長対象の一例の画像を示す図である。
【図5】本発明の実施例1による画像測長装置による測長方法について説明するための図である。
【図6】図4に示す画像における階調値のラインプロファイルの例を示す図である。
【図7】本発明の実施例1による画像測長装置の機能について説明するための図である。
【図8】本発明の実施例2による画像測長装置の機能を説明するための機能ブロック図である。
【図9】本発明の実施例2による画像測長装置の動作を説明するための動作フローチャートである。
【図10】本発明の実施例2による画像測長装置における測長位置の位置決め手順を説明するための図である。
【図11】本発明の実施例3による画像測長装置の機能を説明するための機能ブロック図である。
【図12】本発明の実施例3による画像測長装置の動作を説明するための動作フローチャートである。
【図13】本発明の実施例3による画像測長装置におけるエッジ検出アルゴリズムを説明するための図である。
【図14】本発明の実施例4による画像測長装置の機能を説明するための機能ブロック図である。
【図15】本発明の実施例4による画像測長装置の動作を説明するための動作フローチャートである。
【図16】本発明の実施例5による画像測長装置の機能を説明するためのブロック図である。
【図17】本発明の実施例5による画像測長装置の動作を説明するための動作フローチャートである。
【図18】本発明の実施例による画像測長装置をコンピュータで実現する場合の当該コンピュータの構成を説明するためのブロック図である。
【図19】本発明の実施例による画像測長装置において適用可能な、与えられたパターンの輪郭を円弧で近似する方法について説明するための図である。
【図20】ハフ変換について説明するための図である。
【図21】エッジ検出方法について説明するための図である。
【符号の説明】
【0131】
10 斜め辺の近似範囲の境界線
11、33、38 斜め辺の近似範囲
12、34、39 垂直辺の近似範囲
13、14 斜め辺の近似直線
15、16 垂直辺の近似直線
17、18 斜め近似直線と垂直近似直線の交点
19 測長の基準点
20 測長位置例
30 測長基準画像
31 教師画像切り出し範囲
32 教師画像切り出し原点
35 測長対象の顕微鏡画像
36 テンプレートマッチングにより検出された領域
37 テンプレートマッチングにより検出された領域の原点
50 画像測長装置
100 CD−SEM
511 画像取得部
512 エッジ抽出部
513 近似線取得部
514 基準点取得部
515 測長位置取得部
516 エッジ検出部
517 測長部
518 結果出力部
519、521、523 テンプレートマッチング部
520 領域移動部
522 最適アルゴリズム選択部
524 類似度判定部
【特許請求の範囲】
【請求項1】
与えられたパターンを構成する点群から近似線を求める近似線取得手段と、
前記近似線から基準点を求める基準点取得手段と、
前記基準点から測長位置を求める測長位置取得手段と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定手段とよりなるパターン寸法測定装置。
【請求項2】
前記近似線取得手段は、前記与えられたパターンを構成する点群のうち、所定の領域に属する点群を対象とするものとされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する手段を含む構成とされてなる請求項1に記載のパターン寸法測定装置。
【請求項3】
前記寸法測定手段は、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる請求項1又は2に記載のパターン寸法測定装置。
【請求項4】
更に前記近似線取得手段による近似線を求める動作が実行される前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作を実行しない構成とされてなる請求項1乃至3のうちのいずれか一項に記載のパターン寸法測定装置。
【請求項5】
前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作はコンピュータによる制御によって自動的に実行され、
前記与えられたパターンの画像を撮像によって得る撮像手段によって得られた画像を保存する画像保存手段による画像の保存を検出する保存検出手段を有し、
前記保存検出手段によって前記画像保存手段による画像の保存が検出されたことを契機として、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作が自動的に開始される構成とされてなる請求項1乃至4のうちのいずれか一項に記載のパターン寸法測定装置。
【請求項6】
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とよりなるパターン寸法測定方法。
【請求項7】
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とをコンピュータに実行させるための命令よりなるプログラム。
【請求項1】
与えられたパターンを構成する点群から近似線を求める近似線取得手段と、
前記近似線から基準点を求める基準点取得手段と、
前記基準点から測長位置を求める測長位置取得手段と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定手段とよりなるパターン寸法測定装置。
【請求項2】
前記近似線取得手段は、前記与えられたパターンを構成する点群のうち、所定の領域に属する点群を対象とするものとされ、
前記所定の領域を、前記与えられたパターンと所定の基準パターンとのパターンマッチングの結果に基づいて移動する手段を含む構成とされてなる請求項1に記載のパターン寸法測定装置。
【請求項3】
前記寸法測定手段は、前記パターンの所定の部分の寸法を測定するにあたって当該部分のエッジの位置を求める際のエッジ検出方法を、当該パターンを構成する画素値の当該部分における変化の態様により、所定の複数の方法から選択する構成とされてなる請求項1又は2に記載のパターン寸法測定装置。
【請求項4】
更に前記近似線取得手段による近似線を求める動作が実行される前に、前記与えられたパターンにつき、所定の基準パターンとパターンマッチングを行い、当該所定の基準パターンとの相関が所定の値より小さい際には、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作を実行しない構成とされてなる請求項1乃至3のうちのいずれか一項に記載のパターン寸法測定装置。
【請求項5】
前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作はコンピュータによる制御によって自動的に実行され、
前記与えられたパターンの画像を撮像によって得る撮像手段によって得られた画像を保存する画像保存手段による画像の保存を検出する保存検出手段を有し、
前記保存検出手段によって前記画像保存手段による画像の保存が検出されたことを契機として、前記近似線取得手段、基準点取得手段、測長位置取得手段及び寸法測定手段による一連の動作が自動的に開始される構成とされてなる請求項1乃至4のうちのいずれか一項に記載のパターン寸法測定装置。
【請求項6】
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とよりなるパターン寸法測定方法。
【請求項7】
与えられたパターンを構成する点群から近似線を求める近似線取得段階と、
前記近似線から基準点を求める基準点取得段階と、
前記基準点から測長位置を求める測長位置取得段階と、
前記測長位置で前記パターンの所定の部分の寸法を測定する寸法測定段階とをコンピュータに実行させるための命令よりなるプログラム。
【図1】


【図2】
【図3】
【図6】
【図7】

【図8】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】
【図21】

【図4】
【図5】
【図10】

【図2】
【図3】
【図6】
【図7】
【図8】
【図9】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図4】
【図5】
【図10】
【公開番号】特開2008−116206(P2008−116206A)
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願番号】特願2006−296853(P2006−296853)
【出願日】平成18年10月31日(2006.10.31)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成20年5月22日(2008.5.22)
【国際特許分類】
【出願日】平成18年10月31日(2006.10.31)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]