
通信装置及び通信システム並びに乗物のような移動ノード間で通信する方法
少なくとも1つのメッセージ(22)を通信する少なくとも1つの送信ユニット(20)と、少なくとも1つの隣接ノード(12、14、16)により通信された少なくとも1つの到達メッセージ(32、34、36)を検知する少なくとも1つの受信ユニット(30)と、各ノード(10、12、14、16)の移動方向及び/又は現在位置を決定及び/又は監視する少なくとも1つの位置測定ユニット(60)とを有する移動ノード(10、12、14、16)間の通信用の通信装置(100)を提供し、ノード間通信(特に乗物間通信)のブロードキャストメッセージの量が減少するために、ノード(10、12、14、16)間で通信される各メッセージ(22、32、34、36)が、少なくとも1つのメッセージ形式及び/又はメッセージ対象と、各メッセージ(22、32、34、36)が送信されるノード(10、12、14、16)の移動方向に関する少なくとも1つの方向領域とに割り当てられることが提案され、移動方向は、各ノード(10、12、14、16)の位置測定ユニット(60)により決定及び/又は監視される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通信装置及び移動ノード間で(特に乗物間で)通信する方法に関し、各ノードは、
−移動方向及び/又は各ノードの現在位置を決定及び/又は監視し、
−少なくとも1つの隣接ノードにより通信される(特にブロードキャスト及び/又はマルチキャストされる)少なくとも1つの到達メッセージを検知し、
−少なくとも1つのメッセージを通信する(特にブロードキャスト及び/又はマルチキャスト)するように設計される。
【背景技術】
【0002】
Abdelmalik Bachir及びAbderrahim Benslimaneによる従来技術の文献“A Multicast Protocol in Ad hoc Networks Inter-Vehicle Geocast [Proceedings of 58th IEEE Vehicular Technology Conference, fall 2003, volume 57, issue 4, 2456〜2460ページ]”は、前述の技術分野に直接関連し、最新技術を要約している。この文献は、いわゆるIVG(Inter-Vehicle Geocast)アルゴリズムになるように既存のアルゴリズムを組み合わせ、低い市場浸透率の問題に対処している。
【0003】
この文献でBachir及びBenslimaneにより議論されているシナリオは、一方向の直線道路(例えば高速道路)に限定されている。一方向の直線道路では、重要な領域が基準の乗物の運転方向にあり、危険がある場合に、基準の乗物の後ろの全ての乗物が警告される必要がある。
【0004】
IVG(Inter-Vehicle Geocast)アルゴリズムは、いわゆる“中継(relay)”によってメッセージを再ブロードキャストすることに基づく。Bachir及びBenslimaneによる文献は、再ブロードキャストのタイミング制約に焦点を当てており、メッセージ発信元への計算距離に応じて、いわゆる専用タイマにより制御されるいわゆる“保留時間(defer time)”を規定する。
【0005】
Bachir及びBenslimaneによる文献によれば、受信メッセージ毎に、乗物はメッセージ発信元(例えば破損した乗物)に対してその位置を決定しなければならず、受信メッセージが関係あるか否かを定めなければならない。乗物が重要な領域に向かっている場合、且つメッセージが最初に受信された場合に、受信メッセージは関係がある。
【0006】
保留タイマが終了する前に乗物が同じ警告メッセージを受信した場合、同じ警告メッセージをブロードキャストしている他の乗物がその後ろに存在すると結論を出す。この状況で、乗物は第1の警告メッセージにより事故について既に通知を受けているため、第2の警告メッセージは関係ない。更に、この状況で、乗物の後ろに第2の警告メッセージの警告の配布を確保する中継が存在するため、第2の警告メッセージを再ブロードキャストすることは無益である。
【0007】
更に、Bachir及びBenslimaneによる文献によれば、保留タイマが終了した後に同一のメッセージが受信できない場合、ノードは、通知される最後のノードであると考え、メッセージを反復し始める。保留タイマの概念は、発信元領域から大きい距離を有するノードが警告メッセージを再ブロードキャストする最初のものであることを確保する。
【0008】
中継の乗物の後ろの他の乗物が警告メッセージを受信した場合、他の乗物は、保留時間アルゴリズムを実行し、タイマが終了したときに、他の乗物はこの警告メッセージを再ブロードキャストする。この時点で、中継ノードは同じ警告メッセージを受信し、他の乗物も中継局の役目を取り戻すため、定期的なブロードキャストを中止する。
【0009】
Bachir及びBenslimaneによる方法は、
−乗物の既知のGPS(Global Positioning System)位置及び
−乗物の方向
を情報として使用する。
【0010】
しかし、IVGの概念は承認の一種として他のノードからの同一のメッセージの受信を解釈するため、IVG(Inter-Vehicle Geocast)の概念の適用性は、一方向の道路トポロジに制限され、危険が常に道路の“前”にあることを仮定する。
【0011】
この従来技術以外に、文献US2004/0083035A1は、各乗物に設置されたブロードキャスト送信機及び受信機に基づいて、専用の緊急周波数を使用して衝突防止する警告メッセージシステムを記載している。しかし、メッセージのブロードキャスト及び承認についてのネットワーク機能は範囲外である。
【0012】
従来技術の文献US6720920B2は、乗物間で通信する方法及び構成を開示しており、
−GPS位置と利用可能な地図データとに基づいてメッセージの関連性を検査し、
−特定の乗物を指定して応答を待機し、様々な手段及び技術的な実装(例えば、IR(InfraRed)及びマイクロ波、再ブロードキャスト、固有の識別子に符号化された位置での雑音レーダ、様々なシステム要素を有するゼロ交通事故死亡者システム、乗物間通信等)を使用することが提案されている。
【0013】
更に、以下のように、前記の説明に合致する例示的な従来技術のシステムが開示されている。
−従来技術の文献US6370475B1は、車線離脱警告を有する事故防止システムを示している。
−従来技術の文献US6405132B1は、乗物間通信により受信した乗物の位置から衝突の確率を計算する事故防止システムを示している。
−従来技術の文献US2002/0105423A1は、ブレーキ情報が電子メッセージを用いて他の乗物に広がる反応優位性非衝突システムを示している。
−従来技術の文献US2003/0212567A1は、画像取得及び共有での証拠情報サービスを示している。緊急事態が発生すると、緊急信号が領域内の乗物にブロードキャストされ、直前の画像履歴と直後の画像履歴とを保存して送信する。
−M. Sunによる従来技術の文献“CPS-based message broadcast for adaptive inter-vehicle communications” [Proceedings of IEEE Vehicular Technology Conference, fall 2000, volume 6, 2685〜2692ページ; Boston (MA)]”
−M. Sun, W. Feng, T. H. Laiによる従来技術の文献“Location aided broadcast in wireless ad hoc networks” [Proceedings of IEEE GLOBECOM 2001, 2842〜2846ページ, San Antonio (TX)]
−Lars Wischhof, Andre Ebner及びHermann Rohlingによる従来技術の文献“Adaptive Broadcast for Travel and Traffic Information Distribution Based on Inter-Vehicle Communication” [Proceedings of IEEE Intelligent Vehicles Symposium 2003, June 9-11, Columbus (OH)]
−Michael B. Lachlanによる従来技術の文献“Adaptive Layered Data Structure for Inter-Vehicle Communication in Ad-hoc Networks” [Eighth International World Congress on Intelligent Transport Systems, September 2001, Sydney].
この従来技術以外に、Chun-Chuan Yang and Chao-Yu Chenによる文献“A Reachability-Guaranteed Approach for Reducing Broadcast Storms in Mobile Ad Hoc Networks” [Proceedings of 56th IEEE Vehicular Technology Conference, fall 2002, volume 2, 1036〜1040ページ]は、移動アドホックネットワークでブロードキャスト・ストームを低減する手法を開示している。この手法は、位置認識手段に基づいており、ネットワークの各ノードがGPSのような位置決定装置を備えなければならず、その隣接とハローメッセージで位置情報を交換する。
【0014】
しかし、ブロードキャスト・ストームを防止するために、Yang及びChenによる従来技術の文献によるノードは、最初にメッセージを受信した後に、メッセージを再ブロードキャストする前にランダムな数のタイムスロットを待機しなければならない。その時間の間に、ノードは他のノードからも同じメッセージを取得したか否かを監視する。この時点で、ノードは、メッセージを再ブロードキャストしていない全てのノードにメッセージを再ブロードキャストする。
【0015】
前述の全ての成果にもかかわらず、以下の問題が残る。
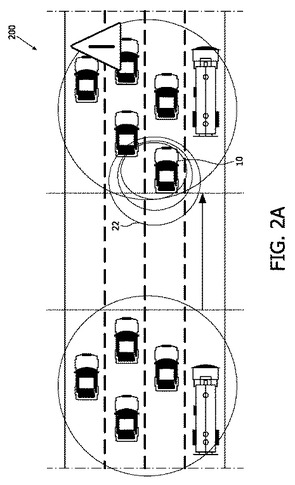
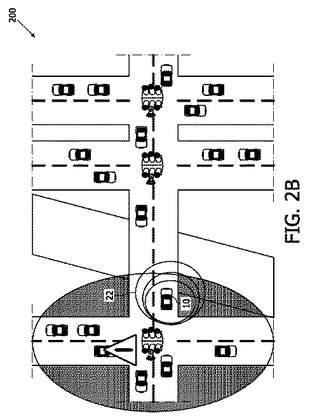
(i)前記の説明に合致するシステムの市場導入中に、装備された乗物の市場浸透率が比較的低く、ブロードキャストメッセージの受信機が利用可能でないという確率が高くなる。図2A及び2Bに示すように、ネットワークは以下のいずれかの理由で分断される。
−可変の乗物速度による短期の動的な問題(例えば間隔)の理由(図2A参照)、又は
−特定の道路トポロジ(例えば長い橋)及び/又は特定の都市のトポロジによる静的な問題の理由(図2B参照)
(ii)ブロードキャストは、何個の受信機が利用可能であるかがわからない特別の形式の通信である。従って、例えばポイント・ツー・ポイント通信用にWLAN(Wireless Local Area Network)標準IEEE802.11に規定された標準的な承認方法が適用できない。
(iii)各乗物が個々に警告メッセージを承認すると、周知のブロードキャスト・ストーム(S. Y. Niによる従来技術の文献“The Broadcast Storm Problem in Mobile Ad Hoc Network” [Proceedings of IEEE MOBICOM 1999, 151〜162ページ, Seattle (WA))は、全体のチャネルスループットの問題になる。
(iv)信号品質(例えばビット誤り率)が街路トポロジに強く関連し、ビルに覆われた領域は、見通し状況の道路及び高速道路に比べてかなり劣化したチャネル状況を有する。このことは、理想的な場合には、信号が道路及び高速道路に沿って指向性アンテナを使用して発信されるべきであることを意味する。
【0016】
このことは、ジオキャスト(geocast)ルーティングアルゴリズム(C. Maihofer, C. Cseh, W. Franz及びR. Eberhardtによる従来技術の文献“Performance evaluation of stored geocast” [Proceedings of IEEE 58th Vehicular Technology Conference, fall 2003, October 6〜9, volume 5, issue 4, 2901〜2905ページ]参照)、又はデジタル地図から得られたナビゲーションデータとの指向性アンテナビームの相互作用を必要とする。
【0017】
明らかに、このことはシステムの複雑性及びコストを増加させ、デジタルデータの精度及び可用性に直接関係する。
【発明の開示】
【発明が解決しようとする課題】
【0018】
前述の欠点及び短所から始まり、前述の従来技術を考慮に入れて、本発明の目的は、ノード間通信(特に乗物間通信)でブロードキャストメッセージの量を減少するように、技術分野に記載した種類の通信装置と、技術分野に記載した種類の方法とを開発することである。
【課題を解決するための手段】
【0019】
本発明の前記の目的は、請求項1の特徴を有する通信装置と、請求項7の特徴を有する方法とにより実現される。本発明の有利な実施例及び好適な改善は、それぞれの従属項に開示されている。
【0020】
本発明により、ブロードキャストメッセージの量が最小に保持され、共有媒体の全体の性能及び可用性を増加させ、その一方で、少なくとも1つの他のノード又は少なくとも1つの隣接ノードに対する少なくとも1つのメッセージ(特に少なくとも1つの警告メッセージ)の到達可能性を最適化する。このシステム及びこの装置を実装するために、ノードの移動方向及び隣接ノードの粗い位置以外に、他のデジタル地図情報が必要ないことが、当業者にわかる。
【0021】
基本的に、本発明は、移動アドホックネットワークで(特に乗物間通信に関して)信頼性のあるスケーラブルなブロードキャストを確保するという概念に基づく。これに関して、“信頼性のある”という用語は、必ずしも100%決定的であることを意味せず、メッセージ(特にノードから隣接ノード(特に近い周囲の様々なノード)に配布され、潜在的にインフラストラクチャ要素に配布される警告メッセージ)の確立された配信を示す。
【0022】
メッセージ受信が保証できないシナリオを考えると、メッセージの少なくとも1つの発信元は、何らかの形式の配信確認が受信されるまでメッセージを再ブロードキャストする必要がある。本発明の好ましい実施例によれば、通信装置は、関係するノード(すなわち、関係する地域にある隣接ノード)がメッセージのブロードキャスト(特に定期的なブロードキャスト)を中止し得るように、メッセージ発信元又はメッセージ送信者にフィードバックを提供するという意味で、信頼性のある少なくとも1つの制御ユニット(特に少なくとも1つのメッセージ配布機構)を有する。
【0023】
本発明は、ネットワークアドレスに依存せず、特に少なくとも1つのメッセージ処理アルゴリズムを用いて、メッセージが関係する地域(特にいわゆる“有効範囲(range to live)”)の各ノードに到達し、メッセージが関係する特定の時間(特にいわゆる“有効時間(time to live)”の間に存続し続けることを確保する。
【0024】
本発明の好ましい実施例によれば、メッセージが再ブロードキャストされることを何らかの方向に移動する少なくとも1つのノードが確保するアルゴリズムが提供される。このノードは、方向の所有者とも呼ばれ得る。
【0025】
このため、本発明の好ましい実施例によれば、各メッセージに承認フィールドを導入するメッセージ配布機構が定められ、承認フィールドは、メッセージが進む方向(例えばメッセージの伝搬方向)に関係する。メッセージの冗長を低減するため、特にノードがメッセージを定期的にブロードキャストするべきか否かを決定するために、承認フィールドの情報が使用され得る。
【0026】
方向の所有者は、所有された方向について承認ビットで各ブロードキャストメッセージにマークを付ける。更に、本発明の好ましい実施例によれば、ノード(特に隣接ノード)は、移動方向を監視して平均化し、その移動方向の承認ビットが設定されていないことを発見した場合に、方向の所有者になることができる。ノードが移動方向を変えると、所有権を解放することができ、他のノードがその方向の新しい所有者になり得ることが確保される。
【0027】
とりわけ欧州委員会e-safetyイニシアチブ(European Commission e-safety initiative)により要求される交通事故死亡者数を低減するために、本発明は、前述の少なくとも2つの通信装置を有する通信システムを提案し、
−通信装置のうち少なくとも1つは基準ノード又は各ノード(特に検討される車又は第1の配送ノード)に割り当てられ、
−通信装置のうち少なくとも1つは隣接ノード(特に隣接の車又は第2の配送ノード)に割り当てられる。
【0028】
通信システムは、センサ又は専用のインフラストラクチャセンサを備えた乗物が潜在的な危険(摩擦の減少、予想外の道路の障害物、後続の交通の安全に影響を与える衝突、又は交通渋滞の隠れた後尾等)を決定する道路警告システムとして実装され得る。メッセージ(特にこれらの警告メッセージ)は、潜在的に関係する地域を対象とした全てのノード(特に全ての乗物)が時間に遅れずに警告されるように、隣接を通じて何らかの無線通信方法(例えば、周知のWLAN標準IEEE802.11)を使用して伝搬され得る。メッセージは、小さい待ち時間を確保し、個々のノード(特に個々の乗物)を指定するオーバーヘッドを回避するようにブロードキャストされる。
【0029】
特に工夫した改良点によれば、本発明は、低い浸透のシナリオ又は大きい乗物間の間隔で車対車のメッセージを配布する無指向性ジオキャストアルゴリズムに基づき得る。
【0030】
本発明は、デジタル地図を使用せずに、ノード周囲でメッセージの確立された配信することにも一般的に適用可能である。このことは、最小数の承認での都市のシナリオにおいても、無指向性のフラッディング(flooding)を可能にする。有利には、ノード(特に中継ノード又は方向の所有者のノード若しくは配送ノード)が再ブロードキャストを中止する前に、複数の承認が集められる。
【0031】
最後に、本発明は、少なくとも1つのアドホックネットワーク(特に少なくとも1つのセンサネットワーク又は無線局所危険警告(例えば車対車通信))について、前述の少なくとも1つの通信装置の使用、及び/又は前述の少なくとも1つの通信システムの使用、及び/又は前述の方法の使用に関し、特に事故のない運転のために、例えば、
−車線変更又は合流措置の間の衝突を回避するために、及び
−目に見えない障害物(例えばはっきりしない物体又は影になった物体)を報告するために、
センサ装備の車は、協調して相互作用し、例えばリアルタイム交通更新の警告メッセージを配信する。
【0032】
代替のシナリオでは、車が消防車に対して自由に保持されるべき交差点に入るときに、本発明を用いて警告されてもよい。
【0033】
前述のように、有利に本発明の教示を具現及び改善する複数の選択肢が存在する。このため、それぞれ請求項1、請求項5及び請求項7による請求項に参照が行われる。本発明の更なる改善、特徴及び利点は、一例として好ましい実施例を参照して、また、添付図面を参照して、詳細に以下に説明される。
【発明を実施するための最良の形態】
【0034】
図1〜3の対応する部分について、同じ参照符号が使用される。
【0035】
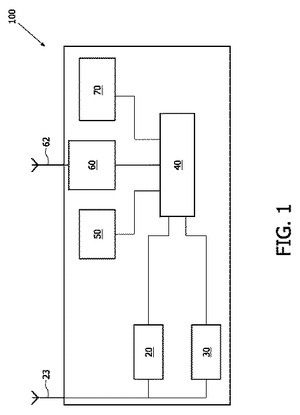
図1は、移動ノード(すなわち乗物10、12、14、16(図2A、2B、2C参照))間で通信する通信装置100を示している。
【0036】
通信装置100は、
−メッセージ22を通信する(すなわちブロードキャスト及び再ブロードキャストする)送信ユニット20と、
−隣接の乗物12、14、16により通信された到達メッセージ32、34、36を検知する受信ユニット30と
を有する。
【0037】
送信ユニット20及び受信ユニット30は、
−受信/送信アンテナ23と、
−到達メッセージ32、34、36を処理することにより(特に到達メッセージ32、34、36の承認配列を処理することにより)、各乗物10、12、14、16の送信動作を制御する(すなわち、各乗物10、12、14、16がメッセージ32、34、36を再ブロードキャストするか否かを決定する)制御ユニット40(すなわちメッセージ配布制御ボックス)と
に接続されている。
【0038】
更に、制御ユニット40は、
−GPS(Global Positioning System)アンテナ62に割り当てられ、各乗物10、12、14、16の移動方向を決定して監視する位置測定ユニット60(すなわちGPS(Global Positioning System)ユニット)と、
−1つ以上の各乗物10、12、14、16について関係する(特に危険な)物体又は対象を検知する危険検知ユニット50と、
−到達メッセージ32、34、36を受信し、危険検知ユニット50により検知された対象又は物体を受信するように設計された受信ユニット70(すなわち表示ユニット)と
に接続されている。
【0039】
図2A、2B、2Cに、本発明による通信システム200の実施例が記載されている。メッセージ22、32、34、36は、乗物10、12、14、16により周囲に(再)ブロードキャストされ、各乗物10、12、14、16は、前述の通信装置100を有する。
【0040】
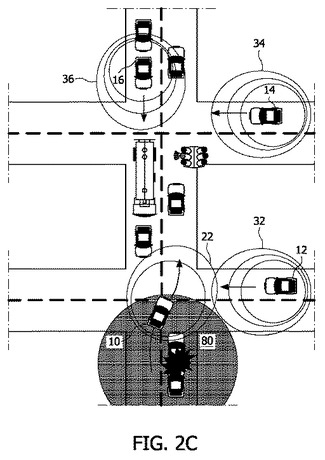
各メッセージ22、32、34、36は、受信した確認を指定する承認配列又は承認フィールド(いわゆる運転方向毎の承認)を有する。通信システム200は、
−メッセージ22が関係する地域80の周囲の全方向に配布されるまで(図2C参照)、及び/又は
−指定の有効範囲(例えば関係する地域80から3キロメートル)が終了するまで、及び/又は
−指定の有効時間(例えば30分)が終了するまで、
乗物10がメッセージ22を再ブロードキャストすることを確保する。
【0041】
乗物10、12、14、16は、メッセージ22、32、34、36の承認配列又は承認フィールドを検査し、メッセージ22、32、34、36が現在配布されている方向を見つける。その結果、乗物10、12、14、16は、特定の方向へのメッセージ22、32、34、36の配送の役目を引き継ぎ(図2C参照)、メッセージ22、32、34、36の承認配列の対応する承認ビットを1に設定することにより、これを示す。
【0042】
この役目を引き継いでメッセージ22、32、34、36を(再)ブロードキャストする乗物10、12、14、16は、配送ノードと呼ばれる。他の全ての乗物又はノードは(再)ブロードキャストする必要がなく、これによって、ネットワークの負荷をかなり低減する。運転方向は道路の湾曲に従うため、運転方向は時間で平均化される。この平均運転方向が変化すると、配送ノード10、12、14、16は、前の方向のメッセージ22、32、34、36の配送の役目を他の乗物に引き渡そうとする。
【0043】
図2Cは、特定の通信範囲で乗物対乗物通信機能を備えた4つの乗物10、12、14、16での交通事故の状況を示している。事故を検出して周囲に警告しようとしている乗物10は、複数回メッセージ22を再ブロードキャストしなければならないことは明らかである。この理由は、複数回再ブロードキャストしなければ、受信者が存在せずに、事故報告が失われることになるからである。
【0044】
無指向性の確立された配信アルゴリズムは、指向性承認のフィールドと共に、関係する地域80の地理的座標及び直径を示す警告メッセージ22を乗物10が(再)ブロードキャストすることを要求する。このときに、現在の方向は1に設定される。これは、メッセージのレイアウトが示されている以下の表から受け取られてもよい。
【0045】
【表1】
また、異なる発信元からのメッセージ22、32、34、36を区別するために、固有の発信元又はメッセージ識別子(メッセージのレイアウトで“発信元ID”のフィールド)が必要になる。メッセージ22、32、34、36を再ブロードキャストすることは、“指向性ACK”の承認フィールドを除いて、メッセージのフィールドが変更してはならないことを意味する。
【0046】
従って、メッセージ22、32、34、36のレイアウトの前記の表は、
−固有の発信元又はメッセージ識別子(“発信元ID”のフィールド)と、
−各メッセージ22、32、34、36が送信される乗物10、12、14、16の移動方向(“運転方向”のフィールド)と、
−関係する時間(“有効時間”のフィールド)と、
−位置測定(すなわち、局所領域の地理的座標及び大きさ又はサイズ(“有効範囲”のフィールド))と、
−位置測定(すなわち、関係する地域80の地理的座標及び大きさ又はサイズ(“関係地域、座標及びサイズ”のフィールド))と、
−承認配列(潜在的なエントリ“N(北)”、“E(東)”、“S(南)”、“W(西)”を有する“指向性ACK”のフィールド)と、
−イベントコード(“イベントコード”のフィールド)と
に関する情報を有する。
【0047】
ノード10が最後の期間に北に運転している場合(すなわち、平均運転方向が北である場合)、ノード10は、“指向性ACK:N(北)”を“1”に設定して、メッセージ22を生成する。その経路で、乗物10は、乗物10と反対方向に運転している乗物16に出会い、そこで、乗物16が“指向性ACK:N(北)=1”のフィールドを備えたメッセージ22を受信する。4つの指向性承認ビットのうちどれを設定するかを決定するために、到達メッセージ22、32、34、36を受信した後に(図3のステップ[ii]参照)、以下の条件を確認する必要がある。
[ii.a] 事故からの受信座標と実際の運転方向とを考慮に入れて、関係する地域80に入ったか否かを決定する(この例では、乗物14、16が近づいており、乗物10が関係する地域80から離れている)。
[i.a]平均運転方向を検査する。所望の分解能に応じて、この方向はN(北)、E(東)、S(南)、W(西)のうちの1つになるが、ACK(承認)フィールドに更なるビットが提供されている場合には、更に細かくなってもよい。
[ii.d]実際の運転方向のACK(承認)ビット値が依然として“0”である場合に、この乗物はこの方向の所有権を受け持ち、再ブロードキャストを開始する。図2Cの例では、乗物16が南方向の所有権を受け持ち、ACK(N(北)=1)及びACK(S(南)=1)で再ブロードキャストする。
[i.g]この方向の運転時間が監視され、この方向の平均運転時間が所定の閾値より下になると、この方向のACKの所有権が解放される。例えば、乗物12はW(西)方向の所有権を受け持つが、合流点でS(南)に曲がってもよい。
[iii.a]或る時間の後に、乗物12はW(西)の所有権を解放し、ACK(W(西)=0)で再ブロードキャストする。
[iii.b.1、iii.b.2、iii.a.1、iii.a.2]有効時間及び有効範囲が有効であるか否かを計算する。これは、GPS(Global Positioning System)又はブロードキャストされる原子時計を介して一般的に利用可能な全世界で同期した時間基準により実現され得る。有効範囲は、受信メッセージで提供される関係する座標の地域80からの実際の地理的距離を計算することにより検査される。
[iii.a、iii.b]何らかのACK(承認)ビットが依然として“0”に設定されている限り(すなわち、全ての方向が承認されていない場合)、有効範囲又は有効時間が終了するまで、乗物はメッセージを再ブロードキャストし続ける。
【0048】
図2Cに示す例で、乗物10が乗物12に最初に会うと、乗物10は、ACK(N(北)=1)で初期メッセージを引き継ぐ。その前方の対面から、乗物10及び12は、ACK(N(北)=1、W(西)=1)でブロードキャストする。乗物14はACK(W(西)=1)が既に設定されており、再ブロードキャストしないことを認識する。次に、乗物10は乗物16に会い、ACK(N(北)=1、S(南)=1、W(西)=1)でブロードキャストし続ける。図示の場面を離れると、乗物10、12、16がそれぞれの方向を変化しないことを仮定して、乗物10、12、16は、有効範囲及び有効時間が終了するまで再ブロードキャストする。
【0049】
以下では、本発明の方法に従って動作する通信装置100のいくつかの潜在的な拡張が開示されている。
−方向の再分割は更に細かくなってもよい(NE(北東)方向、SE(南東)方向等の指定)。
−方向毎に唯一の承認を集める代わりに、方向毎に1つより多くの承認を受信することは、メッセージ22、32、34、36が無指向的に広がる確率を増加させる。
−乗物が関係する地域80に近づいているという情報は、2つの配送ノードが同じ方向に進んでおり、一方の配送ノードが関連する地域80に近づいており、他方が関係する地域80を離れていることを設定するために使用され得る。
【0050】
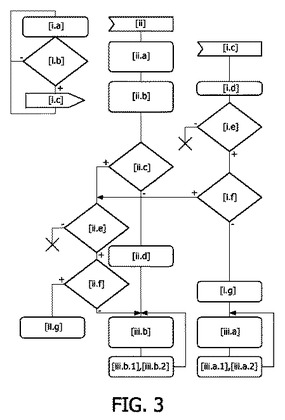
図3による方法は、同一のメッセージID(識別子)を備えた複数のメッセージが再ブロードキャストを通じて受信されることを仮定する。
【0051】
1つより多くの乗物が方向の所有者でもよく、このことは単に到達可能性を増加させる。
【0052】
メッセージID毎に、方向の所有権の状態、有効範囲、有効時間等が別々に格納されてもよい。警告メッセージの受信後に、メッセージの状態がメモリからロードされる(図3のステップ[ii.b]参照)。
【0053】
メッセージがメモリからロードされた後に(図3のステップ[ii.b]参照)、受信した承認がメッセージを受信した乗物の平均運転方向で設定されるか否かが決定される(図3のステップ[ii.c]参照)。乗物が平均期間の間に運転している方向は、その乗物の運転方向である。平均は、例えばコンパス情報に基づいて、少なくとも1つのタイマを用いて計算される。
【0054】
平均方向に変化が存在するか否かが監視される(図3のステップ[i.b]参照)。平均方向が変化する毎に(図3のステップ[i.c]参照)、メッセージが送信される必要があるか否かが検査され、所有権の状態が調べられる(図3のステップ[i.d]参照)。
【0055】
所有権の状態を調べるステップ[i.d]は、以下の“方向の所有権”の表を調べることを意味する。
【0056】
【表2】
従って、この方向の所有権の表は、
−少なくとも1つのメッセージ識別子(“メッセージID”の配列)と、
−所有権が乗物により引き継がれる方向(“方向”の配列)と、
−乗物が所有権を引き継いだ方向を解放しようとしているか否か(“解放要求”の配列)と
に関する情報を有する。
【0057】
これに関して、
−解放の所有権のステップ[i.g]は、方向の所有権の表の“解放要求”の配列で“yes”を入力することを意味する。
−自分の方向の所有権を引き継ぐステップ[ii.d]は、方向の所有権の表にエントリを追加することを意味する。
−ステップ[ii.e]で所有権が取り戻されることが決定されると、方向の所有権の表の“解放要求”の配列で“no”が入力される。
−ステップ[i.d]において、各乗物が何らかの方向領域の所有権を保持しているか否かが決定され(図3のステップ[i.e]参照)、ステップ[i.e]が真(図3で“+”)である場合、方向領域の所有権が各乗物により取り戻されるか否かが決定される(図3のステップ[i.f]参照)。所有権の状況に応じて、乗物はこの所有権を解放しようとしてもよい(図3のステップ[i.g]参照)。
−ステップ[ii.c]が真(図3で“+”)である場合、各乗物が各ノードの移動方向に関する方向領域で所有権を保持しているか否かが決定される(図3のステップ[ii.e]参照)。
−ステップ[ii.e]が真(図3で“+”)である場合、各乗物が各ノードの移動方向に関する方向領域で所有権を解放しようとしているか否かが決定される(図3のステップ[ii.f]参照)。
−ステップ[ii.f]が真(図3で“+”)である場合、各乗物は、各乗物の移動方向に関する方向領域の所有権を削除する(図3のステップ[ii.g]参照)。
−或いは、ステップ[ii.f]が真でない(図3で“-”)場合、各乗物はステップ[iii.b]に進む。
−所有権を削除するステップ[ii.g]は、方向の所有権の表でエントリをクリアすることを意味する。
−有効時間が終了した後、又は有効範囲が終了した後に、表のエントリがクリアされる。
【図面の簡単な説明】
【0058】
【図1】本発明の方法に従って動作する本発明による通信装置の実施例のブロック図
【図2A】危険が前方にある場合のノード間(=乗物間)通信の適用が例示されている本発明による通信システムの第1の実施例
【図2B】交差点に危険がある場合のノード間(=乗物間)通信の適用が例示されている本発明による通信システムの第2の実施例
【図2C】交差点に危険がある場合のノード間(=乗物間)通信の適用が例示されている本発明による通信システムの第3の実施例
【図3】本発明による方法を示すアルゴリズムのフローチャート
【符号の説明】
【0059】
100 通信装置
10 基準ノード又は各ノード(特に第1の配送ノード、例えば、第1の乗物)
12 第1の隣接ノード(特に第2の配送ノード、例えば第2の乗物)
14 第2の隣接ノード(特に第3の配送ノード、例えば第3の乗物)
16 第3の隣接ノード(特に第4の配送ノード、例えば第4の乗物)
20 送信ユニット(特に送信ブロック)
22 隣接ノード12、14、16に通信されるメッセージ
23 送信ユニット20及び受信ユニット30に割り当てられた送受信アンテナ
30 受信ユニット(特に受信ブロック)
32 第1の隣接ノード12により通信された到達メッセージ
34 第2の隣接ノード14により通信された到達メッセージ
36 第3の隣接ノード16により通信された到達メッセージ
40 制御ユニット(特にメッセージ配布制御ボックス)
50 危険検知ユニット
60 位置測定ユニット(特に位置決定装置、例えばGPSユニット)
62 位置測定ユニット60に割り当てられた位置決定アンテナ(特にGPSアンテナ)
70 記録ユニット(特に表示ユニット及び/又はスピーカユニット)
80 関連する地域
200 通信システム
【技術分野】
【0001】
本発明は、通信装置及び移動ノード間で(特に乗物間で)通信する方法に関し、各ノードは、
−移動方向及び/又は各ノードの現在位置を決定及び/又は監視し、
−少なくとも1つの隣接ノードにより通信される(特にブロードキャスト及び/又はマルチキャストされる)少なくとも1つの到達メッセージを検知し、
−少なくとも1つのメッセージを通信する(特にブロードキャスト及び/又はマルチキャスト)するように設計される。
【背景技術】
【0002】
Abdelmalik Bachir及びAbderrahim Benslimaneによる従来技術の文献“A Multicast Protocol in Ad hoc Networks Inter-Vehicle Geocast [Proceedings of 58th IEEE Vehicular Technology Conference, fall 2003, volume 57, issue 4, 2456〜2460ページ]”は、前述の技術分野に直接関連し、最新技術を要約している。この文献は、いわゆるIVG(Inter-Vehicle Geocast)アルゴリズムになるように既存のアルゴリズムを組み合わせ、低い市場浸透率の問題に対処している。
【0003】
この文献でBachir及びBenslimaneにより議論されているシナリオは、一方向の直線道路(例えば高速道路)に限定されている。一方向の直線道路では、重要な領域が基準の乗物の運転方向にあり、危険がある場合に、基準の乗物の後ろの全ての乗物が警告される必要がある。
【0004】
IVG(Inter-Vehicle Geocast)アルゴリズムは、いわゆる“中継(relay)”によってメッセージを再ブロードキャストすることに基づく。Bachir及びBenslimaneによる文献は、再ブロードキャストのタイミング制約に焦点を当てており、メッセージ発信元への計算距離に応じて、いわゆる専用タイマにより制御されるいわゆる“保留時間(defer time)”を規定する。
【0005】
Bachir及びBenslimaneによる文献によれば、受信メッセージ毎に、乗物はメッセージ発信元(例えば破損した乗物)に対してその位置を決定しなければならず、受信メッセージが関係あるか否かを定めなければならない。乗物が重要な領域に向かっている場合、且つメッセージが最初に受信された場合に、受信メッセージは関係がある。
【0006】
保留タイマが終了する前に乗物が同じ警告メッセージを受信した場合、同じ警告メッセージをブロードキャストしている他の乗物がその後ろに存在すると結論を出す。この状況で、乗物は第1の警告メッセージにより事故について既に通知を受けているため、第2の警告メッセージは関係ない。更に、この状況で、乗物の後ろに第2の警告メッセージの警告の配布を確保する中継が存在するため、第2の警告メッセージを再ブロードキャストすることは無益である。
【0007】
更に、Bachir及びBenslimaneによる文献によれば、保留タイマが終了した後に同一のメッセージが受信できない場合、ノードは、通知される最後のノードであると考え、メッセージを反復し始める。保留タイマの概念は、発信元領域から大きい距離を有するノードが警告メッセージを再ブロードキャストする最初のものであることを確保する。
【0008】
中継の乗物の後ろの他の乗物が警告メッセージを受信した場合、他の乗物は、保留時間アルゴリズムを実行し、タイマが終了したときに、他の乗物はこの警告メッセージを再ブロードキャストする。この時点で、中継ノードは同じ警告メッセージを受信し、他の乗物も中継局の役目を取り戻すため、定期的なブロードキャストを中止する。
【0009】
Bachir及びBenslimaneによる方法は、
−乗物の既知のGPS(Global Positioning System)位置及び
−乗物の方向
を情報として使用する。
【0010】
しかし、IVGの概念は承認の一種として他のノードからの同一のメッセージの受信を解釈するため、IVG(Inter-Vehicle Geocast)の概念の適用性は、一方向の道路トポロジに制限され、危険が常に道路の“前”にあることを仮定する。
【0011】
この従来技術以外に、文献US2004/0083035A1は、各乗物に設置されたブロードキャスト送信機及び受信機に基づいて、専用の緊急周波数を使用して衝突防止する警告メッセージシステムを記載している。しかし、メッセージのブロードキャスト及び承認についてのネットワーク機能は範囲外である。
【0012】
従来技術の文献US6720920B2は、乗物間で通信する方法及び構成を開示しており、
−GPS位置と利用可能な地図データとに基づいてメッセージの関連性を検査し、
−特定の乗物を指定して応答を待機し、様々な手段及び技術的な実装(例えば、IR(InfraRed)及びマイクロ波、再ブロードキャスト、固有の識別子に符号化された位置での雑音レーダ、様々なシステム要素を有するゼロ交通事故死亡者システム、乗物間通信等)を使用することが提案されている。
【0013】
更に、以下のように、前記の説明に合致する例示的な従来技術のシステムが開示されている。
−従来技術の文献US6370475B1は、車線離脱警告を有する事故防止システムを示している。
−従来技術の文献US6405132B1は、乗物間通信により受信した乗物の位置から衝突の確率を計算する事故防止システムを示している。
−従来技術の文献US2002/0105423A1は、ブレーキ情報が電子メッセージを用いて他の乗物に広がる反応優位性非衝突システムを示している。
−従来技術の文献US2003/0212567A1は、画像取得及び共有での証拠情報サービスを示している。緊急事態が発生すると、緊急信号が領域内の乗物にブロードキャストされ、直前の画像履歴と直後の画像履歴とを保存して送信する。
−M. Sunによる従来技術の文献“CPS-based message broadcast for adaptive inter-vehicle communications” [Proceedings of IEEE Vehicular Technology Conference, fall 2000, volume 6, 2685〜2692ページ; Boston (MA)]”
−M. Sun, W. Feng, T. H. Laiによる従来技術の文献“Location aided broadcast in wireless ad hoc networks” [Proceedings of IEEE GLOBECOM 2001, 2842〜2846ページ, San Antonio (TX)]
−Lars Wischhof, Andre Ebner及びHermann Rohlingによる従来技術の文献“Adaptive Broadcast for Travel and Traffic Information Distribution Based on Inter-Vehicle Communication” [Proceedings of IEEE Intelligent Vehicles Symposium 2003, June 9-11, Columbus (OH)]
−Michael B. Lachlanによる従来技術の文献“Adaptive Layered Data Structure for Inter-Vehicle Communication in Ad-hoc Networks” [Eighth International World Congress on Intelligent Transport Systems, September 2001, Sydney].
この従来技術以外に、Chun-Chuan Yang and Chao-Yu Chenによる文献“A Reachability-Guaranteed Approach for Reducing Broadcast Storms in Mobile Ad Hoc Networks” [Proceedings of 56th IEEE Vehicular Technology Conference, fall 2002, volume 2, 1036〜1040ページ]は、移動アドホックネットワークでブロードキャスト・ストームを低減する手法を開示している。この手法は、位置認識手段に基づいており、ネットワークの各ノードがGPSのような位置決定装置を備えなければならず、その隣接とハローメッセージで位置情報を交換する。
【0014】
しかし、ブロードキャスト・ストームを防止するために、Yang及びChenによる従来技術の文献によるノードは、最初にメッセージを受信した後に、メッセージを再ブロードキャストする前にランダムな数のタイムスロットを待機しなければならない。その時間の間に、ノードは他のノードからも同じメッセージを取得したか否かを監視する。この時点で、ノードは、メッセージを再ブロードキャストしていない全てのノードにメッセージを再ブロードキャストする。
【0015】
前述の全ての成果にもかかわらず、以下の問題が残る。
(i)前記の説明に合致するシステムの市場導入中に、装備された乗物の市場浸透率が比較的低く、ブロードキャストメッセージの受信機が利用可能でないという確率が高くなる。図2A及び2Bに示すように、ネットワークは以下のいずれかの理由で分断される。
−可変の乗物速度による短期の動的な問題(例えば間隔)の理由(図2A参照)、又は
−特定の道路トポロジ(例えば長い橋)及び/又は特定の都市のトポロジによる静的な問題の理由(図2B参照)
(ii)ブロードキャストは、何個の受信機が利用可能であるかがわからない特別の形式の通信である。従って、例えばポイント・ツー・ポイント通信用にWLAN(Wireless Local Area Network)標準IEEE802.11に規定された標準的な承認方法が適用できない。
(iii)各乗物が個々に警告メッセージを承認すると、周知のブロードキャスト・ストーム(S. Y. Niによる従来技術の文献“The Broadcast Storm Problem in Mobile Ad Hoc Network” [Proceedings of IEEE MOBICOM 1999, 151〜162ページ, Seattle (WA))は、全体のチャネルスループットの問題になる。
(iv)信号品質(例えばビット誤り率)が街路トポロジに強く関連し、ビルに覆われた領域は、見通し状況の道路及び高速道路に比べてかなり劣化したチャネル状況を有する。このことは、理想的な場合には、信号が道路及び高速道路に沿って指向性アンテナを使用して発信されるべきであることを意味する。
【0016】
このことは、ジオキャスト(geocast)ルーティングアルゴリズム(C. Maihofer, C. Cseh, W. Franz及びR. Eberhardtによる従来技術の文献“Performance evaluation of stored geocast” [Proceedings of IEEE 58th Vehicular Technology Conference, fall 2003, October 6〜9, volume 5, issue 4, 2901〜2905ページ]参照)、又はデジタル地図から得られたナビゲーションデータとの指向性アンテナビームの相互作用を必要とする。
【0017】
明らかに、このことはシステムの複雑性及びコストを増加させ、デジタルデータの精度及び可用性に直接関係する。
【発明の開示】
【発明が解決しようとする課題】
【0018】
前述の欠点及び短所から始まり、前述の従来技術を考慮に入れて、本発明の目的は、ノード間通信(特に乗物間通信)でブロードキャストメッセージの量を減少するように、技術分野に記載した種類の通信装置と、技術分野に記載した種類の方法とを開発することである。
【課題を解決するための手段】
【0019】
本発明の前記の目的は、請求項1の特徴を有する通信装置と、請求項7の特徴を有する方法とにより実現される。本発明の有利な実施例及び好適な改善は、それぞれの従属項に開示されている。
【0020】
本発明により、ブロードキャストメッセージの量が最小に保持され、共有媒体の全体の性能及び可用性を増加させ、その一方で、少なくとも1つの他のノード又は少なくとも1つの隣接ノードに対する少なくとも1つのメッセージ(特に少なくとも1つの警告メッセージ)の到達可能性を最適化する。このシステム及びこの装置を実装するために、ノードの移動方向及び隣接ノードの粗い位置以外に、他のデジタル地図情報が必要ないことが、当業者にわかる。
【0021】
基本的に、本発明は、移動アドホックネットワークで(特に乗物間通信に関して)信頼性のあるスケーラブルなブロードキャストを確保するという概念に基づく。これに関して、“信頼性のある”という用語は、必ずしも100%決定的であることを意味せず、メッセージ(特にノードから隣接ノード(特に近い周囲の様々なノード)に配布され、潜在的にインフラストラクチャ要素に配布される警告メッセージ)の確立された配信を示す。
【0022】
メッセージ受信が保証できないシナリオを考えると、メッセージの少なくとも1つの発信元は、何らかの形式の配信確認が受信されるまでメッセージを再ブロードキャストする必要がある。本発明の好ましい実施例によれば、通信装置は、関係するノード(すなわち、関係する地域にある隣接ノード)がメッセージのブロードキャスト(特に定期的なブロードキャスト)を中止し得るように、メッセージ発信元又はメッセージ送信者にフィードバックを提供するという意味で、信頼性のある少なくとも1つの制御ユニット(特に少なくとも1つのメッセージ配布機構)を有する。
【0023】
本発明は、ネットワークアドレスに依存せず、特に少なくとも1つのメッセージ処理アルゴリズムを用いて、メッセージが関係する地域(特にいわゆる“有効範囲(range to live)”)の各ノードに到達し、メッセージが関係する特定の時間(特にいわゆる“有効時間(time to live)”の間に存続し続けることを確保する。
【0024】
本発明の好ましい実施例によれば、メッセージが再ブロードキャストされることを何らかの方向に移動する少なくとも1つのノードが確保するアルゴリズムが提供される。このノードは、方向の所有者とも呼ばれ得る。
【0025】
このため、本発明の好ましい実施例によれば、各メッセージに承認フィールドを導入するメッセージ配布機構が定められ、承認フィールドは、メッセージが進む方向(例えばメッセージの伝搬方向)に関係する。メッセージの冗長を低減するため、特にノードがメッセージを定期的にブロードキャストするべきか否かを決定するために、承認フィールドの情報が使用され得る。
【0026】
方向の所有者は、所有された方向について承認ビットで各ブロードキャストメッセージにマークを付ける。更に、本発明の好ましい実施例によれば、ノード(特に隣接ノード)は、移動方向を監視して平均化し、その移動方向の承認ビットが設定されていないことを発見した場合に、方向の所有者になることができる。ノードが移動方向を変えると、所有権を解放することができ、他のノードがその方向の新しい所有者になり得ることが確保される。
【0027】
とりわけ欧州委員会e-safetyイニシアチブ(European Commission e-safety initiative)により要求される交通事故死亡者数を低減するために、本発明は、前述の少なくとも2つの通信装置を有する通信システムを提案し、
−通信装置のうち少なくとも1つは基準ノード又は各ノード(特に検討される車又は第1の配送ノード)に割り当てられ、
−通信装置のうち少なくとも1つは隣接ノード(特に隣接の車又は第2の配送ノード)に割り当てられる。
【0028】
通信システムは、センサ又は専用のインフラストラクチャセンサを備えた乗物が潜在的な危険(摩擦の減少、予想外の道路の障害物、後続の交通の安全に影響を与える衝突、又は交通渋滞の隠れた後尾等)を決定する道路警告システムとして実装され得る。メッセージ(特にこれらの警告メッセージ)は、潜在的に関係する地域を対象とした全てのノード(特に全ての乗物)が時間に遅れずに警告されるように、隣接を通じて何らかの無線通信方法(例えば、周知のWLAN標準IEEE802.11)を使用して伝搬され得る。メッセージは、小さい待ち時間を確保し、個々のノード(特に個々の乗物)を指定するオーバーヘッドを回避するようにブロードキャストされる。
【0029】
特に工夫した改良点によれば、本発明は、低い浸透のシナリオ又は大きい乗物間の間隔で車対車のメッセージを配布する無指向性ジオキャストアルゴリズムに基づき得る。
【0030】
本発明は、デジタル地図を使用せずに、ノード周囲でメッセージの確立された配信することにも一般的に適用可能である。このことは、最小数の承認での都市のシナリオにおいても、無指向性のフラッディング(flooding)を可能にする。有利には、ノード(特に中継ノード又は方向の所有者のノード若しくは配送ノード)が再ブロードキャストを中止する前に、複数の承認が集められる。
【0031】
最後に、本発明は、少なくとも1つのアドホックネットワーク(特に少なくとも1つのセンサネットワーク又は無線局所危険警告(例えば車対車通信))について、前述の少なくとも1つの通信装置の使用、及び/又は前述の少なくとも1つの通信システムの使用、及び/又は前述の方法の使用に関し、特に事故のない運転のために、例えば、
−車線変更又は合流措置の間の衝突を回避するために、及び
−目に見えない障害物(例えばはっきりしない物体又は影になった物体)を報告するために、
センサ装備の車は、協調して相互作用し、例えばリアルタイム交通更新の警告メッセージを配信する。
【0032】
代替のシナリオでは、車が消防車に対して自由に保持されるべき交差点に入るときに、本発明を用いて警告されてもよい。
【0033】
前述のように、有利に本発明の教示を具現及び改善する複数の選択肢が存在する。このため、それぞれ請求項1、請求項5及び請求項7による請求項に参照が行われる。本発明の更なる改善、特徴及び利点は、一例として好ましい実施例を参照して、また、添付図面を参照して、詳細に以下に説明される。
【発明を実施するための最良の形態】
【0034】
図1〜3の対応する部分について、同じ参照符号が使用される。
【0035】
図1は、移動ノード(すなわち乗物10、12、14、16(図2A、2B、2C参照))間で通信する通信装置100を示している。
【0036】
通信装置100は、
−メッセージ22を通信する(すなわちブロードキャスト及び再ブロードキャストする)送信ユニット20と、
−隣接の乗物12、14、16により通信された到達メッセージ32、34、36を検知する受信ユニット30と
を有する。
【0037】
送信ユニット20及び受信ユニット30は、
−受信/送信アンテナ23と、
−到達メッセージ32、34、36を処理することにより(特に到達メッセージ32、34、36の承認配列を処理することにより)、各乗物10、12、14、16の送信動作を制御する(すなわち、各乗物10、12、14、16がメッセージ32、34、36を再ブロードキャストするか否かを決定する)制御ユニット40(すなわちメッセージ配布制御ボックス)と
に接続されている。
【0038】
更に、制御ユニット40は、
−GPS(Global Positioning System)アンテナ62に割り当てられ、各乗物10、12、14、16の移動方向を決定して監視する位置測定ユニット60(すなわちGPS(Global Positioning System)ユニット)と、
−1つ以上の各乗物10、12、14、16について関係する(特に危険な)物体又は対象を検知する危険検知ユニット50と、
−到達メッセージ32、34、36を受信し、危険検知ユニット50により検知された対象又は物体を受信するように設計された受信ユニット70(すなわち表示ユニット)と
に接続されている。
【0039】
図2A、2B、2Cに、本発明による通信システム200の実施例が記載されている。メッセージ22、32、34、36は、乗物10、12、14、16により周囲に(再)ブロードキャストされ、各乗物10、12、14、16は、前述の通信装置100を有する。
【0040】
各メッセージ22、32、34、36は、受信した確認を指定する承認配列又は承認フィールド(いわゆる運転方向毎の承認)を有する。通信システム200は、
−メッセージ22が関係する地域80の周囲の全方向に配布されるまで(図2C参照)、及び/又は
−指定の有効範囲(例えば関係する地域80から3キロメートル)が終了するまで、及び/又は
−指定の有効時間(例えば30分)が終了するまで、
乗物10がメッセージ22を再ブロードキャストすることを確保する。
【0041】
乗物10、12、14、16は、メッセージ22、32、34、36の承認配列又は承認フィールドを検査し、メッセージ22、32、34、36が現在配布されている方向を見つける。その結果、乗物10、12、14、16は、特定の方向へのメッセージ22、32、34、36の配送の役目を引き継ぎ(図2C参照)、メッセージ22、32、34、36の承認配列の対応する承認ビットを1に設定することにより、これを示す。
【0042】
この役目を引き継いでメッセージ22、32、34、36を(再)ブロードキャストする乗物10、12、14、16は、配送ノードと呼ばれる。他の全ての乗物又はノードは(再)ブロードキャストする必要がなく、これによって、ネットワークの負荷をかなり低減する。運転方向は道路の湾曲に従うため、運転方向は時間で平均化される。この平均運転方向が変化すると、配送ノード10、12、14、16は、前の方向のメッセージ22、32、34、36の配送の役目を他の乗物に引き渡そうとする。
【0043】
図2Cは、特定の通信範囲で乗物対乗物通信機能を備えた4つの乗物10、12、14、16での交通事故の状況を示している。事故を検出して周囲に警告しようとしている乗物10は、複数回メッセージ22を再ブロードキャストしなければならないことは明らかである。この理由は、複数回再ブロードキャストしなければ、受信者が存在せずに、事故報告が失われることになるからである。
【0044】
無指向性の確立された配信アルゴリズムは、指向性承認のフィールドと共に、関係する地域80の地理的座標及び直径を示す警告メッセージ22を乗物10が(再)ブロードキャストすることを要求する。このときに、現在の方向は1に設定される。これは、メッセージのレイアウトが示されている以下の表から受け取られてもよい。
【0045】
【表1】
また、異なる発信元からのメッセージ22、32、34、36を区別するために、固有の発信元又はメッセージ識別子(メッセージのレイアウトで“発信元ID”のフィールド)が必要になる。メッセージ22、32、34、36を再ブロードキャストすることは、“指向性ACK”の承認フィールドを除いて、メッセージのフィールドが変更してはならないことを意味する。
【0046】
従って、メッセージ22、32、34、36のレイアウトの前記の表は、
−固有の発信元又はメッセージ識別子(“発信元ID”のフィールド)と、
−各メッセージ22、32、34、36が送信される乗物10、12、14、16の移動方向(“運転方向”のフィールド)と、
−関係する時間(“有効時間”のフィールド)と、
−位置測定(すなわち、局所領域の地理的座標及び大きさ又はサイズ(“有効範囲”のフィールド))と、
−位置測定(すなわち、関係する地域80の地理的座標及び大きさ又はサイズ(“関係地域、座標及びサイズ”のフィールド))と、
−承認配列(潜在的なエントリ“N(北)”、“E(東)”、“S(南)”、“W(西)”を有する“指向性ACK”のフィールド)と、
−イベントコード(“イベントコード”のフィールド)と
に関する情報を有する。
【0047】
ノード10が最後の期間に北に運転している場合(すなわち、平均運転方向が北である場合)、ノード10は、“指向性ACK:N(北)”を“1”に設定して、メッセージ22を生成する。その経路で、乗物10は、乗物10と反対方向に運転している乗物16に出会い、そこで、乗物16が“指向性ACK:N(北)=1”のフィールドを備えたメッセージ22を受信する。4つの指向性承認ビットのうちどれを設定するかを決定するために、到達メッセージ22、32、34、36を受信した後に(図3のステップ[ii]参照)、以下の条件を確認する必要がある。
[ii.a] 事故からの受信座標と実際の運転方向とを考慮に入れて、関係する地域80に入ったか否かを決定する(この例では、乗物14、16が近づいており、乗物10が関係する地域80から離れている)。
[i.a]平均運転方向を検査する。所望の分解能に応じて、この方向はN(北)、E(東)、S(南)、W(西)のうちの1つになるが、ACK(承認)フィールドに更なるビットが提供されている場合には、更に細かくなってもよい。
[ii.d]実際の運転方向のACK(承認)ビット値が依然として“0”である場合に、この乗物はこの方向の所有権を受け持ち、再ブロードキャストを開始する。図2Cの例では、乗物16が南方向の所有権を受け持ち、ACK(N(北)=1)及びACK(S(南)=1)で再ブロードキャストする。
[i.g]この方向の運転時間が監視され、この方向の平均運転時間が所定の閾値より下になると、この方向のACKの所有権が解放される。例えば、乗物12はW(西)方向の所有権を受け持つが、合流点でS(南)に曲がってもよい。
[iii.a]或る時間の後に、乗物12はW(西)の所有権を解放し、ACK(W(西)=0)で再ブロードキャストする。
[iii.b.1、iii.b.2、iii.a.1、iii.a.2]有効時間及び有効範囲が有効であるか否かを計算する。これは、GPS(Global Positioning System)又はブロードキャストされる原子時計を介して一般的に利用可能な全世界で同期した時間基準により実現され得る。有効範囲は、受信メッセージで提供される関係する座標の地域80からの実際の地理的距離を計算することにより検査される。
[iii.a、iii.b]何らかのACK(承認)ビットが依然として“0”に設定されている限り(すなわち、全ての方向が承認されていない場合)、有効範囲又は有効時間が終了するまで、乗物はメッセージを再ブロードキャストし続ける。
【0048】
図2Cに示す例で、乗物10が乗物12に最初に会うと、乗物10は、ACK(N(北)=1)で初期メッセージを引き継ぐ。その前方の対面から、乗物10及び12は、ACK(N(北)=1、W(西)=1)でブロードキャストする。乗物14はACK(W(西)=1)が既に設定されており、再ブロードキャストしないことを認識する。次に、乗物10は乗物16に会い、ACK(N(北)=1、S(南)=1、W(西)=1)でブロードキャストし続ける。図示の場面を離れると、乗物10、12、16がそれぞれの方向を変化しないことを仮定して、乗物10、12、16は、有効範囲及び有効時間が終了するまで再ブロードキャストする。
【0049】
以下では、本発明の方法に従って動作する通信装置100のいくつかの潜在的な拡張が開示されている。
−方向の再分割は更に細かくなってもよい(NE(北東)方向、SE(南東)方向等の指定)。
−方向毎に唯一の承認を集める代わりに、方向毎に1つより多くの承認を受信することは、メッセージ22、32、34、36が無指向的に広がる確率を増加させる。
−乗物が関係する地域80に近づいているという情報は、2つの配送ノードが同じ方向に進んでおり、一方の配送ノードが関連する地域80に近づいており、他方が関係する地域80を離れていることを設定するために使用され得る。
【0050】
図3による方法は、同一のメッセージID(識別子)を備えた複数のメッセージが再ブロードキャストを通じて受信されることを仮定する。
【0051】
1つより多くの乗物が方向の所有者でもよく、このことは単に到達可能性を増加させる。
【0052】
メッセージID毎に、方向の所有権の状態、有効範囲、有効時間等が別々に格納されてもよい。警告メッセージの受信後に、メッセージの状態がメモリからロードされる(図3のステップ[ii.b]参照)。
【0053】
メッセージがメモリからロードされた後に(図3のステップ[ii.b]参照)、受信した承認がメッセージを受信した乗物の平均運転方向で設定されるか否かが決定される(図3のステップ[ii.c]参照)。乗物が平均期間の間に運転している方向は、その乗物の運転方向である。平均は、例えばコンパス情報に基づいて、少なくとも1つのタイマを用いて計算される。
【0054】
平均方向に変化が存在するか否かが監視される(図3のステップ[i.b]参照)。平均方向が変化する毎に(図3のステップ[i.c]参照)、メッセージが送信される必要があるか否かが検査され、所有権の状態が調べられる(図3のステップ[i.d]参照)。
【0055】
所有権の状態を調べるステップ[i.d]は、以下の“方向の所有権”の表を調べることを意味する。
【0056】
【表2】
従って、この方向の所有権の表は、
−少なくとも1つのメッセージ識別子(“メッセージID”の配列)と、
−所有権が乗物により引き継がれる方向(“方向”の配列)と、
−乗物が所有権を引き継いだ方向を解放しようとしているか否か(“解放要求”の配列)と
に関する情報を有する。
【0057】
これに関して、
−解放の所有権のステップ[i.g]は、方向の所有権の表の“解放要求”の配列で“yes”を入力することを意味する。
−自分の方向の所有権を引き継ぐステップ[ii.d]は、方向の所有権の表にエントリを追加することを意味する。
−ステップ[ii.e]で所有権が取り戻されることが決定されると、方向の所有権の表の“解放要求”の配列で“no”が入力される。
−ステップ[i.d]において、各乗物が何らかの方向領域の所有権を保持しているか否かが決定され(図3のステップ[i.e]参照)、ステップ[i.e]が真(図3で“+”)である場合、方向領域の所有権が各乗物により取り戻されるか否かが決定される(図3のステップ[i.f]参照)。所有権の状況に応じて、乗物はこの所有権を解放しようとしてもよい(図3のステップ[i.g]参照)。
−ステップ[ii.c]が真(図3で“+”)である場合、各乗物が各ノードの移動方向に関する方向領域で所有権を保持しているか否かが決定される(図3のステップ[ii.e]参照)。
−ステップ[ii.e]が真(図3で“+”)である場合、各乗物が各ノードの移動方向に関する方向領域で所有権を解放しようとしているか否かが決定される(図3のステップ[ii.f]参照)。
−ステップ[ii.f]が真(図3で“+”)である場合、各乗物は、各乗物の移動方向に関する方向領域の所有権を削除する(図3のステップ[ii.g]参照)。
−或いは、ステップ[ii.f]が真でない(図3で“-”)場合、各乗物はステップ[iii.b]に進む。
−所有権を削除するステップ[ii.g]は、方向の所有権の表でエントリをクリアすることを意味する。
−有効時間が終了した後、又は有効範囲が終了した後に、表のエントリがクリアされる。
【図面の簡単な説明】
【0058】
【図1】本発明の方法に従って動作する本発明による通信装置の実施例のブロック図
【図2A】危険が前方にある場合のノード間(=乗物間)通信の適用が例示されている本発明による通信システムの第1の実施例
【図2B】交差点に危険がある場合のノード間(=乗物間)通信の適用が例示されている本発明による通信システムの第2の実施例
【図2C】交差点に危険がある場合のノード間(=乗物間)通信の適用が例示されている本発明による通信システムの第3の実施例
【図3】本発明による方法を示すアルゴリズムのフローチャート
【符号の説明】
【0059】
100 通信装置
10 基準ノード又は各ノード(特に第1の配送ノード、例えば、第1の乗物)
12 第1の隣接ノード(特に第2の配送ノード、例えば第2の乗物)
14 第2の隣接ノード(特に第3の配送ノード、例えば第3の乗物)
16 第3の隣接ノード(特に第4の配送ノード、例えば第4の乗物)
20 送信ユニット(特に送信ブロック)
22 隣接ノード12、14、16に通信されるメッセージ
23 送信ユニット20及び受信ユニット30に割り当てられた送受信アンテナ
30 受信ユニット(特に受信ブロック)
32 第1の隣接ノード12により通信された到達メッセージ
34 第2の隣接ノード14により通信された到達メッセージ
36 第3の隣接ノード16により通信された到達メッセージ
40 制御ユニット(特にメッセージ配布制御ボックス)
50 危険検知ユニット
60 位置測定ユニット(特に位置決定装置、例えばGPSユニット)
62 位置測定ユニット60に割り当てられた位置決定アンテナ(特にGPSアンテナ)
70 記録ユニット(特に表示ユニット及び/又はスピーカユニット)
80 関連する地域
200 通信システム
【特許請求の範囲】
【請求項1】
移動ノード間、特に乗物間で通信する通信装置であって、
−少なくとも1つのメッセージを通信する、特にブロードキャスト及び/又は再ブロードキャストする少なくとも1つの送信ユニット、特に少なくとも1つの送信ブロックと、
−少なくとも1つの隣接ノードにより通信された少なくとも1つの到達メッセージを検知する少なくとも1つの受信ユニット、特に少なくとも1つの受信ブロックと、
−移動方向、特に平均移動方向及び/又は各ノードの現在位置を決定及び/又は監視する少なくとも1つの位置測定ユニット、特に少なくとも1つの位置決定装置、例えば少なくとも1つのGPSユニットと
を有し、
−前記ノード間で通信される各メッセージは、
−−特に少なくとも1つのイベントコードを用いて少なくとも1つのメッセージ形式及び/又はメッセージ対象と、
−−各メッセージが送信される前記ノードの移動方向に関する少なくとも1つの方向領域、例えば北、東、南又は西と
に割り当てられ、
前記移動方向は、前記各ノードの前記位置測定ユニットにより決定及び/又は監視され、
−−同じメッセージ形式及び/又はメッセージ対象に割り当てられ、
−−−関係する少なくとも1つの地域の周囲の特定の局所領域内で、特に所定の有効範囲内で、及び/又は
−−−関係する特定の時間内で、特に所定の有効時間内で
通信されるメッセージ、特に全てのメッセージの各方向領域に関する少なくとも1つの情報を有する承認配列、特に少なくとも1つの承認フィールドを有することを特徴とする通信装置。
【請求項2】
前記メッセージのレイアウトは、
−少なくとも1つの固有の発信元、及び/又は
−少なくとも1つのメッセージ識別コード、及び/又は
−各メッセージが送信される前記ノードの移動方向、及び/又は
−関係する時間、及び/又は
−位置測定、特に局所領域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−位置測定、特に関係する地域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−承認配列、及び/又は
−メッセージ形式及び/又はメッセージ対象
に関する情報を有することを特徴とする請求項1に記載の通信装置。
【請求項3】
各ノードは、前記到達メッセージの少なくとも一部を処理することにより、特に前記承認フィールドを処理することにより、各ノードの送信動作を制御する、特に各ノードが前記メッセージをブロードキャストするか否かを決定する少なくとも1つの制御ユニット、特に少なくとも1つのメッセージ配布制御ボックスを有することを特徴とする請求項1又は2に記載の通信装置。
【請求項4】
前記制御ユニットは、
−前記各メッセージが格納されている少なくとも1つのリスト又は表を有し、
−−前記各ノードに関係する、特に危険な少なくとも1つの物体又は少なくとも1つの対象を検知するように設計された少なくとも1つの危険検知ユニット、及び/又は
−−前記到達メッセージ、及び/又は前記危険検知ユニットにより検知された前記物体及び/又は対象を記録するように設計された少なくとも1つの記録ユニット、特に少なくとも1つの表示ユニット及び/又は少なくとも1つのスピーカユニット
−に接続されることを特徴とする請求項3に記載の通信装置。
【請求項5】
移動ノード間、特に乗物間で通信する通信システムであって、
請求項1ないし4のうちいずれか1項に記載の少なくとも2つの通信装置を特徴とし、
−前記通信装置のうち少なくとも1つは、基準ノード又は各ノード、特に検討される車に割り当てられ、
−前記通信装置のうち少なくとも1つは、前記隣接ノード、特に隣接の車に割り当てられることを特徴とする通信システム。
【請求項6】
−前記ノードのうち少なくとも1つは、前記ノードの移動方向に関する方向領域の所有権を受け持ち、特に、前記メッセージが前記ノードの移動方向に関する方向領域に再ブロードキャストされることを確保し、及び/又は
−前記メッセージが関係する地域の局所領域の全ての方向領域で配布されるまで、前記メッセージが再ブロードキャストされることを特徴とする請求項5に記載の通信システム。
【請求項7】
移動ノード間、特に乗物間で通信する方法であって、
各ノードは、
[i]各ノードの移動方向及び/又は現在位置を決定及び/又は監視し、特に
[i.a]平均移動方向を決定し、
[i.b]前記各ノードの前記平均移動方向に変化が存在するか否かを決定及び/又は監視し、
[ii]少なくとも1つの隣接ノードにより通信される、特にブロードキャスト及び/又は再ブロードキャストされる少なくとも1つの到達メッセージを受信し、
[iii]少なくとも1つのメッセージを通信し、特にブロードキャスト及び/又は再ブロードキャストするように設計され、
−前記ノード間で通信される各メッセージは、
−−特に少なくとも1つのイベントコードを用いて少なくとも1つのメッセージ形式及び/又はメッセージ対象と、
−−各メッセージが送信される前記ノードの移動方向に関する少なくとも1つの方向領域、例えば北、東、南又は西と
に割り当てられ、
−−同じメッセージ形式及び/又はメッセージ対象に割り当てられ、
−−−関係する少なくとも1つの地域の周囲の特定の局所領域内で、特に所定の有効範囲内で、及び/又は
−−−関係する特定の時間内で、特に所定の有効時間内で
通信されるメッセージ、特に全てのメッセージの各方向領域に関する少なくとも1つの情報を有する承認配列、特に少なくとも1つの承認フィールドを有することを特徴とする方法。
【請求項8】
−前記到達メッセージの少なくとも一部を処理することにより、特に前記承認フィールドを処理することにより、各ノードが前記メッセージをブロードキャストするか否かを決定すること、及び/又は
−前記メッセージが関係する地域の局所領域の全ての方向領域で配布されるまで、前記メッセージを再ブロードキャストすること
を特徴とする請求項7に記載の方法。
【請求項9】
−特に少なくとも1つの物体又は少なくとも1つの対象が関係する、特に危険であると検知した後に、及び/又は
−特に前記到達メッセージを受信した後に、
[ii.d]前記ノードのうち少なくとも1つは、前記ノードの移動方向に関する方向領域の所有権を受け持ち、特に、前記メッセージが前記ノードの移動方向に関する方向領域に再ブロードキャストされることを確保することを特徴とする請求項7又は8に記載の方法。
【請求項10】
[i.c]方向の変化の場合に、
[i.d] 少なくとも1つの方向の所有権のリスト又は方向の所有権の表は、
−少なくとも1つの固有の発信元、及び/又は
−少なくとも1つのメッセージ識別コード、及び/又は
−各メッセージが送信される前記ノードの移動方向、及び/又は
−前記メッセージを解放する要求
に関する情報を有し、及び/又は
[i.e]各ノードが何らかの方向領域の所有権を保持するか否かが決定され、
[i.f]ステップ[i.e]が真である場合に、前記方向領域の所有権が前記各ノードにより取り戻されるか否かが決定され、
[i.g]ステップ[i.f]が真でない場合に、前記方向領域の所有権が解放され、及び/又は
[iii.a.1]関係する地域の周囲の特定の局所領域が残るまで、及び/又は
[iii.a.2]関係する特定の時間が終了するまで、特に前記メッセージがステップ[i.g]で解放された方向領域が前記ノードのうち少なくとも1つにより所有されていないという情報を有するまで、
[iii.a]前記メッセージが再ブロードキャストされることを特徴とする請求項7ないし9のうちいずれか1項に記載の方法。
【請求項11】
少なくとも1つの到達メッセージを受信するステップ[ii]で、
[ii.a]特に前記受信した到達メッセージの少なくとも一部を処理し、決定及び/又は監視された移動方向を考慮することにより、各ノードが関係する地域に入ったか否かが決定され、各ノードが関係する地域に入った場合、各ノードの運転手が警告を受け、及び/又は
[ii.b]到達メッセージの情報、特に
−少なくとも1つの固有の発信元、及び/又は
−少なくとも1つのメッセージ識別子、及び/又は
−各メッセージが送信される前記ノードの移動方向、及び/又は
−関係する時間、及び/又は
−位置測定、特に局所領域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−位置測定、特に関係する地域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−承認配列、及び/又は
−メッセージ形式及び/又はメッセージ対象
が格納及び/又は監視され、及び/又は
[ii.c]各ノードの移動方向に関する方向領域の所有権が前記ノードのうち少なくとも1つにより引き継がれているか否かが決定され、
[ii.d]ステップ[ii.c]が真でない場合に、各ノードの移動方向に関する方向領域の所有権が各ノードにより引き継がれ、
[iii.b.1]関係する地域の周囲の特定の局所領域が残るまで、及び/又は
[iii.b.2]関係する特定の時間が終了するまで、特に前記メッセージがステップ[ii.d]で引き継がれた方向領域が前記ノードのうち少なくとも1つにより所有されているという情報を有するまで、
[iii.b]前記メッセージが再ブロードキャストされ、
[ii.e]ステップ[ii.c]が真である場合に、各ノードが各ノードの移動方向に関する方向領域の所有権を保持しているか否かが決定され、
[ii.f]ステップ[ii.e]が真である場合に、各ノードが各ノードの移動方向に関する方向領域の所有権を解放しようとしているか否かが決定され、
[ii.g]ステップ[ii.f]が真である場合に、各ノードは各ノードの移動方向に関する方向領域の所有権を削除し、又はステップ[ii.f]が真でない場合に、各ノードはステップ[iii.b]に進むことを特徴とする請求項7ないし10のうちいずれか1項に記載の方法。
【請求項12】
少なくとも1つの無線アドホックネットワーク、特に少なくとも1つのセンサネットワーク又は無線局所危険警告、例えば車対車通信のための、請求項1ないし4のうち少なくとも1項に記載の少なくとも1つの通信装置、及び/又は請求項5又は6に記載の少なくとも1つの通信システム、及び/又は請求項7ないし11のうち少なくとも1項に記載の方法の使用法であって、
特に事故のない運転のために、例えば、
−車線変更又は合流措置の間の衝突を回避するために、及び
−目に見えない障害物、例えばはっきりしない物体又は影になった物体を報告するために、
センサ装備の車は、協調して相互作用し、例えばリアルタイム交通更新の警告メッセージを配信する使用法。
【請求項1】
移動ノード間、特に乗物間で通信する通信装置であって、
−少なくとも1つのメッセージを通信する、特にブロードキャスト及び/又は再ブロードキャストする少なくとも1つの送信ユニット、特に少なくとも1つの送信ブロックと、
−少なくとも1つの隣接ノードにより通信された少なくとも1つの到達メッセージを検知する少なくとも1つの受信ユニット、特に少なくとも1つの受信ブロックと、
−移動方向、特に平均移動方向及び/又は各ノードの現在位置を決定及び/又は監視する少なくとも1つの位置測定ユニット、特に少なくとも1つの位置決定装置、例えば少なくとも1つのGPSユニットと
を有し、
−前記ノード間で通信される各メッセージは、
−−特に少なくとも1つのイベントコードを用いて少なくとも1つのメッセージ形式及び/又はメッセージ対象と、
−−各メッセージが送信される前記ノードの移動方向に関する少なくとも1つの方向領域、例えば北、東、南又は西と
に割り当てられ、
前記移動方向は、前記各ノードの前記位置測定ユニットにより決定及び/又は監視され、
−−同じメッセージ形式及び/又はメッセージ対象に割り当てられ、
−−−関係する少なくとも1つの地域の周囲の特定の局所領域内で、特に所定の有効範囲内で、及び/又は
−−−関係する特定の時間内で、特に所定の有効時間内で
通信されるメッセージ、特に全てのメッセージの各方向領域に関する少なくとも1つの情報を有する承認配列、特に少なくとも1つの承認フィールドを有することを特徴とする通信装置。
【請求項2】
前記メッセージのレイアウトは、
−少なくとも1つの固有の発信元、及び/又は
−少なくとも1つのメッセージ識別コード、及び/又は
−各メッセージが送信される前記ノードの移動方向、及び/又は
−関係する時間、及び/又は
−位置測定、特に局所領域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−位置測定、特に関係する地域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−承認配列、及び/又は
−メッセージ形式及び/又はメッセージ対象
に関する情報を有することを特徴とする請求項1に記載の通信装置。
【請求項3】
各ノードは、前記到達メッセージの少なくとも一部を処理することにより、特に前記承認フィールドを処理することにより、各ノードの送信動作を制御する、特に各ノードが前記メッセージをブロードキャストするか否かを決定する少なくとも1つの制御ユニット、特に少なくとも1つのメッセージ配布制御ボックスを有することを特徴とする請求項1又は2に記載の通信装置。
【請求項4】
前記制御ユニットは、
−前記各メッセージが格納されている少なくとも1つのリスト又は表を有し、
−−前記各ノードに関係する、特に危険な少なくとも1つの物体又は少なくとも1つの対象を検知するように設計された少なくとも1つの危険検知ユニット、及び/又は
−−前記到達メッセージ、及び/又は前記危険検知ユニットにより検知された前記物体及び/又は対象を記録するように設計された少なくとも1つの記録ユニット、特に少なくとも1つの表示ユニット及び/又は少なくとも1つのスピーカユニット
−に接続されることを特徴とする請求項3に記載の通信装置。
【請求項5】
移動ノード間、特に乗物間で通信する通信システムであって、
請求項1ないし4のうちいずれか1項に記載の少なくとも2つの通信装置を特徴とし、
−前記通信装置のうち少なくとも1つは、基準ノード又は各ノード、特に検討される車に割り当てられ、
−前記通信装置のうち少なくとも1つは、前記隣接ノード、特に隣接の車に割り当てられることを特徴とする通信システム。
【請求項6】
−前記ノードのうち少なくとも1つは、前記ノードの移動方向に関する方向領域の所有権を受け持ち、特に、前記メッセージが前記ノードの移動方向に関する方向領域に再ブロードキャストされることを確保し、及び/又は
−前記メッセージが関係する地域の局所領域の全ての方向領域で配布されるまで、前記メッセージが再ブロードキャストされることを特徴とする請求項5に記載の通信システム。
【請求項7】
移動ノード間、特に乗物間で通信する方法であって、
各ノードは、
[i]各ノードの移動方向及び/又は現在位置を決定及び/又は監視し、特に
[i.a]平均移動方向を決定し、
[i.b]前記各ノードの前記平均移動方向に変化が存在するか否かを決定及び/又は監視し、
[ii]少なくとも1つの隣接ノードにより通信される、特にブロードキャスト及び/又は再ブロードキャストされる少なくとも1つの到達メッセージを受信し、
[iii]少なくとも1つのメッセージを通信し、特にブロードキャスト及び/又は再ブロードキャストするように設計され、
−前記ノード間で通信される各メッセージは、
−−特に少なくとも1つのイベントコードを用いて少なくとも1つのメッセージ形式及び/又はメッセージ対象と、
−−各メッセージが送信される前記ノードの移動方向に関する少なくとも1つの方向領域、例えば北、東、南又は西と
に割り当てられ、
−−同じメッセージ形式及び/又はメッセージ対象に割り当てられ、
−−−関係する少なくとも1つの地域の周囲の特定の局所領域内で、特に所定の有効範囲内で、及び/又は
−−−関係する特定の時間内で、特に所定の有効時間内で
通信されるメッセージ、特に全てのメッセージの各方向領域に関する少なくとも1つの情報を有する承認配列、特に少なくとも1つの承認フィールドを有することを特徴とする方法。
【請求項8】
−前記到達メッセージの少なくとも一部を処理することにより、特に前記承認フィールドを処理することにより、各ノードが前記メッセージをブロードキャストするか否かを決定すること、及び/又は
−前記メッセージが関係する地域の局所領域の全ての方向領域で配布されるまで、前記メッセージを再ブロードキャストすること
を特徴とする請求項7に記載の方法。
【請求項9】
−特に少なくとも1つの物体又は少なくとも1つの対象が関係する、特に危険であると検知した後に、及び/又は
−特に前記到達メッセージを受信した後に、
[ii.d]前記ノードのうち少なくとも1つは、前記ノードの移動方向に関する方向領域の所有権を受け持ち、特に、前記メッセージが前記ノードの移動方向に関する方向領域に再ブロードキャストされることを確保することを特徴とする請求項7又は8に記載の方法。
【請求項10】
[i.c]方向の変化の場合に、
[i.d] 少なくとも1つの方向の所有権のリスト又は方向の所有権の表は、
−少なくとも1つの固有の発信元、及び/又は
−少なくとも1つのメッセージ識別コード、及び/又は
−各メッセージが送信される前記ノードの移動方向、及び/又は
−前記メッセージを解放する要求
に関する情報を有し、及び/又は
[i.e]各ノードが何らかの方向領域の所有権を保持するか否かが決定され、
[i.f]ステップ[i.e]が真である場合に、前記方向領域の所有権が前記各ノードにより取り戻されるか否かが決定され、
[i.g]ステップ[i.f]が真でない場合に、前記方向領域の所有権が解放され、及び/又は
[iii.a.1]関係する地域の周囲の特定の局所領域が残るまで、及び/又は
[iii.a.2]関係する特定の時間が終了するまで、特に前記メッセージがステップ[i.g]で解放された方向領域が前記ノードのうち少なくとも1つにより所有されていないという情報を有するまで、
[iii.a]前記メッセージが再ブロードキャストされることを特徴とする請求項7ないし9のうちいずれか1項に記載の方法。
【請求項11】
少なくとも1つの到達メッセージを受信するステップ[ii]で、
[ii.a]特に前記受信した到達メッセージの少なくとも一部を処理し、決定及び/又は監視された移動方向を考慮することにより、各ノードが関係する地域に入ったか否かが決定され、各ノードが関係する地域に入った場合、各ノードの運転手が警告を受け、及び/又は
[ii.b]到達メッセージの情報、特に
−少なくとも1つの固有の発信元、及び/又は
−少なくとも1つのメッセージ識別子、及び/又は
−各メッセージが送信される前記ノードの移動方向、及び/又は
−関係する時間、及び/又は
−位置測定、特に局所領域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−位置測定、特に関係する地域の地理的座標及び/又は大きさ若しくはサイズ、及び/又は
−承認配列、及び/又は
−メッセージ形式及び/又はメッセージ対象
が格納及び/又は監視され、及び/又は
[ii.c]各ノードの移動方向に関する方向領域の所有権が前記ノードのうち少なくとも1つにより引き継がれているか否かが決定され、
[ii.d]ステップ[ii.c]が真でない場合に、各ノードの移動方向に関する方向領域の所有権が各ノードにより引き継がれ、
[iii.b.1]関係する地域の周囲の特定の局所領域が残るまで、及び/又は
[iii.b.2]関係する特定の時間が終了するまで、特に前記メッセージがステップ[ii.d]で引き継がれた方向領域が前記ノードのうち少なくとも1つにより所有されているという情報を有するまで、
[iii.b]前記メッセージが再ブロードキャストされ、
[ii.e]ステップ[ii.c]が真である場合に、各ノードが各ノードの移動方向に関する方向領域の所有権を保持しているか否かが決定され、
[ii.f]ステップ[ii.e]が真である場合に、各ノードが各ノードの移動方向に関する方向領域の所有権を解放しようとしているか否かが決定され、
[ii.g]ステップ[ii.f]が真である場合に、各ノードは各ノードの移動方向に関する方向領域の所有権を削除し、又はステップ[ii.f]が真でない場合に、各ノードはステップ[iii.b]に進むことを特徴とする請求項7ないし10のうちいずれか1項に記載の方法。
【請求項12】
少なくとも1つの無線アドホックネットワーク、特に少なくとも1つのセンサネットワーク又は無線局所危険警告、例えば車対車通信のための、請求項1ないし4のうち少なくとも1項に記載の少なくとも1つの通信装置、及び/又は請求項5又は6に記載の少なくとも1つの通信システム、及び/又は請求項7ないし11のうち少なくとも1項に記載の方法の使用法であって、
特に事故のない運転のために、例えば、
−車線変更又は合流措置の間の衝突を回避するために、及び
−目に見えない障害物、例えばはっきりしない物体又は影になった物体を報告するために、
センサ装備の車は、協調して相互作用し、例えばリアルタイム交通更新の警告メッセージを配信する使用法。
【図1】

【図2A】
【図2B】
【図2C】
【図3】
【図2A】
【図2B】
【図2C】
【図3】
【公表番号】特表2008−527824(P2008−527824A)
【公表日】平成20年7月24日(2008.7.24)
【国際特許分類】
【出願番号】特願2007−549967(P2007−549967)
【出願日】平成17年12月19日(2005.12.19)
【国際出願番号】PCT/IB2005/054303
【国際公開番号】WO2006/072850
【国際公開日】平成18年7月13日(2006.7.13)
【出願人】(590000248)コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ (12,071)
【Fターム(参考)】
【公表日】平成20年7月24日(2008.7.24)
【国際特許分類】
【出願日】平成17年12月19日(2005.12.19)
【国際出願番号】PCT/IB2005/054303
【国際公開番号】WO2006/072850
【国際公開日】平成18年7月13日(2006.7.13)
【出願人】(590000248)コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ (12,071)
【Fターム(参考)】
[ Back to top ]