
Fターム[2F063DA01]の内容
電気磁気的手段を用いた長さ、角度等の測定 (19,512) | 測定方法 (3,108) | 測定対象物を非接触で測定するもの (1,066)
Fターム[2F063DA01]に分類される特許
221 - 240 / 1,066
位置検出装置
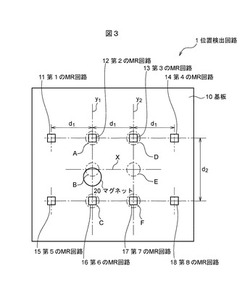
【課題】2重系の位置検出系統を1つの被検出体で実現し、かつ、小型化することができる位置検出装置を提供する。
【解決手段】位置検出装置1は、シフトレバー3の操作に応じて第1〜第3の移動線y1、y2、xに沿って移動するマグネット20と、第1の移動線y1に対しd1だけ離間する第1のMR回路11と、第1の移動線y1の直下に配置される第2のMR回路12と、第2の移動線y2の直下に配置される第3のMR回路13と、第2の移動線y2に対し第2のMR回路12とは反対側でd1だけ離間する第4のMR回路14と、位置判定部40とを備える。この位置判定部40は、第1及び第3のMR回路11、13の出力に基づいて第1の移動線y1上のマグネット20の位置を判定し、第2及び第4のMR回路12、14の出力に基づいて第2の移動線y2上のマグネット20の位置を判定する。これにより、1つのマグネットで2重系の位置検出を実現する。
(もっと読む)
測定値のサブセットを識別する方法および装置、対象物の位置を特定する方法およびシステム、これらの方法のための記録媒体

磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、a)磁界を放射するステップ、およびN個の実際の測定値のセットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いてこれらの磁界を測定するステップ(70)と、b)N個の測定値の中のサブセットMiに基づいて、対象物の位置の推定値Piを算出するステップ(72)と、c)推定位置Piと、対象物の位置をN個の測定値から成るセットに関連付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップ(74)と、d)ステップc)中に推定された測定値をステップa)中に求められた実際の測定値と比較することによって、この測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)とを有する。 (もっと読む)
デジタイザシステムに使用するためのスタイラス
【課題】圧力検出を行う共振型スタイラスを提供する。
【解決手段】スタイラス端、スタイラス端に適用される圧力に応じて移動する、スタイラス中に位置される少なくとも1つの移動要素、および前記移動要素の運動時に弾性要素に捩り力が適用され、前記弾性要素の捩り力が前記移動要素の運動に対抗し、前記移動要素を前記運動の前に存在した状態に戻すように、前記少なくとも1つの移動要素の外周の周りに適合され、かつスタイラスの外被に連結される少なくとも1つの弾性要素、を含む、デジタイザシステムに使用するためのスタイラスとする。
(もっと読む)
金属物の形状判定方法
【課題】金属物の形状を判別して検知できる金属物の形状判定方法を提供する。
【解決手段】センサーコイル5,6を用いて、被検出物2中に混入した金属物を検知する。センサーコイル5,6から出力される検出信号を信号処理解析して、金属物の形状を判定する。解析のとき、被検出物2がセンサーコイル5,6に入力するタイミングから、センサーコイル5,6を通過して出ていくタイミングまでの信号を規格化して規格化信号にし、規格化信号の中に、3以上のピーク値があるとき、針であると判定する。規格化信号の中に、2個のピーク値のみがあるとき、鉄粉であると判定する。
(もっと読む)
ポジションセンサ
本発明は、磁気素子(34)用の少なくとも1つのガイドレール(36,38)を有するガイドハウジング(14)を備えたポジションセンサ(10)に関する。ガイドハウジング(14)には、リードフレーム構造部(50)および/または導体路(40)を電気絶縁しかつ/または固定する射出成形部(48)が収容されている。射出成形部(48)は、磁気素子(34)用の紛失防止手段(42,44)を形成する。 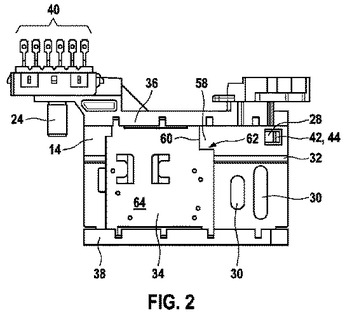 (もっと読む)
(もっと読む)
回転角検出装置、モータ制御装置、および電動パワーステアリング装置
【課題】モータ等の回転機におけるロータの回転速度が変化しても現時点のロータ回転角を正確に推定できる回転角検出装置を提供する。
【解決手段】ホールセンサによるロータ回転角の離散的な検出結果から現時点のロータ回転角を示す回転角推定値θreを次のようにして求める。ロータ回転角が検出される毎にその前の検出時点ti-1から今回の検出時点tiまでの期間での平均的な角速度を示す角速度算出値ωc(i)を求める(i=0,1,2,…)。ロータ回転の加減速を考慮すべく、現時点の直前の検出時点tkで得られた角速度算出値ωc(k)を、その角速度算出値ωc(k)と更に前の検出時点tk-1で得られた角速度算出値ωc(k−1)との比に応じて補正することにより、角速度推定値ωeを求める。当該直前の検出時点tkから次の検出時点tk+1まで、この角速度推定値ωeを用いて回転角推定値θreを算出する。
(もっと読む)
センサ装置
【課題】薄型化並びに部品点数の削減による低コスト化と組立作業性の向上を図る。
【解決手段】第1及び第2の絶縁基板3,4の表面に印刷形成された第1検出コイル30A,30B,40A,40Bのインピーダンスが直線軌道上を変位する検出体51A,51Bの位置に応じて変化することを利用して直線上を移動する対象物の移動量や位置などを検出することができる。しかも、検出コイルが巻回されたボビンに導電性筒体を進退自在に外挿する従来例と比較して、検出コイル30A,30B,40A,40B並びに検出体51A,51Bを薄く且つ小さくすることができる。その結果、薄型化並びに部品点数の削減による低コスト化と組立作業性の向上が図れる。
(もっと読む)
回転角検出装置の製造方法
【課題】コンデンサに対する樹脂の流動によるストレスを低減する。
【解決手段】磁気検出部材44をインサートして樹脂で1次モールドすることによりセンサ本体40を形成する工程と、センサ本体40の取付ターミナル49に配線ターミナル54を連結する工程と、センサ本体40と配線ターミナル54とをインサートして樹脂で2次モールドすることによりセンサカバー30を形成する工程とを備える。センサ本体40の樹脂モールド部52に、配線ターミナル54の取付側に開口する空洞部53を形成する。配線ターミナル54にコンデンサ103を連結する。空洞部53にコンデンサ103を収容した状態で2次モールドを行う。
(もっと読む)
回転入力装置および携帯機器
【課題】ユーザの回転操作に基づいて入力が行われているという感覚をユーザに明確に与えるとともに、ユーザの回転操作を正確に認識することが可能な回転入力装置を提供する。
【解決手段】この回転入力装置4は、ユーザによる操作によりキャップ部41が回転された際に、静電容量式エンコーダ43による検知結果に基づいてキャップ部41に回転方向の力に抗する抵抗力を付与することによりユーザに触感を付与する励磁コイル44を備え、静電容量式エンコーダ43は、キャップ部41に対して常時隙間L2を隔てて対向するように配置され、キャップ部41の回転に伴って回転する回転プレート431およびロータ部432と、ロータ部432に対向するように配置されたステータ部433とを含み、ロータ部432とステータ部433との静電容量の変化に基づいて、キャップ部41の回転角度を検知するように構成されている。
(もっと読む)
回転角検出装置及びスロットル制御装置
【課題】磁気検出部材のセンシング部に加わる樹脂の応力を軽減する。
【解決手段】回転角検出装置40は、スロットルギヤ22の回転にともなう磁気の変化を検出する磁気検出部材44を備える。磁気検出部材44が樹脂でモールドされる。磁気検出部材44は、磁気の変化を検出するセンシング部45と、センシング部45の出力信号に基づいた演算を行って磁気の変化に応じた信号を出力する演算部47とを備え、センシング部45と演算部47とがL字形状をなしている。磁気検出部材44のセンシング部45に外側から重なる保護部45(P)、及び、保護部45(P)を支持する支持部47(P)を備える保護部材44(P)が設けられる。磁気検出部材44をモールドする樹脂(樹脂モールド部52)が発泡樹脂である。
(もっと読む)
操向トルク及び操向角測定装置並びにこれを備えた車両用操向装置
本発明は操向トルク及び操向角測定装置に係り、出力軸に固定されるステータと、ステータの内面に配置され、入力軸に固定されるマグネットと、ステータとマグネットとの間で発生する磁場を感知して操向トルクを測定するトルクセンサーと、通常はON信号を出力し、出力軸が回転すると、出力軸の定められた回転区間毎にOFF信号を出力して操向角を測定する操向角信号発生部と、を含む。これにより、部品数を減らし、製造工程を単純化し、コストを節減することができる。 (もっと読む)
ドア開閉装置
【課題】回転センサの検出精度を向上し、また装置全体を小型軽量化する。
【解決手段】クラッチ32を周囲に配置した回転軸32Aの端部側に回転センサ35を設ける。また、回転センサ35は、磁気抵抗素子35Cc(異方性磁気抵抗素子)を電磁クラッチが生じる磁束に対して交差する永久磁石35Bdの磁束を検出する位置に固定してある。このため、異方性磁気抵抗素子は、クラッチ32が励磁されたときの磁界の影響を受けない。この結果、回転センサ35の検出精度を向上できる。さらに、モータベース36の外部に回転軸32Aの一端部を延出して回転センサ35を設けることで、金属製のモータベース36を小型軽量化できる。
(もっと読む)
複数のセンサー素子に対するセンサーエレクトロニクスおよびセンサー素子における物体の位置を決定する方法
複数のセンサー素子に対する複数の接続を有している電子回路が提供される。電子回路は、少なくとも1つの多重化法において、センサー素子の少なくとも1つの観測範囲における物体の存在を検出することと、センサー素子を区別することとを行うように構成されている。センサー素子の少なくとも1つの観測範囲にある少なくとも1つの物体の位置をセンサー素子に対して決定する方法も提供される。多重化法において、それぞれの観測範囲における物体の存在を示す各センサー素子に対する電気的な変数が検出される。 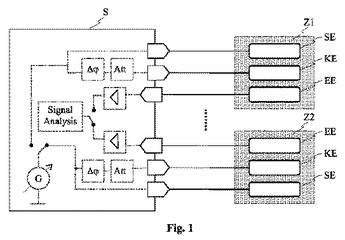 (もっと読む)
(もっと読む)
回転角度検出装置及びこれを用いた回転角度・トルク検出装置
【課題】主に自動車のステアリングの回転角度や回転トルクの検出等に用いられる回転角度検出装置、及びこれを用いた回転角度・トルク検出装置に関し、簡易な構成で、高分解能な回転角度や回転トルクの検出が可能なものを提供することを目的とする。
【解決手段】第二の検出歯車13の歯数を第一の検出歯車2の歯数の1/2以下に形成すると共に、制御手段17が第一の検出手段5からの検出信号を、所定倍にして演算することによって、第一の検出歯車2と第二の検出歯車13の検出信号の位相差信号Tから、回転歯車1の概略の1回転以上の回転角度の検出が行えると共に、歯数の小さな第二の検出歯車13を用いて、より高分解能で高精度な回転角度の検出を行うことが可能な回転角度検出装置を得ることができる。
(もっと読む)
回転角検出装置、および、これを用いた電動パワーステアリング装置
【課題】故障などにより異常となった出力信号を特定可能な回転角検出装置を提供する。
【解決手段】ブリッジ回路11、12は、被検出部87の回転に応じて変化する回転磁界によりインピーダンスが変化するセンサ素子21〜28により構成されるハーフブリッジ14〜17を有する。信号取得手段は、ハーフブリッジ14〜17の中点31〜34から出力される出力信号をハーフブリッジ14〜17ごとに取得する。回転角算出手段は、信号取得手段により取得された出力信号に基づき、被検出の回転角度θを算出する。異常特定手段は、信号取得手段によって取得される少なくとも4つの出力信号に基づく値である演算値が所定の範囲から外れた場合、当該演算値に対応する出力信号を異常出力信号として特定する。これにより、故障などによりどの出力信号が異常となったかを特定することができる。
(もっと読む)
ピストンロッド位置情報をピストンロッド上の磁性層に記録するシステム及び方法
【課題】ピストンロッド上の磁性層内にピストンロッド位置情報を記録するためのシステム及び方法を記載する。
【解決手段】シリンダに対して運動しているピストンロッド上に、記録媒体を構成する磁気的に硬い層が形成されている。磁気パターンが前記磁気的に硬い層内に記録されている。磁界センサが、前記ピストンロッドが前記シリンダに対して運動している間に前記記録された磁気パターンを感知し、前記磁気パターンに応答して、前記ピストンロッドの瞬時位置を求めるために用いられる信号を発生する。
(もっと読む)
ポンプライン線形位置検出アセンブリ
2ピースのカラー10は二つのショルダーボルト14を介して油圧駆動装置のシャフト12に堅固に固定されている。カラーのそれぞれ半分16は、直線状のセンサーシャフト22に組みつけられているスプール20上のぴったりと許容する溝構造18と係合している。スプール20は、センサ26に位置信号を送る磁石24を収容している。作動中に油圧駆動装置のシャフト12が往復すると、スプール20はそれに沿って移動し、駆動装置28の向きを変えるためにセンサ26に位置信号を送信する。油圧駆動装置及び化学ポンプのシャフト12は時間をかけてゆっくりと回転することができ、それは化学ポンプ/油圧駆動装置のシールの寿命を長くするために好ましい。 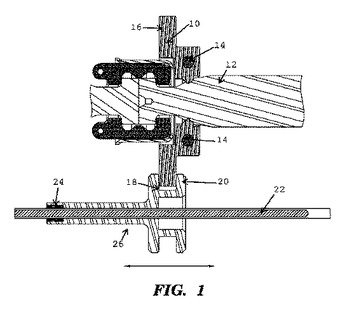 (もっと読む)
(もっと読む)
セラミック金属インターロック部品並びにその製造及び使用方法
【課題】セラミック金属インターロック部品並びにその製造及び使用方法を提供すること。
【解決手段】複合素子が提供される。複合素子は、第1の端部及び第2の端部を有するキャビティを画成するセラミック部品と、ヘッド及び本体を含む金属部品とを含む。金属部品の本体の少なくとも一部がキャビティ内に配置され、金属部品のヘッドが、キャビティの第1の端部上に配置される。本体の一部の断面積は第1の端部の面積よりも大きい。加えて、セラミック部品と金属部品がインターロックされる。複合素子を製造する方法及びクリアランスセンサ部品を製造する方法も提供される。
(もっと読む)
ポインティングデバイス
【課題】従来よりも小型で薄型であり、複雑な補正用ソフトウェアを作成することなく、高い操作感を備えた磁気検出式ポインティングデバイスを提供すること。
【解決手段】磁石103を備えた平行に揺動可能な操作部材と、操作部材の所定の方向への移動を検出するセンサ101a乃至101dと、センサのセンサ出力を信号処理する信号処理部104と、信号処理部104の信号処理の結果を出力する出力制御部108とを有している。磁石は、ホールセンサを実装した平面において直交するX軸方向及びY軸方向の長さよりも傾斜軸方向の長さが大きい形状を有している。
(もっと読む)
回転角度検出装置
【課題】磁性検出体の偏心量を小さく構成し、回転時の不具合の低減を図ることができる回転角度検出装置を提供する。
【解決手段】磁性検出体11は、円盤状をなし、径方向内側部分には外周面11cからの磁性部分11dの長さdを回転方向に徐々に変化させる溝部11bを備えてなる。そして、回転方向においてのその磁性部分11dの長さdの変化に基づく交番磁界の変化が磁気センサ12にて検出され、該検出により磁性検出体11の絶対角θ1の検出が行われる。
(もっと読む)
221 - 240 / 1,066
[ Back to top ]