
Fターム[2F062AA71]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 角度 (231)
Fターム[2F062AA71]の下位に属するFターム
Fターム[2F062AA71]に分類される特許
81 - 100 / 148
リンク型変位計の計測管理方法
【課題】一の計測器の不具合や故障を迅速かつ正確に検知するリンク型変位計の計測管理方法を提供する。
【解決手段】被計測対象またはその近接位置に複数のリンク型変位計19を接続して設置する。前記リンク型変位計19は、被計測対象の変状に応答して変位可能な筒体21と、該筒体21の内部に該筒体21と同動可能に配置した変位検出部材23と、該変位検出部材23の変位を計測し、その計測デ−タを演算装置45へ出力可能な計測手段34とを備える。前記複数のリンク型変位計19により被計測対象の変状を計測するリンク型変位計の計測管理方法である。前記一のリンク型変位計19に見掛け上の角度出力が発生した際、該リンク型変位計19の両側に配置したリンク型変位計19の見掛け上の角度出力の発生の有無を基に、前記一のリンク型変位計19の不具合ないし故障を検知する。
(もっと読む)
動作コースの判定
アーチファクト(10)と、装置(28)との間の動作コースを判定するためのコンピュータ実施可能な方法。該装置(28)は、少なくとも1つの直線自由度(X、Y、Z)および少なくとも1つの回転の自由度(A1、A2)において、アーチファクトと装置とが互いに関連するように動作可能なアーチファクトと相互作用する。本方法は、アーチファクト(10)を表す幾何データを受け取ることと、装置(28)を表す幾何データを受け取ることと、1つまたは複数の最適化基準に準拠するように、装置およびアーチファクトをどのようにして相互作用経路に沿って互いに対して方向付けすることができるかを、前記幾何データから決定することと、を備える。  (もっと読む)
(もっと読む)
ボール溝測定方法

【課題】測定時のワーク中心軸に傾きがあっても正しいボール溝の測定が可能で、ボール溝加工精度の高精度検査を可能とし得るボール溝測定方法を提供する。
【解決手段】等速ジョイントのインナレース又はアウタレースのPCRを測定するボール溝測定方法であって、位置決めされたインナレース等の全ボール溝の延出方向各点の3D座標を測定する第1ステップ303〜308と、このステップで測定された3D座標群から仮のボール溝中心軸を求める第2ステップを備える。第3ステップ309では仮のボール溝中心軸によるPCR値を複数算出し、第4ステップ310〜311では算出されたPCR値群に基づいて全ボール溝に共通の球面を含む球体を求める。上記球体と3D座標群から真のボール溝中心軸を演算する第5ステップ312を備え、第6ステップ313ではその真のボール溝中心軸によるPCR値を算出する。このPCR値の再算出によれば、ワーク中心軸が傾いたままボール溝測定を行っても正しいPCR値が得られる。
(もっと読む)
形状測定装置および方法
【課題】 急傾斜面を接触式プローブにより測定すると、安定して接触力を制御することができず、高精度で高速な形状測定を行なう事ができなかった。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、接触式プローブの軸方向の変位と、接触式プローブの姿勢とを測定し、その測定結果から、接触式プローブが被測定物から受ける接触力ベクトルを計算し、接触力ベクトルの大きさが一定になるように、接触式プローブを前記接触力ベクトルと直交する方向に移動させる。
(もっと読む)
ねじ形状測定方法
【課題】一般的な三次元測定機を利用してねじ形状の各種特性値の測定を行うことができるねじ形状測定方法を提供すること。
【解決手段】測定すべきねじ形状を有するワークが装着される三次元測定機と、この三次元測定機に装着される倣いプローブと、この倣いプローブに装着されかつワークに接触される接触部を有するスタイラスとを用い、前記倣いプローブの倣い測定軸線と前記ねじ形状の中心軸線とを合わせる軸合わせ工程(処理ST4)と、前記スタイラスを前記ねじ形状に接触させつつ前記倣いプローブを前記倣い測定軸線に沿って移動させる倣い測定工程(処理ST5、ST8)と、前記倣い測定で得られた測定データから前記ねじ形状の各種特性値を演算する演算工程(処理ST7、ST9)と、を実行する。
(もっと読む)
測定装置、成型装置、転写装置および測定方法
【課題】感圧紙等のテスト部材を用いることにより、型の姿勢を従来よりも正確にしかも効率よく測定する。
【解決手段】第1の部材7の平面に対する第2の部材の平面5の傾きを測定する測定装置において、薄い板状に形成され圧力を受けたときに前記圧力の大きさに応じて色合いが変化するテスト部材であって前記各部材の各平面で押圧されて色合いが変化したテスト部材TPの色合いを画像処理することによって、前記第1の部材の平面に対する前記第2の部材の平面の傾きを算出する算出手段17を有する。
(もっと読む)
形状測定方法
【課題】スタイラスの傾きを検出する角度検出器の取付角度誤差を容易に補正する形状測定方法を提供する。
【解決手段】被測定物の測定面を第1の方向に走査して算出される接触点位置座標データと第1の方向に相反する第2の方向に走査して算出される接触点位置座標データが一致するような角度誤差推定値を角度検出器の取付角度誤差として校正して形状測定する。
(もっと読む)
光ファイバ担持用スペーサの反転ピッチ及び反転角度の測定装置及び測定方法
【課題】螺旋溝の反転ピッチ及び反転角を正確に測定することができる光ファイバ担持用スペーサの反転ピッチ及び反転角度の測定装置及び測定方法を提供する。
【解決手段】測定装置は、反転角エンコーダ55からの角度信号のカウンタ値が加算からθ(5度)減算、または、減算からθ(5度)加算された第1基準点D1における位置信号が示す第1基準位置と、第1基準点D1のθ(5度)前の反転タイミングからさらにθ(5度)前の第2基準点D2における位置信号が示す第2基準位置と、の中点を求めることにより反転位置Tを算出し、算出した反転位置T等に基づいて反転ピッチP及び反転角度を算出する。
(もっと読む)
三次元形状測定装置
【課題】スタイラス軸方向のフォーカス変位と傾斜角度を精度良く、スタイラス質量をほとんど増やさず、信頼性良く検知できる三次元形状測定装置を提供する。
【解決手段】互いに直交する方向に偏向した太い光束径のフォーカス検出光213と細い光束径の傾き測定光221を偏光プリズム37で合成し、スタイラスに貼られたミラー123にレンズ14で集光し、反射光を偏光プリズム37で異なる光路に分離し、フォーカス検出光の反射光からスタイラス軸方向変位を光検出器34で検出し、傾き測定光の反射光からスタイラス軸方向傾斜角度を傾斜角度検出部222で測定する。
(もっと読む)
真円度測定装置、真円度測定方法、及び真円度測定プログラム
【課題】偏心が大きい場合であっても、高精度で偏心が求められる真円度測定装置、真円度測定方法、及び真円度測定プログラムを提供する。
【解決手段】真円度測定装置は、接触検出時において回転軸Oと測定子24とを結ぶX軸上の回転軸Oと測定子24の表面との間の距離を測定距離として取得し、回転角度を測定角度として取得する測定値取得部を有する。さらに、真円度測定装置は、偏心距離e、偏心角度αを計算する偏心位置計算部と、偏心距離e、偏心角度α、測定角度θ、ワーク4の半径R、及び測定子24の中心から表面までの長さ(半径Rtip)に基づき、ワーク4と測定子24との接触する接触点Pから回転軸Oまでの距離OPとなるように測定距離を補正し、回転軸Oを中心とするX軸と接触点Pとの間の補正角度γを測定角度に加算する補正を行う測定値補正部とを備える。
(もっと読む)
角度測定方法及び角度測定装置
【課題】 ワークの外周面の傾斜角度を正確に測定できる角度測定方法および角度測定装置を提供すること。
【解決手段】 本発明の角度測定方法は、ワーク5の表面50の第一の部位50aと第一の所定の位置との間の第一の距離(L1)を測定する工程と、ワーク5の表面50の第二の部位50bと第二の所定の位置との間の第二の距離(L2)を測定する工程と、第一の距離(L1)、第二の距離(L2)および第一の所定の位置と第二の所定の位置との間の距離(L)から、第一の所定の位置と第二の所定の位置とを結ぶ方向に対するワークの表面がなす角(θ)を算出する工程と、を有することを特徴とする。
(もっと読む)
座標測定方法および座標測定装置
【課題】ワークピース200上の座標を測定する方法において、高い精度とプローブ150の早い移動とを合わせ備える。
【解決手段】位置決め用プラットフォーム60には、順次、ロータ100、プローブ150、針123とその先端のコンタクトボールが固定されている。針123は、回転軸65に対して角度αだけ傾斜している。結果的に、測定地点は軸65に対して距離「r」だけオフセットとなる。針123の傾斜は、適切なアクチュエータによって自由に設定して、円筒形の孔の内面206を走査するようにすることができる。プローブ150の相対位置をプローブ・エンコーダによって測定し、位置データと結合させることでワークピースの特定局部測度を得て、ワークピース200上の座標を得る。
(もっと読む)
形状測定方法及び装置
【課題】測定プローブを移動させる移動装置の基準点に対する測定プローブの測定球の位置ずれの影響を低減させ、正確な3次元座標の測定を可能にする。
【解決手段】基準球18上に設定された各格子点に対して、理論法線方向から測定プローブ15をアプローチさせて測定プローブ15の変位方向及び変位量を検出し、検出された変位方向と理論法線方向との差並びに検出された変位量と理論変位量との差を求め、これを各格子点における理論法線方向と関連付けて検出誤差データテーブルを作成する。測定プローブ15を被測定物13の基準形状に沿って移動させながら測定プローブ15の変位量及び変位方向を検出し、測定プローブ15と被測定物13の表面との摩擦が変位量に与える影響を補正するための摩擦補正量と検出誤差データテーブルとにより補正した変位量及び変位方向に基づいて、接触点の3次元座標を求める。
(もっと読む)
形状測定方法及び装置
【課題】被測定物の表面から受けた抗力の方向に変位しないタイプの測定プローブを用いた場合でも、目標点の3次元座標の正確な測定を可能にする。
【解決手段】測定ヘッド29に対して3次元変位可能に測定球33を支持しており3次元座標系における測定ヘッド29に対する測定球33の変位量を検出可能になっている測定プローブ15を用い、測定プローブ15を目標点に向けてアプローチさせ、測定球33を測定ヘッド29に対して変位させた後、このときの測定球33の変位の方向から測定プローブ15を被測定物13に再度アプローチさせることを繰り返す。そして、アプローチの方向と測定ヘッド29に対する測定球33の変位の方向とが概略一致したときの測定球33の変位量と測定ヘッド29の3次元座標位置とに基づいて接触点における被測定物13の3次元座標を求める。
(もっと読む)
雌ねじの有効径測定装置
【課題】精度良く雌ねじの有効径を測定することのできる有効径測定装置を提供する。
【解決手段】この装置は、雌ねじの内部に挿入されて同雌ねじの歯溝に各別に係合する二つの係合部26,27を備える。二つの係合部26,27は、互いの間隔を変更可能に設けられており、コイルスプリング25の付勢力によって互いに離間する方向に付勢されている。二つの係合部26,27の間隔を検出するための距離センサ31と、二つの係合部26,27を繋ぐ仮想線と雌ねじの中心軸に直交する方向に延びる仮想面とのなす角度を検出するための距離センサ32とが設けられる。
(もっと読む)
表面測定装置および方法
例えば、バルブ・シートなどの表面構造の寸法と位置を決定する方法を提供する。構造の表面は、例えば、接触プローブを持つ螺旋状の走査パスを用いて測定され、走査から取得された複数のデータ・ポイントは、デジタル化されたイメージを作り出すのに使用される。 デジタル化されたイメージは、表面構造の公称イメージ(例えば、CADデータ)に合わせられる。デジタル化されたイメージの公称イメージからのずれは、表面構造の寸法、位置、および形状ずれのうちの少なくとも一つを決定するために用いられる。 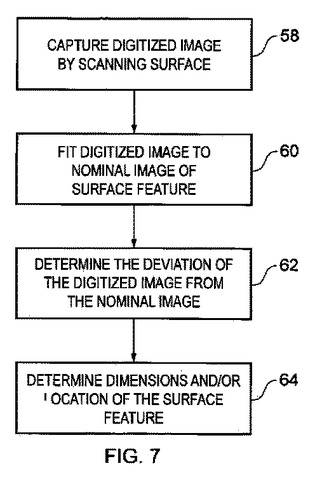 (もっと読む)
(もっと読む)
表面粗さ測定装置
【課題】表面粗さ測定装置において、小型化を図りやすくすることである。
【解決手段】表面粗さ測定用の触針58の軸方向変位に対応する角度変位を検出可能な角度検出センサ36と、検出した角度変位から触針58を押し付ける測定面の表面粗さを求める制御部とを備える。触針58を有するアーム部34を、ケース16に対し触針58の軸方向に対し直交する方向の変位を可能に支持した変位部材32に、揺動中心軸56を中心とする揺動変位を可能に支持する。角度検出センサ36は、アーム部34の揺動中心軸56を中心とする角度変位を検出可能とする。
(もっと読む)
発泡体厚み測定装置
【課題】本発明は、発泡体の発泡倍率、厚み、形状に関係なく、且つ人が発泡体を押さえることなく厚みを精密に測定できる接触式発泡体厚み測定装置を提供すること。
【解決手段】
本発明の接触式発泡体厚み測定装置は、発泡体に均一荷重をかけることで載置表面と密着させる荷重治具と測定物に一定測定力にした接触式発泡体厚み測定装置。
(もっと読む)
管継手の締め付け角度判定方法及び管継手の締め付け角度判定治具
【課題】締め込み状態の確認を簡単且つ正確に判定することのできる管継手の締め付け角度判定方法及び、その判定に用いられ管継手の締め付け角度を簡単に判定することのできる治具を提供する。
【解決手段】板状体の一辺に設けられて管継手10の外周面に当接して管継手に対する前記一辺の位置決めを行う切欠き凹部20bを備えるとともに、切欠き凹部20bを管継手の外周面に当接させた状態で、切欠き凹部20bに近接した位置で管継手10の経線方向に設けられた基準スリット20cと、基準スリット20cに対して規定角度傾斜した位置に設けられた判定用スリット20fとを備えた角度判定治具20を使用し、本締め後に切欠き凹部20bを継手10の外周面に当接させ、雌ナット12の外面に記入された基準線21aと基準スリット20cとを直線状に配置した状態で、雄ナット11の基準線21bが判定用スリット20f内にあるときに合格と判定する。
(もっと読む)
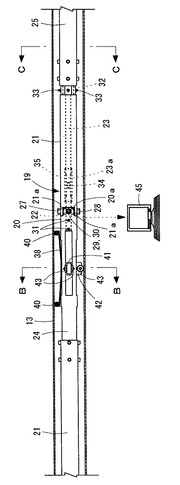
高架橋柱の最大応答部材角測定装置及び高架橋柱の損傷レベルの評価方法
【課題】安価で、かつ無電源方式の機械式センサーを用いて、直接的に高架橋柱の最大変形量を測定することができる高架橋柱の最大応答部材角測定装置を提供する。
【解決手段】高架橋柱の最大応答部材角測定装置において、基礎1に構築される高架橋柱2と、この高架橋柱2の下部に位置し、この高架橋柱2に沿って固定される測定棒5と、前記高架橋柱2に支持されて水平方向に延びる固定材4と、この固定材4の移動に伴って移動可能であり、この固定材4の移動後に前記測定棒5に係合保持される移動材6を具備する。
(もっと読む)
81 - 100 / 148
[ Back to top ]