
保管庫システム

【課題】保管庫における容器の入出庫機構の簡素化によるコスト削減等を図ることが可能な保管庫システムを提供する。
【解決手段】保管庫システムは、筐体と、筐体内に配置され、容器を一時的に保管する棚と、入庫用受け渡し機構及び出庫用受け渡し機構と、筐体内に配置された容器移載装置と、を備える。入庫用受け渡し機構は、筐体の外部(例えば搬送車)より受け渡された容器を当該容器の向きを変えることなく容器移載装置に向けて移動又は搬送して、当該容器を容器移載装置に受け渡し可能な状態とする移動機構を備える。一方、第2の受け渡し機構は、容器移載装置より受け渡された容器を、当該容器の向きを変えることなく筐体の外部(例えば搬送車)に向けて移動して、当該容器を筐体の外部(例えば搬送車など)に対して受け渡し可能な状態とする他の移動機構を備える。これらの構成によれば入出庫用受け渡し機構を簡素化でき、保管庫のコストを削減できる。
【解決手段】保管庫システムは、筐体と、筐体内に配置され、容器を一時的に保管する棚と、入庫用受け渡し機構及び出庫用受け渡し機構と、筐体内に配置された容器移載装置と、を備える。入庫用受け渡し機構は、筐体の外部(例えば搬送車)より受け渡された容器を当該容器の向きを変えることなく容器移載装置に向けて移動又は搬送して、当該容器を容器移載装置に受け渡し可能な状態とする移動機構を備える。一方、第2の受け渡し機構は、容器移載装置より受け渡された容器を、当該容器の向きを変えることなく筐体の外部(例えば搬送車)に向けて移動して、当該容器を筐体の外部(例えば搬送車など)に対して受け渡し可能な状態とする他の移動機構を備える。これらの構成によれば入出庫用受け渡し機構を簡素化でき、保管庫のコストを削減できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置と保管庫との間で被収容物を収容する容器の受け渡しを行う保管庫システムに関する。
【背景技術】
【0002】
半導体工場などにおいて、搬送装置と保管庫とはシステム的に組み合わされて用いられることが多い。
【0003】
この種の搬送装置は、主に、軌道(レール)と、軌道に沿って走行し、被収容物を収容する容器を搬送する搬送車と、を備えて構成される。ここで、搬送車としては、例えばOHT(Over Head Hoist Transport)やOHS(Over Head Shuttle)などが挙げられる。また、被収容物としては、例えば半導体ウェハーや液晶用基板など各種の基板が挙げられる。また、容器としては、例えばFOUP(Front Open Unified Pod)や、FOSB(Front Opening Shipping Box)などが挙げられる。
【0004】
一方、この種の保管庫は、一般にストッカなどと称され、搬送車より搬送されてきた容器を一時的に保管しておく役割を有する。保管庫は、搬送車が走行する軌道に隣接して配置され、保管庫内には、搬送車により搬送される容器を複数個保管できるような多数の棚が設けられる。また、保管庫には、搬送車との間で容器の受け渡し(即ち、入出庫)を行うための受け渡し部(即ち、入出庫ポート)や、入出庫ポートと指定の棚との間で容器の搬送を行うための容器移載装置などが設けられる。ここで、容器移載装置(又は容器搬送装置)は、一般的に、ストッカロボット、ストッカクレーン等と称される。例えば、特許文献1及び2には、ストッカロボットと縦横無尽に広がる多数の棚とを有するストッカが記載されている。
【0005】
なお、特許文献3には、保管空間の高さ方向への増大を可能とする保管棚装置が記載されている。
【0006】
この保管棚装置は、角型の筐体と、その内部に設けられた円筒棚と、その内部に配備されたスタッカとを備える。円筒棚は、垂直に立設されたフレームに、周方向及び上下方向に多数の保管棚を設け、且つ所定箇所に、外部との間で保管物の受け渡しを行う受け渡し部を設けてなる。円筒棚は、クリーンルーム内に設置され、下端がグレーチング床に設けられた開口を貫通し、床下空間内に延びている。そして、その床下空間の床面には、円筒棚の下端ベース部が固定されていると共に、円筒棚の上端は、クリーンルームの天井に目一杯の高さに設定されている。このような構成を有する保管棚装置において、スタッカは、昇降、旋回、伸縮の3軸の動作で動かされ、保管棚と受け渡し部との間で保管物の受け渡しを行う役割を有する。
【0007】
【特許文献1】特開2006−049454号公報
【特許文献2】特開2003−182815号公報
【特許文献3】特開平10−98094号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、以上の点に鑑みてなされたものであり、保管庫における容器(保管物)の入出庫機構の簡素化によるコスト削減が可能で、且つ保管庫内のメインテナンスなどを容易に行うことが可能な保管庫システムを提供することを課題とする。
【課題を解決するための手段】
【0009】
本発明の1つの観点では、保管庫システムは、筐体と、前記筐体内に配置され、被収容物を収容する容器を載置する棚と、前記筐体の外部との間で前記容器の受け渡しを行う第1及び第2の受け渡し機構と、前記筐体内に配置され、前記第1及び第2の受け渡し機構と前記棚との間で前記容器の移載を行う容器移載装置と、を備え、前記第1の受け渡し機構は、前記筐体の外部より受け渡された前記容器を、当該容器の向きを変えることなく前記容器移載装置に向けて移動して、当該容器を前記容器移載装置に受け渡し可能な状態とする移動機構を備えると共に、前記第2の受け渡し機構は、前記容器移載装置より受け渡された前記容器を、当該容器の向きを変えることなく前記筐体の外部に向けて移動して、当該容器を前記筐体の外部に対して受け渡し可能な状態とする他の移動機構を備える。
【0010】
上記の保管庫システムは、筐体と、筐体内に配置された棚と、第1及び第2の受け渡し機構と、筐体内に配置された容器移載装置と、を備える。棚は被収容物を収容する容器(保管物)を載置する。ここで、容器としては、例えばFOUP、FOSBなどが挙げられる。また、被収容物としては、例えば、半導体ウェーハ、液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の各種の基板が挙げられる。第1及び第2の受け渡し機構は、筐体の外部(例えば、搬送車)との間で容器の受け渡しを行う。容器移載装置は、第1及び第2の受け渡し機構と棚との間で容器の移載を行う。
【0011】
特に、この保管庫システムでは、第1の受け渡し機構は、筐体の外部(例えば搬送車など)より受け渡された容器を、当該容器の向きを変えることなく容器移載装置に向けて移動又は搬送して、当該容器を容器移載装置に受け渡し可能な状態とする移動機構を備える。また、第2の受け渡し機構は、容器移載装置より受け渡された容器を、当該容器の向きを変えることなく筐体の外部(例えば搬送車など)に向けて移動して、当該容器を筐体の外部(例えば搬送車など)に対して受け渡し可能な状態とする他の移動機構を備える。
【0012】
これらの構成によれば、第1及び第2の受け渡し機構(入出庫ポート)において、後述する第1比較例のような容器の方向転換を行うための旋回ステージを必要としない。よって、この構成によれば、そのような旋回ステージを設けない分、保管庫のコストを削減できる。つまり、この保管庫システムでは、第1比較例と比べて、入出庫ポートにおける駆動機構の数の削減により保管庫のコストを削減することができる。また、駆動機構の数を削減することができるので、入出庫ポートの故障等に対する信頼性を向上させることができ、ひいては保管庫の故障等に対する信頼性を向上させることができる。
【0013】
好適な例では、前記容器は、一側面に対して前記被収容物を出し入れするための開放部を有する容器本体と、前記開放部に対して開閉自在に取り付けられる蓋と、を有し、前記第1及び第2の受け渡し機構と、前記筐体の外部及び前記容器移載装置との間では、前記容器の前記蓋が前記筐体の内側に向けられた状態で当該容器の受け渡しが行われる。また、前記移動機構及び前記他の移動機構は、前記筐体の外部から内部にかけて延在する搬送用のコンベアとして構成される。また、前記筐体に隣接する位置に配置された他の軌道と、前記他の軌道に沿って走行する他の搬送車とを有する他の搬送装置を備え、前記第1及び第2の受け渡し機構は、前記筐体の外部において、前記他の搬送車との間で前記容器の受け渡しを行うことが好ましい。
【0014】
本発明の他の観点では、保管庫システムは、軌道及び前記軌道に沿って走行する搬送車を有する搬送装置と、前記搬送車との間で被収容物を収容する容器の受け渡しを行う保管庫と、を備え、前記保管庫は、前記軌道に沿って前記搬送車を通過させるための開口を有する筐体と、前記筐体内に配置され、前記容器を載置する棚と、前記筐体内に配置され、前記容器の移載を行う容器移載装置と、を備え、前記容器移載装置は、前記開口を通じて前記保管庫内に進入した前記搬送車との間において前記容器の移載を直接行う。
【0015】
上記の保管庫システムは、軌道及び軌道に沿って走行する搬送車を有する搬送装置と、搬送車との間で被収容物を収容する容器の受け渡しを行う保管庫と、を備える。ここで、容器としては、例えばFOUP、FOSBなどが挙げられる。また、被収容物としては、例えば、半導体ウェーハ、液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の各種の基板が挙げられる。
【0016】
そして、保管庫は、筐体と、筐体内に配置された棚と、筐体内に配置された容器移載装置と、を備える。筐体は、軌道に沿って搬送車を通過させるための開口を有する。棚は容器を載置する。容器移載装置は容器の移載を行う。
【0017】
特に、この保管庫システムでは、容器移載装置は、前記開口を通じて保管庫内に進入した搬送車との間において容器の移載を直接行う。
【0018】
この構成によれば、保管庫に対して、上記したような第1及び第2の受け渡し機構(入出庫ポート)を設ける必要がないので、その分、保管庫のコストをより削減することができると共に、保管庫の故障等に対する信頼性の向上に寄与し得る。
【0019】
好適な例では、前記容器は、一側面に対して前記被収容物を出し入れするための開放部を有する容器本体と、前記開放部に対して開閉自在に取り付けられる蓋と、を有し、前記容器移載装置は、前記搬送車と前記棚との間において、前記容器の前記蓋が前記筐体の内側に向けられた状態で当該容器の移載を行うことが好ましい。
【0020】
上記の保管庫システムの一つの態様では、前記容器移載装置は、前記筐体の高さ方向及び当該高さ方向とは逆方向に向けて昇降可能な昇降機構と、前記筐体の中心軸に向かって延びる前記昇降機構の一端に支持されたアーム機構と、を備え、前記アーム機構は、前記筐体の中心軸回りに旋回可能に構成されると共に前記筐体の中心軸に近づく方向及び前記筐体の中心軸と離隔する方向に伸縮可能な複数のアームと、前記複数のアームのうち何れかのアームに支持され、前記容器を保持する容器保持部と、を有して構成される。また、前記昇降機構は、前記筐体の高さ方向に延在する案内部と、前記案内部に沿って昇降可能な昇降体と、を備える。
【0021】
上記の保管庫システムの他の態様では、前記筐体は4つの側面を有する箱状の形状を有し、前記4つの側面のうち1つの側面側において、当該1つの側面の高さ方向に沿う位置には前記案内部が配置され、前記4つの側面のうち残りの3つの側面側の各々において、当該3つの側面の各々の高さ方向に沿う位置には、前記棚が間隔をあけて複数配置され、前記アーム機構は、前記案内部及び前記複数の前記棚に取り囲まれる位置に配置され、前記案内部及び前記複数の前記棚の内側には、人が入り込んで作業することが可能な空間が形成されている。ここで、人による作業としては、例えば、容器移載装置のメインテナンス作業や、容器移載装置等の故障時などにおいて棚に載置された容器を筐体の外部に取り出す作業などが含まれる。
【0022】
これにより、複数の棚及び案内部の内側に形成される空間は、後述する第1比較例に係る空間Ezaと比べて大きくなる。そのため、人が筐体の外部からその空間内に入って、容器移載装置のメインテナンス作業を容易に行うことができ、或いは容器移載装置の故障時等に、当該容器移載装置に対向する位置に配置された容器を保管庫の外部に取り出す作業を容易に行ったりすることなどができる。その結果、第1比較例のように各棚と筐体の4つの側面との間に対して、そのような各種作業を実施するための空間Ezbを設ける必要がなくなる。
【発明を実施するための最良の形態】
【0023】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0024】
[第1実施形態]
(保管庫システムの構成)
まず、図1乃至図3を参照して、本発明の第1実施形態に係る保管庫システム100の構成について説明する。
【0025】
図1は、本発明の第1実施形態に係る保管庫システム100の外観構成を模式的に示す斜視図である。図2は、保管庫システム100の高さ方向に沿った一断面図であると共に、入庫用受け渡し機構13を通る位置で切断した一断面図を示す。図3(a)は、図2の切断線A−A’に沿った保管庫システム100の平面図であり、特に、保管庫1の構成要素である、容器移載装置15と複数の受け渡し機構13、14と複数の棚12との相対的な位置関係を示す。図3(b)は、図2の切断線B−B’に沿った保管庫システム100の平面図であり、特に、容器移載装置15と複数の棚12との相対的な位置関係を示す。なお、図3(a)及び(b)では、保管庫1と搬送装置2との平面的な位置関係についての理解を容易とするため、搬送装置2の位置を一点鎖線にて図示することにしている。
【0026】
保管庫システム100は、半導体工場や液晶工場等のクリーンルーム内に設置され、保管庫1と、搬送装置2と、コントローラ3と、を備える。
【0027】
(保管庫の構成)
まず、保管庫1の構成は次の通りである。
【0028】
保管庫1は、第1の階層F1における床7aの上に設置され、第1の階層F1から第3の階層F3にかけて聳え立つように設けられる。ここで、第1の階層F1の天井7bは、第2の階層F2の床でもあり、その天井7bには開口H1が設けられる。また、第2の階層F2の天井7cは第3の階層F3の床でもあり、その天井7cには開口H2が設けられる。第3の階層F3の天井7dにはそのような開口は設けられていない。なお、本発明では、保管庫1は1つの階層のみに設けられていても構わないし、或いは、3つ以上の階層に跨るように設けられていても構わない。
【0029】
具体的に、保管庫1は、筺体11と、複数の棚12と、入庫用受け渡し機構(第1の受け渡し機構又は入庫用ポート)13と、出庫用受け渡し機構(第2の受け渡し機構又は出庫用ポート)14と、容器移載装置(容器搬送装置)15と、を備える。
【0030】
筺体11は、アルミニウムなどの金属素材等により形成され、4つの側面(11a、11b、11c、11d)を含む箱状の形状を有する。筐体11は、開口H1、H2を介して第1の階層F1から第3の階層F3にかけて聳え立つように設けられる。筐体11の上面(天面)11uは、第3の階層F3において、その天井7dに近接する位置に配置されている。筺体11は、複数の棚12及び容器移載装置15を収容している。第1の階層F1、第2の階層F2及び第3の階層F3の各階層における筺体11の側面11aには、それぞれ、筐体11の外部(例えば、後述する搬送車22など)との間で容器5の受け渡しを行うための開口11kが設けられている。また、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筐体11の4つの側面(11a、11b、11c、11d)のうち少なくとも1つの側面には、図示を省略するが、筐体11内に人が作業の為に入り込むための開閉扉が設けられる。
【0031】
各棚12は、筐体11内に配置され、被収容物6を収容する容器(保管物)5を一時的に載置する役割を有する。なお、各棚12の上面には、図示を省略するが、容器5の底面に形成される嵌合部(図示略)に嵌合して容器5の位置規制を行うための他の嵌合部(例えば、周知のキネマティックカップリング機構等)が形成される。本例では、棚12は、筐体11の4つの側面(11a、11b、11c、11d)のうち3つの側面(11a、11b、11d)側の各々において、その3つの側面(11a、11b、11d)の各々の高さ方向に沿う位置に一列状に配置されている。また、棚12の配置を平面的に見た場合、3つの側面(11a、11b、11d)側の各々には、一対の棚12が並列して配置されている。なお、筐体11の側面11aにおいて、入庫用受け渡し機構13及び出庫用受け渡し機構14が配置される領域には、棚12は設けられない。
【0032】
ここで、被収容物6としては、例えば、半導体ウェーハ、液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の各種の基板が挙げられる。また、容器5としては、例えばFOUP、FOSBなどが挙げられる。容器5は、容器本体5aと、蓋5bと、フランジ部5cと、を有する。容器本体5aは、複数の被収容物6を多段状に間隔を開けて収容すると共に、一側面に対して被収容物6を出し入れするための開放部(開口)を有する。蓋5bは、容器本体5aの開放部に対して開閉自在に取り付けられ、容器5内を密閉しパーティクル(微細な塵)から被収容物6を保護する機能等を有する。フランジ部5cは、板形状を有し、容器本体5aの上面側に配置される。フランジ部5cは、搬送車22による容器5の搬送の際に、後述する搬送車22の把持部22dによって把持される部位である。
【0033】
入庫用受け渡し機構13及び出庫用受け渡し機構14は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筺体11の側面11a側に並列して設けられた2つの開口11kの各々に対応する位置に設けられる。入庫用受け渡し機構13及び出庫用受け渡し機構14は、筐体11の外部(例えば搬送車22など)及び容器移載装置15との間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構13及び出庫用受け渡し機構14は、筐体11の側面11a側において、相互に並列して配置されると共に筐体11の外部から各開口11kを通じて筐体11の内部にかけて延在し、その延在方向に容器5を搬送する。
【0034】
入庫用受け渡し機構13は、搬送車22より受け渡された容器5を、当該容器5の向きを変えることなく容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする移動機構13a(本例では搬送用のコンベア)を備える。好適な例では、入庫用受け渡し機構13と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0035】
一方、出庫用受け渡し機構14は、容器移載装置15より受け渡された容器5を、当該容器5の向きを変えることなく筐体11の外部(例えば搬送車22の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車22)に対して受け渡し可能な状態とする移動機構14a(本例では搬送用のコンベア)を備える。好適な例では、出庫用受け渡し機構14と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0036】
容器移載装置15は、筐体11内に配置され、コントローラ3による指示の下、入庫用受け渡し機構13及び出庫用受け渡し機構14と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う役割を有する。具体的に、容器移載装置15は、昇降機構15aと、アーム機構15fと、制御部15eと、を備えて構成される。
【0037】
容器移載装置15の構成要素のうち、アーム機構15fは、保管庫1内において、後述する案内部15aa及び複数の棚12に取り囲まれる位置に配置される。そして、案内部15aa及び複数の棚12の内側には、人が入り込んで作業することが可能な空間Eが形成されている。ここで、作業としては、例えば、容器移載装置15のメインテナンス作業や、容器移載装置15等の故障時などにおいて棚12に載置された容器5を筐体11の外部に取り出す作業などが含まれる。
【0038】
昇降機構15aは、第1の階層F1の床7a付近から筐体11の高さ方向に延在する案内部15aaと、案内部15aaに沿って、即ち筐体11の高さ方向及び当該高さ方向とは逆方向に向けて昇降可能な昇降体15abと、を更に備える。昇降体15abの一端は、筐体11の中心軸L1に位置している。
【0039】
アーム機構15fは、第1のアーム15bと、第2のアーム15cと、ハンド15dと、を備える。
【0040】
第1のアーム15bは、昇降体15abの一端に対して、モーターM1を介して取り付けられている。このため、第1のアーム15bは、昇降体15abの一端を基点に又は筐体11の中心軸L1回りに旋回可能に構成される。第2のアーム15cは、第1のアーム15bの一端に対して、モーターM2を介して取り付けられている。このため、第2のアーム15cは、第1のアーム15bの一端を基点にして旋回可能に構成される。ハンド15dは、容器5の移載時に当該容器5を載置した状態で保持する容器保持部としての機能を有し、第2のアーム15cの一端に対して、モーターM3を介して取り付けられている。このため、ハンド15dは、第2のアーム15cの一端を基点にして旋回可能に構成される。以上の構成を有するアーム機構15fは、縮んだ状態にてモーターM1の回転動作により昇降体15abの一端を基点に旋回しつつ、さらにモーターM1〜M3の協調動作(回転動作)により第1のアーム15b、第2のアーム15c及びハンド15dを伸縮して、指定の棚12との間で容器5の受け渡しを行う。
【0041】
なお、ハンド15dの上面には、図示を省略するが、容器5の底面に形成される嵌合部に嵌合して容器5の位置規制を行うための他の嵌合部(例えば、周知のキネマティックカップリング機構等)が形成される。
【0042】
制御部15eは、例えば案内部15aaの下方に配置される。但し、本発明では、保管庫1における制御部15eの設定位置に限定はない。制御部15eは、図示しないCPU(Central Processing Unit)や、図示しないROM(Read Only Memory)及びRAM(Random Access Memory)等に代表されるメモリなどを備え、コントローラ3による指示の下、昇降機構15a、アーム機構15f等を夫々駆動制御する。
【0043】
(搬送装置の構成)
次に、搬送装置2の構成は次の通りである。
【0044】
搬送装置2は、軌道(レール)21と、搬送車22と、を備える。
【0045】
軌道21は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筐体11の側面11aに隣接する位置に且つ当該側面11aを横断する位置に対応して設けられている。第1の階層F1に設けられた軌道21は、その天井7bに懸垂されている。第2の階層F2に設けられた軌道21は、その天井7cに懸垂されている。第3の階層F3に設けられた軌道21は、その天井7dに懸垂されている。
【0046】
搬送車22としては、例えばOHT(Over head Hoist Transport)が挙げられる。搬送車22は、例えばリニアモータなどの駆動方式により軌道21に沿って側面11aを横断する方向(図2の矢印Y1方向)に走行する。即ち、搬送車22は、入庫用受け渡し機構13及び出庫用受け渡し機構14をこの順に通過するように軌道21を走行する。また、搬送車22は、容器5を、保管庫1に向けて搬送するのに加えて、各種処理装置、各種製造装置、或いは各種検査装置等に向けて搬送する。
【0047】
具体的に、搬送車22は、容器5を収容可能な筐体22aと、懸垂ベルト22bと、懸垂ベルト22bの巻き取り又は巻き戻しを行う懸垂機構22cと、懸垂ベルト22bの一端に設けられ、懸垂機構22cにより昇降され、容器5のフランジ部5cを把持又は開放する把持部22dと、を備える。この搬送車22では、把持部22dにより容器5のフランジ部5cが把持された状態で、懸垂機構22cを通じて懸垂ベルト22bの巻き取り又は巻き戻しを行うことにより、筐体11の高さ方向及び当該高さ方向とは逆方向(図2の矢印Y4方向)に把持部22dが昇降し、これにより容器5の昇降が行われる。
【0048】
本例では、搬送車22は、コントローラ3による入庫指示に従い、入庫ポートとして機能する入庫用受け渡し機構13に対向する位置で停止して、容器5を入庫用受け渡し機構13の上に載置すると共に、コントローラ3による出庫指示に従い、出庫ポートとして機能する出庫用受け渡し機構14に対向する位置で停止して、出庫用受け渡し機構14の上に載置された出庫待ちの容器5を受け取る。
【0049】
(コントローラの構成)
次に、コントローラ3の構成は次の通りである。
【0050】
コントローラ3は、CPU(図示略)、メモリ(図示略)などを備え、半導体等の工程スケジュールに基づいて、保管庫1及び搬送車22に対する各種の制御を行う。例えば、コントローラ3は、半導体等の工程スケジュールに基づいて、保管庫1及び搬送車22に対して容器5の搬送及び入出庫などを指示したりする。
【0051】
(保管庫システムの動作)
次に、図1乃至図5を参照して、第1実施形態に係る保管庫システム100の動作の一例について説明する。
【0052】
図4(a)及び(b)は、それぞれ、図3(b)に対応する保管庫システム100の平面図であり、特に、保管庫システム100の動作例について示す。図5(a)及び(b)は、それぞれ、図4(a)及び(b)の破線領域E1に対応するアーム機構15f及び棚12を含む概略平面図であり、特に、アーム機構15f等による棚12への容器5の移載例について示す。
【0053】
まず、保管庫1への容器5の入庫動作は例えば次の通りである。
【0054】
コントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に懸垂された軌道21を矢印Y1方向に沿って走行する搬送車22、及び保管庫1内の容器移載装置15に対して、保管庫1内に対する容器5の入庫指示を出す。これに基づき、搬送車22は、筐体11の外部に位置する、指定の入庫用受け渡し機構13の上方の位置で停止して、被収容物6を収容している容器5を指定の入庫用受け渡し機構13の移動機構13a上に載置又は受け渡す。
【0055】
一方、このとき、容器移載装置15は、保管庫1内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の回転動作により保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の入庫用受け渡し機構13に向けた状態でアーム機構15fを停止させる。次に、指定の入庫用受け渡し機構13の移動機構13aは、載置された容器5を、当該容器5の向きを変えることなく、開口11kを通して保管庫1内の容器移載装置15に向けて(図3(a)の矢印Y2方向に)移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする。
【0056】
ここで、受け渡し可能な状態としては、例えば移動機構13aが容器5を容器移載装置15に近接する位置まで搬送した後に停止して、その後、容器移載装置15が移動機構13aより容器5を受け取ることが可能となるような状態や、容器移載装置15のハンド15dが移動機構13aの近傍位置に待機しておき、移動機構13aが容器5を容器移載装置15のハンド15d上に直接受け渡すことを可能とする状態などが挙げられる。
【0057】
次に、容器移載装置15は、図3(a)等に示すように、モーターM1〜M3の協調動作によりアーム機構15fを保管庫1内における指定の入庫用受け渡し機構13側(矢印Y2方向とは逆方向である矢印Y3方向)へ伸ばしつつ、容器5をハンド15d上に載せる。次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを縮めて、容器5を載置するハンド15dを保管庫1の中心軸L1側に引き込む。次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1の中心軸L1回りに旋回させて、図4(a)に示すように、ハンド15dを指定の棚12xに向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、図4(b)及び図5(b)に示すように、モーターM1〜M3の協調動作により、図5(a)の矢印に示す特定の軌跡に沿うようにアーム機構15fを指定の棚12x側へ伸ばして、ハンド15dから指定の棚12xへ容器5を移し替える。
【0058】
ここで、図5(a)の矢印に示す特定の軌跡としては、例えば、保管庫1の中心軸L1から棚12xに至る軌跡(区間k1〜k3)において、モーターM1〜M3の協調動作により、区間k1では、アーム機構5fの各要素を直線的に移動させ、また、区間k2では、アーム機構5fの各要素を曲線的に移動させ、さらに、区間k3では、アーム機構5fの各要素を直線的に移動させて、最終的にハンド15dから指定の棚12xへ容器5を移し替える形態が挙げられる。こうして、容器5が指定の棚12x上へ載置され、保管庫1内への容器5の入庫作業が完了する。
【0059】
一方、保管庫1から容器5を出庫させる出庫動作は例えば次の通りである。
【0060】
コントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車22、及び保管庫1内の容器移載装置15に対して、容器5の出庫指示を出す。これに基づき、搬送車22は、筐体11の外側に位置する、指定の出庫用受け渡し機構14の上方の位置で停止(待機)する。
【0061】
一方、このとき、容器移載装置15は、保管庫1内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の動作により保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の棚12に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、モーターM1の回転動作によりアーム機構15fをその中心軸L1回りに旋回させつつ、モーターM1〜M3の協調動作によりアーム機構15fを指定の棚12側へ伸ばして、指定の棚12からハンド15d上へ容器5を移し替える。次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを縮めて、容器5を載置するハンド15dを中心軸L1側に引き込む。
【0062】
次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の出庫用受け渡し機構14に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、縮めた状態にあるアーム機構15fを、モーターM1〜M3の協調動作により指定の出庫用受け渡し機構14側(図3(a)の矢印Y3方向)へ伸ばしつつ、ハンド15dから、保管庫1内に位置する出庫用受け渡し機構14の移動機構14a上に容器5を移載する。次に、指定の出庫用受け渡し機構14の移動機構14aは、載置された容器5を、当該容器5の向きを変えることなく開口11kを通して筐体11の外部(例えば搬送車22の存在する方向)に向けて(矢印Y3方向に)移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車22)に対して受け渡し可能な状態とする。
【0063】
ここで、受け渡し可能な状態としては、例えば移動機構14aが容器5を保管庫1の外部であって且つ待機状態にある搬送車22と平面的に重なる位置まで移動させた後に停止して、その後、搬送車22が移動機構14aより容器5を受け取ることが可能となる状態などが挙げられる。
【0064】
次に、待機状態にある搬送車22は、指定の出庫用受け渡し機構14の移動機構14a上に載置された容器5を収容する。こうして、保管庫1に対する容器5の出庫作業が完了する。次に、搬送車22は、その容器5を各種の製造装置等に向けて搬送する。
【0065】
次に、第1比較例と比較した、第1実施形態に係る保管庫システム100の作用効果の一例について説明する。
【0066】
(第1比較例に係る保管庫システムの構成)
まず、図6を参照して、第1比較例に係る保管庫システム100zの構成及びその課題について述べる。
【0067】
図6(a)は、図3(a)に対応する、第1比較例に係る保管庫システム100zの構成を示す平面図である。図6(b)は、図3(b)に対応する、保管庫システム100zの構成を示す平面図である。なお、図6(a)及び(b)では、保管庫1zと搬送装置2との平面的な位置関係についての理解を容易とするため、搬送装置2の位置を一点鎖線にて図示することにしている。
【0068】
第1実施形態に係る保管庫システム100と、第1比較例に係る保管庫システム100zとを比較した場合、その両者は、保管庫の構成が異なり、それ以外は同様である。よって、以下では、第1実施形態と同一の要素については同一の符号を付し、その説明は適宜省略する。
【0069】
第1比較例では、保管庫1zは、筺体11と、複数の棚12と、入庫用受け渡し機構(入庫用ポート)13zと、出庫用受け渡し機構(出庫用ポート)14zと、容器移載装置15zと、を備える。
【0070】
棚12は、筐体11内において、その中心軸L1を基点として放射状に且つ筐体11の高さ方向に一列状に配置される。
【0071】
入庫用受け渡し機構13z及び出庫用受け渡し機構14zは、筐体11の外部における搬送車22と容器移載装置15zとの間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構13z及び出庫用受け渡し機構14zは、筐体11の側面11a側の各開口11kにおいて、相互に並列して配置されると共に筐体11の外部から筐体11の内部にかけて延在してなる。また、入庫用受け渡し機構13zは、筐体11の外部から筐体11の内部にかけて水平一方向(矢印Y2方向)に容器5を搬送するコンベア13zaと、容器移載装置15z側に設けられ、水平面上を旋回する旋回ステージ13zbと、を備える。一方、出庫用受け渡し機構14zは、筐体11の内部から筐体11の外部にかけて水平一方向(矢印Y3方向)に容器5を搬送するコンベア14zaと、容器移載装置15z側に設けられ、水平面上を旋回する旋回ステージ14zbと、を備える。
【0072】
容器移載装置15zは、筐体11内に配置され、図示しないコントローラ3による指示の下、入庫用受け渡し機構13zの旋回ステージ13zb及び出庫用受け渡し機構14zの旋回ステージ14zbと、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う役割を有する。
【0073】
具体的に、容器移載装置15zは、案内部15aa及び昇降体15abを有する昇降機構15aと、アーム機構15gと、制御部15eと、を備えて構成される。案内部15aaは、筐体11の隅の位置に配置されている。昇降体15abの一端は筐体11の中心軸L1に位置していると共に、昇降体15abの他端は案内部15aaに昇降可能に支持されている。
【0074】
アーム機構15gは、上記した第1のアーム15bより長さの短い第1のアーム15bxと、上記した第2のアーム15cより長さの短い第2のアーム15cxと、上記したハンド15dより長さの短いハンド15dxと、を備え、保管庫1z内において、案内部15aa及び複数の棚12に取り囲まれる位置に配置される。そして、案内部15aa及び複数の棚12の内側には円形状の平面形状を有する空間Ezaが形成されている。一方、各棚12と筐体11の4つの側面(11a、11b、11c、11d)との間には、筐体11の外部より人が入り込むことが可能な空間Ezbが形成されている。
【0075】
第1のアーム15bxは、昇降体15abの一端に対して、モーターM1を介して取り付けられている。このため、第1のアーム15bは、昇降体15abの一端を基点に又は筐体11の中心軸L1回りに旋回可能に構成される。第2のアーム15cxは、第1のアーム15bの一端に対して、モーターM2を介して取り付けられている。このため、第2のアーム15cは、第1のアーム15bの一端を基点にして旋回可能に構成される。ハンド15dxは、ハンド15dと同様の機能を有し、第2のアーム15cの一端に対して取り付けられている。以上の構成を有するアーム機構15gは、モーターM1の回転動作により昇降体15abの一端を基点に旋回しつつ、モーターM1及びM2の協調動作(回転駆動)により第1のアーム15bx、第2のアーム15cx及びハンド15dxを伸縮して、指定の棚12との間で容器5の受け渡しを行う。
【0076】
(第1比較例に係る保管庫システムの動作)
次に、図6及び図7を参照して、第1比較例に係る保管庫システム100zの動作について説明する。図7(a)及び(b)は、それぞれ、図6(b)に対応する保管庫システム100zの平面図であり、特に、保管庫システム100zの動作例について示す。
【0077】
まず、保管庫1zへの容器5の入庫動作は次の通りである。
【0078】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に懸垂された軌道21を矢印Y1方向に沿って走行する搬送車22、及び保管庫1z内の容器移載装置15zに対して、保管庫1z内に対する容器5の入庫指示を出す。これに基づき、搬送車22は、筐体11の外部に位置する、指定の入庫用受け渡し機構13zのコンベア13zaの上方位置で停止して、容器5を指定の入庫用受け渡し機構13zのコンベア13za上に載置する。
【0079】
一方、このとき、容器移載装置15zは、保管庫1z内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15gをモーターM1の回転動作により保管庫1zの中心軸L1回りに旋回させて、ハンド15dxを指定の入庫用受け渡し機構13zに向けた状態でアーム機構15gを停止させる。次に、指定の入庫用受け渡し機構13zのコンベア13zaは、載置された容器5を、図6(a)の矢印Y2方向に示すように保管庫1z内の容器移載装置15zに向けて水平一方向に搬送し、旋回ステージ13zb上に移す。次に、旋回ステージ13zbは、その上に載置された容器5の蓋5bがハンド15dx側に向くように所定の角度だけ旋回する。
【0080】
次に、容器移載装置15zは、図6(a)においてモーターM2の回転動作によりアーム機構15gを旋回ステージ13zb側へ伸ばして、旋回ステージ13zb上に載置された容器5をハンド15dx上に移し替える。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。次に、容器移載装置15zは、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zの中心軸L1回りに旋回させて、図7(a)に示すようにハンド15dxを指定の棚12xに向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、図7(b)に示すように、モーターM2の回転動作によりアーム機構15gを指定の棚12x側へ伸ばして、ハンド15dxから指定の棚12xへ容器5を移し替える。こうして、保管庫1z内への容器5の入庫作業が完了する。
【0081】
一方、保管庫1zから容器5を出庫させる出庫動作は次の通りである。
【0082】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車22、及び保管庫1z内の容器移載装置15zに対して、容器5の出庫指示を出す。これに基づき、搬送車22は、筐体11の外側に位置する、指定の出庫用受け渡し機構14zのコンベア14zaの上方位置で停止(待機)する。
【0083】
一方、このとき、容器移載装置15zは、保管庫1z内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zの中心軸L1回りに旋回させて、ハンド15dxを指定の棚12xに向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、モーターM1の回転動作によりアーム機構15gをその中心軸L1回りに旋回させつつ、モーターM2の回転動作によりアーム機構15gを指定の棚12x側へ伸ばして、指定の棚12xからハンド15dx上への容器5の移し替えを行う。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。
【0084】
次に、容器移載装置15zは、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zの中心軸L1回りに旋回させて、ハンド15dxを指定の出庫用受け渡し機構14zの旋回ステージ14zbに向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、縮めた状態にあるアーム機構15gを、モーターM2の回転動作により指定の出庫用受け渡し機構14の旋回ステージ14zb側へ伸ばしつつ、ハンド15dxから、旋回ステージ14zb上に容器5を移載する。次に、旋回ステージ14zbは、その上に載置された容器5の蓋5bが筐体11の側面11cと対面するように所定の角度だけ旋回する。次に、指定の出庫用受け渡し機構14zのコンベア14zaは、旋回ステージ14zbの上に載置された容器5を保管庫1zの外部に向けて水平一方向に搬送する。次に、指定の出庫用受け渡し機構14zのコンベア14zaは、容器5を、保管庫1zの外部であって且つ待機状態にある搬送車22と平面的に重なる位置まで移動させた後に停止する。
【0085】
次に、その停止位置で待機状態にある搬送車22は、指定の出庫用受け渡し機構14のコンベア14za上に載置された容器5を収容する。こうして、保管庫1zに対する容器5の出庫作業が完了する。
【0086】
以上に述べた第1比較例では、入庫用受け渡し機構(入庫用ポート)13zは、コンベア13zaに加えて、旋回ステージ13zbを有している。また、出庫用受け渡し機構(出庫用ポート)14zは、コンベア14zaに加えて、旋回ステージ14zbを有している。よって、第1比較例では、入出庫用ポートに対して、旋回ステージ13zb、14zbを設けている分だけ、保管庫1zのコストが増加してしまうといった課題がある。
【0087】
これに対し、第1実施形態では、入庫用受け渡し機構(入庫用ポート)13は、搬送車22より受け渡された容器5を、当該容器5の向きを変えることなく容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする移動機構13a(本例では搬送用のコンベア)を備える。好適な例では、入庫用受け渡し機構13と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0088】
また、第1実施形態では、出庫用受け渡し機構(出庫用ポート)14は、容器移載装置15より受け渡された容器5を、当該容器5の向きを変えることなく筐体11の外部(例えば搬送車22の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車22)に対して受け渡し可能な状態とする移動機構14a(本例では搬送用のコンベア)を備える。好適な例では、出庫用受け渡し機構14と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0089】
これらの構成によれば、入庫用ポートに対して、第1比較例のような容器5の方向転換を行うための旋回ステージ13zb、14zbを必要としない。よって、第1実施形態によれば、そのような旋回ステージ13zb、14zbを設けない分だけ、第1比較例と比べ保管庫1のコストを削減することができる。つまり、第1実施形態では、第1比較例と比べて、入出庫ポート(入庫用受け渡し機構13z及び出庫用受け渡し機構14)における駆動機構の数の削減により保管庫1のコストを削減することができる。また、駆動機構の数を削減することができるので、入出庫ポートの故障等に対する信頼性を向上させることができ、ひいては保管庫1の故障等に対する信頼性を向上させることができる。
【0090】
また、第1比較例では、図6(b)等に示すように、棚12は、筐体11内において、その中心軸L1を基点として放射状に且つ筐体11の高さ方向に一列状に配置される。このため、複数の棚12及び案内部15aaの内側に形成される空間Ezaは非常に小さくなっている。そのため、第1比較例では、人が筐体11の外部からその空間Eza内に入って、容器移載装置15zのメインテナンス作業を実施したり、容器移載装置15zの故障時において容器5を保管庫1zの外部へ取り出す作業等を実施したりすることは困難であるといった課題がある。
【0091】
これに対して、第1実施形態では、図3(b)等に示すように、棚12は、筐体11の4つの側面(11a、11b、11c、11d)のうち3つの側面(11a、11b、11d)側の各々において、その3つの側面(11a、11b、11d)の各々の高さ方向に沿う位置に一列状に配置されている。また、棚12の配置を平面的に見た場合、3つの側面(11a、11b、11d)側の各々には、一対の棚12が並列して配置されている。ここで、第1実施形態において筐体11の大きさは、第1比較例と同様である。
【0092】
これにより、複数の棚12及び案内部15aaの内側に形成される空間Eは、第1比較例に係る空間Ezaと比べて大きくなる。そのため、人が筐体11の外部からその空間E内に入って、容器移載装置15のメインテナンス作業を実施したり、容器移載装置15の故障時において容器5を保管庫1の外部へ取り出す作業等を実施したりすることを容易に行うことができる。その結果、第1比較例のように各棚12と筐体11の4つの側面(11a、11b、11c、11d)との間に対して、そのような各種作業を実施するための空間Ezbを設ける必要がなくなる。
【0093】
なお、第1実施形態では、このように空間Eが大きくなるのに伴って、アーム機構15fの各要素の長さが、対応するアーム機構15gの各要素の長さと比較して大きくなっている。
【0094】
[第2実施形態]
(保管庫システムの構成)
次に、図8及び図9を参照して、本発明の第2実施形態に係る保管庫システム100aの構成について説明する。なお、以下では、第1実施形態と同一の要素については同一の符号を付し、その説明は適宜省略する。
【0095】
図8は、図2に対応する、第2実施形態に係る保管庫システム100aの高さ方向に沿った一断面図であると共に、入庫用受け渡し機構70を通る位置で切断した一断面図を示す。図9は、図8の切断線C−C’に沿った保管庫システム100aの平面図であり、特に、保管庫1aの構成要素である、容器移載装置15と複数の受け渡し機構70、80と複数の棚12との相対的な位置関係を示す。なお、図8の切断線D−D’に沿った保管庫システム100aにかかる、複数の棚12、容器移載装置15及び複数の受け渡し機構70、80の平面的な位置関係は、図2の切断線B−B’に沿った保管庫システム100にかかる、複数の棚12、容器移載装置15及び複数の受け渡し機構13、14の平面的な位置関係と同様であり、その図示は省略する。
【0096】
第2実施形態に係る保管庫システム100aは、第1実施形態に係る保管庫システム100と比較して、搬送装置の構成、並びに保管庫における入庫用受け渡し機構及び出庫用受け渡し機構の各構成が異なり、それ以外は同様である。
【0097】
(搬送装置の構成)
まず、第2実施形態に係る搬送装置30の構成は次の通りである。
【0098】
搬送装置30は、軌道(レール)31と、軌道31を支持する支持部32と、搬送車33と、を備える。
【0099】
軌道31は、第1の階層F1、第2の階層F2及び第3の階層F3の各々において、筐体11の側面11aに隣接する位置に且つ当該側面11aを横断する位置に対応して設けられている。第1の階層F1に設けられた軌道31は、対応する支持部32を通じて天井7bに懸垂されている。第2の階層F2に設けられた軌道31は、対応する支持部32を通じて天井7cに懸垂されている。第3の階層F3に設けられた軌道31は、対応する支持部32を通じて天井7dに懸垂されている。また、第1の階層F1、第2の階層F2及び第3の階層F3の各々における各支持部32は、各開口11k側の側面に対応する位置に開口32kを有する。この各開口32kは、搬送車33と入庫用受け渡し機構70及び出庫用受け渡し機構80との間で容器5の受け渡しを行うための開口として機能する。
【0100】
搬送車33としては、例えばOHS(Over Head Shuttle)が挙げられる。搬送車33は、例えばリニアモータなどの駆動方式により軌道31に沿って側面11aを横断する方向(図9の矢印Y1方向)に走行する。即ち、搬送車33は、軌道31上を、入庫用受け渡し機構70及び出庫用受け渡し機構80をこの順に通過するように走行する。また、搬送車33は、容器5を、保管庫1aに向けて搬送するのに加えて、各種処理装置、各種製造装置、或いは各種検査装置等に向けて搬送する。本例では、搬送車33は、図示しないコントローラ3による入庫指示に従い、入庫ポートとして機能する入庫用受け渡し機構70に隣接する位置で停止(待機)すると共に、コントローラ3による出庫指示に従い、出庫ポートとして機能する出庫用受け渡し機構80に隣接する位置で停止(待機)する。
【0101】
(保管庫の構成)
次に、第2実施形態に係る保管庫1aの構成は次の通りである。
【0102】
保管庫1aは、上記した保管庫1と同様に、第1の階層F1における床7aの上に設置され、第1の階層F1から第3の階層F3にかけて聳え立つように設けられる。なお、本発明では、保管庫1aは1つの階層のみに設けられていても構わないし、或いは、3つ以上の階層を跨るように設けられていても構わない。
【0103】
具体的に、保管庫1aは、筺体11と、複数の棚12と、入庫用受け渡し機構(第1の受け渡し機構又は入庫用ポート)70と、出庫用受け渡し機構(第2の受け渡し機構又は出庫用ポート)80と、容器移載装置15と、を備える。
【0104】
入庫用受け渡し機構70及び出庫用受け渡し機構80は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筺体11の側面11a側に並列して設けられた各開口11kに対応する位置に設けられる。入庫用受け渡し機構70及び出庫用受け渡し機構80は、筐体11の外部、例えば搬送車33及び容器移載装置15との間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構70及び出庫用受け渡し機構80は、筐体11の側面11a側において、相互に並列して配置される。
【0105】
入庫用受け渡し機構70は、入庫用ステージ71と、容器移載装置72と、を有する。入庫用ステージ71は、容器移載装置72を支持すると共に容器移載装置72と容器移載装置15との間で入庫作業を行う際に用いられる台座として機能する。入庫用ステージ71は、筐体11の外部から開口11kを通して筐体11の内部にかけて延在して構成される。
【0106】
容器移載装置72は、コントローラ3による指示の下、搬送車33と容器移載装置15との間で容器5の入庫に伴う移載又は搬送を行う役割を有する。なお、容器移載装置72は、アーム機構15fと同様の構成を有する。即ち、容器移載装置72は、第1のアーム72bと、第2のアーム72cと、ハンド72dと、それらの各要素を回転自在に支持するモーターM1〜M3と、を備える。好適な例では、入庫用受け渡し機構70の容器移載装置72と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0107】
一方、出庫用受け渡し機構80は、出庫用ステージ81と、容器移載装置82と、を有する。出庫用ステージ81は、容器移載装置82を支持すると共に容器移載装置82と容器移載装置15との間で出庫作業を行う際に用いられる台座として機能する。出庫用ステージ81は、筐体11の外部から開口11kを通して筐体11の内部にかけて延在して構成される。
【0108】
容器移載装置82は、コントローラ3による指示の下、搬送車33と容器移載装置15との間で容器5の出庫に伴う移載又は搬送を行う役割を有する。なお、容器移載装置82は、アーム機構15fと同様の構成を有する。即ち、容器移載装置82は、第1のアーム82bと、第2のアーム82cと、ハンド82dと、それらの各要素を回転自在に支持するモーターM1〜M3と、を備える。好適な例では、出庫用受け渡し機構80の容器移載装置82と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0109】
(保管庫システムの動作)
次に、図8乃至図9を参照して、第2実施形態に係る保管庫システム100aの動作の一例について説明する。
【0110】
まず、保管庫1aへの容器5の入庫動作は例えば次の通りである。
【0111】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に支持部32を通じて懸垂された軌道31を矢印Y1方向に沿って走行する搬送車33、並びに保管庫1a内の容器移載装置72及び容器移載装置15に対して、保管庫1a内に対する容器5の入庫指示を出す。これに基づき、搬送車33は、筐体11の外部に位置する、指定の入庫用受け渡し機構70に隣接する位置で停止(待機)する。
【0112】
一方、このとき、容器移載装置15は、保管庫1a内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の回転動作により保管庫1aの中心軸L1回りに旋回させて、ハンド15dを指定の入庫用受け渡し機構70に向けた状態でアーム機構15fを停止させる。次に、容器移載装置72は、ハンド72d等を保管庫1aの外部に位置する、搬送車33側(矢印Y2方向とは逆方向である矢印Y3方向)へ開口11k及び32kを通して伸ばしつつ、容器5をハンド72d上に載せる。次に、容器移載装置72は、ハンド72d上に載置された容器5を、矢印Y2方向に示すように当該容器5の向きを変えることなく、保管庫1a内の容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする。
【0113】
ここで、受け渡し可能な状態としては、例えば容器移載装置72が容器5を容器移載装置15に近接する入庫用ステージ71上の位置に載置して、その後、容器移載装置15がその容器5を受け取ることが可能となる状態や、容器移載装置72が容器5を入庫用ステージ71上に載置することなく、容器移載装置15のハンド15d上に直接受け渡す状態などが挙げられる。
【0114】
次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを保管庫1a内における指定の入庫用受け渡し機構70の入庫用ステージ71側(矢印Y2方向とは逆方向である矢印Y3方向)へ伸ばしつつ、容器5をハンド15d上に載せる。次に、容器移載装置15は、モーターM1〜M3の協調動作により容器5を載置するハンド15dを保管庫1aの中心軸L1側に引き込む。次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1aの中心軸L1回りに旋回させて、ハンド15dを指定の棚12に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、モーターM1〜M3の協調動作により、上記した特定の軌跡に沿うようにアーム機構15fを指定の棚12側へ伸ばして、ハンド15dから指定の棚12へ容器5を移し替える。こうして、容器5が指定の棚12上へ載置され、保管庫1a内への容器5の入庫作業が完了する。
【0115】
一方、保管庫1aから容器5を出庫させる出庫動作は例えば次の通りである。
【0116】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車33、並びに保管庫1a内の容器移載装置82及び容器移載装置15に対して、容器5の出庫指示を出す。これに基づき、搬送車33は、筐体11の外側に位置する、指定の出庫用受け渡し機構80に隣接する位置で停止(待機)する。
【0117】
一方、このとき、容器移載装置15は、保管庫1a内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の動作により保管庫1aの中心軸L1回りに旋回させて、ハンド15dを指定の棚12に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、モーターM1の回転動作によりアーム機構15fをその中心軸L1回りに旋回させつつ、モーターM1〜M3の協調動作により、アーム機構15fを指定の棚12側へ伸ばして、指定の棚12からハンド15d上へ容器5を移し替える。次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを縮めて、容器5を載置するハンド15dを中心軸L1側に引き込む。
【0118】
次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の出庫用受け渡し機構80に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、縮めた状態にあるアーム機構15fを、モーターM1〜M3の協調動作により指定の出庫用受け渡し機構80の出庫用ステージ81側(矢印Y3方向)へ伸ばしつつ、ハンド15dから、保管庫1a内に位置する出庫用ステージ81上に容器5を載せる。次に、容器移載装置82は、ハンド82d等を出庫用ステージ81側(矢印Y2方向)へ伸ばしつつ、ハンド82d上に容器5を載せる。
【0119】
次に、容器移載装置82は、ハンド82d上に載置された容器5を、矢印Y3方向に示すように当該容器5の向きを変えることなく、開口11k及び32kを通して筐体11の外部(例えば搬送車33の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車33)に対して受け渡し可能な状態とする。
【0120】
ここで、受け渡し可能な状態としては、例えば容器移載装置82が容器移載装置15より受け渡された容器5を搬送車33上に載置して搬送車33に当該容器5を直接受け渡すことなどが挙げられる。こうして、保管庫1aに対する容器5の出庫作業が完了する。次に、搬送車33は、その容器5を各種の製造装置等に向けて搬送する。
【0121】
次に、第2比較例と比較した、第2実施形態に係る保管庫システム100aの作用効果の一例について説明する。
【0122】
(第2比較例に係る保管庫システムの構成)
まず、図10を参照して、第1比較例と比較した、第2比較例に係る保管庫システム100zaの構成及びその課題について述べる。
【0123】
図10(a)は、図6(a)に対応する、第2比較例に係る保管庫システム100zaの構成を示す平面図である。
【0124】
第2比較例に係る保管庫システム100zaと、上記した第1比較例に係る保管庫システム100zとを比較した場合、その両者は、主に、保管庫の構成のうち、入庫用受け渡し機構及び出庫用受け渡し機構の構成が異なり、それ以外は同様である。よって、以下では、第1比較例と同一の要素については同一の符号を付し、その説明は適宜省略する。
【0125】
第2比較例に係る保管庫1zaにおいて、入庫用受け渡し機構70z及び出庫用受け渡し機構80zは、筐体11の外部における搬送車33と容器移載装置15zとの間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構70z及び出庫用受け渡し機構80zは、筐体11の側面11a側の各開口11kに対応する位置において、相互に並列して配置される。
【0126】
入庫用受け渡し機構70zは、旋回ステージ71と、容器移載装置72と、を有する。 旋回ステージ71は、筐体11内における容器移載装置15z側に設けられ、水平面において旋回可能に構成される。旋回ステージ71は、後述する容器移載装置72を通じて容器5が受け渡された場合に、その容器5の蓋5bがハンド15dx側に向くように所定の角度だけ旋回する。容器移載装置72は、入庫用受け渡し機構70zにおいて筐体11の側面11a側に配置される。
【0127】
一方、出庫用受け渡し機構80zは、入庫用受け渡し機構70zと同様の構成であり、旋回ステージ81と、容器移載装置82と、を有する。旋回ステージ81は、出庫用受け渡し機構80zにおいて筐体11内における容器移載装置15z側に設けられ、水平面において旋回可能に構成される。旋回ステージ81は、容器移載装置15zを通じて容器5が受け渡された場合に、その容器5の蓋5bが筐体11の側面11cと対面するように所定の角度だけ旋回する。容器移載装置82は、出庫用受け渡し機構80zにおいて筐体11の側面11a側に配置される。
【0128】
(第2比較例に係る保管庫システムの動作)
次に、図10等を参照して、第2比較例に係る保管庫システム100zaの動作について説明する。
【0129】
まず、保管庫1zaへの容器5の入庫動作は次の通りである。
【0130】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に支持部32を通じて懸垂された軌道31上を矢印Y1方向に沿って走行する搬送車33、並びに保管庫1za内の容器移載装置72及び容器移載装置15zに対して、保管庫1za内に対する容器5の入庫指示を出す。これに基づき、搬送車33は、筐体11の外部に位置する、指定の入庫用受け渡し機構70zに隣接する位置で停止(待機)する。
【0131】
一方、このとき、容器移載装置15zは、保管庫1za内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15gをモーターM1の回転動作により保管庫1zaの中心軸L1回りに旋回させて、ハンド15dxを指定の入庫用受け渡し機構70zに向けた状態でアーム機構15gを停止させる。次に、容器移載装置72は、ハンド72d等を開口11k及び32kを通して保管庫1zaの外部に位置する、搬送車33側(矢印Y2方向とは逆方向である矢印Y3方向)へ伸ばしつつ、容器5をハンド72d上に載せる。次に、容器移載装置72は、ハンド72d上に載置された容器5を、開口11k及び32kを通して保管庫1za内の容器移載装置15zに向けて移動又は搬送して、旋回ステージ71上に載置する。次に、旋回ステージ71は、容器5の蓋5bがハンド15dx側に向くようにその中心軸L回りに旋回する。
【0132】
次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを旋回ステージ71側へ伸ばして、旋回ステージ71上に載置された容器5をハンド15dx上に載置する。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。次に、容器移載装置15zは、上記した第1比較例と同様の方法により指定の棚12へ容器5を載置する。こうして、保管庫1za内への容器5の入庫作業が完了する。
【0133】
一方、保管庫1zaから容器5を出庫させる出庫動作は次の通りである。
【0134】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車33、並びに保管庫1za内の容器移載装置82及び容器移載装置15zに対して、容器5の出庫指示を出す。これに基づき、搬送車33は、筐体11の外側に位置する、指定の出庫用受け渡し機構80zに隣接する位置で停止(待機)する。
【0135】
一方、このとき、容器移載装置15zは、保管庫1za内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zaの中心軸L1回りに旋回させて、ハンド15dxを指定の棚12に向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、モーターM1の回転動作によりアーム機構15gをその中心軸L1回りに旋回させつつ、モーターM2の回転動作によりアーム機構15gを指定の棚12側へ伸ばして、指定の棚12からハンド15dx上へ容器5を移し替える。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。
【0136】
次に、容器移載装置15zは、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zaの中心軸L1回りに旋回させて、ハンド15dxを指定の出庫用受け渡し機構14zの旋回ステージ81に向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、縮めた状態にあるアーム機構15gを、モーターM2の回転動作により指定の出庫用受け渡し機構80zの旋回ステージ81側へ伸ばしつつ、ハンド15dxから、保管庫1za内に位置する旋回ステージ81上に容器5を移載する。次に、旋回ステージ81は、容器5の蓋5bが筐体11の側面11cと対面するように所定の角度だけ旋回する。次に、容器移載装置82は、ハンド82d等を旋回ステージ81側へ伸ばしつつ、ハンド82d上に容器5を載せる。
【0137】
次に、容器移載装置82は、ハンド82c上に載置された容器5を、開口11k及び32kを通して筐体11の外部(例えば搬送車33の存在する方向)に向けて移動又は搬送して、容器5を搬送車33上に載置する。こうして、保管庫1zaに対する容器5の出庫作業が完了する。次に、搬送車33は、その容器5を各種の製造装置等に向けて搬送する。
【0138】
以上に述べた第2比較例では、入庫用受け渡し機構(入庫用ポート)70zは、容器移載装置72に加えて、旋回ステージ71を有している。また、出庫用受け渡し機構(出庫用ポート)80zは、容器移載装置82に加えて、旋回ステージ81を有している。よって、第2比較例では、入出庫用ポートに対して、旋回ステージ71、81を設けている分だけ、保管庫1zaのコストが増加してしまうといった課題がある。
【0139】
これに対し、第2実施形態では、入庫用受け渡し機構(入庫用ポート)70は、搬送車33から受け取った容器5を、当該容器5の向きを変えることなく容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする移動機構(本例では容器移載装置72)を備える。好適な例では、入庫用受け渡し機構70と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0140】
また、第2実施形態では、出庫用受け渡し機構(出庫用ポート)80は、容器移載装置15より受け渡された容器5を、当該容器5の向きを変えることなく筐体11の外部(例えば搬送車33の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車33)に対して受け渡し可能な状態とする移動機構(本例では容器移載装置82)を備える。好適な例では、出庫用受け渡し機構80と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0141】
これらの構成によれば、入出庫用ポートに対して、第2比較例のような容器5の方向転換を行うための旋回ステージ71、81を必要としない。よって、第2実施形態によれば、そのような旋回ステージ71、81を設けない分だけ、第2比較例と比べ保管庫1aのコストを削減することができる。つまり、第2実施形態では、第2比較例と比べて、入出庫ポート(入庫用受け渡し機構70及び出庫用受け渡し機構80)における駆動機構の数の削減により保管庫1aのコストを削減することができる。また、駆動機構の数を削減することができるので、入出庫ポートの故障等に対する信頼性を向上させることができ、ひいては保管庫1aの故障等に対する信頼性を向上させることができる。
【0142】
また、第2比較例では、棚12は、第1比較例と同様に、筐体11内において、その中心軸L1を基点として放射状に且つ筐体11の高さ方向に一列状に配置される。このため、複数の棚12及び案内部15aaの内側に形成される空間Ezaは非常に小さくなっている。そのため、第2比較例では、第1比較例と同様に、人が筐体11の外部からその空間Eza内に入って、容器移載装置15zのメインテナンス作業等を実施したりすることは困難であるといった課題がある。
【0143】
これに対して、第2実施形態では、第1実施形態と同様に、棚12は、筐体11の4つの側面(11a、11b、11c、11d)のうち3つの側面(11a、11b、11d)側の各々において、その3つの側面(11a、11b、11d)の各々の高さ方向に沿う位置に一列状に配置されている。また、棚12の配置を平面的に見た場合、3つの側面(11a、11b、11d)側の各々には、一対の棚12が並列して配置される。ここで、第2実施形態において筐体11の大きさは、第2比較例と同様である。
【0144】
これにより、複数の棚12及び案内部15aaの内側に形成される空間Eは、第2比較例に係る空間Ezaと比べて大きくなる。そのため、人が筐体11の外部からその空間E内に入って、容器移載装置15のメインテナンス作業を実施したり、容器移載装置15の故障時において容器5を保管庫1aの外部へ取り出す作業等を実施したりすることを容易に行うことができる。その結果、第2比較例のように各棚12と筐体11の4つの側面(11a、11b、11c、11d)との間に対して、そのような各種作業を実施するための空間Ezbを設ける必要がなくなる。
【0145】
なお、第2実施形態では、このように空間Eが大きくなるのに伴って、アーム機構15fの各要素の長さが、対応するアーム機構15gの各要素の長さと比較して大きくなっている。
[変形例]
なお、本発明では、その趣旨を逸脱しない範囲で、種々の変形をすることが可能である。
【0146】
例えば、本発明では、第1実施形態に係る保管庫1に対して、第2実施形態に係る搬送装置30を適用してもよく、或いは、第1実施形態に係る搬送装置2及び第2実施形態に係る搬送装置30の両方を混在させてもよい。また、本発明では、第2実施形態に係る保管庫1aに対して、第1実施形態に係る搬送装置2を適用してもよく、或いは、第1実施形態に係る搬送装置2及び第2実施形態に係る搬送装置30の両方を混在させてもよい。
【0147】
また、上記の第1実施形態では、搬送装置2は保管庫1の外部において保管庫1に隣接する位置に設けられていた。また、上記の第2実施形態では、搬送装置30は保管庫1aの外部において保管庫1aに隣接する位置に設けられていた。これに限らず、本発明では、搬送装置の一部を保管庫の内部に設けるようにしてもよい。
【0148】
かかる構成を、第1実施形態に係る保管庫システム100に適用した例について図11(a)を参照して説明する。図11(a)は、図2の第1の階層F1に対応する、変形例に係る保管庫システム100bの断面図を示す。
【0149】
変形例に係る保管庫システム100bと、第1実施形態に係る保管庫システム100とを比較した場合、変形例に係る保管庫システム100bでは、主に、搬送装置2の一部を保管庫1の内部に設けるようにしている点、保管庫1に対し入庫用受け渡し機構(入庫ポート)13及び出庫用受け渡し機構(出庫ポート)14を設けていない点等が第1実施形態と異なり、それ以外は第1実施形態と同様である。よって、以下では、第1実施形態と同一の要素については同一の符号を付し、その説明は省略する。
【0150】
保管庫システム100bでは、一部図示を省略しているが、第1の階層F1、第2の階層F2及び第3の階層F3の各階層における保管庫1の筐体11に対して、軌道21に沿って搬送車22を通過させるための複数の開口(11ba、11da)が設けられる。具体的には、開口11baは、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筐体11の側面11bに設けられていると共に、開口11daは、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、側面11bと対面する側面11dに設けられている。また、保管庫システム100bにおいて、搬送装置22の軌道21の一部は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、保管庫1内に位置する天井等に懸垂され、開口11baと開口11daとを貫くように配置されている。これにより、軌道21を沿って走行する搬送車22は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、開口11ba及び開口11daを通じて保管庫1の内部を通過することが可能になっている。
【0151】
以上の構成を有する保管庫システム100bでは、容器移載装置15は、保管庫1への容器5の入出庫の際に、複数の開口(11ba、11da)を通じて保管庫1内に進入した搬送車22との間において、容器5の向きを変えることなく当該容器5の移載を直接的に行う。
【0152】
具体的には、保管庫1に対し容器5を入庫する際には、開口11daを通じて保管庫1内に進入した搬送車22は、保管庫1内で停止(待機)する。次に、容器移載装置15は、進入した搬送車22から入庫用の容器5を当該容器5の向きを変えることなく直接受け取る。次に、容器移載装置15は、その受け取った容器5を指定の棚12に載置する。こうして、保管庫1に対する容器5の入庫作業が完了する。
【0153】
一方、保管庫1から容器5を出庫する際には、開口11daを通じて保管庫1内に進入した搬送車22は、保管庫1内で停止(待機)する。次に、容器移載装置15は、指定の棚12から取り出した出庫用の容器5を当該容器5の向きを変えることなく搬送車22に直接受け渡す。こうして、保管庫1に対する容器5の出庫作業が完了する。なお、その受け渡された容器5を搬送する搬送車33は、開口11baを通過して保管庫1の外部に移動し、当該容器5を各種の製造装置等に向けて搬送する。
【0154】
これによれば、保管庫1に対して、入庫用受け渡し機構(入庫ポート)13及び出庫用受け渡し機構(出庫ポート)14を設ける必要がないので、その分、保管庫1のコストをより削減することができると共に、保管庫1の故障等に対する信頼性の向上に寄与し得る。
【0155】
次に、搬送装置の一部を保管庫の内部に設けた構成を、第2実施形態に係る保管庫システム100aに適用した例について図11(b)を参照して説明する。図11(b)は、図8の第1の階層F1に対応する、変形例に係る保管庫システム100cの断面図を示す。
【0156】
変形例に係る保管庫システム100cと、第2実施形態に係る保管庫システム100aとを比較した場合、変形例に係る保管庫システム100cでは、主に、搬送装置30の一部を保管庫1aの内部に設けるようにしている点、保管庫1aに対し入庫用受け渡し機構70及び出庫用受け渡し機構80を設けていない点等が第2実施形態と異なり、それ以外は第2実施形態と同様である。よって、以下では、第2実施形態と同一の要素については同一の符号を付し、その説明は省略する。
【0157】
保管庫システム100cでは、一部図示を省略しているが、第1の階層F1、第2の階層F2及び第3の階層F3の各階層における保管庫1aの筐体11に対して、搬送装置30の一部を保管庫1a内に配置するための複数の開口(11ba、11da)が設けられる。保管庫1aに対する複数の開口(11ba、11da)の設定位置は、保管庫システム100bと同様である。これにより、軌道31上を走行する搬送車33は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、開口11ba及び開口11daを通じて保管庫1aの内部を通過することが可能になっている。
【0158】
以上の構成を有する保管庫システム100cでは、容器移載装置15は、保管庫1aへの容器5の入出庫の際に、複数の開口(11ba、11da)及び開口32kを通じて保管庫1a内に進入した搬送車33との間において、容器5の向きを変えることなく当該容器5の移載を直接的に行う。
【0159】
具体的には、保管庫1aに対し容器5を入庫する際には、開口11daを通じて保管庫1a内に進入した搬送車33は、搬送装置30の開口32kに対応する位置で停止(待機)する。次に、容器移載装置15は、進入した搬送車33から入庫用の容器5を、当該容器5の向きを変えることなく開口32kを通して直接受け取る。次に、容器移載装置15は、その受け取った容器5を指定の棚12に載置する。こうして、保管庫1aに対する容器5の入庫作業が完了する。
【0160】
一方、保管庫1aから容器5を出庫する際には、開口11daを通じて保管庫1a内に進入した搬送車33は、開口32kに対応する位置で停止(待機)する。次に、容器移載装置15は、指定の棚12から取り出した出庫用の容器5を、当該容器5の向きを変えることなく開口32kを通して搬送車33に直接受け渡す。こうして、保管庫1aに対する容器5の出庫作業が完了する。なお、その受け渡された容器5を搬送する搬送車33は、開口11baを通過して保管庫1aの外部に移動し、当該容器5を各種の製造装置等に向けて搬送する。
【0161】
これによれば、保管庫1aに対して、入庫用受け渡し機構(入庫ポート)70及び出庫用受け渡し機構(出庫ポート)80を夫々設ける必要がないので、その分、保管庫1aのコストをより削減することができると共に、保管庫1aの故障等に対する信頼性の向上に寄与し得る。
【0162】
また、本発明では、入庫用受け渡し機構13又は70、及び、出庫用受け渡し機構14又は80と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行うアーム機構は、上記した構成に限らず、例えば直交座標系ロボットであっても構わない。以下、この構成例について、図12を参照して簡単に説明する。
【0163】
図12(a)は、図5(a)に対応する、変形例に係るアーム機構40及び棚12を含む要部平面図を示す。図12(b)は、図5(b)に対応する、変形例に係るアーム機構40及び棚12を含む要部平面図を示す。
【0164】
本変形例は、第1及び第2実施形態に係る保管庫システムと比較して、アーム機構の構成のみが異なる。よって、以下では、第1及び第2実施形態と共通する要素については同一の符号を付し、その説明は省略する。
【0165】
変形例に係るアーム機構40は、いわゆる直交座標系ロボットであり、第1の移動機構41と、第1の移動機構41に対して略直交するように配置され、容器5を載置した状態で支持する第2の移動機構42と、を備える。第1の移動機構41は、その中央部がモーターM1を介して昇降体15abの一端に取り付けられている。このため、第1の移動機構41は、昇降体15abの一端を基点に又は保管庫1若しくは1aの中心軸L1を中心に旋回可能に構成される。第1の移動機構41は、水平一方向に第2の移動機構42を移動させる機構であり、具体的に、第2の移動機構42を、第1の移動機構41の延在方向Y30に沿って移動させる機能を有する。第2の移動機構42は、水平一方向に容器5を移動させる機構であり、具体的に、容器5を第1の移動機構41の延在方向Y30と直交する方向Y31に沿って移動させる機能を有する。
【0166】
以上の構成を有するアーム機構40は、モーターM1の回転動作により第1の移動機構41及び第2の移動機構42を保管庫1若しくは1aの中心軸L1を中心に旋回させつつ、第1の移動機構41及び第2の移動機構42の協調動作により入庫用受け渡し機構13又は70、及び、出庫用受け渡し機構14又は80と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う。
【0167】
例えば、図12(a)の状態(縮んだ状態)にあるアーム機構40が、指定の棚12xに対して容器5を移載するには次のようにして行う。まず、モーターM1の回転動作により、第2の移動機構42が指定の棚12xに向かうように、第1の移動機構41を所定の角度だけ旋回させる。次に、第1の移動機構41は、図12(b)に示すように、第2の移動機構42が指定の棚12x側と対向する位置まで、第2の移動機構42を水平一方向に移動させる。次に、第2の移動機構42は、容器5を指定の棚12xに向けて水平一方向に移動させる。こうして、指定の棚12xに容器5を載置することが可能となる。
【0168】
また、本発明では、上記した変形例に係るアーム機構の構成に限定されず、アーム機構は、水平一方向にのみ移動可能な移動機構だけで構成されていても構わない。この構成例について、図13を参照して簡単に説明する。
【0169】
図13(a)は、図12(a)に対応する、他の変形例に係るアーム機構43及び棚12を含む要部平面図を示す。図13(b)は、図12(b)に対応する、他の変形例に係るアーム機構43及び棚12を含む要部平面図を示す。
【0170】
本変形例は、第1及び第2実施形態に係る保管庫システムと比較して、アーム機構の構成及び棚12の配置のみが異なる。よって、以下では、第1及び第2実施形態と共通する要素については同一の符号を付し、その説明は省略する。
【0171】
変形例に係るアーム機構43は、容器5を載置した状態で支持する移動機構44を備える。移動機構44は、その中央部がモーターM1を介して昇降体15abの一端に取り付けられている。このため、移動機構44は、昇降体15abの一端を基点に又は保管庫1若しくは1aの中心軸L1を中心に旋回可能に構成される。移動機構44は、水平一方向に容器5を移動させる機構であり、具体的に、容器5を移動機構44の延在方向Y31に沿って移動させる機能を有する。また、棚12は、保管庫1若しくは1aの中心軸L1を中心に放射状に且つ保管庫1若しくは1aの高さ方向に列状に配置される。
【0172】
以上の構成を有するアーム機構43は、モーターM1の回転動作により移動機構44を保管庫1若しくは1aの中心軸L1を中心に旋回させつつ、移動機構44の動作により入庫用受け渡し機構13又は70、及び、出庫用受け渡し機構14又は80と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う。
【0173】
例えば、図13(a)の状態(縮んだ状態)にあるアーム機構43が、指定の棚12xに対して容器5を移載するには次のようにして行う。まず、モーターM1の回転動作により、移動機構44が指定の棚12xに向かうように、移動機構44を所定の角度だけ旋回させる。次に、移動機構44は、図13(b)に示すように、容器5を指定の棚12xに向けて水平一方向に移動させる。こうして、指定の棚12xに容器5を載置することが可能となる。
【図面の簡単な説明】
【0174】
【図1】本発明の第1実施形態に係る保管庫システムの外観構成を示す斜視図。
【図2】第1実施形態に係る保管庫システムの高さ方向に沿った一断面図。
【図3】第1実施形態に係る保管庫システムの各種平面図。
【図4】第1実施形態に係る保管庫システムの動作例を示す各種平面図。
【図5】保管庫システムの棚に対するアーム機構の動作例を示す各種平面図。
【図6】第1比較例に係る保管庫システムの各種平面図。
【図7】第1比較例に係る保管庫システムの動作例を示す各種平面図。
【図8】第2実施形態に係る保管庫システムの高さ方向に沿った一断面図。
【図9】第2実施形態に係る保管庫システムの一平面図。
【図10】第2比較例に係る保管庫システムの一平面図。
【図11】本発明の各種変形例に係る保管庫システムの高さ方向に沿った各種断面図。
【図12】本発明の変形例に係るアーム機構及び棚を含む要部平面図。
【図13】本発明の他の変形例に係るアーム機構及び棚を含む要部平面図。
【符号の説明】
【0175】
1、1a 保管庫、 2、30 搬送装置、 3 コントローラ、 5 容器、 5b 蓋、 6 被収容物、 7a 床、 7b、7c、7d 天井、 11 筐体、 12 棚、 13、70 入庫用受け渡し機構(第1の受け渡し機構)、 13a、14a 移動機構、 14、80 出庫用受け渡し機構(第2の受け渡し機構)、 15、72、82 容器移載装置、 15f、40、43 アーム機構、 21、31 軌道、 22、33 搬送車、 100、100a、100b、100c 保管庫システム、 E 空間
【技術分野】
【0001】
本発明は、搬送装置と保管庫との間で被収容物を収容する容器の受け渡しを行う保管庫システムに関する。
【背景技術】
【0002】
半導体工場などにおいて、搬送装置と保管庫とはシステム的に組み合わされて用いられることが多い。
【0003】
この種の搬送装置は、主に、軌道(レール)と、軌道に沿って走行し、被収容物を収容する容器を搬送する搬送車と、を備えて構成される。ここで、搬送車としては、例えばOHT(Over Head Hoist Transport)やOHS(Over Head Shuttle)などが挙げられる。また、被収容物としては、例えば半導体ウェハーや液晶用基板など各種の基板が挙げられる。また、容器としては、例えばFOUP(Front Open Unified Pod)や、FOSB(Front Opening Shipping Box)などが挙げられる。
【0004】
一方、この種の保管庫は、一般にストッカなどと称され、搬送車より搬送されてきた容器を一時的に保管しておく役割を有する。保管庫は、搬送車が走行する軌道に隣接して配置され、保管庫内には、搬送車により搬送される容器を複数個保管できるような多数の棚が設けられる。また、保管庫には、搬送車との間で容器の受け渡し(即ち、入出庫)を行うための受け渡し部(即ち、入出庫ポート)や、入出庫ポートと指定の棚との間で容器の搬送を行うための容器移載装置などが設けられる。ここで、容器移載装置(又は容器搬送装置)は、一般的に、ストッカロボット、ストッカクレーン等と称される。例えば、特許文献1及び2には、ストッカロボットと縦横無尽に広がる多数の棚とを有するストッカが記載されている。
【0005】
なお、特許文献3には、保管空間の高さ方向への増大を可能とする保管棚装置が記載されている。
【0006】
この保管棚装置は、角型の筐体と、その内部に設けられた円筒棚と、その内部に配備されたスタッカとを備える。円筒棚は、垂直に立設されたフレームに、周方向及び上下方向に多数の保管棚を設け、且つ所定箇所に、外部との間で保管物の受け渡しを行う受け渡し部を設けてなる。円筒棚は、クリーンルーム内に設置され、下端がグレーチング床に設けられた開口を貫通し、床下空間内に延びている。そして、その床下空間の床面には、円筒棚の下端ベース部が固定されていると共に、円筒棚の上端は、クリーンルームの天井に目一杯の高さに設定されている。このような構成を有する保管棚装置において、スタッカは、昇降、旋回、伸縮の3軸の動作で動かされ、保管棚と受け渡し部との間で保管物の受け渡しを行う役割を有する。
【0007】
【特許文献1】特開2006−049454号公報
【特許文献2】特開2003−182815号公報
【特許文献3】特開平10−98094号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、以上の点に鑑みてなされたものであり、保管庫における容器(保管物)の入出庫機構の簡素化によるコスト削減が可能で、且つ保管庫内のメインテナンスなどを容易に行うことが可能な保管庫システムを提供することを課題とする。
【課題を解決するための手段】
【0009】
本発明の1つの観点では、保管庫システムは、筐体と、前記筐体内に配置され、被収容物を収容する容器を載置する棚と、前記筐体の外部との間で前記容器の受け渡しを行う第1及び第2の受け渡し機構と、前記筐体内に配置され、前記第1及び第2の受け渡し機構と前記棚との間で前記容器の移載を行う容器移載装置と、を備え、前記第1の受け渡し機構は、前記筐体の外部より受け渡された前記容器を、当該容器の向きを変えることなく前記容器移載装置に向けて移動して、当該容器を前記容器移載装置に受け渡し可能な状態とする移動機構を備えると共に、前記第2の受け渡し機構は、前記容器移載装置より受け渡された前記容器を、当該容器の向きを変えることなく前記筐体の外部に向けて移動して、当該容器を前記筐体の外部に対して受け渡し可能な状態とする他の移動機構を備える。
【0010】
上記の保管庫システムは、筐体と、筐体内に配置された棚と、第1及び第2の受け渡し機構と、筐体内に配置された容器移載装置と、を備える。棚は被収容物を収容する容器(保管物)を載置する。ここで、容器としては、例えばFOUP、FOSBなどが挙げられる。また、被収容物としては、例えば、半導体ウェーハ、液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の各種の基板が挙げられる。第1及び第2の受け渡し機構は、筐体の外部(例えば、搬送車)との間で容器の受け渡しを行う。容器移載装置は、第1及び第2の受け渡し機構と棚との間で容器の移載を行う。
【0011】
特に、この保管庫システムでは、第1の受け渡し機構は、筐体の外部(例えば搬送車など)より受け渡された容器を、当該容器の向きを変えることなく容器移載装置に向けて移動又は搬送して、当該容器を容器移載装置に受け渡し可能な状態とする移動機構を備える。また、第2の受け渡し機構は、容器移載装置より受け渡された容器を、当該容器の向きを変えることなく筐体の外部(例えば搬送車など)に向けて移動して、当該容器を筐体の外部(例えば搬送車など)に対して受け渡し可能な状態とする他の移動機構を備える。
【0012】
これらの構成によれば、第1及び第2の受け渡し機構(入出庫ポート)において、後述する第1比較例のような容器の方向転換を行うための旋回ステージを必要としない。よって、この構成によれば、そのような旋回ステージを設けない分、保管庫のコストを削減できる。つまり、この保管庫システムでは、第1比較例と比べて、入出庫ポートにおける駆動機構の数の削減により保管庫のコストを削減することができる。また、駆動機構の数を削減することができるので、入出庫ポートの故障等に対する信頼性を向上させることができ、ひいては保管庫の故障等に対する信頼性を向上させることができる。
【0013】
好適な例では、前記容器は、一側面に対して前記被収容物を出し入れするための開放部を有する容器本体と、前記開放部に対して開閉自在に取り付けられる蓋と、を有し、前記第1及び第2の受け渡し機構と、前記筐体の外部及び前記容器移載装置との間では、前記容器の前記蓋が前記筐体の内側に向けられた状態で当該容器の受け渡しが行われる。また、前記移動機構及び前記他の移動機構は、前記筐体の外部から内部にかけて延在する搬送用のコンベアとして構成される。また、前記筐体に隣接する位置に配置された他の軌道と、前記他の軌道に沿って走行する他の搬送車とを有する他の搬送装置を備え、前記第1及び第2の受け渡し機構は、前記筐体の外部において、前記他の搬送車との間で前記容器の受け渡しを行うことが好ましい。
【0014】
本発明の他の観点では、保管庫システムは、軌道及び前記軌道に沿って走行する搬送車を有する搬送装置と、前記搬送車との間で被収容物を収容する容器の受け渡しを行う保管庫と、を備え、前記保管庫は、前記軌道に沿って前記搬送車を通過させるための開口を有する筐体と、前記筐体内に配置され、前記容器を載置する棚と、前記筐体内に配置され、前記容器の移載を行う容器移載装置と、を備え、前記容器移載装置は、前記開口を通じて前記保管庫内に進入した前記搬送車との間において前記容器の移載を直接行う。
【0015】
上記の保管庫システムは、軌道及び軌道に沿って走行する搬送車を有する搬送装置と、搬送車との間で被収容物を収容する容器の受け渡しを行う保管庫と、を備える。ここで、容器としては、例えばFOUP、FOSBなどが挙げられる。また、被収容物としては、例えば、半導体ウェーハ、液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の各種の基板が挙げられる。
【0016】
そして、保管庫は、筐体と、筐体内に配置された棚と、筐体内に配置された容器移載装置と、を備える。筐体は、軌道に沿って搬送車を通過させるための開口を有する。棚は容器を載置する。容器移載装置は容器の移載を行う。
【0017】
特に、この保管庫システムでは、容器移載装置は、前記開口を通じて保管庫内に進入した搬送車との間において容器の移載を直接行う。
【0018】
この構成によれば、保管庫に対して、上記したような第1及び第2の受け渡し機構(入出庫ポート)を設ける必要がないので、その分、保管庫のコストをより削減することができると共に、保管庫の故障等に対する信頼性の向上に寄与し得る。
【0019】
好適な例では、前記容器は、一側面に対して前記被収容物を出し入れするための開放部を有する容器本体と、前記開放部に対して開閉自在に取り付けられる蓋と、を有し、前記容器移載装置は、前記搬送車と前記棚との間において、前記容器の前記蓋が前記筐体の内側に向けられた状態で当該容器の移載を行うことが好ましい。
【0020】
上記の保管庫システムの一つの態様では、前記容器移載装置は、前記筐体の高さ方向及び当該高さ方向とは逆方向に向けて昇降可能な昇降機構と、前記筐体の中心軸に向かって延びる前記昇降機構の一端に支持されたアーム機構と、を備え、前記アーム機構は、前記筐体の中心軸回りに旋回可能に構成されると共に前記筐体の中心軸に近づく方向及び前記筐体の中心軸と離隔する方向に伸縮可能な複数のアームと、前記複数のアームのうち何れかのアームに支持され、前記容器を保持する容器保持部と、を有して構成される。また、前記昇降機構は、前記筐体の高さ方向に延在する案内部と、前記案内部に沿って昇降可能な昇降体と、を備える。
【0021】
上記の保管庫システムの他の態様では、前記筐体は4つの側面を有する箱状の形状を有し、前記4つの側面のうち1つの側面側において、当該1つの側面の高さ方向に沿う位置には前記案内部が配置され、前記4つの側面のうち残りの3つの側面側の各々において、当該3つの側面の各々の高さ方向に沿う位置には、前記棚が間隔をあけて複数配置され、前記アーム機構は、前記案内部及び前記複数の前記棚に取り囲まれる位置に配置され、前記案内部及び前記複数の前記棚の内側には、人が入り込んで作業することが可能な空間が形成されている。ここで、人による作業としては、例えば、容器移載装置のメインテナンス作業や、容器移載装置等の故障時などにおいて棚に載置された容器を筐体の外部に取り出す作業などが含まれる。
【0022】
これにより、複数の棚及び案内部の内側に形成される空間は、後述する第1比較例に係る空間Ezaと比べて大きくなる。そのため、人が筐体の外部からその空間内に入って、容器移載装置のメインテナンス作業を容易に行うことができ、或いは容器移載装置の故障時等に、当該容器移載装置に対向する位置に配置された容器を保管庫の外部に取り出す作業を容易に行ったりすることなどができる。その結果、第1比較例のように各棚と筐体の4つの側面との間に対して、そのような各種作業を実施するための空間Ezbを設ける必要がなくなる。
【発明を実施するための最良の形態】
【0023】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0024】
[第1実施形態]
(保管庫システムの構成)
まず、図1乃至図3を参照して、本発明の第1実施形態に係る保管庫システム100の構成について説明する。
【0025】
図1は、本発明の第1実施形態に係る保管庫システム100の外観構成を模式的に示す斜視図である。図2は、保管庫システム100の高さ方向に沿った一断面図であると共に、入庫用受け渡し機構13を通る位置で切断した一断面図を示す。図3(a)は、図2の切断線A−A’に沿った保管庫システム100の平面図であり、特に、保管庫1の構成要素である、容器移載装置15と複数の受け渡し機構13、14と複数の棚12との相対的な位置関係を示す。図3(b)は、図2の切断線B−B’に沿った保管庫システム100の平面図であり、特に、容器移載装置15と複数の棚12との相対的な位置関係を示す。なお、図3(a)及び(b)では、保管庫1と搬送装置2との平面的な位置関係についての理解を容易とするため、搬送装置2の位置を一点鎖線にて図示することにしている。
【0026】
保管庫システム100は、半導体工場や液晶工場等のクリーンルーム内に設置され、保管庫1と、搬送装置2と、コントローラ3と、を備える。
【0027】
(保管庫の構成)
まず、保管庫1の構成は次の通りである。
【0028】
保管庫1は、第1の階層F1における床7aの上に設置され、第1の階層F1から第3の階層F3にかけて聳え立つように設けられる。ここで、第1の階層F1の天井7bは、第2の階層F2の床でもあり、その天井7bには開口H1が設けられる。また、第2の階層F2の天井7cは第3の階層F3の床でもあり、その天井7cには開口H2が設けられる。第3の階層F3の天井7dにはそのような開口は設けられていない。なお、本発明では、保管庫1は1つの階層のみに設けられていても構わないし、或いは、3つ以上の階層に跨るように設けられていても構わない。
【0029】
具体的に、保管庫1は、筺体11と、複数の棚12と、入庫用受け渡し機構(第1の受け渡し機構又は入庫用ポート)13と、出庫用受け渡し機構(第2の受け渡し機構又は出庫用ポート)14と、容器移載装置(容器搬送装置)15と、を備える。
【0030】
筺体11は、アルミニウムなどの金属素材等により形成され、4つの側面(11a、11b、11c、11d)を含む箱状の形状を有する。筐体11は、開口H1、H2を介して第1の階層F1から第3の階層F3にかけて聳え立つように設けられる。筐体11の上面(天面)11uは、第3の階層F3において、その天井7dに近接する位置に配置されている。筺体11は、複数の棚12及び容器移載装置15を収容している。第1の階層F1、第2の階層F2及び第3の階層F3の各階層における筺体11の側面11aには、それぞれ、筐体11の外部(例えば、後述する搬送車22など)との間で容器5の受け渡しを行うための開口11kが設けられている。また、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筐体11の4つの側面(11a、11b、11c、11d)のうち少なくとも1つの側面には、図示を省略するが、筐体11内に人が作業の為に入り込むための開閉扉が設けられる。
【0031】
各棚12は、筐体11内に配置され、被収容物6を収容する容器(保管物)5を一時的に載置する役割を有する。なお、各棚12の上面には、図示を省略するが、容器5の底面に形成される嵌合部(図示略)に嵌合して容器5の位置規制を行うための他の嵌合部(例えば、周知のキネマティックカップリング機構等)が形成される。本例では、棚12は、筐体11の4つの側面(11a、11b、11c、11d)のうち3つの側面(11a、11b、11d)側の各々において、その3つの側面(11a、11b、11d)の各々の高さ方向に沿う位置に一列状に配置されている。また、棚12の配置を平面的に見た場合、3つの側面(11a、11b、11d)側の各々には、一対の棚12が並列して配置されている。なお、筐体11の側面11aにおいて、入庫用受け渡し機構13及び出庫用受け渡し機構14が配置される領域には、棚12は設けられない。
【0032】
ここで、被収容物6としては、例えば、半導体ウェーハ、液晶表示装置用ガラス基板、フォトマスク用ガラス基板、光ディスク用基板等の各種の基板が挙げられる。また、容器5としては、例えばFOUP、FOSBなどが挙げられる。容器5は、容器本体5aと、蓋5bと、フランジ部5cと、を有する。容器本体5aは、複数の被収容物6を多段状に間隔を開けて収容すると共に、一側面に対して被収容物6を出し入れするための開放部(開口)を有する。蓋5bは、容器本体5aの開放部に対して開閉自在に取り付けられ、容器5内を密閉しパーティクル(微細な塵)から被収容物6を保護する機能等を有する。フランジ部5cは、板形状を有し、容器本体5aの上面側に配置される。フランジ部5cは、搬送車22による容器5の搬送の際に、後述する搬送車22の把持部22dによって把持される部位である。
【0033】
入庫用受け渡し機構13及び出庫用受け渡し機構14は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筺体11の側面11a側に並列して設けられた2つの開口11kの各々に対応する位置に設けられる。入庫用受け渡し機構13及び出庫用受け渡し機構14は、筐体11の外部(例えば搬送車22など)及び容器移載装置15との間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構13及び出庫用受け渡し機構14は、筐体11の側面11a側において、相互に並列して配置されると共に筐体11の外部から各開口11kを通じて筐体11の内部にかけて延在し、その延在方向に容器5を搬送する。
【0034】
入庫用受け渡し機構13は、搬送車22より受け渡された容器5を、当該容器5の向きを変えることなく容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする移動機構13a(本例では搬送用のコンベア)を備える。好適な例では、入庫用受け渡し機構13と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0035】
一方、出庫用受け渡し機構14は、容器移載装置15より受け渡された容器5を、当該容器5の向きを変えることなく筐体11の外部(例えば搬送車22の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車22)に対して受け渡し可能な状態とする移動機構14a(本例では搬送用のコンベア)を備える。好適な例では、出庫用受け渡し機構14と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0036】
容器移載装置15は、筐体11内に配置され、コントローラ3による指示の下、入庫用受け渡し機構13及び出庫用受け渡し機構14と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う役割を有する。具体的に、容器移載装置15は、昇降機構15aと、アーム機構15fと、制御部15eと、を備えて構成される。
【0037】
容器移載装置15の構成要素のうち、アーム機構15fは、保管庫1内において、後述する案内部15aa及び複数の棚12に取り囲まれる位置に配置される。そして、案内部15aa及び複数の棚12の内側には、人が入り込んで作業することが可能な空間Eが形成されている。ここで、作業としては、例えば、容器移載装置15のメインテナンス作業や、容器移載装置15等の故障時などにおいて棚12に載置された容器5を筐体11の外部に取り出す作業などが含まれる。
【0038】
昇降機構15aは、第1の階層F1の床7a付近から筐体11の高さ方向に延在する案内部15aaと、案内部15aaに沿って、即ち筐体11の高さ方向及び当該高さ方向とは逆方向に向けて昇降可能な昇降体15abと、を更に備える。昇降体15abの一端は、筐体11の中心軸L1に位置している。
【0039】
アーム機構15fは、第1のアーム15bと、第2のアーム15cと、ハンド15dと、を備える。
【0040】
第1のアーム15bは、昇降体15abの一端に対して、モーターM1を介して取り付けられている。このため、第1のアーム15bは、昇降体15abの一端を基点に又は筐体11の中心軸L1回りに旋回可能に構成される。第2のアーム15cは、第1のアーム15bの一端に対して、モーターM2を介して取り付けられている。このため、第2のアーム15cは、第1のアーム15bの一端を基点にして旋回可能に構成される。ハンド15dは、容器5の移載時に当該容器5を載置した状態で保持する容器保持部としての機能を有し、第2のアーム15cの一端に対して、モーターM3を介して取り付けられている。このため、ハンド15dは、第2のアーム15cの一端を基点にして旋回可能に構成される。以上の構成を有するアーム機構15fは、縮んだ状態にてモーターM1の回転動作により昇降体15abの一端を基点に旋回しつつ、さらにモーターM1〜M3の協調動作(回転動作)により第1のアーム15b、第2のアーム15c及びハンド15dを伸縮して、指定の棚12との間で容器5の受け渡しを行う。
【0041】
なお、ハンド15dの上面には、図示を省略するが、容器5の底面に形成される嵌合部に嵌合して容器5の位置規制を行うための他の嵌合部(例えば、周知のキネマティックカップリング機構等)が形成される。
【0042】
制御部15eは、例えば案内部15aaの下方に配置される。但し、本発明では、保管庫1における制御部15eの設定位置に限定はない。制御部15eは、図示しないCPU(Central Processing Unit)や、図示しないROM(Read Only Memory)及びRAM(Random Access Memory)等に代表されるメモリなどを備え、コントローラ3による指示の下、昇降機構15a、アーム機構15f等を夫々駆動制御する。
【0043】
(搬送装置の構成)
次に、搬送装置2の構成は次の通りである。
【0044】
搬送装置2は、軌道(レール)21と、搬送車22と、を備える。
【0045】
軌道21は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筐体11の側面11aに隣接する位置に且つ当該側面11aを横断する位置に対応して設けられている。第1の階層F1に設けられた軌道21は、その天井7bに懸垂されている。第2の階層F2に設けられた軌道21は、その天井7cに懸垂されている。第3の階層F3に設けられた軌道21は、その天井7dに懸垂されている。
【0046】
搬送車22としては、例えばOHT(Over head Hoist Transport)が挙げられる。搬送車22は、例えばリニアモータなどの駆動方式により軌道21に沿って側面11aを横断する方向(図2の矢印Y1方向)に走行する。即ち、搬送車22は、入庫用受け渡し機構13及び出庫用受け渡し機構14をこの順に通過するように軌道21を走行する。また、搬送車22は、容器5を、保管庫1に向けて搬送するのに加えて、各種処理装置、各種製造装置、或いは各種検査装置等に向けて搬送する。
【0047】
具体的に、搬送車22は、容器5を収容可能な筐体22aと、懸垂ベルト22bと、懸垂ベルト22bの巻き取り又は巻き戻しを行う懸垂機構22cと、懸垂ベルト22bの一端に設けられ、懸垂機構22cにより昇降され、容器5のフランジ部5cを把持又は開放する把持部22dと、を備える。この搬送車22では、把持部22dにより容器5のフランジ部5cが把持された状態で、懸垂機構22cを通じて懸垂ベルト22bの巻き取り又は巻き戻しを行うことにより、筐体11の高さ方向及び当該高さ方向とは逆方向(図2の矢印Y4方向)に把持部22dが昇降し、これにより容器5の昇降が行われる。
【0048】
本例では、搬送車22は、コントローラ3による入庫指示に従い、入庫ポートとして機能する入庫用受け渡し機構13に対向する位置で停止して、容器5を入庫用受け渡し機構13の上に載置すると共に、コントローラ3による出庫指示に従い、出庫ポートとして機能する出庫用受け渡し機構14に対向する位置で停止して、出庫用受け渡し機構14の上に載置された出庫待ちの容器5を受け取る。
【0049】
(コントローラの構成)
次に、コントローラ3の構成は次の通りである。
【0050】
コントローラ3は、CPU(図示略)、メモリ(図示略)などを備え、半導体等の工程スケジュールに基づいて、保管庫1及び搬送車22に対する各種の制御を行う。例えば、コントローラ3は、半導体等の工程スケジュールに基づいて、保管庫1及び搬送車22に対して容器5の搬送及び入出庫などを指示したりする。
【0051】
(保管庫システムの動作)
次に、図1乃至図5を参照して、第1実施形態に係る保管庫システム100の動作の一例について説明する。
【0052】
図4(a)及び(b)は、それぞれ、図3(b)に対応する保管庫システム100の平面図であり、特に、保管庫システム100の動作例について示す。図5(a)及び(b)は、それぞれ、図4(a)及び(b)の破線領域E1に対応するアーム機構15f及び棚12を含む概略平面図であり、特に、アーム機構15f等による棚12への容器5の移載例について示す。
【0053】
まず、保管庫1への容器5の入庫動作は例えば次の通りである。
【0054】
コントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に懸垂された軌道21を矢印Y1方向に沿って走行する搬送車22、及び保管庫1内の容器移載装置15に対して、保管庫1内に対する容器5の入庫指示を出す。これに基づき、搬送車22は、筐体11の外部に位置する、指定の入庫用受け渡し機構13の上方の位置で停止して、被収容物6を収容している容器5を指定の入庫用受け渡し機構13の移動機構13a上に載置又は受け渡す。
【0055】
一方、このとき、容器移載装置15は、保管庫1内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の回転動作により保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の入庫用受け渡し機構13に向けた状態でアーム機構15fを停止させる。次に、指定の入庫用受け渡し機構13の移動機構13aは、載置された容器5を、当該容器5の向きを変えることなく、開口11kを通して保管庫1内の容器移載装置15に向けて(図3(a)の矢印Y2方向に)移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする。
【0056】
ここで、受け渡し可能な状態としては、例えば移動機構13aが容器5を容器移載装置15に近接する位置まで搬送した後に停止して、その後、容器移載装置15が移動機構13aより容器5を受け取ることが可能となるような状態や、容器移載装置15のハンド15dが移動機構13aの近傍位置に待機しておき、移動機構13aが容器5を容器移載装置15のハンド15d上に直接受け渡すことを可能とする状態などが挙げられる。
【0057】
次に、容器移載装置15は、図3(a)等に示すように、モーターM1〜M3の協調動作によりアーム機構15fを保管庫1内における指定の入庫用受け渡し機構13側(矢印Y2方向とは逆方向である矢印Y3方向)へ伸ばしつつ、容器5をハンド15d上に載せる。次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを縮めて、容器5を載置するハンド15dを保管庫1の中心軸L1側に引き込む。次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1の中心軸L1回りに旋回させて、図4(a)に示すように、ハンド15dを指定の棚12xに向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、図4(b)及び図5(b)に示すように、モーターM1〜M3の協調動作により、図5(a)の矢印に示す特定の軌跡に沿うようにアーム機構15fを指定の棚12x側へ伸ばして、ハンド15dから指定の棚12xへ容器5を移し替える。
【0058】
ここで、図5(a)の矢印に示す特定の軌跡としては、例えば、保管庫1の中心軸L1から棚12xに至る軌跡(区間k1〜k3)において、モーターM1〜M3の協調動作により、区間k1では、アーム機構5fの各要素を直線的に移動させ、また、区間k2では、アーム機構5fの各要素を曲線的に移動させ、さらに、区間k3では、アーム機構5fの各要素を直線的に移動させて、最終的にハンド15dから指定の棚12xへ容器5を移し替える形態が挙げられる。こうして、容器5が指定の棚12x上へ載置され、保管庫1内への容器5の入庫作業が完了する。
【0059】
一方、保管庫1から容器5を出庫させる出庫動作は例えば次の通りである。
【0060】
コントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車22、及び保管庫1内の容器移載装置15に対して、容器5の出庫指示を出す。これに基づき、搬送車22は、筐体11の外側に位置する、指定の出庫用受け渡し機構14の上方の位置で停止(待機)する。
【0061】
一方、このとき、容器移載装置15は、保管庫1内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の動作により保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の棚12に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、モーターM1の回転動作によりアーム機構15fをその中心軸L1回りに旋回させつつ、モーターM1〜M3の協調動作によりアーム機構15fを指定の棚12側へ伸ばして、指定の棚12からハンド15d上へ容器5を移し替える。次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを縮めて、容器5を載置するハンド15dを中心軸L1側に引き込む。
【0062】
次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の出庫用受け渡し機構14に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、縮めた状態にあるアーム機構15fを、モーターM1〜M3の協調動作により指定の出庫用受け渡し機構14側(図3(a)の矢印Y3方向)へ伸ばしつつ、ハンド15dから、保管庫1内に位置する出庫用受け渡し機構14の移動機構14a上に容器5を移載する。次に、指定の出庫用受け渡し機構14の移動機構14aは、載置された容器5を、当該容器5の向きを変えることなく開口11kを通して筐体11の外部(例えば搬送車22の存在する方向)に向けて(矢印Y3方向に)移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車22)に対して受け渡し可能な状態とする。
【0063】
ここで、受け渡し可能な状態としては、例えば移動機構14aが容器5を保管庫1の外部であって且つ待機状態にある搬送車22と平面的に重なる位置まで移動させた後に停止して、その後、搬送車22が移動機構14aより容器5を受け取ることが可能となる状態などが挙げられる。
【0064】
次に、待機状態にある搬送車22は、指定の出庫用受け渡し機構14の移動機構14a上に載置された容器5を収容する。こうして、保管庫1に対する容器5の出庫作業が完了する。次に、搬送車22は、その容器5を各種の製造装置等に向けて搬送する。
【0065】
次に、第1比較例と比較した、第1実施形態に係る保管庫システム100の作用効果の一例について説明する。
【0066】
(第1比較例に係る保管庫システムの構成)
まず、図6を参照して、第1比較例に係る保管庫システム100zの構成及びその課題について述べる。
【0067】
図6(a)は、図3(a)に対応する、第1比較例に係る保管庫システム100zの構成を示す平面図である。図6(b)は、図3(b)に対応する、保管庫システム100zの構成を示す平面図である。なお、図6(a)及び(b)では、保管庫1zと搬送装置2との平面的な位置関係についての理解を容易とするため、搬送装置2の位置を一点鎖線にて図示することにしている。
【0068】
第1実施形態に係る保管庫システム100と、第1比較例に係る保管庫システム100zとを比較した場合、その両者は、保管庫の構成が異なり、それ以外は同様である。よって、以下では、第1実施形態と同一の要素については同一の符号を付し、その説明は適宜省略する。
【0069】
第1比較例では、保管庫1zは、筺体11と、複数の棚12と、入庫用受け渡し機構(入庫用ポート)13zと、出庫用受け渡し機構(出庫用ポート)14zと、容器移載装置15zと、を備える。
【0070】
棚12は、筐体11内において、その中心軸L1を基点として放射状に且つ筐体11の高さ方向に一列状に配置される。
【0071】
入庫用受け渡し機構13z及び出庫用受け渡し機構14zは、筐体11の外部における搬送車22と容器移載装置15zとの間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構13z及び出庫用受け渡し機構14zは、筐体11の側面11a側の各開口11kにおいて、相互に並列して配置されると共に筐体11の外部から筐体11の内部にかけて延在してなる。また、入庫用受け渡し機構13zは、筐体11の外部から筐体11の内部にかけて水平一方向(矢印Y2方向)に容器5を搬送するコンベア13zaと、容器移載装置15z側に設けられ、水平面上を旋回する旋回ステージ13zbと、を備える。一方、出庫用受け渡し機構14zは、筐体11の内部から筐体11の外部にかけて水平一方向(矢印Y3方向)に容器5を搬送するコンベア14zaと、容器移載装置15z側に設けられ、水平面上を旋回する旋回ステージ14zbと、を備える。
【0072】
容器移載装置15zは、筐体11内に配置され、図示しないコントローラ3による指示の下、入庫用受け渡し機構13zの旋回ステージ13zb及び出庫用受け渡し機構14zの旋回ステージ14zbと、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う役割を有する。
【0073】
具体的に、容器移載装置15zは、案内部15aa及び昇降体15abを有する昇降機構15aと、アーム機構15gと、制御部15eと、を備えて構成される。案内部15aaは、筐体11の隅の位置に配置されている。昇降体15abの一端は筐体11の中心軸L1に位置していると共に、昇降体15abの他端は案内部15aaに昇降可能に支持されている。
【0074】
アーム機構15gは、上記した第1のアーム15bより長さの短い第1のアーム15bxと、上記した第2のアーム15cより長さの短い第2のアーム15cxと、上記したハンド15dより長さの短いハンド15dxと、を備え、保管庫1z内において、案内部15aa及び複数の棚12に取り囲まれる位置に配置される。そして、案内部15aa及び複数の棚12の内側には円形状の平面形状を有する空間Ezaが形成されている。一方、各棚12と筐体11の4つの側面(11a、11b、11c、11d)との間には、筐体11の外部より人が入り込むことが可能な空間Ezbが形成されている。
【0075】
第1のアーム15bxは、昇降体15abの一端に対して、モーターM1を介して取り付けられている。このため、第1のアーム15bは、昇降体15abの一端を基点に又は筐体11の中心軸L1回りに旋回可能に構成される。第2のアーム15cxは、第1のアーム15bの一端に対して、モーターM2を介して取り付けられている。このため、第2のアーム15cは、第1のアーム15bの一端を基点にして旋回可能に構成される。ハンド15dxは、ハンド15dと同様の機能を有し、第2のアーム15cの一端に対して取り付けられている。以上の構成を有するアーム機構15gは、モーターM1の回転動作により昇降体15abの一端を基点に旋回しつつ、モーターM1及びM2の協調動作(回転駆動)により第1のアーム15bx、第2のアーム15cx及びハンド15dxを伸縮して、指定の棚12との間で容器5の受け渡しを行う。
【0076】
(第1比較例に係る保管庫システムの動作)
次に、図6及び図7を参照して、第1比較例に係る保管庫システム100zの動作について説明する。図7(a)及び(b)は、それぞれ、図6(b)に対応する保管庫システム100zの平面図であり、特に、保管庫システム100zの動作例について示す。
【0077】
まず、保管庫1zへの容器5の入庫動作は次の通りである。
【0078】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に懸垂された軌道21を矢印Y1方向に沿って走行する搬送車22、及び保管庫1z内の容器移載装置15zに対して、保管庫1z内に対する容器5の入庫指示を出す。これに基づき、搬送車22は、筐体11の外部に位置する、指定の入庫用受け渡し機構13zのコンベア13zaの上方位置で停止して、容器5を指定の入庫用受け渡し機構13zのコンベア13za上に載置する。
【0079】
一方、このとき、容器移載装置15zは、保管庫1z内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15gをモーターM1の回転動作により保管庫1zの中心軸L1回りに旋回させて、ハンド15dxを指定の入庫用受け渡し機構13zに向けた状態でアーム機構15gを停止させる。次に、指定の入庫用受け渡し機構13zのコンベア13zaは、載置された容器5を、図6(a)の矢印Y2方向に示すように保管庫1z内の容器移載装置15zに向けて水平一方向に搬送し、旋回ステージ13zb上に移す。次に、旋回ステージ13zbは、その上に載置された容器5の蓋5bがハンド15dx側に向くように所定の角度だけ旋回する。
【0080】
次に、容器移載装置15zは、図6(a)においてモーターM2の回転動作によりアーム機構15gを旋回ステージ13zb側へ伸ばして、旋回ステージ13zb上に載置された容器5をハンド15dx上に移し替える。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。次に、容器移載装置15zは、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zの中心軸L1回りに旋回させて、図7(a)に示すようにハンド15dxを指定の棚12xに向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、図7(b)に示すように、モーターM2の回転動作によりアーム機構15gを指定の棚12x側へ伸ばして、ハンド15dxから指定の棚12xへ容器5を移し替える。こうして、保管庫1z内への容器5の入庫作業が完了する。
【0081】
一方、保管庫1zから容器5を出庫させる出庫動作は次の通りである。
【0082】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車22、及び保管庫1z内の容器移載装置15zに対して、容器5の出庫指示を出す。これに基づき、搬送車22は、筐体11の外側に位置する、指定の出庫用受け渡し機構14zのコンベア14zaの上方位置で停止(待機)する。
【0083】
一方、このとき、容器移載装置15zは、保管庫1z内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zの中心軸L1回りに旋回させて、ハンド15dxを指定の棚12xに向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、モーターM1の回転動作によりアーム機構15gをその中心軸L1回りに旋回させつつ、モーターM2の回転動作によりアーム機構15gを指定の棚12x側へ伸ばして、指定の棚12xからハンド15dx上への容器5の移し替えを行う。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。
【0084】
次に、容器移載装置15zは、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zの中心軸L1回りに旋回させて、ハンド15dxを指定の出庫用受け渡し機構14zの旋回ステージ14zbに向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、縮めた状態にあるアーム機構15gを、モーターM2の回転動作により指定の出庫用受け渡し機構14の旋回ステージ14zb側へ伸ばしつつ、ハンド15dxから、旋回ステージ14zb上に容器5を移載する。次に、旋回ステージ14zbは、その上に載置された容器5の蓋5bが筐体11の側面11cと対面するように所定の角度だけ旋回する。次に、指定の出庫用受け渡し機構14zのコンベア14zaは、旋回ステージ14zbの上に載置された容器5を保管庫1zの外部に向けて水平一方向に搬送する。次に、指定の出庫用受け渡し機構14zのコンベア14zaは、容器5を、保管庫1zの外部であって且つ待機状態にある搬送車22と平面的に重なる位置まで移動させた後に停止する。
【0085】
次に、その停止位置で待機状態にある搬送車22は、指定の出庫用受け渡し機構14のコンベア14za上に載置された容器5を収容する。こうして、保管庫1zに対する容器5の出庫作業が完了する。
【0086】
以上に述べた第1比較例では、入庫用受け渡し機構(入庫用ポート)13zは、コンベア13zaに加えて、旋回ステージ13zbを有している。また、出庫用受け渡し機構(出庫用ポート)14zは、コンベア14zaに加えて、旋回ステージ14zbを有している。よって、第1比較例では、入出庫用ポートに対して、旋回ステージ13zb、14zbを設けている分だけ、保管庫1zのコストが増加してしまうといった課題がある。
【0087】
これに対し、第1実施形態では、入庫用受け渡し機構(入庫用ポート)13は、搬送車22より受け渡された容器5を、当該容器5の向きを変えることなく容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする移動機構13a(本例では搬送用のコンベア)を備える。好適な例では、入庫用受け渡し機構13と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0088】
また、第1実施形態では、出庫用受け渡し機構(出庫用ポート)14は、容器移載装置15より受け渡された容器5を、当該容器5の向きを変えることなく筐体11の外部(例えば搬送車22の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車22)に対して受け渡し可能な状態とする移動機構14a(本例では搬送用のコンベア)を備える。好適な例では、出庫用受け渡し機構14と、筐体11の外部(本例では搬送車22)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0089】
これらの構成によれば、入庫用ポートに対して、第1比較例のような容器5の方向転換を行うための旋回ステージ13zb、14zbを必要としない。よって、第1実施形態によれば、そのような旋回ステージ13zb、14zbを設けない分だけ、第1比較例と比べ保管庫1のコストを削減することができる。つまり、第1実施形態では、第1比較例と比べて、入出庫ポート(入庫用受け渡し機構13z及び出庫用受け渡し機構14)における駆動機構の数の削減により保管庫1のコストを削減することができる。また、駆動機構の数を削減することができるので、入出庫ポートの故障等に対する信頼性を向上させることができ、ひいては保管庫1の故障等に対する信頼性を向上させることができる。
【0090】
また、第1比較例では、図6(b)等に示すように、棚12は、筐体11内において、その中心軸L1を基点として放射状に且つ筐体11の高さ方向に一列状に配置される。このため、複数の棚12及び案内部15aaの内側に形成される空間Ezaは非常に小さくなっている。そのため、第1比較例では、人が筐体11の外部からその空間Eza内に入って、容器移載装置15zのメインテナンス作業を実施したり、容器移載装置15zの故障時において容器5を保管庫1zの外部へ取り出す作業等を実施したりすることは困難であるといった課題がある。
【0091】
これに対して、第1実施形態では、図3(b)等に示すように、棚12は、筐体11の4つの側面(11a、11b、11c、11d)のうち3つの側面(11a、11b、11d)側の各々において、その3つの側面(11a、11b、11d)の各々の高さ方向に沿う位置に一列状に配置されている。また、棚12の配置を平面的に見た場合、3つの側面(11a、11b、11d)側の各々には、一対の棚12が並列して配置されている。ここで、第1実施形態において筐体11の大きさは、第1比較例と同様である。
【0092】
これにより、複数の棚12及び案内部15aaの内側に形成される空間Eは、第1比較例に係る空間Ezaと比べて大きくなる。そのため、人が筐体11の外部からその空間E内に入って、容器移載装置15のメインテナンス作業を実施したり、容器移載装置15の故障時において容器5を保管庫1の外部へ取り出す作業等を実施したりすることを容易に行うことができる。その結果、第1比較例のように各棚12と筐体11の4つの側面(11a、11b、11c、11d)との間に対して、そのような各種作業を実施するための空間Ezbを設ける必要がなくなる。
【0093】
なお、第1実施形態では、このように空間Eが大きくなるのに伴って、アーム機構15fの各要素の長さが、対応するアーム機構15gの各要素の長さと比較して大きくなっている。
【0094】
[第2実施形態]
(保管庫システムの構成)
次に、図8及び図9を参照して、本発明の第2実施形態に係る保管庫システム100aの構成について説明する。なお、以下では、第1実施形態と同一の要素については同一の符号を付し、その説明は適宜省略する。
【0095】
図8は、図2に対応する、第2実施形態に係る保管庫システム100aの高さ方向に沿った一断面図であると共に、入庫用受け渡し機構70を通る位置で切断した一断面図を示す。図9は、図8の切断線C−C’に沿った保管庫システム100aの平面図であり、特に、保管庫1aの構成要素である、容器移載装置15と複数の受け渡し機構70、80と複数の棚12との相対的な位置関係を示す。なお、図8の切断線D−D’に沿った保管庫システム100aにかかる、複数の棚12、容器移載装置15及び複数の受け渡し機構70、80の平面的な位置関係は、図2の切断線B−B’に沿った保管庫システム100にかかる、複数の棚12、容器移載装置15及び複数の受け渡し機構13、14の平面的な位置関係と同様であり、その図示は省略する。
【0096】
第2実施形態に係る保管庫システム100aは、第1実施形態に係る保管庫システム100と比較して、搬送装置の構成、並びに保管庫における入庫用受け渡し機構及び出庫用受け渡し機構の各構成が異なり、それ以外は同様である。
【0097】
(搬送装置の構成)
まず、第2実施形態に係る搬送装置30の構成は次の通りである。
【0098】
搬送装置30は、軌道(レール)31と、軌道31を支持する支持部32と、搬送車33と、を備える。
【0099】
軌道31は、第1の階層F1、第2の階層F2及び第3の階層F3の各々において、筐体11の側面11aに隣接する位置に且つ当該側面11aを横断する位置に対応して設けられている。第1の階層F1に設けられた軌道31は、対応する支持部32を通じて天井7bに懸垂されている。第2の階層F2に設けられた軌道31は、対応する支持部32を通じて天井7cに懸垂されている。第3の階層F3に設けられた軌道31は、対応する支持部32を通じて天井7dに懸垂されている。また、第1の階層F1、第2の階層F2及び第3の階層F3の各々における各支持部32は、各開口11k側の側面に対応する位置に開口32kを有する。この各開口32kは、搬送車33と入庫用受け渡し機構70及び出庫用受け渡し機構80との間で容器5の受け渡しを行うための開口として機能する。
【0100】
搬送車33としては、例えばOHS(Over Head Shuttle)が挙げられる。搬送車33は、例えばリニアモータなどの駆動方式により軌道31に沿って側面11aを横断する方向(図9の矢印Y1方向)に走行する。即ち、搬送車33は、軌道31上を、入庫用受け渡し機構70及び出庫用受け渡し機構80をこの順に通過するように走行する。また、搬送車33は、容器5を、保管庫1aに向けて搬送するのに加えて、各種処理装置、各種製造装置、或いは各種検査装置等に向けて搬送する。本例では、搬送車33は、図示しないコントローラ3による入庫指示に従い、入庫ポートとして機能する入庫用受け渡し機構70に隣接する位置で停止(待機)すると共に、コントローラ3による出庫指示に従い、出庫ポートとして機能する出庫用受け渡し機構80に隣接する位置で停止(待機)する。
【0101】
(保管庫の構成)
次に、第2実施形態に係る保管庫1aの構成は次の通りである。
【0102】
保管庫1aは、上記した保管庫1と同様に、第1の階層F1における床7aの上に設置され、第1の階層F1から第3の階層F3にかけて聳え立つように設けられる。なお、本発明では、保管庫1aは1つの階層のみに設けられていても構わないし、或いは、3つ以上の階層を跨るように設けられていても構わない。
【0103】
具体的に、保管庫1aは、筺体11と、複数の棚12と、入庫用受け渡し機構(第1の受け渡し機構又は入庫用ポート)70と、出庫用受け渡し機構(第2の受け渡し機構又は出庫用ポート)80と、容器移載装置15と、を備える。
【0104】
入庫用受け渡し機構70及び出庫用受け渡し機構80は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筺体11の側面11a側に並列して設けられた各開口11kに対応する位置に設けられる。入庫用受け渡し機構70及び出庫用受け渡し機構80は、筐体11の外部、例えば搬送車33及び容器移載装置15との間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構70及び出庫用受け渡し機構80は、筐体11の側面11a側において、相互に並列して配置される。
【0105】
入庫用受け渡し機構70は、入庫用ステージ71と、容器移載装置72と、を有する。入庫用ステージ71は、容器移載装置72を支持すると共に容器移載装置72と容器移載装置15との間で入庫作業を行う際に用いられる台座として機能する。入庫用ステージ71は、筐体11の外部から開口11kを通して筐体11の内部にかけて延在して構成される。
【0106】
容器移載装置72は、コントローラ3による指示の下、搬送車33と容器移載装置15との間で容器5の入庫に伴う移載又は搬送を行う役割を有する。なお、容器移載装置72は、アーム機構15fと同様の構成を有する。即ち、容器移載装置72は、第1のアーム72bと、第2のアーム72cと、ハンド72dと、それらの各要素を回転自在に支持するモーターM1〜M3と、を備える。好適な例では、入庫用受け渡し機構70の容器移載装置72と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0107】
一方、出庫用受け渡し機構80は、出庫用ステージ81と、容器移載装置82と、を有する。出庫用ステージ81は、容器移載装置82を支持すると共に容器移載装置82と容器移載装置15との間で出庫作業を行う際に用いられる台座として機能する。出庫用ステージ81は、筐体11の外部から開口11kを通して筐体11の内部にかけて延在して構成される。
【0108】
容器移載装置82は、コントローラ3による指示の下、搬送車33と容器移載装置15との間で容器5の出庫に伴う移載又は搬送を行う役割を有する。なお、容器移載装置82は、アーム機構15fと同様の構成を有する。即ち、容器移載装置82は、第1のアーム82bと、第2のアーム82cと、ハンド82dと、それらの各要素を回転自在に支持するモーターM1〜M3と、を備える。好適な例では、出庫用受け渡し機構80の容器移載装置82と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0109】
(保管庫システムの動作)
次に、図8乃至図9を参照して、第2実施形態に係る保管庫システム100aの動作の一例について説明する。
【0110】
まず、保管庫1aへの容器5の入庫動作は例えば次の通りである。
【0111】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に支持部32を通じて懸垂された軌道31を矢印Y1方向に沿って走行する搬送車33、並びに保管庫1a内の容器移載装置72及び容器移載装置15に対して、保管庫1a内に対する容器5の入庫指示を出す。これに基づき、搬送車33は、筐体11の外部に位置する、指定の入庫用受け渡し機構70に隣接する位置で停止(待機)する。
【0112】
一方、このとき、容器移載装置15は、保管庫1a内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の回転動作により保管庫1aの中心軸L1回りに旋回させて、ハンド15dを指定の入庫用受け渡し機構70に向けた状態でアーム機構15fを停止させる。次に、容器移載装置72は、ハンド72d等を保管庫1aの外部に位置する、搬送車33側(矢印Y2方向とは逆方向である矢印Y3方向)へ開口11k及び32kを通して伸ばしつつ、容器5をハンド72d上に載せる。次に、容器移載装置72は、ハンド72d上に載置された容器5を、矢印Y2方向に示すように当該容器5の向きを変えることなく、保管庫1a内の容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする。
【0113】
ここで、受け渡し可能な状態としては、例えば容器移載装置72が容器5を容器移載装置15に近接する入庫用ステージ71上の位置に載置して、その後、容器移載装置15がその容器5を受け取ることが可能となる状態や、容器移載装置72が容器5を入庫用ステージ71上に載置することなく、容器移載装置15のハンド15d上に直接受け渡す状態などが挙げられる。
【0114】
次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを保管庫1a内における指定の入庫用受け渡し機構70の入庫用ステージ71側(矢印Y2方向とは逆方向である矢印Y3方向)へ伸ばしつつ、容器5をハンド15d上に載せる。次に、容器移載装置15は、モーターM1〜M3の協調動作により容器5を載置するハンド15dを保管庫1aの中心軸L1側に引き込む。次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1aの中心軸L1回りに旋回させて、ハンド15dを指定の棚12に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、モーターM1〜M3の協調動作により、上記した特定の軌跡に沿うようにアーム機構15fを指定の棚12側へ伸ばして、ハンド15dから指定の棚12へ容器5を移し替える。こうして、容器5が指定の棚12上へ載置され、保管庫1a内への容器5の入庫作業が完了する。
【0115】
一方、保管庫1aから容器5を出庫させる出庫動作は例えば次の通りである。
【0116】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車33、並びに保管庫1a内の容器移載装置82及び容器移載装置15に対して、容器5の出庫指示を出す。これに基づき、搬送車33は、筐体11の外側に位置する、指定の出庫用受け渡し機構80に隣接する位置で停止(待機)する。
【0117】
一方、このとき、容器移載装置15は、保管庫1a内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15fをモーターM1の動作により保管庫1aの中心軸L1回りに旋回させて、ハンド15dを指定の棚12に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、モーターM1の回転動作によりアーム機構15fをその中心軸L1回りに旋回させつつ、モーターM1〜M3の協調動作により、アーム機構15fを指定の棚12側へ伸ばして、指定の棚12からハンド15d上へ容器5を移し替える。次に、容器移載装置15は、モーターM1〜M3の協調動作によりアーム機構15fを縮めて、容器5を載置するハンド15dを中心軸L1側に引き込む。
【0118】
次に、容器移載装置15は、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15fを保管庫1の中心軸L1回りに旋回させて、ハンド15dを指定の出庫用受け渡し機構80に向けた状態でアーム機構15fを停止させる。次に、容器移載装置15は、縮めた状態にあるアーム機構15fを、モーターM1〜M3の協調動作により指定の出庫用受け渡し機構80の出庫用ステージ81側(矢印Y3方向)へ伸ばしつつ、ハンド15dから、保管庫1a内に位置する出庫用ステージ81上に容器5を載せる。次に、容器移載装置82は、ハンド82d等を出庫用ステージ81側(矢印Y2方向)へ伸ばしつつ、ハンド82d上に容器5を載せる。
【0119】
次に、容器移載装置82は、ハンド82d上に載置された容器5を、矢印Y3方向に示すように当該容器5の向きを変えることなく、開口11k及び32kを通して筐体11の外部(例えば搬送車33の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車33)に対して受け渡し可能な状態とする。
【0120】
ここで、受け渡し可能な状態としては、例えば容器移載装置82が容器移載装置15より受け渡された容器5を搬送車33上に載置して搬送車33に当該容器5を直接受け渡すことなどが挙げられる。こうして、保管庫1aに対する容器5の出庫作業が完了する。次に、搬送車33は、その容器5を各種の製造装置等に向けて搬送する。
【0121】
次に、第2比較例と比較した、第2実施形態に係る保管庫システム100aの作用効果の一例について説明する。
【0122】
(第2比較例に係る保管庫システムの構成)
まず、図10を参照して、第1比較例と比較した、第2比較例に係る保管庫システム100zaの構成及びその課題について述べる。
【0123】
図10(a)は、図6(a)に対応する、第2比較例に係る保管庫システム100zaの構成を示す平面図である。
【0124】
第2比較例に係る保管庫システム100zaと、上記した第1比較例に係る保管庫システム100zとを比較した場合、その両者は、主に、保管庫の構成のうち、入庫用受け渡し機構及び出庫用受け渡し機構の構成が異なり、それ以外は同様である。よって、以下では、第1比較例と同一の要素については同一の符号を付し、その説明は適宜省略する。
【0125】
第2比較例に係る保管庫1zaにおいて、入庫用受け渡し機構70z及び出庫用受け渡し機構80zは、筐体11の外部における搬送車33と容器移載装置15zとの間で容器5の受け渡しを行う役割を有する。具体的に、入庫用受け渡し機構70z及び出庫用受け渡し機構80zは、筐体11の側面11a側の各開口11kに対応する位置において、相互に並列して配置される。
【0126】
入庫用受け渡し機構70zは、旋回ステージ71と、容器移載装置72と、を有する。 旋回ステージ71は、筐体11内における容器移載装置15z側に設けられ、水平面において旋回可能に構成される。旋回ステージ71は、後述する容器移載装置72を通じて容器5が受け渡された場合に、その容器5の蓋5bがハンド15dx側に向くように所定の角度だけ旋回する。容器移載装置72は、入庫用受け渡し機構70zにおいて筐体11の側面11a側に配置される。
【0127】
一方、出庫用受け渡し機構80zは、入庫用受け渡し機構70zと同様の構成であり、旋回ステージ81と、容器移載装置82と、を有する。旋回ステージ81は、出庫用受け渡し機構80zにおいて筐体11内における容器移載装置15z側に設けられ、水平面において旋回可能に構成される。旋回ステージ81は、容器移載装置15zを通じて容器5が受け渡された場合に、その容器5の蓋5bが筐体11の側面11cと対面するように所定の角度だけ旋回する。容器移載装置82は、出庫用受け渡し機構80zにおいて筐体11の側面11a側に配置される。
【0128】
(第2比較例に係る保管庫システムの動作)
次に、図10等を参照して、第2比較例に係る保管庫システム100zaの動作について説明する。
【0129】
まず、保管庫1zaへの容器5の入庫動作は次の通りである。
【0130】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れかの階層の天井に支持部32を通じて懸垂された軌道31上を矢印Y1方向に沿って走行する搬送車33、並びに保管庫1za内の容器移載装置72及び容器移載装置15zに対して、保管庫1za内に対する容器5の入庫指示を出す。これに基づき、搬送車33は、筐体11の外部に位置する、指定の入庫用受け渡し機構70zに隣接する位置で停止(待機)する。
【0131】
一方、このとき、容器移載装置15zは、保管庫1za内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらに縮めた状態にあるアーム機構15gをモーターM1の回転動作により保管庫1zaの中心軸L1回りに旋回させて、ハンド15dxを指定の入庫用受け渡し機構70zに向けた状態でアーム機構15gを停止させる。次に、容器移載装置72は、ハンド72d等を開口11k及び32kを通して保管庫1zaの外部に位置する、搬送車33側(矢印Y2方向とは逆方向である矢印Y3方向)へ伸ばしつつ、容器5をハンド72d上に載せる。次に、容器移載装置72は、ハンド72d上に載置された容器5を、開口11k及び32kを通して保管庫1za内の容器移載装置15zに向けて移動又は搬送して、旋回ステージ71上に載置する。次に、旋回ステージ71は、容器5の蓋5bがハンド15dx側に向くようにその中心軸L回りに旋回する。
【0132】
次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを旋回ステージ71側へ伸ばして、旋回ステージ71上に載置された容器5をハンド15dx上に載置する。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。次に、容器移載装置15zは、上記した第1比較例と同様の方法により指定の棚12へ容器5を載置する。こうして、保管庫1za内への容器5の入庫作業が完了する。
【0133】
一方、保管庫1zaから容器5を出庫させる出庫動作は次の通りである。
【0134】
図示しないコントローラ3は、第1の階層F1、第2の階層F2及び第3の階層F3の何れか階層における搬送車33、並びに保管庫1za内の容器移載装置82及び容器移載装置15zに対して、容器5の出庫指示を出す。これに基づき、搬送車33は、筐体11の外側に位置する、指定の出庫用受け渡し機構80zに隣接する位置で停止(待機)する。
【0135】
一方、このとき、容器移載装置15zは、保管庫1za内の適当な位置において待機状態等にある昇降体15abを、案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zaの中心軸L1回りに旋回させて、ハンド15dxを指定の棚12に向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、モーターM1の回転動作によりアーム機構15gをその中心軸L1回りに旋回させつつ、モーターM2の回転動作によりアーム機構15gを指定の棚12側へ伸ばして、指定の棚12からハンド15dx上へ容器5を移し替える。次に、容器移載装置15zは、モーターM2の回転動作によりアーム機構15gを縮めて、容器5を載置するハンド15dxを中心軸L1側に引き込む。
【0136】
次に、容器移載装置15zは、昇降体15abを案内部15aaに沿って昇降させつつ、さらにモーターM1の回転動作によりアーム機構15gを保管庫1zaの中心軸L1回りに旋回させて、ハンド15dxを指定の出庫用受け渡し機構14zの旋回ステージ81に向けた状態でアーム機構15gを停止させる。次に、容器移載装置15zは、縮めた状態にあるアーム機構15gを、モーターM2の回転動作により指定の出庫用受け渡し機構80zの旋回ステージ81側へ伸ばしつつ、ハンド15dxから、保管庫1za内に位置する旋回ステージ81上に容器5を移載する。次に、旋回ステージ81は、容器5の蓋5bが筐体11の側面11cと対面するように所定の角度だけ旋回する。次に、容器移載装置82は、ハンド82d等を旋回ステージ81側へ伸ばしつつ、ハンド82d上に容器5を載せる。
【0137】
次に、容器移載装置82は、ハンド82c上に載置された容器5を、開口11k及び32kを通して筐体11の外部(例えば搬送車33の存在する方向)に向けて移動又は搬送して、容器5を搬送車33上に載置する。こうして、保管庫1zaに対する容器5の出庫作業が完了する。次に、搬送車33は、その容器5を各種の製造装置等に向けて搬送する。
【0138】
以上に述べた第2比較例では、入庫用受け渡し機構(入庫用ポート)70zは、容器移載装置72に加えて、旋回ステージ71を有している。また、出庫用受け渡し機構(出庫用ポート)80zは、容器移載装置82に加えて、旋回ステージ81を有している。よって、第2比較例では、入出庫用ポートに対して、旋回ステージ71、81を設けている分だけ、保管庫1zaのコストが増加してしまうといった課題がある。
【0139】
これに対し、第2実施形態では、入庫用受け渡し機構(入庫用ポート)70は、搬送車33から受け取った容器5を、当該容器5の向きを変えることなく容器移載装置15に向けて移動又は搬送して、当該容器5を容器移載装置15に受け渡し可能な状態とする移動機構(本例では容器移載装置72)を備える。好適な例では、入庫用受け渡し機構70と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0140】
また、第2実施形態では、出庫用受け渡し機構(出庫用ポート)80は、容器移載装置15より受け渡された容器5を、当該容器5の向きを変えることなく筐体11の外部(例えば搬送車33の存在する方向)に向けて移動又は搬送して、当該容器5を筐体11の外部(例えば搬送車33)に対して受け渡し可能な状態とする移動機構(本例では容器移載装置82)を備える。好適な例では、出庫用受け渡し機構80と、筐体11の外部(本例では搬送車33)及び容器移載装置15との間では、容器5の蓋5bが筐体11の内側に向けられた状態で当該容器5の受け渡しが行われる。
【0141】
これらの構成によれば、入出庫用ポートに対して、第2比較例のような容器5の方向転換を行うための旋回ステージ71、81を必要としない。よって、第2実施形態によれば、そのような旋回ステージ71、81を設けない分だけ、第2比較例と比べ保管庫1aのコストを削減することができる。つまり、第2実施形態では、第2比較例と比べて、入出庫ポート(入庫用受け渡し機構70及び出庫用受け渡し機構80)における駆動機構の数の削減により保管庫1aのコストを削減することができる。また、駆動機構の数を削減することができるので、入出庫ポートの故障等に対する信頼性を向上させることができ、ひいては保管庫1aの故障等に対する信頼性を向上させることができる。
【0142】
また、第2比較例では、棚12は、第1比較例と同様に、筐体11内において、その中心軸L1を基点として放射状に且つ筐体11の高さ方向に一列状に配置される。このため、複数の棚12及び案内部15aaの内側に形成される空間Ezaは非常に小さくなっている。そのため、第2比較例では、第1比較例と同様に、人が筐体11の外部からその空間Eza内に入って、容器移載装置15zのメインテナンス作業等を実施したりすることは困難であるといった課題がある。
【0143】
これに対して、第2実施形態では、第1実施形態と同様に、棚12は、筐体11の4つの側面(11a、11b、11c、11d)のうち3つの側面(11a、11b、11d)側の各々において、その3つの側面(11a、11b、11d)の各々の高さ方向に沿う位置に一列状に配置されている。また、棚12の配置を平面的に見た場合、3つの側面(11a、11b、11d)側の各々には、一対の棚12が並列して配置される。ここで、第2実施形態において筐体11の大きさは、第2比較例と同様である。
【0144】
これにより、複数の棚12及び案内部15aaの内側に形成される空間Eは、第2比較例に係る空間Ezaと比べて大きくなる。そのため、人が筐体11の外部からその空間E内に入って、容器移載装置15のメインテナンス作業を実施したり、容器移載装置15の故障時において容器5を保管庫1aの外部へ取り出す作業等を実施したりすることを容易に行うことができる。その結果、第2比較例のように各棚12と筐体11の4つの側面(11a、11b、11c、11d)との間に対して、そのような各種作業を実施するための空間Ezbを設ける必要がなくなる。
【0145】
なお、第2実施形態では、このように空間Eが大きくなるのに伴って、アーム機構15fの各要素の長さが、対応するアーム機構15gの各要素の長さと比較して大きくなっている。
[変形例]
なお、本発明では、その趣旨を逸脱しない範囲で、種々の変形をすることが可能である。
【0146】
例えば、本発明では、第1実施形態に係る保管庫1に対して、第2実施形態に係る搬送装置30を適用してもよく、或いは、第1実施形態に係る搬送装置2及び第2実施形態に係る搬送装置30の両方を混在させてもよい。また、本発明では、第2実施形態に係る保管庫1aに対して、第1実施形態に係る搬送装置2を適用してもよく、或いは、第1実施形態に係る搬送装置2及び第2実施形態に係る搬送装置30の両方を混在させてもよい。
【0147】
また、上記の第1実施形態では、搬送装置2は保管庫1の外部において保管庫1に隣接する位置に設けられていた。また、上記の第2実施形態では、搬送装置30は保管庫1aの外部において保管庫1aに隣接する位置に設けられていた。これに限らず、本発明では、搬送装置の一部を保管庫の内部に設けるようにしてもよい。
【0148】
かかる構成を、第1実施形態に係る保管庫システム100に適用した例について図11(a)を参照して説明する。図11(a)は、図2の第1の階層F1に対応する、変形例に係る保管庫システム100bの断面図を示す。
【0149】
変形例に係る保管庫システム100bと、第1実施形態に係る保管庫システム100とを比較した場合、変形例に係る保管庫システム100bでは、主に、搬送装置2の一部を保管庫1の内部に設けるようにしている点、保管庫1に対し入庫用受け渡し機構(入庫ポート)13及び出庫用受け渡し機構(出庫ポート)14を設けていない点等が第1実施形態と異なり、それ以外は第1実施形態と同様である。よって、以下では、第1実施形態と同一の要素については同一の符号を付し、その説明は省略する。
【0150】
保管庫システム100bでは、一部図示を省略しているが、第1の階層F1、第2の階層F2及び第3の階層F3の各階層における保管庫1の筐体11に対して、軌道21に沿って搬送車22を通過させるための複数の開口(11ba、11da)が設けられる。具体的には、開口11baは、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、筐体11の側面11bに設けられていると共に、開口11daは、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、側面11bと対面する側面11dに設けられている。また、保管庫システム100bにおいて、搬送装置22の軌道21の一部は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、保管庫1内に位置する天井等に懸垂され、開口11baと開口11daとを貫くように配置されている。これにより、軌道21を沿って走行する搬送車22は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、開口11ba及び開口11daを通じて保管庫1の内部を通過することが可能になっている。
【0151】
以上の構成を有する保管庫システム100bでは、容器移載装置15は、保管庫1への容器5の入出庫の際に、複数の開口(11ba、11da)を通じて保管庫1内に進入した搬送車22との間において、容器5の向きを変えることなく当該容器5の移載を直接的に行う。
【0152】
具体的には、保管庫1に対し容器5を入庫する際には、開口11daを通じて保管庫1内に進入した搬送車22は、保管庫1内で停止(待機)する。次に、容器移載装置15は、進入した搬送車22から入庫用の容器5を当該容器5の向きを変えることなく直接受け取る。次に、容器移載装置15は、その受け取った容器5を指定の棚12に載置する。こうして、保管庫1に対する容器5の入庫作業が完了する。
【0153】
一方、保管庫1から容器5を出庫する際には、開口11daを通じて保管庫1内に進入した搬送車22は、保管庫1内で停止(待機)する。次に、容器移載装置15は、指定の棚12から取り出した出庫用の容器5を当該容器5の向きを変えることなく搬送車22に直接受け渡す。こうして、保管庫1に対する容器5の出庫作業が完了する。なお、その受け渡された容器5を搬送する搬送車33は、開口11baを通過して保管庫1の外部に移動し、当該容器5を各種の製造装置等に向けて搬送する。
【0154】
これによれば、保管庫1に対して、入庫用受け渡し機構(入庫ポート)13及び出庫用受け渡し機構(出庫ポート)14を設ける必要がないので、その分、保管庫1のコストをより削減することができると共に、保管庫1の故障等に対する信頼性の向上に寄与し得る。
【0155】
次に、搬送装置の一部を保管庫の内部に設けた構成を、第2実施形態に係る保管庫システム100aに適用した例について図11(b)を参照して説明する。図11(b)は、図8の第1の階層F1に対応する、変形例に係る保管庫システム100cの断面図を示す。
【0156】
変形例に係る保管庫システム100cと、第2実施形態に係る保管庫システム100aとを比較した場合、変形例に係る保管庫システム100cでは、主に、搬送装置30の一部を保管庫1aの内部に設けるようにしている点、保管庫1aに対し入庫用受け渡し機構70及び出庫用受け渡し機構80を設けていない点等が第2実施形態と異なり、それ以外は第2実施形態と同様である。よって、以下では、第2実施形態と同一の要素については同一の符号を付し、その説明は省略する。
【0157】
保管庫システム100cでは、一部図示を省略しているが、第1の階層F1、第2の階層F2及び第3の階層F3の各階層における保管庫1aの筐体11に対して、搬送装置30の一部を保管庫1a内に配置するための複数の開口(11ba、11da)が設けられる。保管庫1aに対する複数の開口(11ba、11da)の設定位置は、保管庫システム100bと同様である。これにより、軌道31上を走行する搬送車33は、第1の階層F1、第2の階層F2及び第3の階層F3の各階層において、開口11ba及び開口11daを通じて保管庫1aの内部を通過することが可能になっている。
【0158】
以上の構成を有する保管庫システム100cでは、容器移載装置15は、保管庫1aへの容器5の入出庫の際に、複数の開口(11ba、11da)及び開口32kを通じて保管庫1a内に進入した搬送車33との間において、容器5の向きを変えることなく当該容器5の移載を直接的に行う。
【0159】
具体的には、保管庫1aに対し容器5を入庫する際には、開口11daを通じて保管庫1a内に進入した搬送車33は、搬送装置30の開口32kに対応する位置で停止(待機)する。次に、容器移載装置15は、進入した搬送車33から入庫用の容器5を、当該容器5の向きを変えることなく開口32kを通して直接受け取る。次に、容器移載装置15は、その受け取った容器5を指定の棚12に載置する。こうして、保管庫1aに対する容器5の入庫作業が完了する。
【0160】
一方、保管庫1aから容器5を出庫する際には、開口11daを通じて保管庫1a内に進入した搬送車33は、開口32kに対応する位置で停止(待機)する。次に、容器移載装置15は、指定の棚12から取り出した出庫用の容器5を、当該容器5の向きを変えることなく開口32kを通して搬送車33に直接受け渡す。こうして、保管庫1aに対する容器5の出庫作業が完了する。なお、その受け渡された容器5を搬送する搬送車33は、開口11baを通過して保管庫1aの外部に移動し、当該容器5を各種の製造装置等に向けて搬送する。
【0161】
これによれば、保管庫1aに対して、入庫用受け渡し機構(入庫ポート)70及び出庫用受け渡し機構(出庫ポート)80を夫々設ける必要がないので、その分、保管庫1aのコストをより削減することができると共に、保管庫1aの故障等に対する信頼性の向上に寄与し得る。
【0162】
また、本発明では、入庫用受け渡し機構13又は70、及び、出庫用受け渡し機構14又は80と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行うアーム機構は、上記した構成に限らず、例えば直交座標系ロボットであっても構わない。以下、この構成例について、図12を参照して簡単に説明する。
【0163】
図12(a)は、図5(a)に対応する、変形例に係るアーム機構40及び棚12を含む要部平面図を示す。図12(b)は、図5(b)に対応する、変形例に係るアーム機構40及び棚12を含む要部平面図を示す。
【0164】
本変形例は、第1及び第2実施形態に係る保管庫システムと比較して、アーム機構の構成のみが異なる。よって、以下では、第1及び第2実施形態と共通する要素については同一の符号を付し、その説明は省略する。
【0165】
変形例に係るアーム機構40は、いわゆる直交座標系ロボットであり、第1の移動機構41と、第1の移動機構41に対して略直交するように配置され、容器5を載置した状態で支持する第2の移動機構42と、を備える。第1の移動機構41は、その中央部がモーターM1を介して昇降体15abの一端に取り付けられている。このため、第1の移動機構41は、昇降体15abの一端を基点に又は保管庫1若しくは1aの中心軸L1を中心に旋回可能に構成される。第1の移動機構41は、水平一方向に第2の移動機構42を移動させる機構であり、具体的に、第2の移動機構42を、第1の移動機構41の延在方向Y30に沿って移動させる機能を有する。第2の移動機構42は、水平一方向に容器5を移動させる機構であり、具体的に、容器5を第1の移動機構41の延在方向Y30と直交する方向Y31に沿って移動させる機能を有する。
【0166】
以上の構成を有するアーム機構40は、モーターM1の回転動作により第1の移動機構41及び第2の移動機構42を保管庫1若しくは1aの中心軸L1を中心に旋回させつつ、第1の移動機構41及び第2の移動機構42の協調動作により入庫用受け渡し機構13又は70、及び、出庫用受け渡し機構14又は80と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う。
【0167】
例えば、図12(a)の状態(縮んだ状態)にあるアーム機構40が、指定の棚12xに対して容器5を移載するには次のようにして行う。まず、モーターM1の回転動作により、第2の移動機構42が指定の棚12xに向かうように、第1の移動機構41を所定の角度だけ旋回させる。次に、第1の移動機構41は、図12(b)に示すように、第2の移動機構42が指定の棚12x側と対向する位置まで、第2の移動機構42を水平一方向に移動させる。次に、第2の移動機構42は、容器5を指定の棚12xに向けて水平一方向に移動させる。こうして、指定の棚12xに容器5を載置することが可能となる。
【0168】
また、本発明では、上記した変形例に係るアーム機構の構成に限定されず、アーム機構は、水平一方向にのみ移動可能な移動機構だけで構成されていても構わない。この構成例について、図13を参照して簡単に説明する。
【0169】
図13(a)は、図12(a)に対応する、他の変形例に係るアーム機構43及び棚12を含む要部平面図を示す。図13(b)は、図12(b)に対応する、他の変形例に係るアーム機構43及び棚12を含む要部平面図を示す。
【0170】
本変形例は、第1及び第2実施形態に係る保管庫システムと比較して、アーム機構の構成及び棚12の配置のみが異なる。よって、以下では、第1及び第2実施形態と共通する要素については同一の符号を付し、その説明は省略する。
【0171】
変形例に係るアーム機構43は、容器5を載置した状態で支持する移動機構44を備える。移動機構44は、その中央部がモーターM1を介して昇降体15abの一端に取り付けられている。このため、移動機構44は、昇降体15abの一端を基点に又は保管庫1若しくは1aの中心軸L1を中心に旋回可能に構成される。移動機構44は、水平一方向に容器5を移動させる機構であり、具体的に、容器5を移動機構44の延在方向Y31に沿って移動させる機能を有する。また、棚12は、保管庫1若しくは1aの中心軸L1を中心に放射状に且つ保管庫1若しくは1aの高さ方向に列状に配置される。
【0172】
以上の構成を有するアーム機構43は、モーターM1の回転動作により移動機構44を保管庫1若しくは1aの中心軸L1を中心に旋回させつつ、移動機構44の動作により入庫用受け渡し機構13又は70、及び、出庫用受け渡し機構14又は80と、複数の棚12のうち指定された棚12との間で容器5の移載又は搬送を行う。
【0173】
例えば、図13(a)の状態(縮んだ状態)にあるアーム機構43が、指定の棚12xに対して容器5を移載するには次のようにして行う。まず、モーターM1の回転動作により、移動機構44が指定の棚12xに向かうように、移動機構44を所定の角度だけ旋回させる。次に、移動機構44は、図13(b)に示すように、容器5を指定の棚12xに向けて水平一方向に移動させる。こうして、指定の棚12xに容器5を載置することが可能となる。
【図面の簡単な説明】
【0174】
【図1】本発明の第1実施形態に係る保管庫システムの外観構成を示す斜視図。
【図2】第1実施形態に係る保管庫システムの高さ方向に沿った一断面図。
【図3】第1実施形態に係る保管庫システムの各種平面図。
【図4】第1実施形態に係る保管庫システムの動作例を示す各種平面図。
【図5】保管庫システムの棚に対するアーム機構の動作例を示す各種平面図。
【図6】第1比較例に係る保管庫システムの各種平面図。
【図7】第1比較例に係る保管庫システムの動作例を示す各種平面図。
【図8】第2実施形態に係る保管庫システムの高さ方向に沿った一断面図。
【図9】第2実施形態に係る保管庫システムの一平面図。
【図10】第2比較例に係る保管庫システムの一平面図。
【図11】本発明の各種変形例に係る保管庫システムの高さ方向に沿った各種断面図。
【図12】本発明の変形例に係るアーム機構及び棚を含む要部平面図。
【図13】本発明の他の変形例に係るアーム機構及び棚を含む要部平面図。
【符号の説明】
【0175】
1、1a 保管庫、 2、30 搬送装置、 3 コントローラ、 5 容器、 5b 蓋、 6 被収容物、 7a 床、 7b、7c、7d 天井、 11 筐体、 12 棚、 13、70 入庫用受け渡し機構(第1の受け渡し機構)、 13a、14a 移動機構、 14、80 出庫用受け渡し機構(第2の受け渡し機構)、 15、72、82 容器移載装置、 15f、40、43 アーム機構、 21、31 軌道、 22、33 搬送車、 100、100a、100b、100c 保管庫システム、 E 空間
【特許請求の範囲】
【請求項1】
筐体と、
前記筐体内に配置され、被収容物を収容する容器を載置する棚と、
前記筐体の外部との間で前記容器の受け渡しを行う第1及び第2の受け渡し機構と、
前記筐体内に配置され、前記第1及び第2の受け渡し機構と前記棚との間で前記容器の移載を行う容器移載装置と、を備え、
前記第1の受け渡し機構は、前記筐体の外部より受け渡された前記容器を、当該容器の向きを変えることなく前記容器移載装置に向けて移動して、当該容器を前記容器移載装置に受け渡し可能な状態とする移動機構を備えると共に、
前記第2の受け渡し機構は、前記容器移載装置より受け渡された前記容器を、当該容器の向きを変えることなく前記筐体の外部に向けて移動して、当該容器を前記筐体の外部に対して受け渡し可能な状態とする他の移動機構を備えることを特徴とする保管庫システム。
【請求項2】
軌道及び前記軌道に沿って走行する搬送車を有する搬送装置と、前記搬送車との間で被収容物を収容する容器の受け渡しを行う保管庫と、を備え、
前記保管庫は、
前記軌道に沿って前記搬送車を通過させるための開口を有する筐体と、
前記筐体内に配置され、前記容器を載置する棚と、
前記筐体内に配置され、前記容器の移載を行う容器移載装置と、を備え、
前記容器移載装置は、前記開口を通じて前記保管庫内に進入した前記搬送車との間において前記容器の移載を直接行うことを特徴とする保管庫システム。
【請求項3】
前記移動機構及び前記他の移動機構は、前記筐体の外部から内部にかけて延在する搬送用のコンベアとして構成されることを特徴とする請求項1に記載の保管庫システム。
【請求項4】
前記容器移載装置は、前記筐体の高さ方向及び当該高さ方向とは逆方向に向けて昇降可能な昇降機構と、前記筐体の中心軸に向かって延びる前記昇降機構の一端に支持されたアーム機構と、を備え、
前記アーム機構は、前記筐体の中心軸回りに旋回可能に構成されると共に前記筐体の中心軸に近づく方向及び前記筐体の中心軸と離隔する方向に伸縮可能な複数のアームと、前記複数のアームのうち何れかのアームに支持され、前記容器を保持する容器保持部と、を有して構成されることを特徴とする請求項1又は2に記載の保管庫システム。
【請求項5】
前記昇降機構は、前記筐体の高さ方向に延在する案内部と、前記案内部に沿って昇降可能な昇降体と、を備えることを特徴とする請求項4に記載の保管庫システム。
【請求項6】
前記筐体は4つの側面を有する箱状の形状を有し、
前記4つの側面のうち1つの側面側において、当該1つの側面の高さ方向に沿う位置には前記案内部が配置され、
前記4つの側面のうち残りの3つの側面側の各々において、当該3つの側面の各々の高さ方向に沿う位置には、前記棚が間隔をあけて複数配置され、
前記アーム機構は、前記案内部及び前記複数の前記棚に取り囲まれる位置に配置され、
前記案内部及び前記複数の前記棚の内側には、人が入り込んで作業することが可能な空間が形成されていることを特徴とする請求項5に記載の保管庫システム。
【請求項7】
前記筐体に隣接する位置に配置された他の軌道と、前記他の軌道に沿って走行する他の搬送車とを有する他の搬送装置を備え、
前記第1及び第2の受け渡し機構は、前記筐体の外部において、前記他の搬送車との間で前記容器の受け渡しを行うことを特徴とする請求項1に記載の保管庫システム。
【請求項1】
筐体と、
前記筐体内に配置され、被収容物を収容する容器を載置する棚と、
前記筐体の外部との間で前記容器の受け渡しを行う第1及び第2の受け渡し機構と、
前記筐体内に配置され、前記第1及び第2の受け渡し機構と前記棚との間で前記容器の移載を行う容器移載装置と、を備え、
前記第1の受け渡し機構は、前記筐体の外部より受け渡された前記容器を、当該容器の向きを変えることなく前記容器移載装置に向けて移動して、当該容器を前記容器移載装置に受け渡し可能な状態とする移動機構を備えると共に、
前記第2の受け渡し機構は、前記容器移載装置より受け渡された前記容器を、当該容器の向きを変えることなく前記筐体の外部に向けて移動して、当該容器を前記筐体の外部に対して受け渡し可能な状態とする他の移動機構を備えることを特徴とする保管庫システム。
【請求項2】
軌道及び前記軌道に沿って走行する搬送車を有する搬送装置と、前記搬送車との間で被収容物を収容する容器の受け渡しを行う保管庫と、を備え、
前記保管庫は、
前記軌道に沿って前記搬送車を通過させるための開口を有する筐体と、
前記筐体内に配置され、前記容器を載置する棚と、
前記筐体内に配置され、前記容器の移載を行う容器移載装置と、を備え、
前記容器移載装置は、前記開口を通じて前記保管庫内に進入した前記搬送車との間において前記容器の移載を直接行うことを特徴とする保管庫システム。
【請求項3】
前記移動機構及び前記他の移動機構は、前記筐体の外部から内部にかけて延在する搬送用のコンベアとして構成されることを特徴とする請求項1に記載の保管庫システム。
【請求項4】
前記容器移載装置は、前記筐体の高さ方向及び当該高さ方向とは逆方向に向けて昇降可能な昇降機構と、前記筐体の中心軸に向かって延びる前記昇降機構の一端に支持されたアーム機構と、を備え、
前記アーム機構は、前記筐体の中心軸回りに旋回可能に構成されると共に前記筐体の中心軸に近づく方向及び前記筐体の中心軸と離隔する方向に伸縮可能な複数のアームと、前記複数のアームのうち何れかのアームに支持され、前記容器を保持する容器保持部と、を有して構成されることを特徴とする請求項1又は2に記載の保管庫システム。
【請求項5】
前記昇降機構は、前記筐体の高さ方向に延在する案内部と、前記案内部に沿って昇降可能な昇降体と、を備えることを特徴とする請求項4に記載の保管庫システム。
【請求項6】
前記筐体は4つの側面を有する箱状の形状を有し、
前記4つの側面のうち1つの側面側において、当該1つの側面の高さ方向に沿う位置には前記案内部が配置され、
前記4つの側面のうち残りの3つの側面側の各々において、当該3つの側面の各々の高さ方向に沿う位置には、前記棚が間隔をあけて複数配置され、
前記アーム機構は、前記案内部及び前記複数の前記棚に取り囲まれる位置に配置され、
前記案内部及び前記複数の前記棚の内側には、人が入り込んで作業することが可能な空間が形成されていることを特徴とする請求項5に記載の保管庫システム。
【請求項7】
前記筐体に隣接する位置に配置された他の軌道と、前記他の軌道に沿って走行する他の搬送車とを有する他の搬送装置を備え、
前記第1及び第2の受け渡し機構は、前記筐体の外部において、前記他の搬送車との間で前記容器の受け渡しを行うことを特徴とする請求項1に記載の保管庫システム。
【図1】


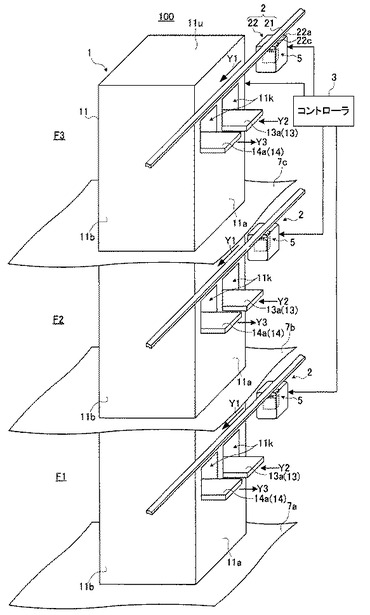
【図2】
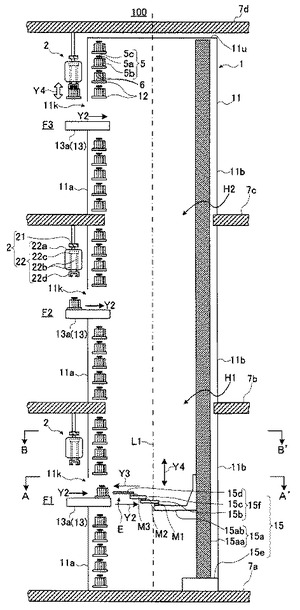
【図3】
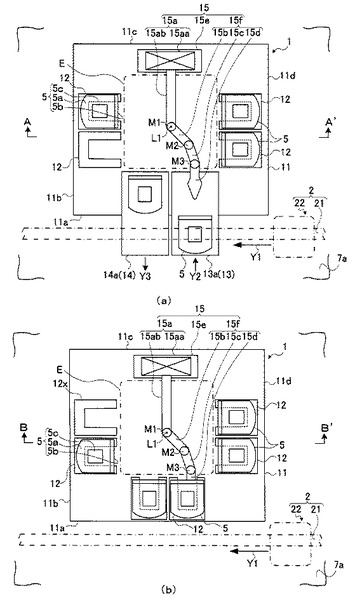
【図4】
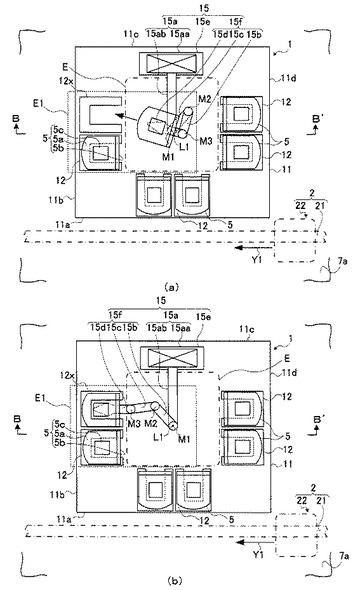
【図5】
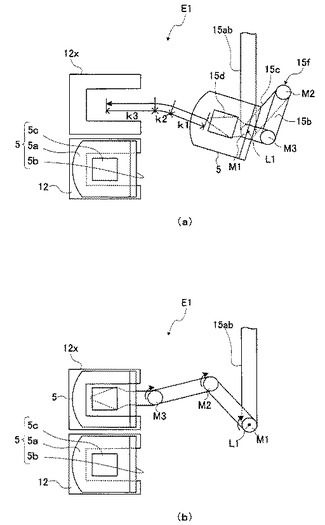
【図6】

【図7】
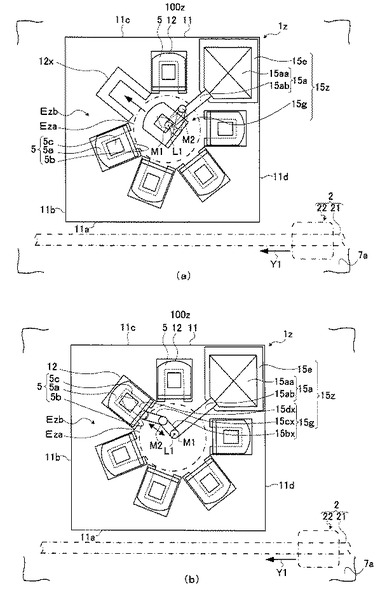
【図8】
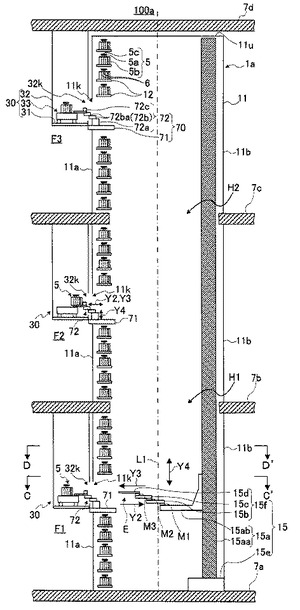
【図9】
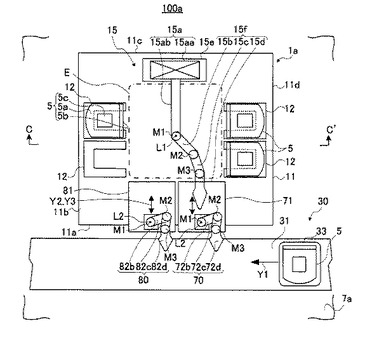
【図10】

【図11】
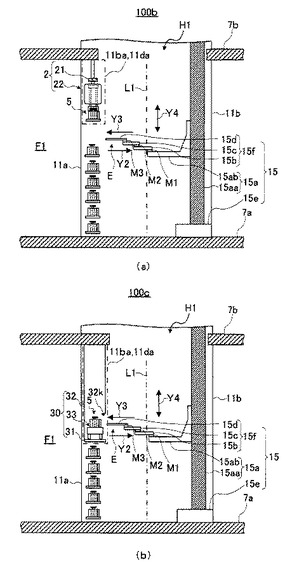
【図12】
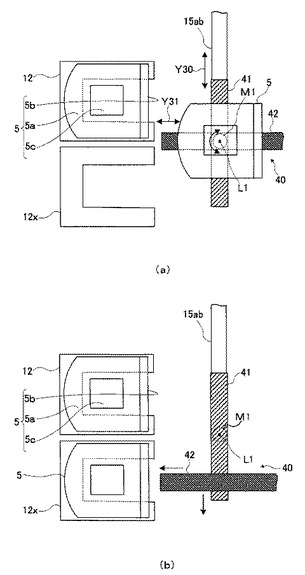
【図13】
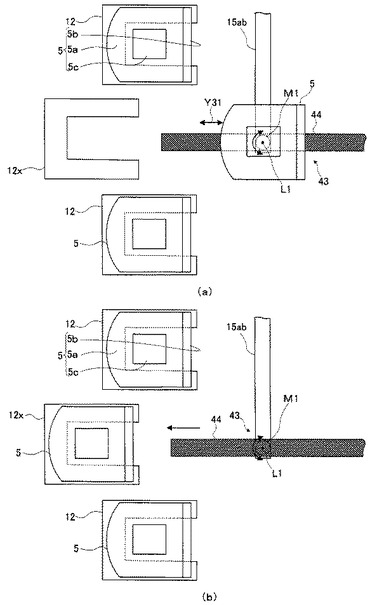
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−40979(P2010−40979A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−205378(P2008−205378)
【出願日】平成20年8月8日(2008.8.8)
【出願人】(302059274)アシスト テクノロジーズ ジャパン株式会社 (146)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月8日(2008.8.8)
【出願人】(302059274)アシスト テクノロジーズ ジャパン株式会社 (146)
【Fターム(参考)】
[ Back to top ]