
Fターム[2C150EG12]の内容
玩具 (16,863) | 推進(主に空中、水上、水中での推進) (181) | 推進手段に関するもの (161) | 反動を利用 (81) | 動く足又は腕(翼、尾を含む) (51)
Fターム[2C150EG12]の下位に属するFターム
Fターム[2C150EG12]に分類される特許
1 - 20 / 28
ハチドリ型羽ばたき飛翔ロボット
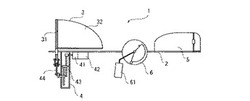
【課題】より空気力の損失を少なく、また正確かつ安定的な飛行が可能となるハチドリ型羽ばたき飛翔ロボットを提供する。
【解決手段】ハチドリ型羽ばたき飛翔ロボット1は、本体部材2と、この本体部材2に配置される複数の主翼部材3と、この主翼部材3を駆動する主翼駆動部材4、尾翼部材5及び重り61を有しこの重り61の移動を行う重り移動部材6と、を有することを特徴とする。なおこの場合において、重り移動部材6は、主翼部材3と、尾翼部材5の間に配置されていることが好ましい。
(もっと読む)
羽ばたき装置

【課題】構成要素が少ない小型軽量の羽ばたき装置を提供すること。
【解決手段】基部1と、基部1の左側及び右側に設けられた少なくとも一対の翼部10a、10bとを有する羽ばたき装置であって、一対の翼部10a、10bの少なくともいずれか一方について、一端部が基部1に関節4aを介して回動可能に設けられた翼軸3aと、翼軸3aの他端部に配設された羽2aと、一方端側が翼軸3aの外周に接続され他方端側が基部1に接続されている、伸縮可能な複数のリニアアクチュエータ5a、5bと、を有し、リニアアクチュエータ5a、5bの少なくとも一つは翼軸3aを軸回りに回動させる回動用リニアアクチュエータである。
(もっと読む)
羽ばたき飛行装置
【課題】トンボのように複数対の左右の羽体を羽ばたかせながら、体軸のブレが少なく安定して飛行することができる飛行装置を提供すること。
【解決手段】前後に長い支持本体に、上下揺動可能に支持される左右の羽体を複数対設け、各羽体を駆動するための駆動手段を設けてなる羽ばたき飛行装置であって、全重量と前記羽体の面積との比が0.357m2/N以下であり、前記羽体が弾性軸部材と薄膜羽部からなり、前後の羽体の間に段差が設けられていることを特徴とする安定な飛行を可能としている。
(もっと読む)
羽ばたき型小型飛翔体
【課題】上下方向及び/又は左右方向の飛行を制御することができる羽ばたき型小型飛翔体を提供すること、及び前記の動きに加えて、水平飛行及びホバリングなどの飛行タイプを調整することができる羽ばたき型小型飛翔体を提供すること。
【解決手段】前後に長い支持本体に、上下揺動可能に支持される左右の羽体を前後方向に単又は複数設けてなる羽ばたき型小型飛翔体であって、前記支持本体の中央部付近に、電磁力により前後方向に移動する第1アクチュエータ及び/又は横方向に移動する第2アクチュエータが取り付けられ、第1及び第2アクチュエータには錘が接続されており、前記第1アクチュエータが前後方向に移動するにともなって前記錘が前記羽ばたき型小型飛翔体の前後方向及び/又は左右方向に偏るように調整することで上下、左右の方向への飛行を可能としている。
(もっと読む)
動力伝達機構及びこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを水中での推進力を得るロボットとしとして提供する。
【解決手段】回転軸5a,5b,5cには、第1の揺動板8が等間隔で配され、この第1の揺動板8が回転軸5a,5b,5cに対する傾斜角度は同じで、回転軸5a,5b,5cに対する取り付け方向(「位相」)が順に規則的にずれて配されている。
(もっと読む)
動力伝達機構およびこの動力伝達機構を使用したロボット
【課題】多数のカムやギヤ等を連結しなくとも、回転軸への揺動板の取り付け方により、回転軸の駆動を特殊な揺動運動に変換する動力伝達機構と、これを多足歩行の玩具等に適用した駆動力推進構造体として提供する。
【解決手段】回転軸5には、第1の揺動板8が等間隔で複数配され、この複数の第1の揺動板8が回転軸5に対する傾斜角度θ1は同じで、回転軸5に対する取り付け方向(「位相」)が順に規則的にずれて配されている。図1は、ムカデのような多足歩行玩具として、上記動力伝達機構D1を有する駆動力推進構造体(多足歩行の玩具)1に適用した例である。
(もっと読む)
羽ばたき飛行機
【課題】 対気速度0からの飛び立ちが可能な小型、軽量の羽ばたき飛行機を提供する。
【解決手段】 羽ばたき飛行機は、前後方向に延びる機体11と、この機体11の左右に揺動自在に取り付けられる一対の翼12と、この翼12の打ち上げ・打ち下ろしの羽ばたき運動を実現させる羽ばたき機構13とを備える。その重心Aは翼12の揚力中心Bより後方に配置される。それによって、打ち下ろし時に翼12の上面方向にかかる翼反力により機体11にピッチ角αの正方向の回転モーメントMを生じさせてピッチ角αを大きくさせつつ上昇し、打ち上げ時に翼12の下面方向にかかる翼反力により機体にピッチ角αの負方向の回転モーメントMを生じさせてピッチ角αを小さくしつつ前進するように、羽ばたき周期とピッチ角αの振動周期との同期をとるよう設定される。
(もっと読む)
羽ばたき浮上移動装置
【課題】ユーザが容易に交換することができる羽部を備えた羽ばたき浮上移動装置を提供する。
【解決手段】アクチュエータ2は、上部超音波モータ21および下部超音波モータ22を備えている。上部超音波モータ21は、上部プレート231を駆動する。下部超音波モータ22は、下部プレート232を駆動する。上部プレート231には、羽固定プレート234が回転可能に接続されている。下部プレート232および羽固定プレート234のそれぞれには、中間プレート233が回転可能に接続されている。羽部は、固定プレート234に取り付け可能に構成されているとともに、アクチュエータ2から取り外し可能に構成されている。
(もっと読む)
往復揺動機構およびこれを用いた羽ばたき飛行機
【課題】 原動節と従動節が平行になる位置関係でも、従動節を回転させるトルクを生み、ストロークの大きい往復回転運動を実現する、構造が簡易で、小型、軽量の往復揺動機構を提供する。
【解決手段】 往復揺動機構は、上下方向直動部材1と、一端が枢支される剛体リンク3と、直動部材1と剛体リンク3との間を連結する弾性体リンク2とを具備する。直動部材1の運動を弾性体リンク2を介して剛体リンク3の揺動運動に変換する。弾性体リンク2は、直動部材1の昇降途上で撓みの中立点を越え、中立点の前後で反対方向へ撓む。弾性体リンク2は、直動部材1の上死点に至るまでに大きく撓んでエネルギを蓄え、上死点において、このエネルギにより剛体リンク3を下方回動させる回転トルクを生じる。また、直動部材1の下死点において、同じく弾性体リンク2が撓んで蓄えたエネルギにより、剛体リンク3を上方回動させる回転トルクを生じる。
(もっと読む)
昆虫型飛翔玩具の翼体、及び当該翼体を備える昆虫型飛翔玩具
【課題】昆虫の翅の厚さや模様等がそっくりな昆虫型飛翔玩具の翼体及び、当該翼体を設けて飛翔する昆虫型飛翔玩具を提供することを目的とする。
【解決手段】厚さ1000μm以下のSi又はSi化合物のシリコン基板15よりなり、昆虫の翅を模した外形を有するとともに、表面をエッチング処理して前記昆虫の翅脈を模した凹凸模様10を形成したことを特徴とする。
(もっと読む)
歩行玩具
【課題】単に前足と後足とを動かして前進するだけではなく頭部を動かしながら歩行させることができるとともに、頭部を交換することにより頭部の動きが異なり、飽きのこない歩行玩具を提供すること。
【解決手段】頭部4を揺動させながら前足2と後足3とを前後に回動させて歩行する、以下の要件を備えることを特徴とする歩行玩具。
(イ)前記頭部4は玩具本体1に着脱可能であること
(ロ)玩具本体1には前足2と後足3とに設けた支軸12、16を回動可能に支持する軸受13、17を設けたこと
(ハ)上記前足2の支軸12は上記頭部を揺動駆動する駆動部材22が着脱可能に形成されていること
(ニ)上記前足2が回動すると上記支軸12に装着した駆動部材22は前足2と連動して回動すること
(ホ)上記駆動部材22は上記頭部4に係合し、前足2の回動に連動して頭部4を揺動させること
(もっと読む)
羽ばたき飛行体
【課題】 特殊な翼構成とすることで、この翼の上下に羽ばたく形態が同一でも振り下ろし時の浮揚力の効率を向上させた羽ばたき飛行体を提供するものである。
【解決手段】 胴体1に左右一対の主翼10,20を備え、この主翼を羽ばたかせる駆動機構30を備え、胴体後部に尾翼3を備え、上記主翼を外周枠骨10A,20Aで形成するとともに主翼の長手方向Aに直交し胴体1の長手方向Bに平行する支持骨11,21を外周枠骨の内側に多数架絡させ、上記各支持骨には子羽の枢支側を胴体側として胴体の長手方向に揺動軸芯Oを合わせて支持し各子羽の自由端側が先端側の子羽に主翼の先端側に向けて下面側から重合状態に閉塞させ、各子羽を隙間無く重なり合った集合体の翼となした羽ばたき飛行体100である。
(もっと読む)
羽ばたき航空機
【課題】ホバリング能力が高く、狭い場所であっても飛行することが可能な羽ばたき航空機の提供。
【解決手段】軸2aを中心として羽ばたき動作する複数の翼31L,31R,32L,32Rを備え、翼31L,31R,32L,32Rは、羽ばたき動作時に少なくとも3箇所でクラッピング動作を行う。これにより、翼面同士の間に挟み込まれた空気が翼面に平行な方向に少なくとも3箇所で噴出し、推力を発生する。これにより、本発明の羽ばたき航空機は、空中でホバリングを行うことができる。
(もっと読む)
羽ばたき飛行機
【課題】複雑かつ重量な駆動制御回路装置を要することなく、回転モータを高速回転駆動して大出力を得るとともに、回転モータが出力する大出力を大きな機械的損失を伴うことなく羽ばたき運動に変換することにより、パワー伝達効率に優れ、加えて高い羽ばたき振動数で羽ばたき運動することにより機敏な高機動飛行をすることができる優れた羽ばたき飛行機を提供する。
【解決手段】共振型羽ばたき飛行機において、羽ばたき翼がフラッピング振動およびフェザリング振動の2自由度において連成共振振動する翼振動系を構成し、フラッピング振動支軸で軸支された羽ばたき翼により円周方向に慣性力を発生する振動モータを支持して設け、前記振動モータが発生する慣性力によりフラッピング振動トルクおよびフェザリング振動トルクを得る。
(もっと読む)
模型用ラジオコントロール送信機
【課題】機械的手段に依らず、被操縦体の可動部位の最大制御量を超えないように制御量を制限することができる模型用ラジオコントロール送信機を提供する。
【解決手段】操作部の操作に応じて被操縦体の可動部位の制御量を制御する制御信号を送信する模型用ラジオコントロール送信機において、操作部の操作による少なくとも二以上の制御量の加算量となる加算制御量を算出し、加算制御量が被操縦体の可動部位に応じて設定される最大制御量を超えるか否かを判定するとともに、加算制御量が最大制御量を超える場合には制御量が補正される。
(もっと読む)
魚様ロボット
【課題】 組み立て・解体が容易で点検・保守に便利な搭載品収納水密容器を備え、且つ単に水平方向に遊泳するだけでなく、3次元までの多様な運動が可能な魚様ロボットを提供する。
【解決手段】中空円筒21と,その中空円筒21の端部に嵌め込まれる円形端板23,24と,その円形端板23,24と中空円筒21の端部内面との隙間をシールするOリングと,を含む、搭載部品収納用水密容器20を備えている。また、尾鰭17を含む胴後部16を遥動させるところの、弾性変形容易な一枚の遥動板31を備えていると共に、その遥動板31の全て又は前側の一部を除く大部分を、その揺動板31を湾曲、揺動する駆動機構30とは別の駆動機構40によって胴本体部分15の鉛直対称面に対して左右に傾斜させ、折り曲げることが可能に構成されている。
(もっと読む)
魚状ロボット
【課題】 尾鰭や胸鰭の遥動によらずとも、この魚状ロボットを前進又は後退させることが可能な魚状ロボットを提供する。
【解決手段】尾鰭17を含む胴後部16を遥動させることによって水中を遊泳することが可能に構成されていて、重心を長手方向に移動する重心移動機構40によってこの魚状ロボット10に長手方向の傾きを与えたうえ、浮沈タンク31内の水量を変えることによってその魚状ロボット10の見掛け比重を調節し、それによって生じた、浮力と重力との差を推進力として、必ずしも、電力消費の大きい、尾鰭17を含む胴後部16の遥動によらずとも、この魚状ロボット10を前進又は後退させることが可能に構成されている。
(もっと読む)
潜水ビークル
船体軸を画定するとともに船体軸に沿って見た時に略環状を呈する外側船体を有する潜水ビークルであり、環状体の内部は、ビークルが液体に潜水する時に液体がダクトを満たすように、両端部で開口したダクトを画定する。ビークルはさらに、船体軸を中心にビークルを転回させるための手段を含む。浮力制御システムが設けられ、外側船体は船体軸に対して後傾している。ビークルを出動および使用する様々な方法が記載される。 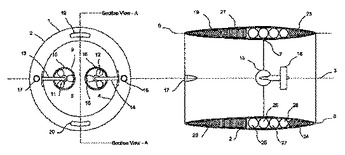 (もっと読む)
(もっと読む)
魚ロボット
【課題】 水深を一定又は略一定に保持するための浮沈制御機構が簡単で、その制御が容易な魚ロボットを提供する。
【解決手段】空気が封じ込まれたタンク61へ付設のポンプ63によって周囲の水が送り込まれ、沈降するよう構成された魚ロボットの水深を検知する水深センサ67による水深検出値Dtが目標水深Dsより小さく、且つ沈降速度Vが設定値Vs未満であれば、停止中のポンプ63が起動されるか又は運転中のポンプ63が引き続き運転されるよう制御され、他方前記水深検出値Dtが目標水深Dsより小さくても沈降速度Vが設定値Vs以上であるか、又は他方前記水深検出値Dtが目標水深Ds以上であれば、運転中のポンプ63が停止されるか又は停止中のポンプ63が引き続き停止されるよう制御される。
(もっと読む)
魚ロボット構造
【課題】 尾鰭を含む胴後部分がしなやかに揺動し、また浮上沈降時の動きが容易に制御可能である等、より自然魚に近い挙動をする魚ロボットを提供する。
【解決手段】ゴム様弾性体の外皮11で覆われ、水へ浸漬されると、剛体に閉じ込められた空気を除く、前記外皮11内の空気が、その外皮11内に進入する水によって容易に排出されるよう、前記剛体によって閉じ込められた部分を除く残りの部分がそれを包む外皮11の外と連通している。また、前記尾鰭16を含む胴後部15内に、弾性変形容易で左右に遥動することが可能な一枚の遥動板25、その部分の外皮11を内面から支持すると共に、容易に湾曲し、遥動することが可能な肋骨状部分30を備え、前記駆動機構20がその遥動板25、肋骨状部分35を介して前記尾鰭16を含む胴後部15を遥動させるよう構成されている。
(もっと読む)
1 - 20 / 28
[ Back to top ]