
位置情報収集装置、位置情報収集システム及び位置情報収集プログラム
【課題】ナビゲーション装置が、車両の位置及び経路情報を、正確に、かつ低コストで収集し、広く活用することを可能にする。
【解決手段】車両100の位置情報を有効に収集・活用するために、ナビゲーション装置1から位置情報を位置情報サービスセンタ10に送信する。その際に、定期間隔での位置情報の送信と合わせて、大きな方向変位があった場合、又は所定のポイント位置への接近の場合にも位置情報を送信する。ジャイロセンサ部8によって車両100の左右、上下の方向変位を測定し、右左折などの車両100の方向変位があった場合に位置情報を送信する。
【解決手段】車両100の位置情報を有効に収集・活用するために、ナビゲーション装置1から位置情報を位置情報サービスセンタ10に送信する。その際に、定期間隔での位置情報の送信と合わせて、大きな方向変位があった場合、又は所定のポイント位置への接近の場合にも位置情報を送信する。ジャイロセンサ部8によって車両100の左右、上下の方向変位を測定し、右左折などの車両100の方向変位があった場合に位置情報を送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の位置情報を収集する位置情報収集システムに関するものである。
【背景技術】
【0002】
位置情報収集システムでは従来、GPSによる位置情報を取得し、更に、各種通信手段により位置情報サービスセンタへ位置情報を送信するナビゲーション装置を車両に搭載していた。そのナビゲーション装置は、予め設定された時間間隔に従ってセンタに位置情報を送信していた。
【0003】
ここで、特開平5−233996(特許文献1)には、道路交通状況予測システムが開示されている。特許文献1の道路交通状況予測システムは、車両に搭載された運行データ通報装置が、人工衛星からの信号により自己の位置を認識し、一定距離毎に或いは一定時間毎に、自己の位置を親局に送信する技術が開示されている。
【0004】
また、特開2002−99982(特許文献2)には、道路交通管理方式が開示されている。特許文献2に記載の道路交通管理方式では、道路交通管理センタと車両に搭載したナビゲーション装置との間で通信が行われ、ナビゲーション装置が通過予定経路情報という形で情報の送信を行うことが開示されており、通過予定経路の設定又は変更が必要なときのみの情報送信を行うことが開示されている。
【0005】
更に、特開2010−9443(特許文献3)には、自車両外部装置に位置情報を送信し、通信費を節約した車載装置が開示されている。特許文献3に記載の車載装置と外部装置を有する車両運行管理システムでは、車載装置が、車両の位置情報を取得する位置情報取得手段と、車両の進行方向の変化を検知する走行状態検知手段を備え、走行状態検知手段で検知した車両の進行方向が所定値以上変化した場合、位置情報取得手段で取得した位置情報を外部装置へ送信することが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平5−233996号公報
【特許文献2】特開2002−99982号公報
【特許文献3】特開2010−9443
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の位置情報収集システムは、ナビゲーション装置で予め設定された位置情報送信の時間間隔が、通信料金と位置情報精度の兼ねあいから決められることが多く、通信料金を抑えることとすると、センタへ位置情報を送信する時間間隔を長くする必要があった。特許文献3では、GPS受信手段が検出した車両の移動に伴う緯度、経度の変化と時刻の変化との関係から、車両の進行方向の変化を検出し、検出の都度、GPSからの位置情報を送信するものが記載されている。
【0008】
しかしながら、特許文献3による車両運行管理システムでは、位置情報の送信の時期を、一定間隔の送信と、車両の進行方向の変化の検出の都度の両方であるため、送信の頻度の減少は少なく、通信料の削減の実効は薄いものである。
【0009】
更に、車両の位置情報収集システムにとって、実際の車両の動作を考慮すると、例えば、高速道路におけるサービスエリア内のように限られた領域内では、車両の進行方向の変化はあまり重要ではなく、そのため、無駄な情報を送信しているという問題があった。
【0010】
本発明が解決しようとする課題は、車両の位置情報を送信するのに、通信料金を抑えるとともに、位置情報精度の向上を図った位置情報収集システムを得ることにある。即ち、本発明は、位置情報サービスセンタへ位置情報を送信するのに、予め設定された時間間隔と、車両の進行方向の変化の検出の都度と、更に予め設定したポイント位置に近づいたことの検出の都度とすることにより、位置情報サービスセンタへの位置情報の送信の頻度を最小限とし、かつ位置情報サービスセンタは正確な道路走行のトレースを行うことができる位置情報収集システムを得ることである。
【課題を解決するための手段】
【0011】
上記問題を解決するために本発明に関する位置情報収集装置は、車両に搭載され、車両の位置情報を測定する現在位置測定手段と、車両の走行に基づいた方向変位を測定する方向変位測定手段と、前記現在位置測定手段が測定する車両の前記位置情報をセンタに送信する無線送信手段と、予め設定したポイント位置のポイント位置情報を格納するポイント記録部を有し、更に、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに定期間隔で送信し、かつ前記方向変位測定手段により測定した方向変位が一定の閾値を超えた場合、又は前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに送信し、更に前記無線送信手段に対し、前記定期間隔での送信を一定時間抑止するように制御する制御部を有することを特徴とするものである。
【発明の効果】
【0012】
本発明の位置情報収集システムによれば、車両の右左折や坂道を検知し、予め決められたポイント位置への接近を検知するようにすれば、予め設定された定期間隔以外にも、位置情報サービスセンタへ位置情報を送信することが可能となる。そして、方向変位やポイント位置への接近により位置情報を送信した後は、定期間隔に位置情報を送信することを抑止することにより、送信頻度を減少することができる。そして、取得した位置情報は、交通流の分析・運行ルート・時間の検討などに使用可能な情報となる。これらの情報はナビゲーション装置側からの自律的な送信により取得可能なため、道路トレースの精緻化のために定期間隔を短くする必要がなく、位置情報を送信する際の通信料金を抑えられるという利点がある。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態に関する位置情報収集システムのブロック図である。
【図2】第1の実施の形態に関するナビゲーション装置のブロック図ある。
【図3】第1の実施の形態に関する位置情報サービスセンタの信号の流れの説明図 である。
【図4】第1の実施の形態に関するナビゲーション装置の動作のフローチャートである。
【図5】第1の実施の形態に関する車両の左右方向変位の説明図である。
【図6】第1の実施の形態に関する車両の左右方向変位の判定の説明図である。
【図7】第1の実施の形態に関する車両の上下方向変位の説明図である。
【図8】第1の実施の形態に関する車両の上下方向変位の判定の説明図である。
【図9】第1の実施の形態に関するナビゲーション装置の動作のフローチャートである。
【図10】第1の実施の形態に関するナビゲーション装置の動作のフローチャートである。
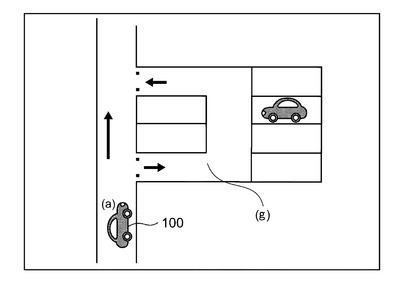
【図11】第1の実施の形態に関する車両とポイント位置の関係を示す説明図である。
【発明を実施するための形態】
【0014】
<第1の実施の形態>
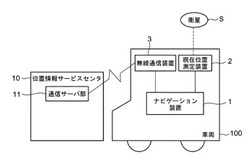
図1は、第1の実施の形態に関する位置情報収集システムのブロック図である。位置情報収集システムは、車両100に搭載されるナビゲーション装置1と、ナビゲーション装置1に接続された現在位置測定装置2及び無線通信装置3を含み、車両100から遠隔の場所に設置された位置情報サービスセンタ10からなる。
【0015】
現在位置測定装置2は、衛星Sからの電波を受信する図示しないGPSアンテナを含み、車両100の現在位置を測定する。現在位置測定装置2は、受信した電波から緯度経度からなる現在位置を計算し、計算した現在位置をナビゲーション装置1に出力する。無線通信装置3はナビゲーション装置1の指示により、車両100の位置情報を無線回線を通じて位置情報サービスセンタ10に対し送信する。なお、GPS(グローバルポジショニングシステム)は、地球上にある20数個の衛星Sより電波さえ受信できれば24時間いつでも緯度経度を出力することができ、簡単に現在位置を割り出すことのできる電波航法の一種である。
【0016】
位置情報サービスセンタ10は、車両100から遠隔の場所に設置され、車両100と無線回線を通じて通信可能となっている。位置情報サービスセンタ10の内部に設置された通信サーバ部11は、車両100の無線通信装置3と通信を行い、車両100から位置情報を受信する。更に、位置情報サービスセンタ10は、受信した位置情報を、交通流の分析、運行ルートや時間の検索などの目的に応じて処理し活用する。
【0017】
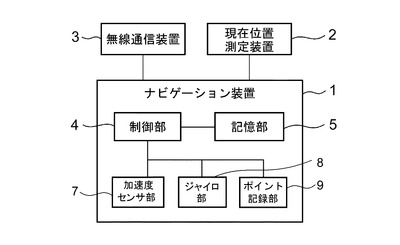
図2は、第1の実施の形態に関するナビゲーション装置1のブロック図ある。ナビゲーション装置1に内蔵された制御部4は、記憶部5に格納された位置情報収集発呼ソフトウェアを動作させることにより、ナビゲーション装置1の各部を制御する。
【0018】
前記制御部4は、前記位置情報収集発呼ソフトウェアを用いて、前記現在位置測定装置2から取得した情報と、加速度センサ部7と方向変位測定手段としてのジャイロセンサ部8からの情報とを合わせて位置情報を作成する。更に、制御部4は、現在位置測定装置2から取得した情報から定期間隔毎に位置情報を作成する。制御部4は、作成した位置情報を無線通信装置3を介して位置情報サービスセンタ10に送信する。更に、制御部4は、車両100の位置情報が、予め初期設定されたポイント位置のポイント位置情報の一定の範囲内(例えば距離に換算して10メートル以内)となるかどうか判定する。初期設定されたポイントとしては、例えば、後に図11に示す説明図における高速道路のサービスエリア(g)である。
【0019】
前記制御部4は、ナビゲーション装置1の電源のオンともに位置情報を取得して、その位置情報を位置情報サービスセンタ10に送信する。その後も、定期間隔(例えば1分)毎に位置情報の更新情報を送信する。更に、定期間隔毎の送信タイミングに加えて、車両100の走行に基づき、所定の走行状態のときに自律的に位置情報を送信する。所定の走行状態のときとは、車両100の走行方向が左右方向又は上下方向に所定の方向変位があった場合、及び車両100の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合である。
【0020】
なお、制御部4は、所定の方向変位がなくても、定期間隔毎に位置情報を送信するが、ここで、方向変位による位置情報の送信後、所定時間(例えば5秒)が経過していない場合は、定期間隔の位置情報の送信(更新)を抑止する。これは、このような場合に定期間隔による位置情報の更新を抑止しても、位置情報の精度に問題が少なく、その分通信料金を抑えられるからである。また、車両100の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合に位置情報を送信するときも同様である。
【0021】
加速度センサ部7は、タイヤの回転に基づいて車両100の加速度及び走行速度を測定する装置である。加速度センサ部7は、加速度を検知し車両100が走行しているか停止しているか、及び走行している場合の速度の情報を収集し、制御部4に出力する。
【0022】
方向変位測定手段としてのジャイロセンサ部8は、走行中の車両100の走行方向を測定する装置である。東西南北の方向及び上下方向を検知し、それらの情報を制御部4に送信する。ポイント記録部9は、初期設定した緯度経度からなるポイント情報を記録する。
【0023】
ポイント記録部9は、初期設定した緯度経度からなる複数の位置情報、例えば図11に示す高速道路のサービスエリア(g)の緯度経度を記録する。制御部4は、現在位置測定装置2が取得した位置情報が、ポイント記録部9にある位置情報に初期設定された範囲内(例えば距離に換算して10メートル以内)にあるかどうか判定する。無線通信装置3は、制御部4が生成した位置情報(日付、時刻、緯度経度、速度、方位、高度)を自律的に位置情報サービスセンタ10へ送信する。
【0024】
無線通信装置3は、制御部4の制御により、制御部4が生成した位置情報(日付、時刻、緯度経度、速度、方位、高度)を位置情報サービスセンタ10へ送信する。位置情報としては、年月日、時分秒、緯度経度、速度、方向、海抜であり、例えば、「2009年12月22日、am10:05:00、北緯35度41分25秒、東経139度45分36秒、35.5km/h、方位角75.8度、海抜6.0m」のようになる。なお、年月日、時分秒の情報は、図示しないタイマー手段によって取得する。
【0025】
図3は、第1の実施の形態に関する位置情報サービスセンタ10の信号の流れの説明図である。位置情報サービスセンタ10の通信サーバ部11は、ナビゲーション装置1から無線通信装置3を介して位置情報を受信し、DBサーバ部12に送信する。また、通信サーバ部11はネットワークを介して、携帯電話21やパソコン22と接続している。更に、通信サーバ部11は、APサーバ部14及びWebサーバ部15とも接続し、情報の送受信を行う。
【0026】
DBサーバ部12は、通信サーバ部11から送信される車両100の位置情報を格納する。地図サーバ部13は、位置情報収集システムに用いられる地図情報を格納する。APサーバ部14は、DBサーバ部12に格納された車両100の位置情報や地図サーバ部13に格納された地図情報を加工し、携帯電話21やパソコン22から要求される情報を作成する。Webサーバ部15は、情報の形式を携帯電話21やパソコン22で利用可能な形式に変換する。
【0027】
ここで、地図サーバ部13は、APサーバ部14からのリクエストがあると、格納している地図情報をAPサーバ部14に送信する。APサーバ部14は、携帯電話21やパソコン22のリクエストにより、対象車両100の位置情報をDBサーバ部12から読み出し、読み出した位置情報を基に地図サーバ部13から該当地域の地図情報を読み出し、地図上に車両100の位置情報をマッピングする。更に、車両100の位置情報をマッピングした地図情報を、Webサーバ部15に送信する。Webサーバ部15は、位置情報を携帯電話21やパソコン22で表示可能な形式に変換し、通信サーバ部11に送信する。通信サーバ部11は、Webサーバ部15から受信した前記地図情報を、携帯電話21やパソコン22へ送信する。
【0028】
このようにして、位置情報サービスセンタ10では、正確な車両100の位置情報や経路情報を、地図情報にマッピングした形で、リクエストのあった携帯電話21やパソコン22に提供することができる。
【0029】
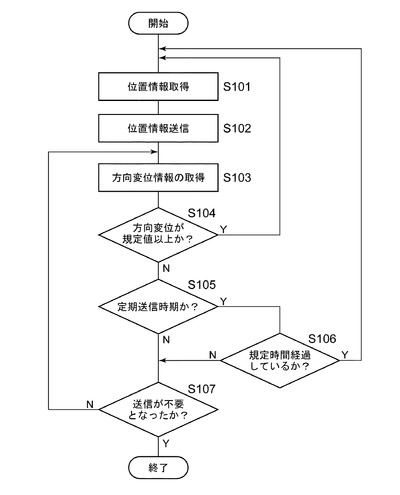
図4は、第1の実施の形態に関するナビゲーション装置1の動作を示すフローチャートである。これを参照して、ナビゲーション装置1の方向変位時の位置情報の送信動作を説明する。
【0030】
S101:ナビゲーション装置1の制御部4は、電源オンとともに、現在位置測定装置2を制御することにより、車両100の位置情報を取得する。
【0031】
S102:制御部4は、取得した位置情報を無線通信装置3へ出力する。無線通信装置3は、制御部4の制御により、無線回線を通じて前記位置情報を位置情報サービスセンタ10の通信サーバ部11へ送信する。その後、車両100の位置情報を送信する送信タイミングは、ナビゲーション装置1の制御部4が初期設定で定めた定期間隔(例えば1分)毎とする。このようにして位置情報の更新を定期間隔で行う。ここでは、位置情報の更新について、定期間隔毎の送信タイミングに加えて、車両100が左右方向又は上下方向に所定の方向変位があった場合に位置情報を送信する。この位置情報の送信は、次に説明する方向変位のときに行う。所定の方向変位は、位置情報を更新する条件となる。
【0032】
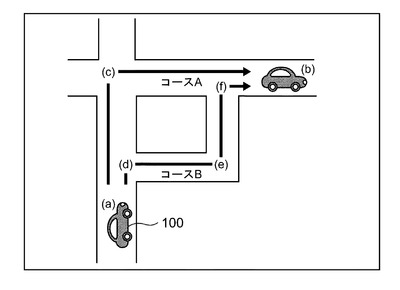
図5は第1の実施の形態に関する車両100の左右方向変位の説明図であり、図6は第1の実施の形態に関する車両100の左右方向変位の判定の説明図である。図5に示す車両100の右折の例をとってみると、GPSでの位置情報取得ポイント、即ち定期間隔の送信タイミングにおける車両100の位置が、地点(a)と地点(b)であった場合とする。この場合、位置情報サービスセンタ10としては、車両100が地点(a)(c)(b)のコースAを走行したのか、地点(a)(d)(e)(f)(b)のコースBを走行したのか分からない。しかしながら、右折点(c)の位置情報があれば車両100はコースAを走行したことが分かる。また、右左折点(d)、(e)、(f)の位置情報があれば、車両100はコースBを走行したことが分かる。
【0033】
この場合、送信タイミングの定期間隔を短くすれば、右折点(c)や右左折点(d)、(e)、(f)に近い位置情報を得ることができるが、通信料金が増大することとなる。一方、右折点(c)や右左折点(d)、(e)、(f)における方向変位が把握できれば、コースA及びコースBの判定をすることができる。このように、車両100の方向変位がコース判定の重要ポイントとなる。
【0034】
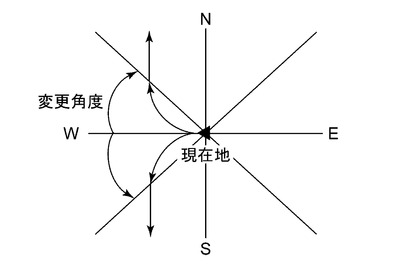
図6において、車両100が東から西へ走行中、右左折変位それぞれ変更角度が45度を超える場合、所定の方向変位があったとして、位置情報を更新することとする。
【0035】
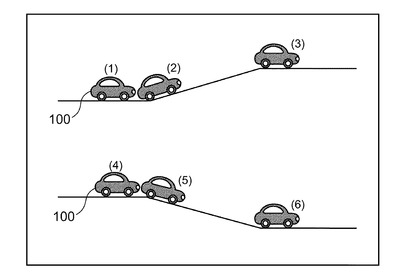
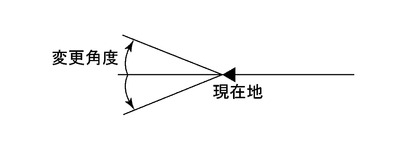
また、図7は第1の実施の形態に関する車両100の上下方向変位の説明図であり、図8は第1の実施の形態に関する車両100の上下方向変位の判定の説明図である。ここで、図7に示すように、車両100が坂道を上る場合は地点(1)(2)(3)を走行し、坂道を下る場合は地点(4)(5)(6)を走行する。図8において、車両100が右から左に走行中、上り坂又は下り坂を走行する上下方向変位がそれぞれ変更角度が22.5度を超える場合、所定の方向変位があったとして位置情報を更新することとする。
【0036】
S103:制御部4はジャイロセンサ部8を制御することにより、車両100の方向変位、即ち、左右方向変位と上下方向変位を測定し方向変位情報を取得する。
【0037】
S104:制御部4は、ジャイロセンサ部8から取得した方向変位情報が、図6に示すように車両100の左右方向変位が所定の規定値(例えば角度45度)以上か又は図8に示すように車両100の上下方向変位が所定の規定値(例えば22.5度)以上か判定する。ステップ104の判定で規定値を越えた場合に、制御部4は方向変位があったと判定し、再度、現在位置測定装置2を制御することにより位置情報を取得する(S101)。制御部4は、取得した位置情報を無線通信装置3へ送信し、無線通信装置3は、無線回線を通じて前記位置情報をサービスセンタ10の通信サーバへ送信する(S102)。
【0038】
S105:ステップ104において規定以上の方向変位がない場合、制御部4は、定期間隔毎に位置情報を送信するために、定期送信時期かどうかを判定する。
【0039】
S106:ステップ105において定期送信の時期に到達していた場合、制御部4は、方向変位による位置情報送信後、所定時間(例えば5秒)を経過しているか判断する。所定時間(例えば5秒)を経過している場合はステップ101に戻る。所定時間(例えば5秒)を経過していない場合は、定期間隔の位置情報送信を抑止する。これにより、情報の精度を維持して通信コストを低減する効果が得られる。
【0040】
S107:ステップ105において定期送信時期でない場合、及びステップ106において所定時間を経過していない場合は、最終的に制御部4は、車両100の運行終了などで位置情報の送信が不要になったか判断する。送信不要になった場合はこの動作を終了する。
【0041】
図9は、第1の実施の形態に関するナビゲーション装置1の動作のフローチャートである。これを参照して、ナビゲーション装置1のポイント位置情報の送信動作を説明する。
【0042】
S201:前記と同様にナビゲーション装置1の制御部4は、電源オンとともに現在位置測定装置2を制御することにより、車両100の位置情報を取得する。
【0043】
S202:制御部4は、取得した位置情報を無線通信装置3へ出力する。無線通信装置3は、無線回線を通じて前記位置情報を位置情報サービスセンタ10の通信サーバ部11へ送信する。その後、車両100の位置情報を送信する送信タイミングは、ナビゲーション装置1の制御部4が初期設定で定めた定期間隔(例えば1分)毎とする。このようにして位置情報の更新を定期間隔で行う。
【0044】
S203:制御部4は、現在位置測定装置2を制御して適時に車両100の位置情報を取得する。
【0045】
S204:制御部4は、ステップ203で取得した車両100の位置情報がポイント記録部9に初期設定されたポイント情報の範囲内であるかどうかを判定する。制御部4は、もし前記位置情報が前記ポイント情報の範囲内であれば、再度、現在位置測定装置2を制御して位置情報を取得する(S201)。制御部4は、取得した位置情報を無線通信装置3を介して、位置情報サービスセンタ10へ送信する(S202)。
【0046】
S205:次に制御部4は、初期設定されたポイント記録部9の範囲でない場合、定期間隔毎に位置情報を送信するために、定期送信時期(例えば1分後)かどうかを判定する。
【0047】
S206:ステップ205において、定期送信の時期に到達していた場合、制御部4は、その時期がポイント記録部9による情報送信後、所定時間(例えば5秒)を経過しているかどうか判定する。所定時間経過していない場合は、ステップ207へ進み、定期間隔の位置情報送信を抑止する。これにより情報の精度を維持して通信コストを低減する効果が得られる。所定時間経過している場合は前記ステップ201へ進む。
【0048】
S207:最終的に制御部4は、車両100の運行終了などで位置情報の送信が不要になったかどうか判定する。不要になっていない場合はステップ203へ進み、不要になった場合はこの動作を終了する。
【0049】
図10は、第1の実施の形態に関するナビゲーション装置1の動作のフローチャートである。これを参照して、ナビゲーション装置1のポイント位置情報の送信と方向変位時の位置情報の送信の動作を説明する。
【0050】
S301:前記と同様にナビゲーション装置1の制御部4は、電源オンとともに現在位置測定装置2を制御することにより、車両100の位置情報を取得する。
【0051】
S302:制御部4は、取得した位置情報を無線通信装置3へ出力する。無線通信装置3は、無線回線を通じて前記位置情報を位置情報サービスセンタ10の通信サーバ部11へ送信する。その後、車両100の位置情報を送信する送信タイミングは、ナビゲーション装置1の制御部4が初期設定で定めた定期間隔(例えば1分)毎とする。このようにして位置情報の更新を定期間隔で行う。
【0052】
S303:制御部4は、現在位置測定装置2を制御して、適時に車両100の位置情報を取得する。
【0053】
S304:制御部4は、ステップ303で取得した車両100の位置情報がポイント記録部9に初期設定されたポイント情報の範囲内であるかどうかを判定する。前記位置情報が前記ポイント情報の範囲内であれば、ステップ305へ進み、そうでなければステップ307へ進む。
【0054】
図11は第1の実施の形態に関する車両100とポイント位置の関係を示す説明図である。初期設定されたポイント情報として高速道路のサービスエリア(g)の緯度経度が格納されている。車両100がポイント位置としての高速道路のサービスエリア(g)に接近したとき、即ち、制御部4は、距離に換算して10メートル以内の範囲内に接近したかどうか判定する。
【0055】
S305:前記位置情報が前記ポイント情報の範囲内であるとき、制御部4は、同じポイントについて判定したものかどうか判定する。即ち、初期設定されたポイント位置(高速道路のサービスエリア)にはじめて接近した場合はステップ301へ進み、再度、現在位置測定装置2を制御して位置情報を取得する(S301)。制御部4は、取得した位置情報を、無線通信装置3を介して、位置情報サービスセンタ10へ送信する(S302)。また、既に同じポイントについて判定済みの場合、即ち、高速道路のサービスエリア(g)に既に進入している場合、車両100の位置情報を送信する必要がなく、更に車両100の方向変位も測定する必要がないのでステップ306へ進む。
【0056】
S306:同じポイントについて判定済みの場合、制御部4は規定時間(この場合は例えば10分)経過しているか判定する。規定時間経過している場合は、ステップ301へ進み、再度、現在位置測定装置2を制御して位置情報を取得する(S301)。制御部4は、取得した位置情報を、無線通信装置3を介して、位置情報サービスセンタ10へ送信する(S302)。そして、規定時間経過していない場合は、ステップ309へ進む。即ち、この場合は、ステップ307での車両100の方向変位を測定する必要がないので、車両100の方向変位が一定時間無視される。
【0057】
S307:ステップ304において、前記位置情報が前記ポイント情報の範囲内でなければ、制御部4は、ジャイロセンサ部8を制御し、車両100の方向変位、即ち、左右方向変位と上下方向変位を測定する。
【0058】
S308:制御部4は、ジャイロセンサ部8から取得した方向変位情報が、車両100の左右方向変位が所定の規定値(例えば角度45度)以上か又は車両100の上下方向変位が所定の規定値(例えば22.5度)以上か判定する。規定値を越えた場合、制御部4は方向変位があったと判定し、再度、現在位置測定装置2を制御することにより、位置情報を取得する(S301)。制御部4は取得した位置情報を無線通信装置3へ送信し、無線通信装置3は無線回線を通じて前記位置情報をサービスセンタ10の通信サーバへ送信する(S302)。
【0059】
S309:最終的に制御部4は、車両100の運行終了などで位置情報の送信が不要になったかどうか判定する。不要になっていない場合はステップ303へ進み、不要になった場合はこの動作を終了する。
【0060】
本実施の形態では、制御部4が自律的に位置情報を送信した直後の、定期間隔での位置情報送信を抑止しているが、定期送信間隔自体を更に長い間隔(例えば1分→3分)とすることでも正確な位置情報の取得が可能である。このように制御部4が自律的に、方向変位を検知した場合に、位置情報を位置情報サービスセンタ10に送信することで、定期間隔の位置情報送信回数を減らせる効果がある。
【0061】
例えば、カーブが少なく、かつ、上り下りの少ない平坦な道では、定期間隔を長くしても、トレース情報の精度に影響を与えないため、通信費用を抑えながら正確なトレース情報の取得が可能になる。この場合、制御部4は、ジャイロセンサ部8からの規定以上の方向変位が所定時間(例えば5分間)なかった場合、定期間隔での送信を一定時間抑止するようにしてもよい。もちろん、通信コストが比較的低廉な場合などには、定期間隔での送信を抑止しなくてもよい。その場合は、位置情報の精度は上昇する。
【0062】
更に、本実施の形態では、車両100が自律的に、初期設定されたポイント位置に到達した場合に、車両100の位置情報を位置情報サービスセンタ10に送信することで、定期間隔の位置情報送信回数を減らせる効果がある。
【0063】
更に、本実施の形態によれば、高速道路のサービスエリア(g)等の特定のポイント位置に接近した後、所定の時間は車両100の位置情報を送信する必要がなく、更に車両100の方向変位も測定する必要がないので、その間(例えば10分間)車両100の方向変位を無視することとしたので、無駄な情報を送信することがなく、通信料金を抑えることができる。
【0064】
本実施の形態では、主にナビゲーション装置1を車両100に搭載した例を説明したが、本発明の位置情報の収集のための制御部4は、ナビゲーション装置やPND端末など、位置情報サービスセンタに位置情報を送信する端末全般に適用可能である。
【0065】
本実施の形態では、現在位置情報収集装置として、GPSアンテナを用いることとしたが、これに限定されず、PHS端末、Wi−Fi電波検出機など、現在位置を収集できるものであればよい。また、本発明の実施の形態では、方向変位測定手段として、ジャイロセンサを用いることとしたが、これに限定されず、磁気センサなど、方向の変位が測定できるものであればよい。更に、本発明の実施の形態では、加速度センサを用いることとしたが、これに限定されず、車速センサなど、車両100の走行状態が測定できるものであればよい。
【符号の説明】
【0066】
1 ナビゲーション装置
2 現在位置測定装置
3 無線通信装置
4 制御部
5 記憶部
7 加速度センサ部
8 ジャイロセンサ部
28 ポイント記録部
10 位置情報サービスセンタ
100 車両
【技術分野】
【0001】
本発明は、車両の位置情報を収集する位置情報収集システムに関するものである。
【背景技術】
【0002】
位置情報収集システムでは従来、GPSによる位置情報を取得し、更に、各種通信手段により位置情報サービスセンタへ位置情報を送信するナビゲーション装置を車両に搭載していた。そのナビゲーション装置は、予め設定された時間間隔に従ってセンタに位置情報を送信していた。
【0003】
ここで、特開平5−233996(特許文献1)には、道路交通状況予測システムが開示されている。特許文献1の道路交通状況予測システムは、車両に搭載された運行データ通報装置が、人工衛星からの信号により自己の位置を認識し、一定距離毎に或いは一定時間毎に、自己の位置を親局に送信する技術が開示されている。
【0004】
また、特開2002−99982(特許文献2)には、道路交通管理方式が開示されている。特許文献2に記載の道路交通管理方式では、道路交通管理センタと車両に搭載したナビゲーション装置との間で通信が行われ、ナビゲーション装置が通過予定経路情報という形で情報の送信を行うことが開示されており、通過予定経路の設定又は変更が必要なときのみの情報送信を行うことが開示されている。
【0005】
更に、特開2010−9443(特許文献3)には、自車両外部装置に位置情報を送信し、通信費を節約した車載装置が開示されている。特許文献3に記載の車載装置と外部装置を有する車両運行管理システムでは、車載装置が、車両の位置情報を取得する位置情報取得手段と、車両の進行方向の変化を検知する走行状態検知手段を備え、走行状態検知手段で検知した車両の進行方向が所定値以上変化した場合、位置情報取得手段で取得した位置情報を外部装置へ送信することが記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平5−233996号公報
【特許文献2】特開2002−99982号公報
【特許文献3】特開2010−9443
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の位置情報収集システムは、ナビゲーション装置で予め設定された位置情報送信の時間間隔が、通信料金と位置情報精度の兼ねあいから決められることが多く、通信料金を抑えることとすると、センタへ位置情報を送信する時間間隔を長くする必要があった。特許文献3では、GPS受信手段が検出した車両の移動に伴う緯度、経度の変化と時刻の変化との関係から、車両の進行方向の変化を検出し、検出の都度、GPSからの位置情報を送信するものが記載されている。
【0008】
しかしながら、特許文献3による車両運行管理システムでは、位置情報の送信の時期を、一定間隔の送信と、車両の進行方向の変化の検出の都度の両方であるため、送信の頻度の減少は少なく、通信料の削減の実効は薄いものである。
【0009】
更に、車両の位置情報収集システムにとって、実際の車両の動作を考慮すると、例えば、高速道路におけるサービスエリア内のように限られた領域内では、車両の進行方向の変化はあまり重要ではなく、そのため、無駄な情報を送信しているという問題があった。
【0010】
本発明が解決しようとする課題は、車両の位置情報を送信するのに、通信料金を抑えるとともに、位置情報精度の向上を図った位置情報収集システムを得ることにある。即ち、本発明は、位置情報サービスセンタへ位置情報を送信するのに、予め設定された時間間隔と、車両の進行方向の変化の検出の都度と、更に予め設定したポイント位置に近づいたことの検出の都度とすることにより、位置情報サービスセンタへの位置情報の送信の頻度を最小限とし、かつ位置情報サービスセンタは正確な道路走行のトレースを行うことができる位置情報収集システムを得ることである。
【課題を解決するための手段】
【0011】
上記問題を解決するために本発明に関する位置情報収集装置は、車両に搭載され、車両の位置情報を測定する現在位置測定手段と、車両の走行に基づいた方向変位を測定する方向変位測定手段と、前記現在位置測定手段が測定する車両の前記位置情報をセンタに送信する無線送信手段と、予め設定したポイント位置のポイント位置情報を格納するポイント記録部を有し、更に、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに定期間隔で送信し、かつ前記方向変位測定手段により測定した方向変位が一定の閾値を超えた場合、又は前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに送信し、更に前記無線送信手段に対し、前記定期間隔での送信を一定時間抑止するように制御する制御部を有することを特徴とするものである。
【発明の効果】
【0012】
本発明の位置情報収集システムによれば、車両の右左折や坂道を検知し、予め決められたポイント位置への接近を検知するようにすれば、予め設定された定期間隔以外にも、位置情報サービスセンタへ位置情報を送信することが可能となる。そして、方向変位やポイント位置への接近により位置情報を送信した後は、定期間隔に位置情報を送信することを抑止することにより、送信頻度を減少することができる。そして、取得した位置情報は、交通流の分析・運行ルート・時間の検討などに使用可能な情報となる。これらの情報はナビゲーション装置側からの自律的な送信により取得可能なため、道路トレースの精緻化のために定期間隔を短くする必要がなく、位置情報を送信する際の通信料金を抑えられるという利点がある。
【図面の簡単な説明】
【0013】
【図1】第1の実施の形態に関する位置情報収集システムのブロック図である。
【図2】第1の実施の形態に関するナビゲーション装置のブロック図ある。
【図3】第1の実施の形態に関する位置情報サービスセンタの信号の流れの説明図 である。
【図4】第1の実施の形態に関するナビゲーション装置の動作のフローチャートである。
【図5】第1の実施の形態に関する車両の左右方向変位の説明図である。
【図6】第1の実施の形態に関する車両の左右方向変位の判定の説明図である。
【図7】第1の実施の形態に関する車両の上下方向変位の説明図である。
【図8】第1の実施の形態に関する車両の上下方向変位の判定の説明図である。
【図9】第1の実施の形態に関するナビゲーション装置の動作のフローチャートである。
【図10】第1の実施の形態に関するナビゲーション装置の動作のフローチャートである。
【図11】第1の実施の形態に関する車両とポイント位置の関係を示す説明図である。
【発明を実施するための形態】
【0014】
<第1の実施の形態>
図1は、第1の実施の形態に関する位置情報収集システムのブロック図である。位置情報収集システムは、車両100に搭載されるナビゲーション装置1と、ナビゲーション装置1に接続された現在位置測定装置2及び無線通信装置3を含み、車両100から遠隔の場所に設置された位置情報サービスセンタ10からなる。
【0015】
現在位置測定装置2は、衛星Sからの電波を受信する図示しないGPSアンテナを含み、車両100の現在位置を測定する。現在位置測定装置2は、受信した電波から緯度経度からなる現在位置を計算し、計算した現在位置をナビゲーション装置1に出力する。無線通信装置3はナビゲーション装置1の指示により、車両100の位置情報を無線回線を通じて位置情報サービスセンタ10に対し送信する。なお、GPS(グローバルポジショニングシステム)は、地球上にある20数個の衛星Sより電波さえ受信できれば24時間いつでも緯度経度を出力することができ、簡単に現在位置を割り出すことのできる電波航法の一種である。
【0016】
位置情報サービスセンタ10は、車両100から遠隔の場所に設置され、車両100と無線回線を通じて通信可能となっている。位置情報サービスセンタ10の内部に設置された通信サーバ部11は、車両100の無線通信装置3と通信を行い、車両100から位置情報を受信する。更に、位置情報サービスセンタ10は、受信した位置情報を、交通流の分析、運行ルートや時間の検索などの目的に応じて処理し活用する。
【0017】
図2は、第1の実施の形態に関するナビゲーション装置1のブロック図ある。ナビゲーション装置1に内蔵された制御部4は、記憶部5に格納された位置情報収集発呼ソフトウェアを動作させることにより、ナビゲーション装置1の各部を制御する。
【0018】
前記制御部4は、前記位置情報収集発呼ソフトウェアを用いて、前記現在位置測定装置2から取得した情報と、加速度センサ部7と方向変位測定手段としてのジャイロセンサ部8からの情報とを合わせて位置情報を作成する。更に、制御部4は、現在位置測定装置2から取得した情報から定期間隔毎に位置情報を作成する。制御部4は、作成した位置情報を無線通信装置3を介して位置情報サービスセンタ10に送信する。更に、制御部4は、車両100の位置情報が、予め初期設定されたポイント位置のポイント位置情報の一定の範囲内(例えば距離に換算して10メートル以内)となるかどうか判定する。初期設定されたポイントとしては、例えば、後に図11に示す説明図における高速道路のサービスエリア(g)である。
【0019】
前記制御部4は、ナビゲーション装置1の電源のオンともに位置情報を取得して、その位置情報を位置情報サービスセンタ10に送信する。その後も、定期間隔(例えば1分)毎に位置情報の更新情報を送信する。更に、定期間隔毎の送信タイミングに加えて、車両100の走行に基づき、所定の走行状態のときに自律的に位置情報を送信する。所定の走行状態のときとは、車両100の走行方向が左右方向又は上下方向に所定の方向変位があった場合、及び車両100の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合である。
【0020】
なお、制御部4は、所定の方向変位がなくても、定期間隔毎に位置情報を送信するが、ここで、方向変位による位置情報の送信後、所定時間(例えば5秒)が経過していない場合は、定期間隔の位置情報の送信(更新)を抑止する。これは、このような場合に定期間隔による位置情報の更新を抑止しても、位置情報の精度に問題が少なく、その分通信料金を抑えられるからである。また、車両100の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合に位置情報を送信するときも同様である。
【0021】
加速度センサ部7は、タイヤの回転に基づいて車両100の加速度及び走行速度を測定する装置である。加速度センサ部7は、加速度を検知し車両100が走行しているか停止しているか、及び走行している場合の速度の情報を収集し、制御部4に出力する。
【0022】
方向変位測定手段としてのジャイロセンサ部8は、走行中の車両100の走行方向を測定する装置である。東西南北の方向及び上下方向を検知し、それらの情報を制御部4に送信する。ポイント記録部9は、初期設定した緯度経度からなるポイント情報を記録する。
【0023】
ポイント記録部9は、初期設定した緯度経度からなる複数の位置情報、例えば図11に示す高速道路のサービスエリア(g)の緯度経度を記録する。制御部4は、現在位置測定装置2が取得した位置情報が、ポイント記録部9にある位置情報に初期設定された範囲内(例えば距離に換算して10メートル以内)にあるかどうか判定する。無線通信装置3は、制御部4が生成した位置情報(日付、時刻、緯度経度、速度、方位、高度)を自律的に位置情報サービスセンタ10へ送信する。
【0024】
無線通信装置3は、制御部4の制御により、制御部4が生成した位置情報(日付、時刻、緯度経度、速度、方位、高度)を位置情報サービスセンタ10へ送信する。位置情報としては、年月日、時分秒、緯度経度、速度、方向、海抜であり、例えば、「2009年12月22日、am10:05:00、北緯35度41分25秒、東経139度45分36秒、35.5km/h、方位角75.8度、海抜6.0m」のようになる。なお、年月日、時分秒の情報は、図示しないタイマー手段によって取得する。
【0025】
図3は、第1の実施の形態に関する位置情報サービスセンタ10の信号の流れの説明図である。位置情報サービスセンタ10の通信サーバ部11は、ナビゲーション装置1から無線通信装置3を介して位置情報を受信し、DBサーバ部12に送信する。また、通信サーバ部11はネットワークを介して、携帯電話21やパソコン22と接続している。更に、通信サーバ部11は、APサーバ部14及びWebサーバ部15とも接続し、情報の送受信を行う。
【0026】
DBサーバ部12は、通信サーバ部11から送信される車両100の位置情報を格納する。地図サーバ部13は、位置情報収集システムに用いられる地図情報を格納する。APサーバ部14は、DBサーバ部12に格納された車両100の位置情報や地図サーバ部13に格納された地図情報を加工し、携帯電話21やパソコン22から要求される情報を作成する。Webサーバ部15は、情報の形式を携帯電話21やパソコン22で利用可能な形式に変換する。
【0027】
ここで、地図サーバ部13は、APサーバ部14からのリクエストがあると、格納している地図情報をAPサーバ部14に送信する。APサーバ部14は、携帯電話21やパソコン22のリクエストにより、対象車両100の位置情報をDBサーバ部12から読み出し、読み出した位置情報を基に地図サーバ部13から該当地域の地図情報を読み出し、地図上に車両100の位置情報をマッピングする。更に、車両100の位置情報をマッピングした地図情報を、Webサーバ部15に送信する。Webサーバ部15は、位置情報を携帯電話21やパソコン22で表示可能な形式に変換し、通信サーバ部11に送信する。通信サーバ部11は、Webサーバ部15から受信した前記地図情報を、携帯電話21やパソコン22へ送信する。
【0028】
このようにして、位置情報サービスセンタ10では、正確な車両100の位置情報や経路情報を、地図情報にマッピングした形で、リクエストのあった携帯電話21やパソコン22に提供することができる。
【0029】
図4は、第1の実施の形態に関するナビゲーション装置1の動作を示すフローチャートである。これを参照して、ナビゲーション装置1の方向変位時の位置情報の送信動作を説明する。
【0030】
S101:ナビゲーション装置1の制御部4は、電源オンとともに、現在位置測定装置2を制御することにより、車両100の位置情報を取得する。
【0031】
S102:制御部4は、取得した位置情報を無線通信装置3へ出力する。無線通信装置3は、制御部4の制御により、無線回線を通じて前記位置情報を位置情報サービスセンタ10の通信サーバ部11へ送信する。その後、車両100の位置情報を送信する送信タイミングは、ナビゲーション装置1の制御部4が初期設定で定めた定期間隔(例えば1分)毎とする。このようにして位置情報の更新を定期間隔で行う。ここでは、位置情報の更新について、定期間隔毎の送信タイミングに加えて、車両100が左右方向又は上下方向に所定の方向変位があった場合に位置情報を送信する。この位置情報の送信は、次に説明する方向変位のときに行う。所定の方向変位は、位置情報を更新する条件となる。
【0032】
図5は第1の実施の形態に関する車両100の左右方向変位の説明図であり、図6は第1の実施の形態に関する車両100の左右方向変位の判定の説明図である。図5に示す車両100の右折の例をとってみると、GPSでの位置情報取得ポイント、即ち定期間隔の送信タイミングにおける車両100の位置が、地点(a)と地点(b)であった場合とする。この場合、位置情報サービスセンタ10としては、車両100が地点(a)(c)(b)のコースAを走行したのか、地点(a)(d)(e)(f)(b)のコースBを走行したのか分からない。しかしながら、右折点(c)の位置情報があれば車両100はコースAを走行したことが分かる。また、右左折点(d)、(e)、(f)の位置情報があれば、車両100はコースBを走行したことが分かる。
【0033】
この場合、送信タイミングの定期間隔を短くすれば、右折点(c)や右左折点(d)、(e)、(f)に近い位置情報を得ることができるが、通信料金が増大することとなる。一方、右折点(c)や右左折点(d)、(e)、(f)における方向変位が把握できれば、コースA及びコースBの判定をすることができる。このように、車両100の方向変位がコース判定の重要ポイントとなる。
【0034】
図6において、車両100が東から西へ走行中、右左折変位それぞれ変更角度が45度を超える場合、所定の方向変位があったとして、位置情報を更新することとする。
【0035】
また、図7は第1の実施の形態に関する車両100の上下方向変位の説明図であり、図8は第1の実施の形態に関する車両100の上下方向変位の判定の説明図である。ここで、図7に示すように、車両100が坂道を上る場合は地点(1)(2)(3)を走行し、坂道を下る場合は地点(4)(5)(6)を走行する。図8において、車両100が右から左に走行中、上り坂又は下り坂を走行する上下方向変位がそれぞれ変更角度が22.5度を超える場合、所定の方向変位があったとして位置情報を更新することとする。
【0036】
S103:制御部4はジャイロセンサ部8を制御することにより、車両100の方向変位、即ち、左右方向変位と上下方向変位を測定し方向変位情報を取得する。
【0037】
S104:制御部4は、ジャイロセンサ部8から取得した方向変位情報が、図6に示すように車両100の左右方向変位が所定の規定値(例えば角度45度)以上か又は図8に示すように車両100の上下方向変位が所定の規定値(例えば22.5度)以上か判定する。ステップ104の判定で規定値を越えた場合に、制御部4は方向変位があったと判定し、再度、現在位置測定装置2を制御することにより位置情報を取得する(S101)。制御部4は、取得した位置情報を無線通信装置3へ送信し、無線通信装置3は、無線回線を通じて前記位置情報をサービスセンタ10の通信サーバへ送信する(S102)。
【0038】
S105:ステップ104において規定以上の方向変位がない場合、制御部4は、定期間隔毎に位置情報を送信するために、定期送信時期かどうかを判定する。
【0039】
S106:ステップ105において定期送信の時期に到達していた場合、制御部4は、方向変位による位置情報送信後、所定時間(例えば5秒)を経過しているか判断する。所定時間(例えば5秒)を経過している場合はステップ101に戻る。所定時間(例えば5秒)を経過していない場合は、定期間隔の位置情報送信を抑止する。これにより、情報の精度を維持して通信コストを低減する効果が得られる。
【0040】
S107:ステップ105において定期送信時期でない場合、及びステップ106において所定時間を経過していない場合は、最終的に制御部4は、車両100の運行終了などで位置情報の送信が不要になったか判断する。送信不要になった場合はこの動作を終了する。
【0041】
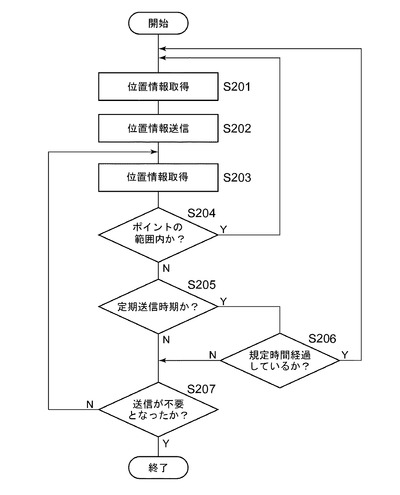
図9は、第1の実施の形態に関するナビゲーション装置1の動作のフローチャートである。これを参照して、ナビゲーション装置1のポイント位置情報の送信動作を説明する。
【0042】
S201:前記と同様にナビゲーション装置1の制御部4は、電源オンとともに現在位置測定装置2を制御することにより、車両100の位置情報を取得する。
【0043】
S202:制御部4は、取得した位置情報を無線通信装置3へ出力する。無線通信装置3は、無線回線を通じて前記位置情報を位置情報サービスセンタ10の通信サーバ部11へ送信する。その後、車両100の位置情報を送信する送信タイミングは、ナビゲーション装置1の制御部4が初期設定で定めた定期間隔(例えば1分)毎とする。このようにして位置情報の更新を定期間隔で行う。
【0044】
S203:制御部4は、現在位置測定装置2を制御して適時に車両100の位置情報を取得する。
【0045】
S204:制御部4は、ステップ203で取得した車両100の位置情報がポイント記録部9に初期設定されたポイント情報の範囲内であるかどうかを判定する。制御部4は、もし前記位置情報が前記ポイント情報の範囲内であれば、再度、現在位置測定装置2を制御して位置情報を取得する(S201)。制御部4は、取得した位置情報を無線通信装置3を介して、位置情報サービスセンタ10へ送信する(S202)。
【0046】
S205:次に制御部4は、初期設定されたポイント記録部9の範囲でない場合、定期間隔毎に位置情報を送信するために、定期送信時期(例えば1分後)かどうかを判定する。
【0047】
S206:ステップ205において、定期送信の時期に到達していた場合、制御部4は、その時期がポイント記録部9による情報送信後、所定時間(例えば5秒)を経過しているかどうか判定する。所定時間経過していない場合は、ステップ207へ進み、定期間隔の位置情報送信を抑止する。これにより情報の精度を維持して通信コストを低減する効果が得られる。所定時間経過している場合は前記ステップ201へ進む。
【0048】
S207:最終的に制御部4は、車両100の運行終了などで位置情報の送信が不要になったかどうか判定する。不要になっていない場合はステップ203へ進み、不要になった場合はこの動作を終了する。
【0049】
図10は、第1の実施の形態に関するナビゲーション装置1の動作のフローチャートである。これを参照して、ナビゲーション装置1のポイント位置情報の送信と方向変位時の位置情報の送信の動作を説明する。
【0050】
S301:前記と同様にナビゲーション装置1の制御部4は、電源オンとともに現在位置測定装置2を制御することにより、車両100の位置情報を取得する。
【0051】
S302:制御部4は、取得した位置情報を無線通信装置3へ出力する。無線通信装置3は、無線回線を通じて前記位置情報を位置情報サービスセンタ10の通信サーバ部11へ送信する。その後、車両100の位置情報を送信する送信タイミングは、ナビゲーション装置1の制御部4が初期設定で定めた定期間隔(例えば1分)毎とする。このようにして位置情報の更新を定期間隔で行う。
【0052】
S303:制御部4は、現在位置測定装置2を制御して、適時に車両100の位置情報を取得する。
【0053】
S304:制御部4は、ステップ303で取得した車両100の位置情報がポイント記録部9に初期設定されたポイント情報の範囲内であるかどうかを判定する。前記位置情報が前記ポイント情報の範囲内であれば、ステップ305へ進み、そうでなければステップ307へ進む。
【0054】
図11は第1の実施の形態に関する車両100とポイント位置の関係を示す説明図である。初期設定されたポイント情報として高速道路のサービスエリア(g)の緯度経度が格納されている。車両100がポイント位置としての高速道路のサービスエリア(g)に接近したとき、即ち、制御部4は、距離に換算して10メートル以内の範囲内に接近したかどうか判定する。
【0055】
S305:前記位置情報が前記ポイント情報の範囲内であるとき、制御部4は、同じポイントについて判定したものかどうか判定する。即ち、初期設定されたポイント位置(高速道路のサービスエリア)にはじめて接近した場合はステップ301へ進み、再度、現在位置測定装置2を制御して位置情報を取得する(S301)。制御部4は、取得した位置情報を、無線通信装置3を介して、位置情報サービスセンタ10へ送信する(S302)。また、既に同じポイントについて判定済みの場合、即ち、高速道路のサービスエリア(g)に既に進入している場合、車両100の位置情報を送信する必要がなく、更に車両100の方向変位も測定する必要がないのでステップ306へ進む。
【0056】
S306:同じポイントについて判定済みの場合、制御部4は規定時間(この場合は例えば10分)経過しているか判定する。規定時間経過している場合は、ステップ301へ進み、再度、現在位置測定装置2を制御して位置情報を取得する(S301)。制御部4は、取得した位置情報を、無線通信装置3を介して、位置情報サービスセンタ10へ送信する(S302)。そして、規定時間経過していない場合は、ステップ309へ進む。即ち、この場合は、ステップ307での車両100の方向変位を測定する必要がないので、車両100の方向変位が一定時間無視される。
【0057】
S307:ステップ304において、前記位置情報が前記ポイント情報の範囲内でなければ、制御部4は、ジャイロセンサ部8を制御し、車両100の方向変位、即ち、左右方向変位と上下方向変位を測定する。
【0058】
S308:制御部4は、ジャイロセンサ部8から取得した方向変位情報が、車両100の左右方向変位が所定の規定値(例えば角度45度)以上か又は車両100の上下方向変位が所定の規定値(例えば22.5度)以上か判定する。規定値を越えた場合、制御部4は方向変位があったと判定し、再度、現在位置測定装置2を制御することにより、位置情報を取得する(S301)。制御部4は取得した位置情報を無線通信装置3へ送信し、無線通信装置3は無線回線を通じて前記位置情報をサービスセンタ10の通信サーバへ送信する(S302)。
【0059】
S309:最終的に制御部4は、車両100の運行終了などで位置情報の送信が不要になったかどうか判定する。不要になっていない場合はステップ303へ進み、不要になった場合はこの動作を終了する。
【0060】
本実施の形態では、制御部4が自律的に位置情報を送信した直後の、定期間隔での位置情報送信を抑止しているが、定期送信間隔自体を更に長い間隔(例えば1分→3分)とすることでも正確な位置情報の取得が可能である。このように制御部4が自律的に、方向変位を検知した場合に、位置情報を位置情報サービスセンタ10に送信することで、定期間隔の位置情報送信回数を減らせる効果がある。
【0061】
例えば、カーブが少なく、かつ、上り下りの少ない平坦な道では、定期間隔を長くしても、トレース情報の精度に影響を与えないため、通信費用を抑えながら正確なトレース情報の取得が可能になる。この場合、制御部4は、ジャイロセンサ部8からの規定以上の方向変位が所定時間(例えば5分間)なかった場合、定期間隔での送信を一定時間抑止するようにしてもよい。もちろん、通信コストが比較的低廉な場合などには、定期間隔での送信を抑止しなくてもよい。その場合は、位置情報の精度は上昇する。
【0062】
更に、本実施の形態では、車両100が自律的に、初期設定されたポイント位置に到達した場合に、車両100の位置情報を位置情報サービスセンタ10に送信することで、定期間隔の位置情報送信回数を減らせる効果がある。
【0063】
更に、本実施の形態によれば、高速道路のサービスエリア(g)等の特定のポイント位置に接近した後、所定の時間は車両100の位置情報を送信する必要がなく、更に車両100の方向変位も測定する必要がないので、その間(例えば10分間)車両100の方向変位を無視することとしたので、無駄な情報を送信することがなく、通信料金を抑えることができる。
【0064】
本実施の形態では、主にナビゲーション装置1を車両100に搭載した例を説明したが、本発明の位置情報の収集のための制御部4は、ナビゲーション装置やPND端末など、位置情報サービスセンタに位置情報を送信する端末全般に適用可能である。
【0065】
本実施の形態では、現在位置情報収集装置として、GPSアンテナを用いることとしたが、これに限定されず、PHS端末、Wi−Fi電波検出機など、現在位置を収集できるものであればよい。また、本発明の実施の形態では、方向変位測定手段として、ジャイロセンサを用いることとしたが、これに限定されず、磁気センサなど、方向の変位が測定できるものであればよい。更に、本発明の実施の形態では、加速度センサを用いることとしたが、これに限定されず、車速センサなど、車両100の走行状態が測定できるものであればよい。
【符号の説明】
【0066】
1 ナビゲーション装置
2 現在位置測定装置
3 無線通信装置
4 制御部
5 記憶部
7 加速度センサ部
8 ジャイロセンサ部
28 ポイント記録部
10 位置情報サービスセンタ
100 車両
【特許請求の範囲】
【請求項1】
車両に搭載され、車両の位置情報を測定する現在位置測定手段と、
車両の走行に基づいた方向変位を測定する方向変位測定手段と、
前記現在位置測定手段が測定する車両の前記位置情報をセンタに送信する無線送信手段と、
予め設定したポイント位置のポイント位置情報を格納するポイント記録部を有し、
更に、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに定期間隔で送信し、
かつ前記方向変位測定手段により測定した方向変位が一定の閾値を超えた場合、又は前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに送信し、
更に前記無線送信手段に対し、前記定期間隔での送信を一定時間抑止するように制御する制御部を有することを特徴とする位置情報収集装置。
【請求項2】
前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記制御部は、
方向変位測定手段により前記方向変位を一定時間無視するように制御することを特徴とする請求項1に記載の位置情報収集装置。
【請求項3】
前記方向変位測定手段は、ジャイロセンサであり、前記方向変位とは、右左折方向変位及び上下方向変位であることを特徴とする請求項1又は2に記載の位置情報収集装置。
【請求項4】
複数の車両から送信された車両の位置情報を受信し、交通流の分析、運行ルートや時間の検索に活用する位置情報サービスセンタと、前記位置情報サービスセンタに車両の位置情報を送信する位置情報収集装置とならなり、
前記位置情報収集装置は、
車両に搭載され、車両の位置情報を測定する現在位置測定手段と、
車両の走行に基づいた方向変位を測定する方向変位測定手段と、
前記現在位置測定手段が測定する車両の前記位置情報をセンタに送信する無線送信手段と、
予め設定したポイント位置のポイント位置情報を格納するポイント記録部を有し、
更に、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに定期間隔で送信し、
かつ前記方向変位測定手段により測定した方向変位が一定の閾値を超えた場合、又は前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに送信し、
更に前記無線送信手段に対し、前記定期間隔での送信を一定時間抑止するように制御する制御部を有することを特徴とする位置情報収集システム。
【請求項5】
前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記制御部は、
方向変位測定手段により前記方向変位を一定時間無視するように制御することを特徴とする請求項4に記載の位置情報収集システム。
【請求項6】
車両の位置情報を測定する現在位置測定ステップと、
車両の走行に基づいた方向変位を測定する方向変位測定ステップと、
前記現在位置測定ステップで測定する車両の前記位置情報を定期間隔でセンタに送信する第1の無線送信ステップと、
方向変位測定ステップで測定する方向変位が一定の閾値を超えるかどうか判定する方向変位判定ステップと、
現在位置測定ステップで測定する車両の前記位置情報が予め設定したポイント位置のポイント位置情報の一定の範囲内かどうか判定するポイント位置判定ステップと、
方向変位判定ステップでの一定の閾値を超える場合又はポイント位置判定ステップでの一定の範囲内である場合、前記現在位置測定ステップで測定する車両の前記位置情報をセンタに送信する第2の無線送信ステップとをコンピュータに実行させるための位置情報収集プログラム。
【請求項1】
車両に搭載され、車両の位置情報を測定する現在位置測定手段と、
車両の走行に基づいた方向変位を測定する方向変位測定手段と、
前記現在位置測定手段が測定する車両の前記位置情報をセンタに送信する無線送信手段と、
予め設定したポイント位置のポイント位置情報を格納するポイント記録部を有し、
更に、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに定期間隔で送信し、
かつ前記方向変位測定手段により測定した方向変位が一定の閾値を超えた場合、又は前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに送信し、
更に前記無線送信手段に対し、前記定期間隔での送信を一定時間抑止するように制御する制御部を有することを特徴とする位置情報収集装置。
【請求項2】
前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記制御部は、
方向変位測定手段により前記方向変位を一定時間無視するように制御することを特徴とする請求項1に記載の位置情報収集装置。
【請求項3】
前記方向変位測定手段は、ジャイロセンサであり、前記方向変位とは、右左折方向変位及び上下方向変位であることを特徴とする請求項1又は2に記載の位置情報収集装置。
【請求項4】
複数の車両から送信された車両の位置情報を受信し、交通流の分析、運行ルートや時間の検索に活用する位置情報サービスセンタと、前記位置情報サービスセンタに車両の位置情報を送信する位置情報収集装置とならなり、
前記位置情報収集装置は、
車両に搭載され、車両の位置情報を測定する現在位置測定手段と、
車両の走行に基づいた方向変位を測定する方向変位測定手段と、
前記現在位置測定手段が測定する車両の前記位置情報をセンタに送信する無線送信手段と、
予め設定したポイント位置のポイント位置情報を格納するポイント記録部を有し、
更に、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに定期間隔で送信し、
かつ前記方向変位測定手段により測定した方向変位が一定の閾値を超えた場合、又は前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記現在位置測定手段により測定した前記位置情報を前記無線送信手段を介して前記センタに送信し、
更に前記無線送信手段に対し、前記定期間隔での送信を一定時間抑止するように制御する制御部を有することを特徴とする位置情報収集システム。
【請求項5】
前記車両の前記位置情報が前記ポイント位置情報の一定の範囲内となる場合、前記制御部は、
方向変位測定手段により前記方向変位を一定時間無視するように制御することを特徴とする請求項4に記載の位置情報収集システム。
【請求項6】
車両の位置情報を測定する現在位置測定ステップと、
車両の走行に基づいた方向変位を測定する方向変位測定ステップと、
前記現在位置測定ステップで測定する車両の前記位置情報を定期間隔でセンタに送信する第1の無線送信ステップと、
方向変位測定ステップで測定する方向変位が一定の閾値を超えるかどうか判定する方向変位判定ステップと、
現在位置測定ステップで測定する車両の前記位置情報が予め設定したポイント位置のポイント位置情報の一定の範囲内かどうか判定するポイント位置判定ステップと、
方向変位判定ステップでの一定の閾値を超える場合又はポイント位置判定ステップでの一定の範囲内である場合、前記現在位置測定ステップで測定する車両の前記位置情報をセンタに送信する第2の無線送信ステップとをコンピュータに実行させるための位置情報収集プログラム。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−165015(P2011−165015A)
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願番号】特願2010−28293(P2010−28293)
【出願日】平成22年2月11日(2010.2.11)
【出願人】(000000295)沖電気工業株式会社 (6,645)
【Fターム(参考)】
【公開日】平成23年8月25日(2011.8.25)
【国際特許分類】
【出願日】平成22年2月11日(2010.2.11)
【出願人】(000000295)沖電気工業株式会社 (6,645)
【Fターム(参考)】
[ Back to top ]