
経路案内装置

【課題】 経路の再探索を、早い時期に適切に実行することが可能な経路案内装置を提供すること。
【解決手段】 ナビゲーション装置は、誘導経路が車両の進路前方に位置する分岐点において右左折を伴う経路であるか否か判断し(S300)、右左折を伴う経路であると、上記分岐点より車両側の第一地点を車両が通過した後、上記分岐点と第一地点との間に位置する第二地点を通過するまでの期間に、運転者が向けた視線の向きを表す情報を視線検出装置から取得して、上記期間に、運転者の視線が所定時間以上、車両前後方向に延びる基準線から上記分岐点より先の誘導経路側に所定角度より大きく向いたか否か判断する(S600)。そして、運転者の視線が誘導経路側に所定時間以上、所定角度より大きく向いていないと判断すると、上記分岐点において現在の誘導方向とは異なる方向に車両を誘導可能な経路を探索し、これを誘導経路に設定する(S800)。
【解決手段】 ナビゲーション装置は、誘導経路が車両の進路前方に位置する分岐点において右左折を伴う経路であるか否か判断し(S300)、右左折を伴う経路であると、上記分岐点より車両側の第一地点を車両が通過した後、上記分岐点と第一地点との間に位置する第二地点を通過するまでの期間に、運転者が向けた視線の向きを表す情報を視線検出装置から取得して、上記期間に、運転者の視線が所定時間以上、車両前後方向に延びる基準線から上記分岐点より先の誘導経路側に所定角度より大きく向いたか否か判断する(S600)。そして、運転者の視線が誘導経路側に所定時間以上、所定角度より大きく向いていないと判断すると、上記分岐点において現在の誘導方向とは異なる方向に車両を誘導可能な経路を探索し、これを誘導経路に設定する(S800)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現在地から目的地までの経路を案内する経路案内装置に関する。
【背景技術】
【0002】
従来より、経路案内装置としては、利用者の操作により入力装置から目的地の指定情報が入力されると、現在地から目的地までの最適な経路を探索し、これを誘導経路に設定して、運転者が経路に沿って車両を走行させることができるように案内するカーナビゲーション装置が知られている。
【0003】
また、経路の案内方法としては、設定した誘導経路を、道路地図情報と共に、液晶ディスプレイ等の表示装置に表示させる方法や、交差点等の分岐点で旋回方向を音声案内する方法が知られている。但し、道路地図情報と共に誘導経路を表示装置に表示させて、交差点等で旋回方向を案内する程度であると、運転者が旋回地点を錯誤することが多いため、近年では、交差点周囲の景色を三次元でアニメーション表示するなどして、旋回地点を運転者が錯誤しないようにしている。
【0004】
また、近年では、運転者の視線を検出し、この検出結果に基づいて、経路誘導に対する運転者の視認行動が正しいか否かを判断し、正しくない場合には、運転者を視認誘導して、正しい方向に車両を導く方法が発明されている(例えば、特許文献1〜3参照)。
【特許文献1】特開2004−037149号公報
【特許文献2】特開2004−037150号公報
【特許文献3】特開2004−053541号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような様々な案内を行っても、運転者は、誘導経路とは異なる経路に、車両を走行させることがある。典型的な例としては、運転者が案内の内容を錯誤して、誘導経路とは異なる経路に、車両を走行させてしまう場合である。また、誘導経路に渋滞が発生していると、運転者は、渋滞を回避するために、意識的に誘導経路とは異なる経路に車両を走行させることがある。また、走行レーンの変更ができずに、旋回(右左折)を案内する分岐点で、車両を直進させる場合がある。
【0006】
このため、カーナビゲーション装置には、車両が誘導経路から一定距離又は一定時間以上外れると、現在の車両位置から目的地までの経路を再探索するリルート機能が設けられていることが多い。
【0007】
しかしながら、従来装置では、車両が誘導経路から一定距離又は一定時間以上外れないと、経路の再探索が行われないため、誘導経路を外れてから所定期間は、適切な経路案内をすることができないといった問題があった。また、再探索後の経路が、ただちに車両の旋回(右左折)を伴うものである場合には、走行レーン等の関係から、その経路に沿って車両を走行させることができず、運転者に不満が及ぶ可能性があった。
【0008】
本発明は、こうした問題に鑑みなされたものであり、経路の再探索を、早い時期に適切に実行することが可能な経路案内装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するためになされた本発明の経路案内装置では、地図情報取得手段が道路地図情報を取得し、位置情報取得手段が車両の現在位置を表す位置情報を取得する。例えば、地図情報取得手段は、道路地図情報を記憶する装置から道路地図情報を取得し、位置情報取得手段は、車両の現在位置を検出する位置検出装置から車両の現在位置を表す位置情報を取得する。また、この経路案内装置では、経路探索手段が、上記取得した道路地図情報及び位置情報に基づいて、車両の現在位置から予め設定された目的地までの経路を探索し、誘導経路を設定する。
【0010】
この経路案内装置は、車両の運転者が向けた視線の向きを表す情報を、運転者の視線の向きを検出する視線検出装置から取得する視線情報取得手段と、上記誘導経路における車両の進路前方に位置する分岐点の一つを、所定の規則に従って選択し、選択した分岐点を基準分岐点として、この基準分岐点より車両側に所定距離手前の地点を車両が通過したか否かを、上記位置情報に基づき判断する通過判断手段と、を備え、この通過判断手段により車両が上記所定距離手前の地点を通過したと判断されると、上記視線情報取得手段が取得する視線の向きを表す情報に基づき、予測判定手段が、上記基準分岐点にて、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する。
【0011】
予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測されると、経路案内装置は、リルート手段にて、経路探索手段に経路の再探索を実行させる。具体的には、基準分岐点から予め設定された目的地までの経路を探索させる。
【0012】
このように、本発明の経路案内装置では、運転者の視線の向きに基づいて、車両の進路前方に位置する分岐点(交差点等)で運転者が誘導経路に沿って車両を走行させるか否かを予測し、運転者が誘導経路に沿って車両を走行させないと予測される場合には、経路の再探索(リルート)を実行するので、運転者が誘導経路とは異なる経路に車両を走行させる場合に、従来装置よりも早く適切に経路の再探索を実行することができる。尚、本発明の経路案内装置は、請求項2記載のように構成されてもよい。
【0013】
請求項2記載の経路案内装置では、上記位置情報取得手段が取得した位置情報に基づき、通過判断手段が、上記経路探索手段により設定された誘導経路における車両の旋回を伴う分岐点であって、車両の進路前方に位置する次(最寄)の分岐点を基準分岐点として選択し、この基準分岐点より車両側に所定距離手前の地点を車両が通過したか否かを判断する。また、この通過判断手段により、車両が上記所定距離手前の地点を通過したと判断されると、視線情報取得手段が運転者の視線の向きを検出する視線検出装置から取得した上記視線の向きを表す情報に基づいて、予測判定手段が、上記基準分岐点において、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する。
【0014】
また、リルート手段は、予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測判定されると、経路探索手段に、車両の現在位置から予め設定された目的地までの経路であって、現在設定されている誘導経路が上記基準分岐点において示す誘導方向とは異なる方向に車両を誘導可能な経路を探索させる。
【0015】
この経路案内装置によれば、運転者が誘導経路とは異なる経路に車両を走行させる場合に、従来装置よりも早く適切に経路の再探索を実行することができ、例えば、運転者が案内を正しく理解しておらず、右左折を案内する分岐点(交差点等)で直進してしまう場合でも、分岐点通過前に直ちに誘導経路を修正し、その誘導経路を運転者に案内することができる。
【0016】
尚、右左折を案内する分岐点で車両が直進してしまう事象に限定して、本発明を適用する場合には、車両の現在位置から予め設定された目的地までの経路であって、上記基準分岐点で車両が直進する場合に通過する道路を含む目的地までの経路を経路探索手段に探索させ、これを誘導経路に設定するようにリルート手段を構成するとよい。このようにリルート手段を構成すると、右左折を案内する分岐点で車両が直進してしまう場合であっても、分岐点通過直後から適切に経路案内をすることができる。即ち、再探索後の経路が、分岐点通過後ただちに車両の旋回(右左折)を伴うものであっても、それを早い時期に適切に案内することができる。
【0017】
また、予測判定手段は、請求項3記載のように構成されるとよい。請求項3記載の経路案内装置における予測判定手段は、視線情報取得手段が取得した上記視線の向きを表す情報に基づき、運転者の視線が、車両の前後方向に延びる基準線から、上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを、視線判断手段にて判断し、視線判断手段により、運転者の視線が、基準線から上記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測する。
【0018】
運転者の視線が、車両の進路前方に位置する上記分岐点より先の誘導経路側(具体的に、誘導経路が分岐点で左折(右折)するものである場合には、基準線より左側(右側))に所定角度以上向く場合には、運転者が誘導経路に沿って車両を走行させる可能性が高いということができるので、この経路案内装置によれば、簡単な演算処理で運転者が旋回地点で誘導経路に沿って車両を走行させるか否かを正確に予測することができる。
【0019】
尚、上記基準線は、車両の前後方向に対して平行に延びる線の他、その線から車両の左右方向に所定角度傾いた線も含むものとする。例えば、上記基準線は、運転者が車両を直進させる場合に最も頻度の高い視線の方向に設定されるとよい。また、上記所定角度としては、試験により予め定められたものを用いてもよいし、車両位置と分岐点との位置関係から算出したものを用いてもよい。また、上記所定角度は、分岐点の種類に関係なく固定値にされてもよいし、分岐点の種類毎に設定されてもよい。
【0020】
また、上記予測判定手段は、請求項4記載のように構成されるとよい。請求項4記載の経路案内装置における予測判定手段は、視線情報取得手段が取得した上記視線の向きを表す情報に基づき、運転者の視線が、所定時間以上、車両の前後方向に延びる基準線から、上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを、視線判断手段により判断し、視線判断手段により、運転者の視線が、所定時間以上、基準線から上記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測する。
【0021】
請求項4記載の経路案内装置によれば、運転者の視線が、所定期間に、所定時間以上、上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断することにより、運転者が旋回地点で誘導経路に沿って車両を走行させるか否かを予測するので、右左折前の視認行動(右左折位置確認・安全確認のための視認行動)とは関係なく向けた視線により、誤った予測結果を導いてしまうのを抑えることができる。
【0022】
また、上記経路案内装置における視線情報取得手段は、請求項5記載のように構成されるとよい。請求項5記載の経路案内装置における視線情報取得手段は、通過判断手段により、車両が上記所定距離手前の地点としての第一の地点を通過したと判断されてから、上記基準分岐点と第一の地点との間に位置する第二の地点を、車両が通過するまでの期間に、車両の運転者が向けた視線の向きを表す情報を、視線検出装置から取得する。
【0023】
この経路案内装置によれば、第一の地点から第二の地点までの期間の運転者の視認行動に基づいて、上記予測判定を行うので、瞬間的な運転者の視認行動に基づいて上記予測判定を行うよりも、高精度に上記予測判定を行うことができる。
【0024】
尚具体的に、視線判断手段は、車両が第一の地点を通過してから第二の地点を通過するまでの期間に、運転者の視線が、継続して所定時間以上、基準線から上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断する構成にされてもよいし、上記期間において運転者の視線が基準線から上記基準分岐点より先の誘導経路側に所定角度以上向いた時間の総計が、所定時間以上であるか否かを判断する構成にされてもよい。
【0025】
また、分岐点に設置された信号機が「黄」「赤」の場合には、運転者の視線が誘導経路側よりも信号機側を向く可能性が高くなり、予測判定手段による予測結果の信頼性が低下する可能性があるから、このような場合には、経路の再探索が行われないように経路案内装置を構成するとよい。
【0026】
請求項6記載の経路案内装置は、車両の走行速度を検出する速度検出装置から、車両の走行速度を表す速度情報を取得する速度情報取得手段を備え、速度情報取得手段が取得した速度情報に基づき、速度判断手段にて、車両の走行速度が予め定められた所定速度未満であるか否かを判断し、速度判断手段により車両の走行速度が上記所定速度未満であると判断されると、速度依存型禁止手段により、リルート手段の動作を禁止する。
【0027】
この経路案内装置によれば、車両の走行速度が遅く、運転者の視線が信号機側を向いている可能性が高い場合に、リルート手段が動作しないので、誤った予測により不適切に誘導経路の変更が行われてしまうのを防止することができる。
【0028】
また、分岐点付近に、分岐点より先の誘導経路の視認を妨げるような建造物があると、運転者の視線が誘導経路側に向きにくいので、各分岐点毎に、その分岐点付近に運転者の視界から分岐点より先の道路を遮蔽する可能性のある建造物が存在するか否かを表す遮蔽物情報を、道路地図情報に付し、経路案内装置を請求項7記載のように構成するとよい。
【0029】
請求項7記載の経路案内装置は、上記遮蔽物情報に基づいて、通過判断手段による通過判断の基準にされた車両の進路前方に位置する上記基準分岐点付近に、上記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断する遮蔽物判断手段を備え、この遮蔽物判断手段により、上記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断されると、遮蔽物依存型禁止手段にて、リルート手段の動作を禁止する。
【0030】
この経路案内装置によれば、運転者から基準分岐点より先の誘導経路を視認することができない可能性がある場合に、リルート手段を動作させないので、誤った予測により不適切に誘導経路の変更が行われてしまうのを防止することができる。
【0031】
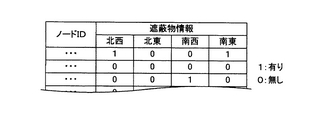
尚、上記遮蔽物情報は、例えば、分岐点を基準とした各方角毎に、運転者の視界から分岐点より先の道路を遮蔽する可能性のある建造物が存在するか否かを表すフラグ情報を備える構成とすることができる。
【0032】
また、請求項1〜7記載の経路案内装置は、上記各手段としての機能をコンピュータに実現させるためのプログラムを、コンピュータに実行させることにより構成されてもよい。また、このプログラムは、フレキシブルディスク、光磁気ディスク、CD−ROM、ハードディスク、ROM等のコンピュータ読み取り可能な記録媒体に記録された状態で、提供されてもよいし、ネットワークを通じて提供されてもよい。
【発明を実施するための最良の形態】
【0033】
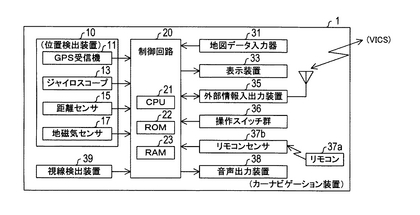
以下、本発明の実施例について図面と共に説明する。図1は、本発明が適用されたカーナビゲーション装置1の構成を表すブロック図である。
本実施例のナビゲーション装置1は、主に、車両の現在位置及び進行方位等を検出する位置検出装置10と、道路地図情報を含む地図データが記録された記憶媒体(CD−ROM、DVD、ハードディスク等)から地図データ等を読み出し、これを制御回路20に入力する地図データ入力器31と、表示装置33と、外部情報入出力装置35と、利用者の操作情報を制御回路20に入力するための操作スイッチ群36と、操作スイッチ群36と同様に利用者の操作情報を制御回路20に入力するためのリモートコントロール端末(以下、リモコンと称す。)37aと、リモコン37aから受信した信号を制御回路20に入力するリモコンセンサ37bと、音声出力装置38と、運転者の視線の向きを検出する視線検出装置39と、装置内各部を統括制御する制御回路20と、を備える。
【0034】
位置検出装置10は、GPS(Global Positioning System)用の人工衛星から送信されてくる電波をGPSアンテナを介して受信し、車両の現在位置等を検出するGPS受信機11と、車両に加えられる回転運動(車両の旋回運動)の大きさを検出するジャイロスコープ13と、車両の単位時間当たりの走行距離を計測する距離センサ15と、地磁気から進行方位を検出する地磁気センサ17とを備える。制御回路20は、互いに性質の異なる誤差を有するこれら各センサ等11〜17の出力信号を、補完しながら使用して、車両の現在位置及び進行方位を確定する構成にされている。尚、図1に示した位置検出装置10の構成は一例であって、位置検出装置10は、上述したうちの一部のセンサで構成されたものであってもよいし、ステアリングの回転センサや各転動輪の車輪センサ、傾斜角センサ等が更に付加されたものであってもよい。
【0035】
一方、地図データ入力器31は、道路地図情報を含む上記地図データや、建造物等に関するデータ、位置検出の精度向上のためのマップマッチング用データ等の各種データを、記録媒体から読み出し、制御回路20に入力する構成にされている。
【0036】
地図データに含まれる道路地図情報は、分岐点等の複数のノード間をリンクにより接続して道路地図を形成するものであって、各リンクに対し、リンクの識別番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端の位置座標、リンクの道路幅及び道路種別等のデータからなるリンク情報を備える。また、この道路地図情報は、各ノードに対し、ノードの識別番号(ノードID)、ノードの位置座標、ノード種別(分岐点に関する情報、信号機の有無を表す情報)等のデータからなるノード情報を備える。
【0037】
その他、この道路地図情報は、分岐点を表す各ノード毎に図2に示す構成の遮蔽物情報を備える。図2は、遮蔽物情報の構成を表す説明図である。
遮蔽物情報は、自身に関連付けられたノードの付近に、運転者の視界からそのノード(分岐点)より先の道路を遮蔽する可能性のある建造物(以下、これを「遮蔽物」と表現する。)が存在するか否かを表すフラグ情報を、各方角毎に備える。具体的に、本実施例の遮蔽物情報は、分岐点を表すノードIDに関連付けられて、北西・北東・南西・南東の計4つの方角毎に、遮蔽物が有ることを示す値「1」又は遮蔽物が無いことを示す値「0」の二値で表されたフラグ情報を備える。尚、フラグ情報は、車両を走行させて、試験的にデータを収集し、これを解析することで作成することができる。
【0038】
また、表示装置33は、液晶ディスプレイ等からなるカラー表示装置であり、その表示画面には、地図画面として、車両の現在位置を表すマーク、地図データ入力器31より入力される地図データ、誘導経路などが重ねて表示される。外部情報入出力装置35は、外部、例えばVICS(Vehicle Information and Communication System)などのインフラから提供される情報を受信すると共に、外部へ各種情報を送信するための装置であり、この外部情報入出力装置35が外部から受信した情報は、制御回路20にて処理される。
【0039】
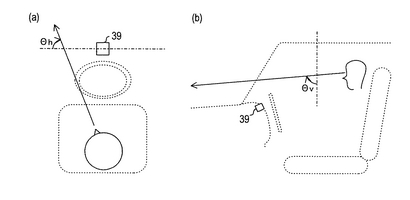
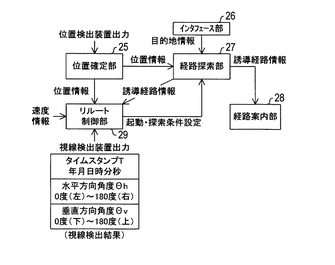
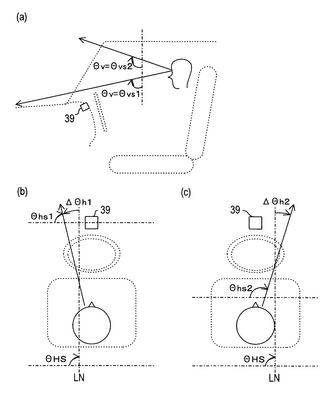
その他、視線検出装置39は、頭部の運動に左右されず運転者の視線を検出することが可能な非接触式の視線検出装置であり、ダッシュボード等、運転者の目を撮影可能な位置に設置される。具体的に、本実施例の視線検出装置39は、図3,図4に示すように、運転者の視線についての検出結果として、車両の左側を0度、右側を180度とした運転者の視線の水平方向の角度Θhと、車両の下方を0度、上方を180度とした運転者の視線の垂直方向の角度Θvと、それら角度Θh及びΘvを検出した時刻Tと、を出力し、これを制御回路20に入力する。尚、図3は、視線検出装置39により検出される角度Θh及びΘvを表す説明図であり、図4は、制御回路20にて実現される機能の一部を表した機能ブロック図である。
【0040】
制御回路20は、各種演算処理を行うためのCPU21と、CPU21により実行される各種プログラムを記憶するROM22と、CPU21によるプログラムの実行時に、作業用メモリとして使用されるRAM23と、を備え、これらを用いて、装置内各部を統括制御し、経路探索・案内等の各種機能を実現する。
【0041】
例えば、制御回路20は、ROM22に記憶されたプログラムをCPU21に実行させることにより、位置確定部25として機能し、センサ等11〜17の出力信号を、車両の位置情報として位置検出装置10から取得し、これらの情報に基づき車両の現在位置及び進行方位を確定する。
【0042】
また、制御回路20は、ROM22に記憶されたプログラムをCPU21に実行させることにより、インタフェース部26として機能し、選択画面の表示等、表示装置33を通じて利用者とのインタフェースを提供する。
【0043】
インタフェース部26は、リモコン37aを介してリモコンセンサ37bから、あるいは操作スイッチ群36から、目的地の指定情報が入力されると、CPU21にROM22に記憶された経路探索用のプログラムを実行させる。これにより、制御回路20は、経路探索部27として機能する。
【0044】
経路探索部27は、位置確定部25から車両の現在位置を表す情報を取得すると共に、地図データ入力器31を制御して、地図データ入力器31から道路地図情報を取得し、これら車両の現在位置を表す情報及び道路地図情報に基づき、ダイクストラ法等の周知の経路探索方法を用いて、位置確定部25が確定した車両の現在位置から指定された目的地までの最適な経路を探索し、それを誘導経路に設定する。
【0045】
また、制御回路20のCPU21は、誘導経路が設定されている場合、経路案内用のプログラムを実行することにより、経路案内部28として機能する。経路案内部28は、位置確定部25にて確定された車両の現在位置を表す情報に基づき、車両の走行路を理解し、経路探索部27にて設定された誘導経路に沿って、運転者が車両を走行させることができるように、適宜、音声出力装置38に、経路案内用の音声信号を入力して、音声出力装置38に経路を音声案内させる。
【0046】
また、制御回路20は、ROM22に記憶されたプログラムをCPU21に実行させることにより、車両が誘導経路に沿って走行しない場合のリルート機能を実現する。
上記プログラムにより制御回路20で実現されるリルート制御部29は、車両が誘導経路から一定距離又は一定時間以上外れると、経路探索部27に、現在の車両位置から目的地までの経路を再探索させ、誘導経路を再設定させる。また、図5(a)に示す拡張リルート制御処理を、所定条件が満足される度(例えば車両が分岐点を通過する度)に実行して、本発明に係る機能を実現する。尚、図5(a)は、CPU21が繰返し実行する拡張リルート制御処理を表すフローチャートである。
【0047】
拡張リルート制御処理を実行すると、CPU21は、位置確定部25から車両の現在位置及び進行方位を表す情報を取得し(S100)、この情報に基づき現在位置から先の誘導経路、即ち車両の進路前方の誘導経路を解析して(S200)、誘導経路が、車両の現在位置から進路前方の所定距離以内に、旋回(右左折)を伴う分岐点を含むものであるか否か判断する(S300)。
【0048】
ここで、誘導経路が、車両の現在位置から進路前方の所定距離以内に、旋回(右左折)を伴う分岐点を含むものではないと判断すると(S300でNo)、CPU21は、S100に移行して、現在位置から車両の進路前方の所定距離以内に、旋回(右左折)を伴う分岐点が現れるまで、上述の処理を繰り返す。そして、誘導経路が、車両の現在位置から進路前方の所定距離以内に、旋回(右左折)を伴う分岐点を含むものであると判断すると(S300でYes)、CPU21は、車両の進路前方の所定距離内に存在する分岐点であって、旋回(右左折)を伴う最寄の分岐点を、遮蔽物の判定対象に設定し、S400にて、図6に示す遮蔽物判定前処理を実行する。尚、図6は、CPU21が実行する遮蔽物判定前処理を表すフローチャートである。
【0049】
遮蔽物判定前処理を実行すると、CPU21は、S100での取得情報に基づき、車両の進行方位が東であるか否か判断する(S410)。そして、進行方位が東であると判断すると(S410でYes)、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別する(S420)。ここで、右折するものであると判断すると、CPU21は、S423にて、上記判定対象の分岐点のノードIDに関連付けられた遮蔽物情報を地図データ入力器31から取得し、この遮蔽物情報から南西のフラグ情報を取得する。一方、S420で誘導経路が上記判定対象の分岐点で左折するものであると判断すると、S427にて、上述と同様の方法で、上記判定対象の分岐点に対応する遮蔽物情報から北西のフラグ情報を取得する。
【0050】
尚、このように車両の進行方位が東である場合に、南西又は北西のフラグ情報を取得するのは、車両が分岐点の西から東方向に進んでいる場合には、分岐点より南西又は北西に存在する遮蔽物によって、分岐点から南北に延びる道路が運転者の視線から遮蔽されてしまう可能性があるためである。このようにして、S423又はS427でフラグ情報を読み出した後には、S500に処理を移行する。
【0051】
一方、CPU21は、車両の進行方位が東ではないと判断すると(S410でNo)、進行方位が西であるか否か判断し(S430)、西であると判断すると(S430でYes)、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別する(S440)。
【0052】
ここで、右折するものであると判断すると、CPU21は、S443にて、上記判定対象の分岐点に対応する遮蔽物情報から北東のフラグ情報を取得し、左折するものであると判断すると、S447にて、上記判定対象の分岐点に対応する遮蔽物情報から南東のフラグ情報を取得する。また、このようにして、フラグ情報を読み出した後には、S500に処理を移行する。
【0053】
また、CPU21は、車両の進行方位が西ではないと判断すると(S430でNo)、進行方位が南であるか否か判断し(S450)、南であると判断すると(S450でYes)、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別する(S460)。
【0054】
ここで、右折するものであると判断すると、CPU21は、S463にて、上記判定対象の分岐点に対応する遮蔽物情報から北西のフラグ情報を取得し、左折するものであると判断すると、S467にて、上記判定対象の分岐点に対応する遮蔽物情報から北東のフラグ情報を取得する。また、このようにして、フラグ情報を読み出した後には、S500に処理を移行する。
【0055】
一方、車両の進行方位が南ではなく北であると判断すると(S450でNo)、その後S470で、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別し、右折するものであると判断すると、S473にて、上記判定対象の分岐点に対応する遮蔽物情報から南東のフラグ情報を取得し、左折するものであると判断すると、S477にて、上記判定対象の分岐点に対応する遮蔽物情報から南西のフラグ情報を取得する。そして、S500に処理を移行する。
【0056】
S500において、CPU21は、上記遮蔽物判定前処理により取得したフラグ情報に基づいて、車両の進路前方に位置する上記判定対象の分岐点付近に、分岐点より先の誘導経路(即ち、誘導経路に沿って車両が走行する場合に、上記判定対象の分岐点通過後に車両が走行する予定の経路)を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断する。具体的に、CPU21は、上記遮蔽物判定前処理により取得したフラグ情報が値「1」を示していると、分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断して(S500でYes)、S600〜S800の処理を実行せずに、当該拡張リルート制御処理を一旦終了する。
【0057】
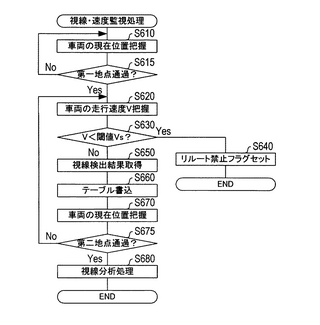
一方、上記遮蔽物判定前処理により取得したフラグ情報が値「0」を示していると、CPU21は、分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在しないと判断し(S500でNo)、図7に示す視線・速度監視処理を実行する(S600)。尚、図7は、CPU21が実行する視線・速度監視処理を表すフローチャートである。
【0058】
視線・速度監視処理を実行すると、CPU21は、位置確定部25から、車両の現在位置及び進行方位を表す情報を取得し(S610)、この情報と、道路地図情報に含まれる上記判定対象の分岐点の位置座標と、に基づき、車両が上記判定対象の分岐点より手前側所定距離X1離れた地点(以下、これを「第一地点」と表現する。)を、分岐点側に通過したか否かを判断する(S615)。尚、この判断は、道路地図情報に含まれる上記判定対象の分岐点の位置座標と、車両の現在位置の座標との差が所定距離X1未満で、車両の進行方位が分岐点側を向いているか否かを判断することにより、実現することができる。
【0059】
ここで、車両が第一地点を通過していないと判断すると(S615でNo)、CPU21は、車両が第一地点を通過するまで待機し、通過したと判断すると(S615でYes)、S620にて、車両の走行速度Vを把握する。具体的に、CPU21は、車両の走行速度を検出可能な距離センサ15の出力信号を速度情報として取得し、この出力信号が示す単位時間当たりの車両の走行距離を、車両の走行速度Vとして設定する。
【0060】
この後、CPU21は、車両の走行速度Vが、試験等に基づいて予め設定された閾値Vs未満であるか否か判断し(S630)、閾値Vs未満であると判断すると(S630でYes)、リルートを禁止するためのリルート禁止フラグをセットし(S640)、S700に移行する。
【0061】
一方、車両の走行速度Vが閾値Vs以上であると判断すると(S630でNo)、CPU21は、視線検出装置39から、その時点での運転者の視線の向きを表す図4に示す構成の視線検出結果を取得し(S650)、これをRAM23に書き込んで、図8に示す構成の検出結果履歴テーブルを作成する(S660)。尚、図8は、検出結果履歴テーブルの構成を表す説明図である。具体的に、CPU21は、視線検出装置39から取得した視線検出結果と、その視線検出時点で車両が位置する地点の上記判定対象の分岐点からの距離Xとを、互いに関連付けて、検出結果履歴テーブルに書き込む(S660)。
【0062】
その後、CPU21は、位置確定部25から車両の現在位置及び進行方位を表す情報を取得し(S670)、この情報に基づいて、上記判定対象の分岐点と第一地点との間に位置する地点であって上記判定対象の分岐点からの距離X2(X2<X1)の地点(以下、これを「第二地点」と表現する。)を、車両が分岐点側に通過したか否か判断する(S675)。
【0063】
ここで、車両が第二地点を通過していないと判断すると(S675でNo)、CPU21は、S620に移行して、現時点での車両の走行速度Vを把握し、車両の走行速度Vが依然として閾値Vs以上である場合には、その時点での運転者の視線の向きを表す視線検出結果を視線検出装置39から取得し(S650)、これを現時点での車両位置を表す距離X(即ち、分岐点からの距離X)の情報と共に、検出結果履歴テーブルに書き込む(S660)。尚、この際には、後の処理にてタイムスタンプが表す時刻Tから視線を向けた時間を算出する都合上、検出結果を検出順に並べて検出結果履歴テーブルを作成する。
【0064】
一方、車両の走行速度Vが閾値Vs未満に下がった場合、CPU21は、S630でYesと判断して、リルート禁止フラグをセットし(S640)、S700に移行する。
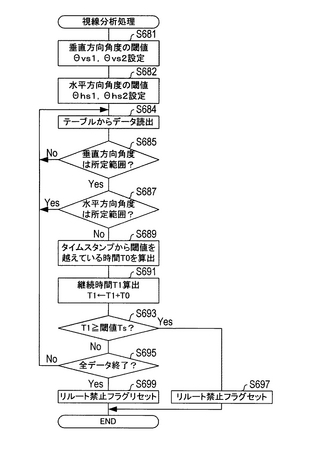
また、車両が第二地点を通過したと判断すると(S675でYes)、CPU21は、図9に示す視線分析処理を実行する(S680)。図9は、CPU21が実行する視線分析処理を表すフローチャートである。視線分析処理を実行すると、CPU21は、リルート禁止フラグをセット・リセットする際の判断に用いる運転者の垂直方向の視線の向きを表す角度Θvの閾値Θvs1,Θvs2を設定する。尚、図10は、閾値Θvs1,Θvs2及び閾値Θhs1,Θhs2を表す説明図である。この閾値Θvs1,Θvs2は、フロントガラスを介して運転者が外界を視認できる範囲に基づいて決定される。
【0065】
例えば、閾値Θvs1としては、運転者がフロントガラスを通じて運転席から視認することができる外界の下縁に視線を向けた場合に、視線検出装置39から得られる垂直方向の角度Θvを設定することができる。また、閾値Θvs2としては、運転者がフロントガラスを通じて運転席から視認することができる外界の上縁に視線を向けた場合に、視線検出装置39から得られる垂直方向の角度Θvを設定することができる。
【0066】
この処理は、予め試験により、運転者がフロントガラスを通じて運転席から視認することができる外界の下縁に視線を向けた場合の角度Θvと、運転者がフロントガラスを通じて運転席から視認することができる外界の上縁に視線を向けた場合の角度Θvとを得て、これを図示しないEEPROM等に記憶させておき、この記憶値をEEPROMから読み出して、閾値Θvs1,Θvs2に設定することにより、実現することが可能である。S681での処理を終えると、CPU21は、続くS682にて、リルート禁止フラグをセット・リセットする際の判断に用いる運転者の水平方向の視線の向きを表す角度Θhの閾値Θhs1,Θhs2を設定する。
【0067】
具体的に、CPU21は、誘導経路が上記判定対象の分岐点において左折するものである場合、図10(b)に示すように、閾値Θhs1を値(ΘHS−ΔΘh1)に設定し(Θhs1=ΘHS−ΔΘh1)、閾値Θhs2を180°に設定する(Θhs2=180°)。尚、角度ΘHSは、運転者の視線を向きを評価するための基準線LNの水平方向の角度であり、例えば、運転者が車両を直進させている場合に、最も頻度の高い視線の向きを表す水平方向の角度Θhを、角度ΘHSとすることができる。その他、角度ΘHS=90°としてもよい。その他、角度ΔΘh1は、基準線LNからの視線のずれを表すものである。
【0068】
本実施例では、運転者の視線の向きが基準線LNより水平方向左側に角度ΔΘh1以下であると、上記判定対象の分岐点より左に延びる誘導経路側に運転者の視線が移動していないと評価する。このため、角度ΔΘh1としては、予め試験等により、上記判定対象の分岐点より左に延びる誘導経路側に運転者の視線が移動していないと評価することが適切な基準線LNからの水平方向の角度の限界値が設定される。尚、値(ΘHS−ΔΘh1)は、試験結果に基づき、予めEEPROM等に記憶させておけばよく、S682では、EEPROMの記憶値を、閾値Θhs1に設定すればよい。
【0069】
一方、誘導経路が上記判定対象の分岐点において右折するものである場合、CPU21は、図10(c)に示すように、閾値Θhs1を0°に設定し(Θhs1=0°)、閾値Θhs2を値(ΘHS+ΔΘh2)に設定する(Θhs2=ΘHS+ΔΘh2)。尚、角度ΔΘh2は、基準線LNからの視線のずれを表すものである。本実施例では、運転者の視線の向きが基準線LNより水平方向右側に角度ΔΘh2以下であると、上記判定対象の分岐点より右に延びる誘導経路側に運転者の視線が移動していないと評価する。
【0070】
このため、角度ΔΘh2としては、予め試験等により、上記判定対象の分岐点より右に延びる誘導経路側に運転者の視線が移動していないと評価することが適切な基準線LNからの水平方向の角度の限界値が設定される。尚、値(ΘHS+ΔΘh2)は、予めEEPROM等に記憶させておけばよく、S682では、EEPROMの記憶値を、閾値Θhs2に設定すればよい。
【0071】
S682での処理を終えると、CPU21は、車両が上記第一地点を通過してから第二地点を通過するまでの間に視線検出装置39から取得した視線検出結果であって、S685での判断対象となっていない視線検出結果のうち、タイムスタンプの時刻Tが最も古いものを、上述の検査結果履歴テーブルから読み出す(S684)。
【0072】
そして、読み出した視線検出結果が示す垂直方向の角度Θvが、値Θvs1からΘvs2までの範囲内に収まっているか否かを判断する(S685)。即ち、S685では、S684で読み出した視線検出結果が示す垂直方向の角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値であるか否かを判断する。
【0073】
ここで、角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値ではないと判断すると(S685でNo)、CPU21は、S684に移行して、未処理の視線検出結果の内、時刻Tの最も古いものを検査結果履歴テーブルから読み出し、その視線検出結果が示す垂直方向の角度Θvが、値Θvs1からΘvs2までの範囲内に収まっているか否かを判断する(S685)。
【0074】
S684で読み出した視線検出結果が示す垂直方向の角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値であると判断すると(S685でYes)、CPU21は、続くS687にて、S684で読み出した視線検出結果が示す水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっているか否かを判断する。即ち、S687では、S684で読み出した視線検出結果が示す水平方向の角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足する値であるか否か判断する。
【0075】
そして、水平方向の角度Θhが関係式Θhs1≦Θh≦Θhs2を満足する値であると判断すると(S687でYes)、S684に移行し、未処理の視線検出結果の内、時刻Tの最も古いものを検査結果履歴テーブルから読み出し、その視線検出結果が示す角度Θvが、値Θvs1からΘvs2までの範囲内に収まっているか否かを判断する。
【0076】
一方、水平方向の角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足しない値であると判断すると(S687でNo)、CPU21は、タイムスタンプが示す時刻Tから、水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0を算出する(S689)。
【0077】
具体的に、ここでは、運転者の水平方向の視線の向きを表す角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足しない値であると判断された視線検出結果のタイムスタンプが時刻T[n]を表している場合、この視線検出の前の回に検出された視線検出結果のタイムスタンプが表す時刻T[n−1]を用いて、値(T[n]−T[n−1])を、運転者の水平方向の視線の向きを表す角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0として算出する。但し、S684で読み出した視線検出結果が、第一地点の通過後、最初に検出した視線の検出結果である場合(即ち、n=1である場合)には、上述の方法で時刻T0を算出することができないので、時刻T0=0に設定する。
【0078】
S689での処理を終えると、CPU21は、S691に移行して、検出された水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0の総計T1を算出する。具体的には、変数T1の初期値を0とし、この変数T1にS689で求めた時間T0を加算することで、運転者の水平方向の視線の向きを表す角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0の総計T1を算出する。
【0079】
この後、CPU21は、総計T1が、予め定められた閾値Ts以上であるか否か判断し(S693)、総計T1が閾値Ts未満であると判断すると(S693でNo)、検査結果履歴テーブルに記載の各時刻毎の視線検出結果の全てについて、S685での判断が終了したか否かを判断する(S695)。
【0080】
そして、終了していないと判断すると(S695でNo)、検査結果履歴テーブルから次の視線検出結果を読み出し、その垂直方向の角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値であって、水平方向の角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足しない値である場合には、その視線検出結果のタイムスタンプが示す時刻T[n]と、この視線検出の前の回に検出された視線検出結果のタイムスタンプが示す時刻T[n−1]を用いて、水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0=T[n]−T[n−1]を算出し(S689)、総計T1を更新する(S691)。
【0081】
このような処理を繰返し行った結果、総計T1が閾値Ts以上となると、CPU21は、S693でYesと判断してS697に移行し、リルート禁止フラグをセットして、S700に移行する。一方、上述の処理を全視線検出結果について繰返し行っても、総計T1が閾値Ts未満であると、CPU21は、全視線検出結果についての処理が終了した時点で(S695でYes)、S699に移行し、リルート禁止フラグをリセットした状態で、当該視線分析処理を終了する。その後、S700に移行する。
【0082】
S700に処理を移行すると、CPU21は、リルート禁止フラグの状態を判別することにより、リルートを実行してもよいか否かを判断する。ここで、リルート禁止フラグがセットされていると、CPU21はNoと判断して、リルート(S800での処理)を実行せずに当該拡張リルート制御処理を一旦終了する。
【0083】
一方、CPU21は、リルート禁止フラグがリセットされていると判断すると、S700でYesと判断してS800に移行し、経路探索部27に探索条件を設定して、その条件で、車両の現在位置から目的地までの最適な経路を探索させ、それを誘導経路に設定させる。その後、当該拡張リルート制御処理を一旦終了する。
【0084】
具体的に、S700でYesと判断された場合には、車両が第一地点を通過してから第二地点を通過するまでの期間に、運転者の視線が所定時間Ts以上、車両の前後方向に延びる基準線LNから、上記判定対象の分岐点より先の誘導経路側に所定角度ΔΘh1又はΔΘh2より大きく向いていないので、運転者が旋回地点で誘導経路に沿って車両を走行させないと予測される。従って、S800では、現在設定されている誘導経路が上記判定対象の分岐点で示す誘導方向とは異なる方向に車両を誘導可能な経路を、経路探索部27に探索させる。
【0085】
図5(b)は、拡張リルート制御処理のS800で実行される処理内容の例を示したフローチャートである。図5(b)に示す処理では、まず、上記判定対象の分岐点(ノード)に接続されているリンクを道路地図情報に基づいて把握し(S810)、分岐点に接続されているリンクのうち、現在設定されている誘導経路が含むリンク以外のリンクであって、当該車両が進入可能なリンクを経路の探索対象に選択する(S820)。尚、現在設定されている誘導経路が含むリンクとは、上記判定対象の分岐点より車両側であって現在車両が走行中のリンク、及び、誘導経路が示す上記判定対象の分岐点より先のリンクのことである。
【0086】
そして、上記選択したリンクの夫々について、そのリンクを含む現在位置から目的地までの最適な経路を経路探索部27に探索させ(S830)、上記選択した各リンクを含む経路のうち、最適な経路を誘導経路に設定させる(S840)。尚、S840では、例えば、車両が上記判定対象の分岐点で直進する方向の経路を、誘導経路として優先的に選択させるようにすることができる。また、S800の処理では、進路前方の上記判定対象の分岐点までの誘導経路が基本的に変更されないので、車両の現在位置から進路前方の上記判定対象の分岐点までの誘導経路を変更しないことを前提として、上記判定対象の分岐点から目的地までの経路を経路探索部27に探索させてもよい。
【0087】
以上、本実施例のナビゲーション装置1について説明したが、このナビゲーション装置1では、経路探索部27により設定された誘導経路が車両の進路前方に位置する分岐点において車両の旋回を伴う経路である場合に、CPU21が、位置確定部25から得た車両の現在位置を表す情報に基づき、車両の進路前方に位置する上記旋回を伴う最寄の分岐点より車両側に所定距離X1手前の第一地点を、車両が通過したか否か判断する(S615)。
【0088】
そして、車両が第一地点を通過してから、上記分岐点と第一地点との間に位置する第二地点を通過するまでの期間に、車両の運転者が向けた視線の向きを表す視線検出結果を、視線検出装置から取得する(S650)。また、取得した視線検出結果に基づいて、視線分析処理(S680)により、運転者が上記旋回を伴う最寄(次)の分岐点で誘導経路に沿って車両を走行させるか否かを予測する。
【0089】
ここで、CPU21は、車両が第一地点を通過してから第二地点を通過するまでの期間に、運転者の視線が、所定時間Ts以上、車両の前後方向に延びる基準線LNから上記分岐点より先の誘導経路側に、水平方向に沿って所定角度ΔΘh1,ΔΘh2より大きく向いたか否か判断する(S684〜S695)。
【0090】
そして、運転者の視線が、時間Ts以上、基準線LNから上記誘導経路側に角度ΔΘh1,ΔΘh2より大きく向いていないと判断すると、運転者が上記分岐点で誘導経路に沿って車両を走行させないと予測し(S699)、現在設定されている誘導経路が上記分岐点にて示す誘導方向とは異なる方向に車両を誘導可能な経路を探索して、それを誘導経路に設定する(S800)。一方で、運転者の視線が、時間Ts以上、基準線LNから上記誘導経路側に角度ΔΘh1,ΔΘh2より大きく向いている場合には、運転者が上記分岐点で誘導経路に沿って車両を走行させると予測し、リルート禁止フラグをセットして(S697)、S800でのリルートを禁止する。
【0091】
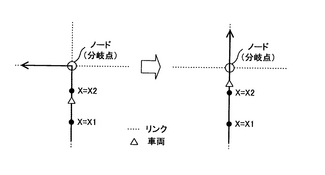
即ち、このナビゲーション装置1では、図11左図のように、誘導経路が車両前方の分岐点で左方向への旋回を伴う経路である場合に、運転者の視線が誘導方向(左方向)を向いておらず運転者が旋回の意思を見せていないと、S800の処理にて、現在の誘導方向(左方向)とは別の方向(直進方向又は右方向)に車両を誘導する誘導経路が分岐点通過前に設定され、運転者に案内される(図11右図参照)。その一方で、運転者の視線が誘導方向(左方向)を向いており運転者が誘導方向への旋回の意思を見せている場合には、S800の処理が実行されず、引き続き同じ誘導経路(図11左図)が案内される。
【0092】
従って、このナビゲーション装置1によれば、運転者が誘導経路とは異なる経路に車両を走行させる場合に、従来装置よりも早く適切に経路の再探索を実行することができ、適切な経路案内を実行することができる。例えば、運転者が案内内容を正しく理解しておらず、右左折を案内する分岐点で直進してしまう場合でも、分岐点通過前に直ちに誘導経路を修正し、その誘導経路を運転者に案内することができる。また、上記方法を用いて運転者の行動を予測すれば、右左折位置・安全確認のための視認行動とは関係なく向けた視線により、誤った予測結果を導いてしまうのを抑えることができ、簡単な演算処理で運転者が誘導経路に沿って車両を走行させるか否かを正確に予測することができる。
【0093】
また、本実施例のナビゲーション装置1では、CPU21が、車両の走行速度を表す速度情報として、距離センサから出力信号を取得し(S620)、この出力信号に基づき、車両の走行速度Vを把握する。そして、この情報に基づき、車両の走行速度が予め定められた所定速度Vs未満であるか否かを判断し(S630)、車両の走行速度Vが所定速度Vs未満である場合には、リルートを禁止する(S640)。
【0094】
従って、このナビゲーション装置1によれば、車両の走行速度が遅く、運転者の視線が信号機側を向いている可能性が高い場合に、誤った予測でリルートを実行することがなく利用者にとって好ましくない時期に誘導経路の変更が行われてしまうのを防止することができる。
【0095】
その他、本実施例のナビゲーション装置1では、CPU21が、遮蔽物情報に基づいて、車両の進路前方に位置する上記分岐点付近に、その分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断し(S400〜S500)、この分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断される場合には、S600〜S800の処理をスキップすることにより、リルートを禁止する。
【0096】
分岐点付近に、分岐点より先の誘導経路の視認を妨げるような建造物があると、運転者の視線が誘導経路側に向きにくく、誤った予測結果を導いてしまう可能性あるが、このナビゲーション装置1によれば、運転者から分岐点より先の誘導経路を視認することができない可能性がある場合に、S800での処理を実行しないので、利用者にとって好ましくない時期に誘導経路の変更が実行されてしまうのを防止することができる。
【0097】
尚、本発明の通過判断手段は、CPU21が実行するS615にて実現されており、視線情報取得手段は、S650にて実現されている。その他、予測判定手段は、視線分析処理(S680)にて実現されており、リルート手段は、S800にて実現されている。
【0098】
その他、本発明の速度情報取得手段は、CPU21が実行するS620にて実現され、速度判断手段はS630にて実現され、速度依存型禁止手段はS640にて実現されている。また、遮蔽物判断手段は、CPU21が実行するS400〜S500にて実現され、遮蔽物依存型禁止手段は、S800の処理を実行せずに当該拡張リルート制御処理を一旦終了する処理にて実現されている。
【0099】
また、本発明の経路案内装置は、上記実施例に限定されるものではなく、種々の態様を採ることができる。例えば、上記実施例のナビゲーション装置1には、値Θvs1,Θvs2,ΘHS,ΔΘh1,ΔΘh2,Ts,Vsを学習更新するための機能を設けてもよい。学習更新機能を設ければ、より好適なタイミングでリルートを実行することができる。
【図面の簡単な説明】
【0100】
【図1】本実施例のカーナビゲーション装置1の構成を表すブロック図である。
【図2】遮蔽物情報の構成を表す説明図である。
【図3】視線検出装置39により検出される角度Θh及びΘvを表す説明図である。
【図4】制御回路20にて実現される機能の一部を表した機能ブロック図である。
【図5】CPU21が繰返し実行する拡張リルート制御処理を表すフローチャート(a)及びS800で実行される処理内容の具体例を示したフローチャート(b)である。
【図6】CPU21が実行する遮蔽物判定前処理を表すフローチャートである。
【図7】CPU21が実行する視線・速度監視処理を表すフローチャートである。
【図8】検出結果履歴テーブルの構成を表す説明図である。
【図9】CPU21が実行する視線分析処理を表すフローチャートである。
【図10】閾値Θvs1,Θvs2,Θhs1,Θhs2を表す説明図である。
【図11】拡張リルート制御処理による誘導経路の変更態様を示した説明図である。
【符号の説明】
【0101】
1…ナビゲーション装置、10…位置検出装置、11…GPS受信機、13…ジャイロスコープ、15…距離センサ、17…地磁気センサ、20…制御回路、21…CPU、22…ROM、23…RAM、25…位置確定部、26…インタフェース部、27…経路探索部、28…経路案内部、29…リルート制御部、31…地図データ入力器、33…表示装置、35…外部情報入出力装置、36…操作スイッチ群、37a…リモコン、37b…リモコンセンサ、38…音声出力装置、39…視線検出装置
【技術分野】
【0001】
本発明は、現在地から目的地までの経路を案内する経路案内装置に関する。
【背景技術】
【0002】
従来より、経路案内装置としては、利用者の操作により入力装置から目的地の指定情報が入力されると、現在地から目的地までの最適な経路を探索し、これを誘導経路に設定して、運転者が経路に沿って車両を走行させることができるように案内するカーナビゲーション装置が知られている。
【0003】
また、経路の案内方法としては、設定した誘導経路を、道路地図情報と共に、液晶ディスプレイ等の表示装置に表示させる方法や、交差点等の分岐点で旋回方向を音声案内する方法が知られている。但し、道路地図情報と共に誘導経路を表示装置に表示させて、交差点等で旋回方向を案内する程度であると、運転者が旋回地点を錯誤することが多いため、近年では、交差点周囲の景色を三次元でアニメーション表示するなどして、旋回地点を運転者が錯誤しないようにしている。
【0004】
また、近年では、運転者の視線を検出し、この検出結果に基づいて、経路誘導に対する運転者の視認行動が正しいか否かを判断し、正しくない場合には、運転者を視認誘導して、正しい方向に車両を導く方法が発明されている(例えば、特許文献1〜3参照)。
【特許文献1】特開2004−037149号公報
【特許文献2】特開2004−037150号公報
【特許文献3】特開2004−053541号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したような様々な案内を行っても、運転者は、誘導経路とは異なる経路に、車両を走行させることがある。典型的な例としては、運転者が案内の内容を錯誤して、誘導経路とは異なる経路に、車両を走行させてしまう場合である。また、誘導経路に渋滞が発生していると、運転者は、渋滞を回避するために、意識的に誘導経路とは異なる経路に車両を走行させることがある。また、走行レーンの変更ができずに、旋回(右左折)を案内する分岐点で、車両を直進させる場合がある。
【0006】
このため、カーナビゲーション装置には、車両が誘導経路から一定距離又は一定時間以上外れると、現在の車両位置から目的地までの経路を再探索するリルート機能が設けられていることが多い。
【0007】
しかしながら、従来装置では、車両が誘導経路から一定距離又は一定時間以上外れないと、経路の再探索が行われないため、誘導経路を外れてから所定期間は、適切な経路案内をすることができないといった問題があった。また、再探索後の経路が、ただちに車両の旋回(右左折)を伴うものである場合には、走行レーン等の関係から、その経路に沿って車両を走行させることができず、運転者に不満が及ぶ可能性があった。
【0008】
本発明は、こうした問題に鑑みなされたものであり、経路の再探索を、早い時期に適切に実行することが可能な経路案内装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するためになされた本発明の経路案内装置では、地図情報取得手段が道路地図情報を取得し、位置情報取得手段が車両の現在位置を表す位置情報を取得する。例えば、地図情報取得手段は、道路地図情報を記憶する装置から道路地図情報を取得し、位置情報取得手段は、車両の現在位置を検出する位置検出装置から車両の現在位置を表す位置情報を取得する。また、この経路案内装置では、経路探索手段が、上記取得した道路地図情報及び位置情報に基づいて、車両の現在位置から予め設定された目的地までの経路を探索し、誘導経路を設定する。
【0010】
この経路案内装置は、車両の運転者が向けた視線の向きを表す情報を、運転者の視線の向きを検出する視線検出装置から取得する視線情報取得手段と、上記誘導経路における車両の進路前方に位置する分岐点の一つを、所定の規則に従って選択し、選択した分岐点を基準分岐点として、この基準分岐点より車両側に所定距離手前の地点を車両が通過したか否かを、上記位置情報に基づき判断する通過判断手段と、を備え、この通過判断手段により車両が上記所定距離手前の地点を通過したと判断されると、上記視線情報取得手段が取得する視線の向きを表す情報に基づき、予測判定手段が、上記基準分岐点にて、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する。
【0011】
予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測されると、経路案内装置は、リルート手段にて、経路探索手段に経路の再探索を実行させる。具体的には、基準分岐点から予め設定された目的地までの経路を探索させる。
【0012】
このように、本発明の経路案内装置では、運転者の視線の向きに基づいて、車両の進路前方に位置する分岐点(交差点等)で運転者が誘導経路に沿って車両を走行させるか否かを予測し、運転者が誘導経路に沿って車両を走行させないと予測される場合には、経路の再探索(リルート)を実行するので、運転者が誘導経路とは異なる経路に車両を走行させる場合に、従来装置よりも早く適切に経路の再探索を実行することができる。尚、本発明の経路案内装置は、請求項2記載のように構成されてもよい。
【0013】
請求項2記載の経路案内装置では、上記位置情報取得手段が取得した位置情報に基づき、通過判断手段が、上記経路探索手段により設定された誘導経路における車両の旋回を伴う分岐点であって、車両の進路前方に位置する次(最寄)の分岐点を基準分岐点として選択し、この基準分岐点より車両側に所定距離手前の地点を車両が通過したか否かを判断する。また、この通過判断手段により、車両が上記所定距離手前の地点を通過したと判断されると、視線情報取得手段が運転者の視線の向きを検出する視線検出装置から取得した上記視線の向きを表す情報に基づいて、予測判定手段が、上記基準分岐点において、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する。
【0014】
また、リルート手段は、予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測判定されると、経路探索手段に、車両の現在位置から予め設定された目的地までの経路であって、現在設定されている誘導経路が上記基準分岐点において示す誘導方向とは異なる方向に車両を誘導可能な経路を探索させる。
【0015】
この経路案内装置によれば、運転者が誘導経路とは異なる経路に車両を走行させる場合に、従来装置よりも早く適切に経路の再探索を実行することができ、例えば、運転者が案内を正しく理解しておらず、右左折を案内する分岐点(交差点等)で直進してしまう場合でも、分岐点通過前に直ちに誘導経路を修正し、その誘導経路を運転者に案内することができる。
【0016】
尚、右左折を案内する分岐点で車両が直進してしまう事象に限定して、本発明を適用する場合には、車両の現在位置から予め設定された目的地までの経路であって、上記基準分岐点で車両が直進する場合に通過する道路を含む目的地までの経路を経路探索手段に探索させ、これを誘導経路に設定するようにリルート手段を構成するとよい。このようにリルート手段を構成すると、右左折を案内する分岐点で車両が直進してしまう場合であっても、分岐点通過直後から適切に経路案内をすることができる。即ち、再探索後の経路が、分岐点通過後ただちに車両の旋回(右左折)を伴うものであっても、それを早い時期に適切に案内することができる。
【0017】
また、予測判定手段は、請求項3記載のように構成されるとよい。請求項3記載の経路案内装置における予測判定手段は、視線情報取得手段が取得した上記視線の向きを表す情報に基づき、運転者の視線が、車両の前後方向に延びる基準線から、上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを、視線判断手段にて判断し、視線判断手段により、運転者の視線が、基準線から上記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測する。
【0018】
運転者の視線が、車両の進路前方に位置する上記分岐点より先の誘導経路側(具体的に、誘導経路が分岐点で左折(右折)するものである場合には、基準線より左側(右側))に所定角度以上向く場合には、運転者が誘導経路に沿って車両を走行させる可能性が高いということができるので、この経路案内装置によれば、簡単な演算処理で運転者が旋回地点で誘導経路に沿って車両を走行させるか否かを正確に予測することができる。
【0019】
尚、上記基準線は、車両の前後方向に対して平行に延びる線の他、その線から車両の左右方向に所定角度傾いた線も含むものとする。例えば、上記基準線は、運転者が車両を直進させる場合に最も頻度の高い視線の方向に設定されるとよい。また、上記所定角度としては、試験により予め定められたものを用いてもよいし、車両位置と分岐点との位置関係から算出したものを用いてもよい。また、上記所定角度は、分岐点の種類に関係なく固定値にされてもよいし、分岐点の種類毎に設定されてもよい。
【0020】
また、上記予測判定手段は、請求項4記載のように構成されるとよい。請求項4記載の経路案内装置における予測判定手段は、視線情報取得手段が取得した上記視線の向きを表す情報に基づき、運転者の視線が、所定時間以上、車両の前後方向に延びる基準線から、上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを、視線判断手段により判断し、視線判断手段により、運転者の視線が、所定時間以上、基準線から上記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測する。
【0021】
請求項4記載の経路案内装置によれば、運転者の視線が、所定期間に、所定時間以上、上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断することにより、運転者が旋回地点で誘導経路に沿って車両を走行させるか否かを予測するので、右左折前の視認行動(右左折位置確認・安全確認のための視認行動)とは関係なく向けた視線により、誤った予測結果を導いてしまうのを抑えることができる。
【0022】
また、上記経路案内装置における視線情報取得手段は、請求項5記載のように構成されるとよい。請求項5記載の経路案内装置における視線情報取得手段は、通過判断手段により、車両が上記所定距離手前の地点としての第一の地点を通過したと判断されてから、上記基準分岐点と第一の地点との間に位置する第二の地点を、車両が通過するまでの期間に、車両の運転者が向けた視線の向きを表す情報を、視線検出装置から取得する。
【0023】
この経路案内装置によれば、第一の地点から第二の地点までの期間の運転者の視認行動に基づいて、上記予測判定を行うので、瞬間的な運転者の視認行動に基づいて上記予測判定を行うよりも、高精度に上記予測判定を行うことができる。
【0024】
尚具体的に、視線判断手段は、車両が第一の地点を通過してから第二の地点を通過するまでの期間に、運転者の視線が、継続して所定時間以上、基準線から上記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断する構成にされてもよいし、上記期間において運転者の視線が基準線から上記基準分岐点より先の誘導経路側に所定角度以上向いた時間の総計が、所定時間以上であるか否かを判断する構成にされてもよい。
【0025】
また、分岐点に設置された信号機が「黄」「赤」の場合には、運転者の視線が誘導経路側よりも信号機側を向く可能性が高くなり、予測判定手段による予測結果の信頼性が低下する可能性があるから、このような場合には、経路の再探索が行われないように経路案内装置を構成するとよい。
【0026】
請求項6記載の経路案内装置は、車両の走行速度を検出する速度検出装置から、車両の走行速度を表す速度情報を取得する速度情報取得手段を備え、速度情報取得手段が取得した速度情報に基づき、速度判断手段にて、車両の走行速度が予め定められた所定速度未満であるか否かを判断し、速度判断手段により車両の走行速度が上記所定速度未満であると判断されると、速度依存型禁止手段により、リルート手段の動作を禁止する。
【0027】
この経路案内装置によれば、車両の走行速度が遅く、運転者の視線が信号機側を向いている可能性が高い場合に、リルート手段が動作しないので、誤った予測により不適切に誘導経路の変更が行われてしまうのを防止することができる。
【0028】
また、分岐点付近に、分岐点より先の誘導経路の視認を妨げるような建造物があると、運転者の視線が誘導経路側に向きにくいので、各分岐点毎に、その分岐点付近に運転者の視界から分岐点より先の道路を遮蔽する可能性のある建造物が存在するか否かを表す遮蔽物情報を、道路地図情報に付し、経路案内装置を請求項7記載のように構成するとよい。
【0029】
請求項7記載の経路案内装置は、上記遮蔽物情報に基づいて、通過判断手段による通過判断の基準にされた車両の進路前方に位置する上記基準分岐点付近に、上記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断する遮蔽物判断手段を備え、この遮蔽物判断手段により、上記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断されると、遮蔽物依存型禁止手段にて、リルート手段の動作を禁止する。
【0030】
この経路案内装置によれば、運転者から基準分岐点より先の誘導経路を視認することができない可能性がある場合に、リルート手段を動作させないので、誤った予測により不適切に誘導経路の変更が行われてしまうのを防止することができる。
【0031】
尚、上記遮蔽物情報は、例えば、分岐点を基準とした各方角毎に、運転者の視界から分岐点より先の道路を遮蔽する可能性のある建造物が存在するか否かを表すフラグ情報を備える構成とすることができる。
【0032】
また、請求項1〜7記載の経路案内装置は、上記各手段としての機能をコンピュータに実現させるためのプログラムを、コンピュータに実行させることにより構成されてもよい。また、このプログラムは、フレキシブルディスク、光磁気ディスク、CD−ROM、ハードディスク、ROM等のコンピュータ読み取り可能な記録媒体に記録された状態で、提供されてもよいし、ネットワークを通じて提供されてもよい。
【発明を実施するための最良の形態】
【0033】
以下、本発明の実施例について図面と共に説明する。図1は、本発明が適用されたカーナビゲーション装置1の構成を表すブロック図である。
本実施例のナビゲーション装置1は、主に、車両の現在位置及び進行方位等を検出する位置検出装置10と、道路地図情報を含む地図データが記録された記憶媒体(CD−ROM、DVD、ハードディスク等)から地図データ等を読み出し、これを制御回路20に入力する地図データ入力器31と、表示装置33と、外部情報入出力装置35と、利用者の操作情報を制御回路20に入力するための操作スイッチ群36と、操作スイッチ群36と同様に利用者の操作情報を制御回路20に入力するためのリモートコントロール端末(以下、リモコンと称す。)37aと、リモコン37aから受信した信号を制御回路20に入力するリモコンセンサ37bと、音声出力装置38と、運転者の視線の向きを検出する視線検出装置39と、装置内各部を統括制御する制御回路20と、を備える。
【0034】
位置検出装置10は、GPS(Global Positioning System)用の人工衛星から送信されてくる電波をGPSアンテナを介して受信し、車両の現在位置等を検出するGPS受信機11と、車両に加えられる回転運動(車両の旋回運動)の大きさを検出するジャイロスコープ13と、車両の単位時間当たりの走行距離を計測する距離センサ15と、地磁気から進行方位を検出する地磁気センサ17とを備える。制御回路20は、互いに性質の異なる誤差を有するこれら各センサ等11〜17の出力信号を、補完しながら使用して、車両の現在位置及び進行方位を確定する構成にされている。尚、図1に示した位置検出装置10の構成は一例であって、位置検出装置10は、上述したうちの一部のセンサで構成されたものであってもよいし、ステアリングの回転センサや各転動輪の車輪センサ、傾斜角センサ等が更に付加されたものであってもよい。
【0035】
一方、地図データ入力器31は、道路地図情報を含む上記地図データや、建造物等に関するデータ、位置検出の精度向上のためのマップマッチング用データ等の各種データを、記録媒体から読み出し、制御回路20に入力する構成にされている。
【0036】
地図データに含まれる道路地図情報は、分岐点等の複数のノード間をリンクにより接続して道路地図を形成するものであって、各リンクに対し、リンクの識別番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端の位置座標、リンクの道路幅及び道路種別等のデータからなるリンク情報を備える。また、この道路地図情報は、各ノードに対し、ノードの識別番号(ノードID)、ノードの位置座標、ノード種別(分岐点に関する情報、信号機の有無を表す情報)等のデータからなるノード情報を備える。
【0037】
その他、この道路地図情報は、分岐点を表す各ノード毎に図2に示す構成の遮蔽物情報を備える。図2は、遮蔽物情報の構成を表す説明図である。
遮蔽物情報は、自身に関連付けられたノードの付近に、運転者の視界からそのノード(分岐点)より先の道路を遮蔽する可能性のある建造物(以下、これを「遮蔽物」と表現する。)が存在するか否かを表すフラグ情報を、各方角毎に備える。具体的に、本実施例の遮蔽物情報は、分岐点を表すノードIDに関連付けられて、北西・北東・南西・南東の計4つの方角毎に、遮蔽物が有ることを示す値「1」又は遮蔽物が無いことを示す値「0」の二値で表されたフラグ情報を備える。尚、フラグ情報は、車両を走行させて、試験的にデータを収集し、これを解析することで作成することができる。
【0038】
また、表示装置33は、液晶ディスプレイ等からなるカラー表示装置であり、その表示画面には、地図画面として、車両の現在位置を表すマーク、地図データ入力器31より入力される地図データ、誘導経路などが重ねて表示される。外部情報入出力装置35は、外部、例えばVICS(Vehicle Information and Communication System)などのインフラから提供される情報を受信すると共に、外部へ各種情報を送信するための装置であり、この外部情報入出力装置35が外部から受信した情報は、制御回路20にて処理される。
【0039】
その他、視線検出装置39は、頭部の運動に左右されず運転者の視線を検出することが可能な非接触式の視線検出装置であり、ダッシュボード等、運転者の目を撮影可能な位置に設置される。具体的に、本実施例の視線検出装置39は、図3,図4に示すように、運転者の視線についての検出結果として、車両の左側を0度、右側を180度とした運転者の視線の水平方向の角度Θhと、車両の下方を0度、上方を180度とした運転者の視線の垂直方向の角度Θvと、それら角度Θh及びΘvを検出した時刻Tと、を出力し、これを制御回路20に入力する。尚、図3は、視線検出装置39により検出される角度Θh及びΘvを表す説明図であり、図4は、制御回路20にて実現される機能の一部を表した機能ブロック図である。
【0040】
制御回路20は、各種演算処理を行うためのCPU21と、CPU21により実行される各種プログラムを記憶するROM22と、CPU21によるプログラムの実行時に、作業用メモリとして使用されるRAM23と、を備え、これらを用いて、装置内各部を統括制御し、経路探索・案内等の各種機能を実現する。
【0041】
例えば、制御回路20は、ROM22に記憶されたプログラムをCPU21に実行させることにより、位置確定部25として機能し、センサ等11〜17の出力信号を、車両の位置情報として位置検出装置10から取得し、これらの情報に基づき車両の現在位置及び進行方位を確定する。
【0042】
また、制御回路20は、ROM22に記憶されたプログラムをCPU21に実行させることにより、インタフェース部26として機能し、選択画面の表示等、表示装置33を通じて利用者とのインタフェースを提供する。
【0043】
インタフェース部26は、リモコン37aを介してリモコンセンサ37bから、あるいは操作スイッチ群36から、目的地の指定情報が入力されると、CPU21にROM22に記憶された経路探索用のプログラムを実行させる。これにより、制御回路20は、経路探索部27として機能する。
【0044】
経路探索部27は、位置確定部25から車両の現在位置を表す情報を取得すると共に、地図データ入力器31を制御して、地図データ入力器31から道路地図情報を取得し、これら車両の現在位置を表す情報及び道路地図情報に基づき、ダイクストラ法等の周知の経路探索方法を用いて、位置確定部25が確定した車両の現在位置から指定された目的地までの最適な経路を探索し、それを誘導経路に設定する。
【0045】
また、制御回路20のCPU21は、誘導経路が設定されている場合、経路案内用のプログラムを実行することにより、経路案内部28として機能する。経路案内部28は、位置確定部25にて確定された車両の現在位置を表す情報に基づき、車両の走行路を理解し、経路探索部27にて設定された誘導経路に沿って、運転者が車両を走行させることができるように、適宜、音声出力装置38に、経路案内用の音声信号を入力して、音声出力装置38に経路を音声案内させる。
【0046】
また、制御回路20は、ROM22に記憶されたプログラムをCPU21に実行させることにより、車両が誘導経路に沿って走行しない場合のリルート機能を実現する。
上記プログラムにより制御回路20で実現されるリルート制御部29は、車両が誘導経路から一定距離又は一定時間以上外れると、経路探索部27に、現在の車両位置から目的地までの経路を再探索させ、誘導経路を再設定させる。また、図5(a)に示す拡張リルート制御処理を、所定条件が満足される度(例えば車両が分岐点を通過する度)に実行して、本発明に係る機能を実現する。尚、図5(a)は、CPU21が繰返し実行する拡張リルート制御処理を表すフローチャートである。
【0047】
拡張リルート制御処理を実行すると、CPU21は、位置確定部25から車両の現在位置及び進行方位を表す情報を取得し(S100)、この情報に基づき現在位置から先の誘導経路、即ち車両の進路前方の誘導経路を解析して(S200)、誘導経路が、車両の現在位置から進路前方の所定距離以内に、旋回(右左折)を伴う分岐点を含むものであるか否か判断する(S300)。
【0048】
ここで、誘導経路が、車両の現在位置から進路前方の所定距離以内に、旋回(右左折)を伴う分岐点を含むものではないと判断すると(S300でNo)、CPU21は、S100に移行して、現在位置から車両の進路前方の所定距離以内に、旋回(右左折)を伴う分岐点が現れるまで、上述の処理を繰り返す。そして、誘導経路が、車両の現在位置から進路前方の所定距離以内に、旋回(右左折)を伴う分岐点を含むものであると判断すると(S300でYes)、CPU21は、車両の進路前方の所定距離内に存在する分岐点であって、旋回(右左折)を伴う最寄の分岐点を、遮蔽物の判定対象に設定し、S400にて、図6に示す遮蔽物判定前処理を実行する。尚、図6は、CPU21が実行する遮蔽物判定前処理を表すフローチャートである。
【0049】
遮蔽物判定前処理を実行すると、CPU21は、S100での取得情報に基づき、車両の進行方位が東であるか否か判断する(S410)。そして、進行方位が東であると判断すると(S410でYes)、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別する(S420)。ここで、右折するものであると判断すると、CPU21は、S423にて、上記判定対象の分岐点のノードIDに関連付けられた遮蔽物情報を地図データ入力器31から取得し、この遮蔽物情報から南西のフラグ情報を取得する。一方、S420で誘導経路が上記判定対象の分岐点で左折するものであると判断すると、S427にて、上述と同様の方法で、上記判定対象の分岐点に対応する遮蔽物情報から北西のフラグ情報を取得する。
【0050】
尚、このように車両の進行方位が東である場合に、南西又は北西のフラグ情報を取得するのは、車両が分岐点の西から東方向に進んでいる場合には、分岐点より南西又は北西に存在する遮蔽物によって、分岐点から南北に延びる道路が運転者の視線から遮蔽されてしまう可能性があるためである。このようにして、S423又はS427でフラグ情報を読み出した後には、S500に処理を移行する。
【0051】
一方、CPU21は、車両の進行方位が東ではないと判断すると(S410でNo)、進行方位が西であるか否か判断し(S430)、西であると判断すると(S430でYes)、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別する(S440)。
【0052】
ここで、右折するものであると判断すると、CPU21は、S443にて、上記判定対象の分岐点に対応する遮蔽物情報から北東のフラグ情報を取得し、左折するものであると判断すると、S447にて、上記判定対象の分岐点に対応する遮蔽物情報から南東のフラグ情報を取得する。また、このようにして、フラグ情報を読み出した後には、S500に処理を移行する。
【0053】
また、CPU21は、車両の進行方位が西ではないと判断すると(S430でNo)、進行方位が南であるか否か判断し(S450)、南であると判断すると(S450でYes)、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別する(S460)。
【0054】
ここで、右折するものであると判断すると、CPU21は、S463にて、上記判定対象の分岐点に対応する遮蔽物情報から北西のフラグ情報を取得し、左折するものであると判断すると、S467にて、上記判定対象の分岐点に対応する遮蔽物情報から北東のフラグ情報を取得する。また、このようにして、フラグ情報を読み出した後には、S500に処理を移行する。
【0055】
一方、車両の進行方位が南ではなく北であると判断すると(S450でNo)、その後S470で、誘導経路が上記判定対象の分岐点で右折するものであるのか、それとも左折するものであるのかを判別し、右折するものであると判断すると、S473にて、上記判定対象の分岐点に対応する遮蔽物情報から南東のフラグ情報を取得し、左折するものであると判断すると、S477にて、上記判定対象の分岐点に対応する遮蔽物情報から南西のフラグ情報を取得する。そして、S500に処理を移行する。
【0056】
S500において、CPU21は、上記遮蔽物判定前処理により取得したフラグ情報に基づいて、車両の進路前方に位置する上記判定対象の分岐点付近に、分岐点より先の誘導経路(即ち、誘導経路に沿って車両が走行する場合に、上記判定対象の分岐点通過後に車両が走行する予定の経路)を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断する。具体的に、CPU21は、上記遮蔽物判定前処理により取得したフラグ情報が値「1」を示していると、分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断して(S500でYes)、S600〜S800の処理を実行せずに、当該拡張リルート制御処理を一旦終了する。
【0057】
一方、上記遮蔽物判定前処理により取得したフラグ情報が値「0」を示していると、CPU21は、分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在しないと判断し(S500でNo)、図7に示す視線・速度監視処理を実行する(S600)。尚、図7は、CPU21が実行する視線・速度監視処理を表すフローチャートである。
【0058】
視線・速度監視処理を実行すると、CPU21は、位置確定部25から、車両の現在位置及び進行方位を表す情報を取得し(S610)、この情報と、道路地図情報に含まれる上記判定対象の分岐点の位置座標と、に基づき、車両が上記判定対象の分岐点より手前側所定距離X1離れた地点(以下、これを「第一地点」と表現する。)を、分岐点側に通過したか否かを判断する(S615)。尚、この判断は、道路地図情報に含まれる上記判定対象の分岐点の位置座標と、車両の現在位置の座標との差が所定距離X1未満で、車両の進行方位が分岐点側を向いているか否かを判断することにより、実現することができる。
【0059】
ここで、車両が第一地点を通過していないと判断すると(S615でNo)、CPU21は、車両が第一地点を通過するまで待機し、通過したと判断すると(S615でYes)、S620にて、車両の走行速度Vを把握する。具体的に、CPU21は、車両の走行速度を検出可能な距離センサ15の出力信号を速度情報として取得し、この出力信号が示す単位時間当たりの車両の走行距離を、車両の走行速度Vとして設定する。
【0060】
この後、CPU21は、車両の走行速度Vが、試験等に基づいて予め設定された閾値Vs未満であるか否か判断し(S630)、閾値Vs未満であると判断すると(S630でYes)、リルートを禁止するためのリルート禁止フラグをセットし(S640)、S700に移行する。
【0061】
一方、車両の走行速度Vが閾値Vs以上であると判断すると(S630でNo)、CPU21は、視線検出装置39から、その時点での運転者の視線の向きを表す図4に示す構成の視線検出結果を取得し(S650)、これをRAM23に書き込んで、図8に示す構成の検出結果履歴テーブルを作成する(S660)。尚、図8は、検出結果履歴テーブルの構成を表す説明図である。具体的に、CPU21は、視線検出装置39から取得した視線検出結果と、その視線検出時点で車両が位置する地点の上記判定対象の分岐点からの距離Xとを、互いに関連付けて、検出結果履歴テーブルに書き込む(S660)。
【0062】
その後、CPU21は、位置確定部25から車両の現在位置及び進行方位を表す情報を取得し(S670)、この情報に基づいて、上記判定対象の分岐点と第一地点との間に位置する地点であって上記判定対象の分岐点からの距離X2(X2<X1)の地点(以下、これを「第二地点」と表現する。)を、車両が分岐点側に通過したか否か判断する(S675)。
【0063】
ここで、車両が第二地点を通過していないと判断すると(S675でNo)、CPU21は、S620に移行して、現時点での車両の走行速度Vを把握し、車両の走行速度Vが依然として閾値Vs以上である場合には、その時点での運転者の視線の向きを表す視線検出結果を視線検出装置39から取得し(S650)、これを現時点での車両位置を表す距離X(即ち、分岐点からの距離X)の情報と共に、検出結果履歴テーブルに書き込む(S660)。尚、この際には、後の処理にてタイムスタンプが表す時刻Tから視線を向けた時間を算出する都合上、検出結果を検出順に並べて検出結果履歴テーブルを作成する。
【0064】
一方、車両の走行速度Vが閾値Vs未満に下がった場合、CPU21は、S630でYesと判断して、リルート禁止フラグをセットし(S640)、S700に移行する。
また、車両が第二地点を通過したと判断すると(S675でYes)、CPU21は、図9に示す視線分析処理を実行する(S680)。図9は、CPU21が実行する視線分析処理を表すフローチャートである。視線分析処理を実行すると、CPU21は、リルート禁止フラグをセット・リセットする際の判断に用いる運転者の垂直方向の視線の向きを表す角度Θvの閾値Θvs1,Θvs2を設定する。尚、図10は、閾値Θvs1,Θvs2及び閾値Θhs1,Θhs2を表す説明図である。この閾値Θvs1,Θvs2は、フロントガラスを介して運転者が外界を視認できる範囲に基づいて決定される。
【0065】
例えば、閾値Θvs1としては、運転者がフロントガラスを通じて運転席から視認することができる外界の下縁に視線を向けた場合に、視線検出装置39から得られる垂直方向の角度Θvを設定することができる。また、閾値Θvs2としては、運転者がフロントガラスを通じて運転席から視認することができる外界の上縁に視線を向けた場合に、視線検出装置39から得られる垂直方向の角度Θvを設定することができる。
【0066】
この処理は、予め試験により、運転者がフロントガラスを通じて運転席から視認することができる外界の下縁に視線を向けた場合の角度Θvと、運転者がフロントガラスを通じて運転席から視認することができる外界の上縁に視線を向けた場合の角度Θvとを得て、これを図示しないEEPROM等に記憶させておき、この記憶値をEEPROMから読み出して、閾値Θvs1,Θvs2に設定することにより、実現することが可能である。S681での処理を終えると、CPU21は、続くS682にて、リルート禁止フラグをセット・リセットする際の判断に用いる運転者の水平方向の視線の向きを表す角度Θhの閾値Θhs1,Θhs2を設定する。
【0067】
具体的に、CPU21は、誘導経路が上記判定対象の分岐点において左折するものである場合、図10(b)に示すように、閾値Θhs1を値(ΘHS−ΔΘh1)に設定し(Θhs1=ΘHS−ΔΘh1)、閾値Θhs2を180°に設定する(Θhs2=180°)。尚、角度ΘHSは、運転者の視線を向きを評価するための基準線LNの水平方向の角度であり、例えば、運転者が車両を直進させている場合に、最も頻度の高い視線の向きを表す水平方向の角度Θhを、角度ΘHSとすることができる。その他、角度ΘHS=90°としてもよい。その他、角度ΔΘh1は、基準線LNからの視線のずれを表すものである。
【0068】
本実施例では、運転者の視線の向きが基準線LNより水平方向左側に角度ΔΘh1以下であると、上記判定対象の分岐点より左に延びる誘導経路側に運転者の視線が移動していないと評価する。このため、角度ΔΘh1としては、予め試験等により、上記判定対象の分岐点より左に延びる誘導経路側に運転者の視線が移動していないと評価することが適切な基準線LNからの水平方向の角度の限界値が設定される。尚、値(ΘHS−ΔΘh1)は、試験結果に基づき、予めEEPROM等に記憶させておけばよく、S682では、EEPROMの記憶値を、閾値Θhs1に設定すればよい。
【0069】
一方、誘導経路が上記判定対象の分岐点において右折するものである場合、CPU21は、図10(c)に示すように、閾値Θhs1を0°に設定し(Θhs1=0°)、閾値Θhs2を値(ΘHS+ΔΘh2)に設定する(Θhs2=ΘHS+ΔΘh2)。尚、角度ΔΘh2は、基準線LNからの視線のずれを表すものである。本実施例では、運転者の視線の向きが基準線LNより水平方向右側に角度ΔΘh2以下であると、上記判定対象の分岐点より右に延びる誘導経路側に運転者の視線が移動していないと評価する。
【0070】
このため、角度ΔΘh2としては、予め試験等により、上記判定対象の分岐点より右に延びる誘導経路側に運転者の視線が移動していないと評価することが適切な基準線LNからの水平方向の角度の限界値が設定される。尚、値(ΘHS+ΔΘh2)は、予めEEPROM等に記憶させておけばよく、S682では、EEPROMの記憶値を、閾値Θhs2に設定すればよい。
【0071】
S682での処理を終えると、CPU21は、車両が上記第一地点を通過してから第二地点を通過するまでの間に視線検出装置39から取得した視線検出結果であって、S685での判断対象となっていない視線検出結果のうち、タイムスタンプの時刻Tが最も古いものを、上述の検査結果履歴テーブルから読み出す(S684)。
【0072】
そして、読み出した視線検出結果が示す垂直方向の角度Θvが、値Θvs1からΘvs2までの範囲内に収まっているか否かを判断する(S685)。即ち、S685では、S684で読み出した視線検出結果が示す垂直方向の角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値であるか否かを判断する。
【0073】
ここで、角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値ではないと判断すると(S685でNo)、CPU21は、S684に移行して、未処理の視線検出結果の内、時刻Tの最も古いものを検査結果履歴テーブルから読み出し、その視線検出結果が示す垂直方向の角度Θvが、値Θvs1からΘvs2までの範囲内に収まっているか否かを判断する(S685)。
【0074】
S684で読み出した視線検出結果が示す垂直方向の角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値であると判断すると(S685でYes)、CPU21は、続くS687にて、S684で読み出した視線検出結果が示す水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっているか否かを判断する。即ち、S687では、S684で読み出した視線検出結果が示す水平方向の角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足する値であるか否か判断する。
【0075】
そして、水平方向の角度Θhが関係式Θhs1≦Θh≦Θhs2を満足する値であると判断すると(S687でYes)、S684に移行し、未処理の視線検出結果の内、時刻Tの最も古いものを検査結果履歴テーブルから読み出し、その視線検出結果が示す角度Θvが、値Θvs1からΘvs2までの範囲内に収まっているか否かを判断する。
【0076】
一方、水平方向の角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足しない値であると判断すると(S687でNo)、CPU21は、タイムスタンプが示す時刻Tから、水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0を算出する(S689)。
【0077】
具体的に、ここでは、運転者の水平方向の視線の向きを表す角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足しない値であると判断された視線検出結果のタイムスタンプが時刻T[n]を表している場合、この視線検出の前の回に検出された視線検出結果のタイムスタンプが表す時刻T[n−1]を用いて、値(T[n]−T[n−1])を、運転者の水平方向の視線の向きを表す角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0として算出する。但し、S684で読み出した視線検出結果が、第一地点の通過後、最初に検出した視線の検出結果である場合(即ち、n=1である場合)には、上述の方法で時刻T0を算出することができないので、時刻T0=0に設定する。
【0078】
S689での処理を終えると、CPU21は、S691に移行して、検出された水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0の総計T1を算出する。具体的には、変数T1の初期値を0とし、この変数T1にS689で求めた時間T0を加算することで、運転者の水平方向の視線の向きを表す角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0の総計T1を算出する。
【0079】
この後、CPU21は、総計T1が、予め定められた閾値Ts以上であるか否か判断し(S693)、総計T1が閾値Ts未満であると判断すると(S693でNo)、検査結果履歴テーブルに記載の各時刻毎の視線検出結果の全てについて、S685での判断が終了したか否かを判断する(S695)。
【0080】
そして、終了していないと判断すると(S695でNo)、検査結果履歴テーブルから次の視線検出結果を読み出し、その垂直方向の角度Θvが、関係式Θvs1≦Θv≦Θvs2を満足する値であって、水平方向の角度Θhが、関係式Θhs1≦Θh≦Θhs2を満足しない値である場合には、その視線検出結果のタイムスタンプが示す時刻T[n]と、この視線検出の前の回に検出された視線検出結果のタイムスタンプが示す時刻T[n−1]を用いて、水平方向の角度Θhが、値Θhs1からΘhs2までの範囲内に収まっていない時間T0=T[n]−T[n−1]を算出し(S689)、総計T1を更新する(S691)。
【0081】
このような処理を繰返し行った結果、総計T1が閾値Ts以上となると、CPU21は、S693でYesと判断してS697に移行し、リルート禁止フラグをセットして、S700に移行する。一方、上述の処理を全視線検出結果について繰返し行っても、総計T1が閾値Ts未満であると、CPU21は、全視線検出結果についての処理が終了した時点で(S695でYes)、S699に移行し、リルート禁止フラグをリセットした状態で、当該視線分析処理を終了する。その後、S700に移行する。
【0082】
S700に処理を移行すると、CPU21は、リルート禁止フラグの状態を判別することにより、リルートを実行してもよいか否かを判断する。ここで、リルート禁止フラグがセットされていると、CPU21はNoと判断して、リルート(S800での処理)を実行せずに当該拡張リルート制御処理を一旦終了する。
【0083】
一方、CPU21は、リルート禁止フラグがリセットされていると判断すると、S700でYesと判断してS800に移行し、経路探索部27に探索条件を設定して、その条件で、車両の現在位置から目的地までの最適な経路を探索させ、それを誘導経路に設定させる。その後、当該拡張リルート制御処理を一旦終了する。
【0084】
具体的に、S700でYesと判断された場合には、車両が第一地点を通過してから第二地点を通過するまでの期間に、運転者の視線が所定時間Ts以上、車両の前後方向に延びる基準線LNから、上記判定対象の分岐点より先の誘導経路側に所定角度ΔΘh1又はΔΘh2より大きく向いていないので、運転者が旋回地点で誘導経路に沿って車両を走行させないと予測される。従って、S800では、現在設定されている誘導経路が上記判定対象の分岐点で示す誘導方向とは異なる方向に車両を誘導可能な経路を、経路探索部27に探索させる。
【0085】
図5(b)は、拡張リルート制御処理のS800で実行される処理内容の例を示したフローチャートである。図5(b)に示す処理では、まず、上記判定対象の分岐点(ノード)に接続されているリンクを道路地図情報に基づいて把握し(S810)、分岐点に接続されているリンクのうち、現在設定されている誘導経路が含むリンク以外のリンクであって、当該車両が進入可能なリンクを経路の探索対象に選択する(S820)。尚、現在設定されている誘導経路が含むリンクとは、上記判定対象の分岐点より車両側であって現在車両が走行中のリンク、及び、誘導経路が示す上記判定対象の分岐点より先のリンクのことである。
【0086】
そして、上記選択したリンクの夫々について、そのリンクを含む現在位置から目的地までの最適な経路を経路探索部27に探索させ(S830)、上記選択した各リンクを含む経路のうち、最適な経路を誘導経路に設定させる(S840)。尚、S840では、例えば、車両が上記判定対象の分岐点で直進する方向の経路を、誘導経路として優先的に選択させるようにすることができる。また、S800の処理では、進路前方の上記判定対象の分岐点までの誘導経路が基本的に変更されないので、車両の現在位置から進路前方の上記判定対象の分岐点までの誘導経路を変更しないことを前提として、上記判定対象の分岐点から目的地までの経路を経路探索部27に探索させてもよい。
【0087】
以上、本実施例のナビゲーション装置1について説明したが、このナビゲーション装置1では、経路探索部27により設定された誘導経路が車両の進路前方に位置する分岐点において車両の旋回を伴う経路である場合に、CPU21が、位置確定部25から得た車両の現在位置を表す情報に基づき、車両の進路前方に位置する上記旋回を伴う最寄の分岐点より車両側に所定距離X1手前の第一地点を、車両が通過したか否か判断する(S615)。
【0088】
そして、車両が第一地点を通過してから、上記分岐点と第一地点との間に位置する第二地点を通過するまでの期間に、車両の運転者が向けた視線の向きを表す視線検出結果を、視線検出装置から取得する(S650)。また、取得した視線検出結果に基づいて、視線分析処理(S680)により、運転者が上記旋回を伴う最寄(次)の分岐点で誘導経路に沿って車両を走行させるか否かを予測する。
【0089】
ここで、CPU21は、車両が第一地点を通過してから第二地点を通過するまでの期間に、運転者の視線が、所定時間Ts以上、車両の前後方向に延びる基準線LNから上記分岐点より先の誘導経路側に、水平方向に沿って所定角度ΔΘh1,ΔΘh2より大きく向いたか否か判断する(S684〜S695)。
【0090】
そして、運転者の視線が、時間Ts以上、基準線LNから上記誘導経路側に角度ΔΘh1,ΔΘh2より大きく向いていないと判断すると、運転者が上記分岐点で誘導経路に沿って車両を走行させないと予測し(S699)、現在設定されている誘導経路が上記分岐点にて示す誘導方向とは異なる方向に車両を誘導可能な経路を探索して、それを誘導経路に設定する(S800)。一方で、運転者の視線が、時間Ts以上、基準線LNから上記誘導経路側に角度ΔΘh1,ΔΘh2より大きく向いている場合には、運転者が上記分岐点で誘導経路に沿って車両を走行させると予測し、リルート禁止フラグをセットして(S697)、S800でのリルートを禁止する。
【0091】
即ち、このナビゲーション装置1では、図11左図のように、誘導経路が車両前方の分岐点で左方向への旋回を伴う経路である場合に、運転者の視線が誘導方向(左方向)を向いておらず運転者が旋回の意思を見せていないと、S800の処理にて、現在の誘導方向(左方向)とは別の方向(直進方向又は右方向)に車両を誘導する誘導経路が分岐点通過前に設定され、運転者に案内される(図11右図参照)。その一方で、運転者の視線が誘導方向(左方向)を向いており運転者が誘導方向への旋回の意思を見せている場合には、S800の処理が実行されず、引き続き同じ誘導経路(図11左図)が案内される。
【0092】
従って、このナビゲーション装置1によれば、運転者が誘導経路とは異なる経路に車両を走行させる場合に、従来装置よりも早く適切に経路の再探索を実行することができ、適切な経路案内を実行することができる。例えば、運転者が案内内容を正しく理解しておらず、右左折を案内する分岐点で直進してしまう場合でも、分岐点通過前に直ちに誘導経路を修正し、その誘導経路を運転者に案内することができる。また、上記方法を用いて運転者の行動を予測すれば、右左折位置・安全確認のための視認行動とは関係なく向けた視線により、誤った予測結果を導いてしまうのを抑えることができ、簡単な演算処理で運転者が誘導経路に沿って車両を走行させるか否かを正確に予測することができる。
【0093】
また、本実施例のナビゲーション装置1では、CPU21が、車両の走行速度を表す速度情報として、距離センサから出力信号を取得し(S620)、この出力信号に基づき、車両の走行速度Vを把握する。そして、この情報に基づき、車両の走行速度が予め定められた所定速度Vs未満であるか否かを判断し(S630)、車両の走行速度Vが所定速度Vs未満である場合には、リルートを禁止する(S640)。
【0094】
従って、このナビゲーション装置1によれば、車両の走行速度が遅く、運転者の視線が信号機側を向いている可能性が高い場合に、誤った予測でリルートを実行することがなく利用者にとって好ましくない時期に誘導経路の変更が行われてしまうのを防止することができる。
【0095】
その他、本実施例のナビゲーション装置1では、CPU21が、遮蔽物情報に基づいて、車両の進路前方に位置する上記分岐点付近に、その分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断し(S400〜S500)、この分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断される場合には、S600〜S800の処理をスキップすることにより、リルートを禁止する。
【0096】
分岐点付近に、分岐点より先の誘導経路の視認を妨げるような建造物があると、運転者の視線が誘導経路側に向きにくく、誤った予測結果を導いてしまう可能性あるが、このナビゲーション装置1によれば、運転者から分岐点より先の誘導経路を視認することができない可能性がある場合に、S800での処理を実行しないので、利用者にとって好ましくない時期に誘導経路の変更が実行されてしまうのを防止することができる。
【0097】
尚、本発明の通過判断手段は、CPU21が実行するS615にて実現されており、視線情報取得手段は、S650にて実現されている。その他、予測判定手段は、視線分析処理(S680)にて実現されており、リルート手段は、S800にて実現されている。
【0098】
その他、本発明の速度情報取得手段は、CPU21が実行するS620にて実現され、速度判断手段はS630にて実現され、速度依存型禁止手段はS640にて実現されている。また、遮蔽物判断手段は、CPU21が実行するS400〜S500にて実現され、遮蔽物依存型禁止手段は、S800の処理を実行せずに当該拡張リルート制御処理を一旦終了する処理にて実現されている。
【0099】
また、本発明の経路案内装置は、上記実施例に限定されるものではなく、種々の態様を採ることができる。例えば、上記実施例のナビゲーション装置1には、値Θvs1,Θvs2,ΘHS,ΔΘh1,ΔΘh2,Ts,Vsを学習更新するための機能を設けてもよい。学習更新機能を設ければ、より好適なタイミングでリルートを実行することができる。
【図面の簡単な説明】
【0100】
【図1】本実施例のカーナビゲーション装置1の構成を表すブロック図である。
【図2】遮蔽物情報の構成を表す説明図である。
【図3】視線検出装置39により検出される角度Θh及びΘvを表す説明図である。
【図4】制御回路20にて実現される機能の一部を表した機能ブロック図である。
【図5】CPU21が繰返し実行する拡張リルート制御処理を表すフローチャート(a)及びS800で実行される処理内容の具体例を示したフローチャート(b)である。
【図6】CPU21が実行する遮蔽物判定前処理を表すフローチャートである。
【図7】CPU21が実行する視線・速度監視処理を表すフローチャートである。
【図8】検出結果履歴テーブルの構成を表す説明図である。
【図9】CPU21が実行する視線分析処理を表すフローチャートである。
【図10】閾値Θvs1,Θvs2,Θhs1,Θhs2を表す説明図である。
【図11】拡張リルート制御処理による誘導経路の変更態様を示した説明図である。
【符号の説明】
【0101】
1…ナビゲーション装置、10…位置検出装置、11…GPS受信機、13…ジャイロスコープ、15…距離センサ、17…地磁気センサ、20…制御回路、21…CPU、22…ROM、23…RAM、25…位置確定部、26…インタフェース部、27…経路探索部、28…経路案内部、29…リルート制御部、31…地図データ入力器、33…表示装置、35…外部情報入出力装置、36…操作スイッチ群、37a…リモコン、37b…リモコンセンサ、38…音声出力装置、39…視線検出装置
【特許請求の範囲】
【請求項1】
道路地図情報を取得する地図情報取得手段と、
車両の現在位置を表す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段が取得した位置情報と、前記地図情報取得手段が取得した道路地図情報と、に基づき、車両の現在位置から予め設定された目的地までの経路を探索し、誘導経路を設定する経路探索手段と、
を備える経路案内装置であって、
車両の運転者が向けた視線の向きを表す情報を、運転者の視線の向きを検出する視線検出装置から取得する視線情報取得手段と、
前記位置情報取得手段が取得した位置情報に基づき、前記経路探索手段により設定された誘導経路における車両の進路前方に位置する分岐点の一つを、所定の規則に従って選択し、前記選択した分岐点を基準分岐点として、車両が前記基準分岐点より車両側に所定距離手前の地点を通過したか否かを判断する通過判断手段と、
前記通過判断手段により車両が前記所定距離手前の地点を通過したと判断された場合、前記視線情報取得手段が取得する前記視線の向きを表す情報に基づき、前記基準分岐点にて、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する予測判定手段と、
前記予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測判定されると、前記経路探索手段に、前記基準分岐点から予め設定された目的地までの経路を探索させるリルート手段と、
を備えることを特徴とする経路案内装置。
【請求項2】
道路地図情報を取得する地図情報取得手段と、
車両の現在位置を表す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段が取得した位置情報と、前記地図情報取得手段が取得した道路地図情報と、に基づき、車両の現在位置から予め設定された目的地までの経路を探索し、誘導経路を設定する経路探索手段と、
を備える経路案内装置であって、
前記位置情報取得手段が取得した位置情報に基づき、前記経路探索手段により設定された誘導経路における車両の旋回を伴う分岐点のうち、車両の進路前方に位置する次の分岐点を基準分岐点として、その基準分岐点より車両側に所定距離手前の地点を、車両が通過したか否かを判断する通過判断手段と、
前記通過判断手段により、車両が前記所定距離手前の地点を通過したと判断されると、運転者の視線の向きを検出する視線検出装置から、車両の運転者が向けた視線の向きを表す情報を取得する視線情報取得手段と、
前記視線情報取得手段が取得した前記視線の向きを表す情報に基づき、前記基準分岐点にて、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する予測判定手段と、
前記予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測判定されると、前記経路探索手段に、車両の現在位置から予め設定された目的地までの経路であって、現在設定されている誘導経路が前記基準分岐点において示す誘導方向とは異なる方向に車両を誘導可能な経路を探索させるリルート手段と、
を備えることを特徴とする経路案内装置。
【請求項3】
前記予測判定手段は、
前記視線情報取得手段が取得した前記視線の向きを表す情報に基づき、運転者の視線が、車両の前後方向に延びる基準線から、前記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断する視線判断手段、
を備え、前記視線判断手段により、運転者の視線が、前記基準線から前記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測判定することを特徴とする請求項2記載の経路案内装置。
【請求項4】
前記予測判定手段は、
前記視線情報取得手段が取得した前記視線の向きを表す情報に基づき、運転者の視線が、所定時間以上、車両の前後方向に延びる基準線から、前記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断する視線判断手段、
を備え、前記視線判断手段により、運転者の視線が、所定時間以上、前記基準線から前記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測判定することを特徴とする請求項2記載の経路案内装置。
【請求項5】
前記視線情報取得手段は、前記通過判断手段により、車両が前記所定距離手前の地点としての第一の地点を通過したと判断されてから、前記基準分岐点と前記第一の地点との間に位置する第二の地点を、車両が通過するまでの期間に、車両の運転者が向けた視線の向きを表す情報を、前記視線検出装置から取得することを特徴とする請求項1〜請求項4のいずれかに記載の経路案内装置。
【請求項6】
車両の走行速度を検出する速度検出装置から、前記車両の走行速度を表す速度情報を取得する速度情報取得手段と、
前記速度情報取得手段が取得した速度情報に基づき、車両の走行速度が予め定められた所定速度未満であるか否かを判断する速度判断手段と、
前記速度判断手段により前記車両の走行速度が所定速度未満であると判断されると、前記リルート手段の動作を禁止する速度依存型禁止手段と、
を備えることを特徴とする請求項1〜請求項5のいずれかに記載の経路案内装置。
【請求項7】
前記道路地図情報は、各分岐点毎に、その分岐点付近に運転者の視界から分岐点より先の道路を遮蔽する可能性のある建造物が存在するか否かを表す遮蔽物情報を有し、
当該経路案内装置は、
前記遮蔽物情報に基づいて、前記基準分岐点付近に、前記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断する遮蔽物判断手段と、
前記遮蔽物判断手段により、前記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断されると、前記リルート手段の動作を禁止する遮蔽物依存型禁止手段と、
を備えることを特徴とする請求項1〜請求項6のいずれかに記載の経路案内装置。
【請求項1】
道路地図情報を取得する地図情報取得手段と、
車両の現在位置を表す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段が取得した位置情報と、前記地図情報取得手段が取得した道路地図情報と、に基づき、車両の現在位置から予め設定された目的地までの経路を探索し、誘導経路を設定する経路探索手段と、
を備える経路案内装置であって、
車両の運転者が向けた視線の向きを表す情報を、運転者の視線の向きを検出する視線検出装置から取得する視線情報取得手段と、
前記位置情報取得手段が取得した位置情報に基づき、前記経路探索手段により設定された誘導経路における車両の進路前方に位置する分岐点の一つを、所定の規則に従って選択し、前記選択した分岐点を基準分岐点として、車両が前記基準分岐点より車両側に所定距離手前の地点を通過したか否かを判断する通過判断手段と、
前記通過判断手段により車両が前記所定距離手前の地点を通過したと判断された場合、前記視線情報取得手段が取得する前記視線の向きを表す情報に基づき、前記基準分岐点にて、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する予測判定手段と、
前記予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測判定されると、前記経路探索手段に、前記基準分岐点から予め設定された目的地までの経路を探索させるリルート手段と、
を備えることを特徴とする経路案内装置。
【請求項2】
道路地図情報を取得する地図情報取得手段と、
車両の現在位置を表す位置情報を取得する位置情報取得手段と、
前記位置情報取得手段が取得した位置情報と、前記地図情報取得手段が取得した道路地図情報と、に基づき、車両の現在位置から予め設定された目的地までの経路を探索し、誘導経路を設定する経路探索手段と、
を備える経路案内装置であって、
前記位置情報取得手段が取得した位置情報に基づき、前記経路探索手段により設定された誘導経路における車両の旋回を伴う分岐点のうち、車両の進路前方に位置する次の分岐点を基準分岐点として、その基準分岐点より車両側に所定距離手前の地点を、車両が通過したか否かを判断する通過判断手段と、
前記通過判断手段により、車両が前記所定距離手前の地点を通過したと判断されると、運転者の視線の向きを検出する視線検出装置から、車両の運転者が向けた視線の向きを表す情報を取得する視線情報取得手段と、
前記視線情報取得手段が取得した前記視線の向きを表す情報に基づき、前記基準分岐点にて、運転者が誘導経路に沿って車両を走行させるか否かを予測判定する予測判定手段と、
前記予測判定手段により運転者が誘導経路に沿って車両を走行させないと予測判定されると、前記経路探索手段に、車両の現在位置から予め設定された目的地までの経路であって、現在設定されている誘導経路が前記基準分岐点において示す誘導方向とは異なる方向に車両を誘導可能な経路を探索させるリルート手段と、
を備えることを特徴とする経路案内装置。
【請求項3】
前記予測判定手段は、
前記視線情報取得手段が取得した前記視線の向きを表す情報に基づき、運転者の視線が、車両の前後方向に延びる基準線から、前記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断する視線判断手段、
を備え、前記視線判断手段により、運転者の視線が、前記基準線から前記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測判定することを特徴とする請求項2記載の経路案内装置。
【請求項4】
前記予測判定手段は、
前記視線情報取得手段が取得した前記視線の向きを表す情報に基づき、運転者の視線が、所定時間以上、車両の前後方向に延びる基準線から、前記基準分岐点より先の誘導経路側に所定角度以上向いたか否かを判断する視線判断手段、
を備え、前記視線判断手段により、運転者の視線が、所定時間以上、前記基準線から前記基準分岐点より先の誘導経路側に所定角度以上向かなかったと判断されると、運転者が誘導経路に沿って車両を走行させないと予測判定することを特徴とする請求項2記載の経路案内装置。
【請求項5】
前記視線情報取得手段は、前記通過判断手段により、車両が前記所定距離手前の地点としての第一の地点を通過したと判断されてから、前記基準分岐点と前記第一の地点との間に位置する第二の地点を、車両が通過するまでの期間に、車両の運転者が向けた視線の向きを表す情報を、前記視線検出装置から取得することを特徴とする請求項1〜請求項4のいずれかに記載の経路案内装置。
【請求項6】
車両の走行速度を検出する速度検出装置から、前記車両の走行速度を表す速度情報を取得する速度情報取得手段と、
前記速度情報取得手段が取得した速度情報に基づき、車両の走行速度が予め定められた所定速度未満であるか否かを判断する速度判断手段と、
前記速度判断手段により前記車両の走行速度が所定速度未満であると判断されると、前記リルート手段の動作を禁止する速度依存型禁止手段と、
を備えることを特徴とする請求項1〜請求項5のいずれかに記載の経路案内装置。
【請求項7】
前記道路地図情報は、各分岐点毎に、その分岐点付近に運転者の視界から分岐点より先の道路を遮蔽する可能性のある建造物が存在するか否かを表す遮蔽物情報を有し、
当該経路案内装置は、
前記遮蔽物情報に基づいて、前記基準分岐点付近に、前記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在するか否かを判断する遮蔽物判断手段と、
前記遮蔽物判断手段により、前記基準分岐点より先の誘導経路を、運転者の視界から遮蔽する可能性のある建造物が存在すると判断されると、前記リルート手段の動作を禁止する遮蔽物依存型禁止手段と、
を備えることを特徴とする請求項1〜請求項6のいずれかに記載の経路案内装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】

【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−29822(P2006−29822A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−205108(P2004−205108)
【出願日】平成16年7月12日(2004.7.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月12日(2004.7.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]