
Fターム[2F062AA71]の内容
機械的手段の使用による測定装置 (14,257) | 測定内容 (2,477) | 角度 (231)
Fターム[2F062AA71]の下位に属するFターム
Fターム[2F062AA71]に分類される特許
41 - 60 / 148
車両のホイールアライメント調整方法
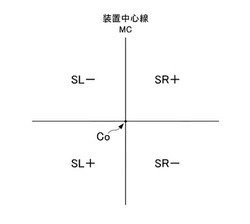
【課題】専用の評価装置を設けることなく、アライメント調整装置でスラスト角を調整できる車両のホイールアライメント調整方法を提供すること。
【解決手段】本発明の車両のホイールアライメント調整方法は、車両の左右前後の車輪の位置を検出するステップと、予め設定されている装置中心線MCに平行な方向への車輪13、14のずれ量を測定するセットバック量測定ステップと、左右の車輪13、14の装置中心線MCに直交する方向の距離を測定するトレッド量測定ステップと、測定ステップにより測定したセットバック量Sおよび後軸トレッド量TBに基づいて、スラスト角θを算出するステップと、を備える。
(もっと読む)
真円度測定装置

【課題】本発明の解決すべき課題は、切り欠きを有する被測定物、あるいは小径穴の内面測定を行う際にも測定プログラムを停止することなく連続測定を行うことのできる真円度測定装置を提供することにある。
【解決手段】被測定物を載置する回転テーブル14と、
前記被測定物24の略円形測定面に傾斜接触する接触式スタイラス26と、
前記スタイラス26を所定ストローク範囲内で傾斜角変更可能に保持する保持手段40と、
前記スタイラス26と前記測定面との接触に伴う、前記スタイラス26の傾斜角変位を検出する変位検出手段42と、
前記変位検出手段42の出力に基づき、前記スタイラス26先端位置を推測し、該スタイラス位置における最適ストローク範囲を保持手段に指示する制御手段32と、
を備えたことを特徴とする真円度測定装置。
(もっと読む)
三次元測定装置
【課題】 ある点の測定後のスタイラス(測定ヘッド)のセンター(原位置)への復帰を瞬時に自動的に正確に行える三次元測定装置を提供すること。
【解決手段】 スタイラス(測定ヘッド)を原位置に復帰せしめるべくプローブユニット内に配設される、スタイラスと同軸上に延在するセンターピンと同一部材から製造されるとともにセンターピンと平行に延在する一対のストッパーピンを挟持して前記センターピンの外径と同一間隔を規定する、相対向し水平移動する一対のリミッタと、該リミッタをその背面から押圧付勢する圧縮ばねからなるセンターピンX方向復帰機構およびY方向復帰機構をZ軸方向に二層に配設したセンターピン復帰機構を有してなる三次元測定装置。
(もっと読む)
形状測定装置、その校正方法、及び校正プログラム
【課題】高精度な校正が可能な形状測定装置、その校正方法、及び校正プログラムを提供する。
【解決手段】形状測定装置は、被測定物4を載置すると共にZ軸を中心として回転可能なテーブル5と、被測定物4に接触可能な測定子24と、測定子24を、互いに直交するX軸、Y軸及びZ軸のうち少なくともX軸及びZ軸方向に駆動する手段と、測定子24のY軸方向の位置を校正するための制御部41とを有する。制御部41は、テーブル5に載置された被測定物4の一部として含むY軸を中心として傾斜した傾斜平面若しくは傾斜円筒側面、又は中心軸がX軸方向にずれた偏心円筒側面を、回転させながら倣い測定することにより得られた測定値の最小値が得られたテーブル5の回転角度を最小検出角として求める手段と、最小検出角に基づいて測定子24のY軸方向の位置を調整する調整量を算出する手段とを含む。
(もっと読む)
誤差補正方法及びこれを用いた部品測定方法
【課題】本発明は、測定装置のコストを低減し、且つ測定精度を保障する誤差補正方法及びこれを用いた部品測定方法を提供する。
【解決手段】前記誤差補正方法は、プローブ及びガイドを備える測定装置を提供するステップと、ガイドの真直度誤差を測定して補正するステップと、プローブの取付傾斜角をフィッティングするステップと、プローブの形状誤差を計算するステップと、系統誤差補正プログラムを生成するステップと、を含む。前記部品測定方法は、前記誤差補正方法を通して系統誤差補正プログラムを生成するステップと、曲面又は曲線を有する部品を提供するステップと、前記測定装置を使用して、部品の曲面又は曲線を測定するステップと、ガイドの真直度誤差を測定して補正するステップと、プローブの取付傾斜角による誤差を補正するステップと、プローブの形状誤差を補正するステップと、プログラムにより測定誤差を生成するステップと、を含む。
(もっと読む)
形状測定機、及び形状測定方法
【課題】被測定物の形状を適切に測定することができる形状測定機、及び形状測定方法の提供。
【解決手段】三次元測定機1は、被測定物に当接する測定子と、測定子を移動させるスライド機構24、及び駆動機構25と、スライド機構24、及び駆動機構25を制御するホストコンピュータ5とを備える。ホストコンピュータ5は、測定子の内部に設定された所定の点を仮測定点として仮測定点の位置を時系列で取得する仮測定点取得手段51と、仮測定点取得手段51にて取得された仮測定点の位置と、測定子の表面形状をモデル化した測定子モデルとに基づいて、測定点の位置を推定して取得する測定点推定手段52とを備える。測定点推定手段52は、対象モデル配置部521と、領域設定部522と、前後モデル配置部523と、範囲設定部524と、測定点取得部525とを備える。
(もっと読む)
形状測定装置用プローブ及び形状測定装置
【課題】水平面に近い形状を有するときにも高精度かつ低測定力で測定が可能なプローブを提供する。
【解決手段】直動部6は鉛直方向にのみ直動可能に取付部2に支持される。揺動部3は、測定物60の被測定面61に接触するスタイラス121を先端に備えるアーム112を有する。連結機構4は、揺動部3側の支持部材42の尖端を直動部6側の載置台41に形成された溝41aに嵌入することで、揺動部3を直動部6に対して揺動可能に連結する。揺動側磁石51と非揺動側磁石52との間の磁気的吸引力により、アーム112を鉛直方向に向ける付勢力が揺動部3に作用する。可動側磁石71と固定側磁石72との間の磁気力により、直動部3に鉛直方向上向きの付勢力が作用し、直動部3は取付部3に対して鉛直方向に非接触で保持される。
(もっと読む)
角度測定器
【課題】容易な構成で仰角、俯角を検出でる角度測定器得る。
【解決手段】ヘルメット1aの鍔に、角度測定器7を設ける。この角度測定器7は、回動自在な垂直指示バー9(透明アクリル板)と、透明角度検知板8と、水平板10等からなり、透明角度検知板8の上面は支持部材12、13によって挟持され、この支持部材12、13の上面12a、13bが水平板10に固着する。透明角度検知板8は、中央部に水平線の0度のラインがあり、これから所定間隔で上側に黄色部8a、ピンク色部8b、緑色部8cを形成し、下方は青色8d、紫色部8e、黄緑部8fを形成し、それぞれに視野方向の角度を割りあてる。
(もっと読む)
形状測定方法及び測定機能を有する機械
【課題】テーブルに固定されているワークの測定基準面が傾いている場合でもワークの形状を精度良く測定することができ、測定作業を簡単に行うことができる形状測定方法及び測定機能を有する機械を提供する。
【解決手段】測定ヘッド9がワーク7に対してアプローチする複数の測定動作方向を画面に表示するステップと、複数の測定動作方向のうちからワーク7の測定基準面2にアプローチするいずれか一つの測定動作方向を選択するステップと、ワーク7の測定基準面2上の3点の座標値を選択された測定動作方向へアプローチさせて測定するステップと、測定した3点の座標値に基づき測定基準面2を装置1の主軸3の軸線CLに対して垂直に向けるのに必要とされる回転送り軸の割出し角度を演算するステップとを含み、ワーク7の形状を測定する。
(もっと読む)
プローブのアライメント調整方法および形状測定機
【課題】作業者の熟練度に左右されることなく、プローブの角度を能率的かつ高精度に調整することができるプローブのアライメント調整方法および形状測定機を提供。
【解決手段】軸部の先端に接触部を有するプローブと被測定物とを相対移動させるとともに、その相対移動方向に対して直交しかつ軸部と交差する方向からプローブの移動軌跡画像を撮像する工程ST2と、撮像されたプローブの移動軌跡画像から相対移動方向を示す基準直線L1および軸部の傾きを示すプローブ軸線L2を抽出する工程ST3と、抽出された基準直線L1に対するプローブ軸線L2の傾きを演算して求める工程ST4と、求められたプローブ軸線L2の傾きに基づいてプローブの傾きを調整する工程ST6とを備える。
(もっと読む)
表面粗さ測定センサを有する装置および関連方法
本発明に係る装置(10)は、表面粗さ検出システム(12)および表面粗さ測定センサ(15)を備え、スライド部品およびプローブ先端部(15.4)が協働して作動する装置である。スライド部品は、走査スライド部品(15.3)の形態として、プローブピン(15.2)の最端部に配置される。プローブ先端部(15.4)は、プローブピン(15.2)の内部に配置され、走査スライド部品(15.3)とプローブ先端部(15.4)との間の距離(A)は予め設定されている。表面粗さ検出システム(12)は、平行四辺形構造体を有する1次元、2次元、または3次元の走査システムである。この装置(10)は、走査スライド部品(15.3)およびプローブ先端部(15.4)とともにプローブピン(15.2)を、走査すべき面(F)上で一体的に搬送する搬送デバイスを備えるものである。同様に、本発明は、上記装置(10)を用いた関連する方法に関する。  (もっと読む)
(もっと読む)
ホイールアライメント計測装置
【課題】簡素な構成にすることにより、軽量化を図ると共に、車両への設置自由度を高くすることができるホイールアライメント計測装置を提供する。
【解決手段】車体側取付部31に対してX軸周りに回転可能に支持される門形回転部材33と、門形回転部材33に対してY軸周りに回転可能に支持されるシリンダ部材41aと、このシリンダ部材41aに対してZ軸方向に変位するロッド41bとを有する伸縮機構部材41と、伸縮機構部材41に対してZ軸周りに回転可能に支持される枠状回転部材52と、枠状回転部材52に対してX軸周りに回転可能に支持され、ホイール4に装着されるホイール取付部59をその回転軸周りに回転可能に支持する回転部材55と、計測された各部材33,51,55,41aの回転角度及びロッド41bの変位に基づいて、ホイール4のX軸,Y軸,Z軸方向の変位量、トー角度変化量、キャンバ角度変化量を演算する演算器14とを備える。
(もっと読む)
チップ角度測定方法及びチップ角度測定装置
【課題】複雑な構成を採用することなく、短時間に且つ容易に溶接用電極チップがワークに対して鉛直に位置決めされているか否かを確認する。
【解決手段】本発明に係るチップ角度測定方法を実施するためのチップ角度測定装置26は湾曲する第1把持部30と、第2把持部32とを有し、前記第1把持部30の第1アーム34a、第2アーム34bの間に第1検出部60aが設けられ、第2把持部32を構成する第3アーム50a、第4アーム50bの間に第2検出部60bが設けられる。第1把持部30と第2把持部32は互いに接近したとき緊締部44によって固定される。第2電極チップ22がワークWに当接したとき、第1検出部60aと第2検出部60bの針部82が同じ目盛を示せば、ワークWが第2電極チップ22に対して鉛直に接していることを確認できる。
(もっと読む)
サーフボードのフィン取付角度調整器
【課題】 フィンの角度を正確、且つ、簡単に任意の角度に設定できると共に作業性を向上でき、かつ、フィンを正確に取り付けることが可能なサーフボードのフィン取付角度調整器を提供する。
【解決手段】 フィン取付角度調整器1は、ゲージ基台20,30に取り付けられた第1,第2のゲージ40,50と、ゲージ基台20,30が両側に取り付けられた横長の本体部10とを備える。第1のゲージ40は、固定設置された第1の基準板41と、これに重なるようにして回動自在に設けられた第1の角度設定板42を有し、同様に、第2のゲージ50は、第2の基準板51と第2の角度設定板52を有する。第1,第2の角度設定板42,52の角度を設定した後、本体部10の長さを調整し、サイドフィンの内側の面を第1,第2の角度設定板42,52の角度設定面405,505に合致させれば、角度調整(角度設定)は完了する。
(もっと読む)
V溝形状測定方法および装置
【課題】回転テーブル上の被測定物のV溝形状の特性値を正確かつ確実に測定する。
【解決手段】測定子方向一定制御工程と、回転テーブル半径一定倣い制御工程と、2面接触倣い制御工程とを組み合わせ、被測定物のV溝を構成する2面に、常に倣いプローブ22の測定子24を接触させるV溝回転テーブル倣い制御工程を行い、プローブ22の倣い進行方向を、プローブ22の測定子24の中心位置の軌跡から求めて、倣い制御処理を行う。
(もっと読む)
形状測定用プローブ制御装置
【課題】形状測定装置において、低測定力を維持したまま高速にプローブを測定面に追従させることができ、高速で高精度な測定を実現できる形状測定用プローブ制御装置を提供する。
【解決手段】X制御モード切換スイッチ41とY制御モード切換スイッチ45とを備え、測定物の形状、または測定時のXプローブ傾斜角度θXとYプローブ傾斜角度θYとの関係により、一方の軸で位置制御を、他方の軸で傾き制御を行うようにした。
(もっと読む)
形状測定装置用プローブ及び形状測定装置
【課題】任意形状の被測定面を、被測定物を回転させることなく高精度で測定可能な、形状測定装置用プローブ及び形状測定装置を提供する
【解決手段】プローブ1は、揺動部材3、取付部材4、及び連結機構5を備える。揺動部材3は、測定物2の被測定面2aに接触するスタイラス8と、形状測定装置6が備える同一の集光レンズ23を通って集光されるレーザ光22a〜22cが照射されるミラー21a〜21cとを備える。揺動部材3は取付部材4によって形状測定装置6に取り付けられる。連結機構5は取付部材4に固定された載置台11と、揺動部材3又は載置台11に固定された支点部材12とを備える。揺動部材3は支点部材12の先端12bを支点として揺動可能である。
(もっと読む)
形状測定装置及び形状測定方法
【課題】スタイラスを測定面に接触させながら走査し、順次座標を読み取ることにより測定面の形状測定において、スタイラスを測定面に沿って滑らかに走査し、高精度かつ高速な形状測定を実現する。
【解決手段】移動ベクトル算出部は、スタイラス32が測定面5aを走査中、前記スタイラス変位ベクトルと、スタイラス32と測定面5aとの摩擦力によって発生するスタイラス変位ベクトルDの方向変化角度θとに基づいて、プローブの移動量と移動方向とを示す移動ベクトルMを算出する。スタイラス変位ベクトルDはプローブ6に対するスタイラス32の位置の変位量と変位方向とを含むベクトルである。移動ベクトルMに従ってプローブ6が移動するようにXYステージ7の移動を制御する。
(もっと読む)
形状測定装置、形状測定方法及び形状測定プログラム
【課題】測定点を正確に算出する。
【解決手段】擬似測定点を取得する擬似測定点取得部212と、各擬似測定点から被測定物の表面へと向かう大凡の方向にガイドラインを生成するガイドライン生成部213と、接触子の表面形状を特定する接触子モデルの基準点を擬似測定点に一致させると共に測定時の接触子と接触子モデルとの姿勢を一致させて接触子モデルを配置する接触子モデル配置部214と、各ガイドラインと各配置された接触子モデルの表面とが交わる交点を取得する交点取得部215と、各ガイドライン上における交点の中から擬似測定点から最も離れた交点を測定点として取得する測定点取得部216と、接触子モデルの定義範囲に従い測定点を削除する測定点削除部217を備える。
(もっと読む)
測定装置
【課題】長尺の断面直線形状や面形状の測定における水準器と多点法の利点だけを有効に使い、大面積の被測定面を迅速に高精度に測定できる測定装置を提供する。
【解決手段】被測定試料の置かれたステージと多点法プローブを保持するセンサホルダが互いに相対的に移動をして直線形状を走査測定する装置において、移動する側のセンサホルダまたはステージの走査方向の傾斜角を測定することの出来る水準器を備えていて、前記水準器によって走査移動の開始点と終了点での前記移動側物体の傾斜を測定することで、多点法プローブのゼロ点調整誤差をその場校正する。
(もっと読む)
41 - 60 / 148
[ Back to top ]