
Fターム[2F065BB02]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 平面平板(長手方向を特定できない) (2,611) | パターン有(プリント基板、フォトマスク) (1,360)
Fターム[2F065BB02]に分類される特許
81 - 100 / 1,360
線幅測定装置、画像処理装置、画像処理システム及びプログラム
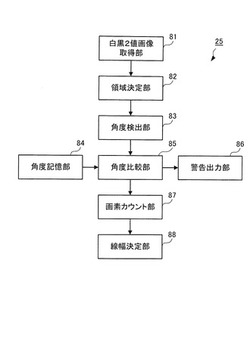
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
検査方法および装置

【課題】パターンの線幅情報の測定不良を抑制する。
【解決手段】表面検査方法は、基材と、その基材の表面を被覆し、かつ繰り返しパターンが形成された下地部とを含むウェハの表面に光を照射し、その光が照射されたウェハの表面からの反射光の光強度情報を、受光光学系の測定面で検出するステップ128と、その測定面において、第1位置での第1光強度の検出信号を求めるステップ130と、その下地部の情報とその第1光強度の検出信号とを用いて、その繰り返しパターンの線幅の情報を求めるステップ140とを含む。
(もっと読む)
構造の電磁散乱特性を計算し、近似構造を再構築する方法及び装置
【課題】回折格子の輪郭を再構築するCSIアルゴリズムを開示する。
【解決手段】電流密度Jの体積積分式を解くには、Jの近似解を求めるように、E及びJの連続成分を選択することにより、電場ES及び電流密度Jに関連するベクトル場FSの暗示的構築を使用し、Fは1つ又は複数の材料境界にて連続している。Fは、少なくとも1つの方向x、yに関して少なくとも1つの有限フーリエ級数で表され、体積積分式を数値的に解くステップは、Fの畳み込みによってJの成分を決定することを含み、畳み込み演算子Mは、両方向の材料及び幾何構造の特性を含む。Jは、両方向に関して少なくとも1つの有限フーリエ級数で表すことができる。連続成分は、E及びJに作用する畳み込み演算子PT及びPNを使用して抽出することができる。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
カメラ校正方法
【課題】ステレオ法を用いた三次元測定に適したカメラ校正を行い、三次元位置の測定における測定精度を向上させることができるカメラ校正方法を提供すること。
【解決手段】複数の特徴点が設けられ、各特徴点の相対位置が既知である校正器を撮像する(S2)。撮像した校正器の画像情報から校正器の特徴点を抽出する(S3)。2つのカメラそれぞれのカメラパラメータの初期値を算出する(S4)。算出したカメラパラメータを用いて、2つ以上の特徴点の三次元位置座標を算出する(S5)。三次元位置座標を算出した各特徴点のうち、2つの特徴点間の距離を算出する(S6)。算出した距離と実際の距離との誤差を算出する(S7)。算出した誤差を用いてカメラパラメータの修正量を算出する(S8)。算出した修正量の分、カメラパラメータを修正して更新する(S9)。
(もっと読む)
ウエハの特性決定のための方法とシステム
【課題】ウエハの特性を決定するための方法とシステムを提供する。
【解決手段】検査システム16を用い、ウエハからの光に対応する出力を生成することを含む。出力は、ウエハ上の欠陥に対応する第一出力と、欠陥に対応しない第二出力とを含む。また本方法は、第二出力を用い、ウエハの特性を決定することを含む。一つのシステム16は、ウエハに光を当て、ウエハからの光に対応する出力を生成するように設定された検査サブシステムを備える。出力は、欠陥に対応する第一出力と、欠陥に対応しない第二出力を含む。また本システムは、第二出力を用い、ウエハの特性を決定するように設定されたプロセッサを備える。
(もっと読む)
欠陥検出方法及び欠陥検出装置
【課題】被検査物が複雑な形状である場合でも、精度よく欠陥を検出することができる欠陥検出方法及び欠陥検出装置を提供する。
【解決手段】欠陥検出方法は、撮像工程により被検査物を撮像し、エッジ検出工程により得られた画像データに基づいて、構造パターンの外周形状であるエッジを検出し、ライン検出工程により、エッジの最外周画素の集合であるラインを検出し、構造ライン取得工程によりエッジが境界となる複数の構造パターンに対してそれぞれに接するラインである構造ラインを取得し、エッジ幅取得工程により2つの異なる構造ライン間の距離をエッジ幅として取得し、平均エッジ幅算出工程により同じ構造ライン上の任意の2点を始点及び終点として設定し、始点から終点までの平均エッジ幅を取得する。そして、欠陥検出工程により、平均エッジ幅とエッジ幅とを比較し欠陥を検出する。
(もっと読む)
半導体装置の製造方法および半導体装置
【課題】下層および上層に形成したデバイスパターン間のズレ量を現状で実施されている方法よりも高精度に計測可能な半導体装置の製造方法および半導体装置を提供すること。
【解決手段】実施形態によれば、半導体装置の製造方法が提供される。半導体装置の製造方法は、パターン形成工程と、開口部形成工程とを含む。パターン形成工程では、第1層に位置ズレ計測用のパターン111と第1パターン101とを形成する。開口部形成工程では、前記第1層よりも上層に積層した第2層103に前記位置ズレ計測用のパターン111を露出させる開口部と第2パターン102とを形成する。
(もっと読む)
マルチカメラのキャリブレーション用全周フィールド
【課題】マルチカメラをキャリブレーションする場合の被写体であって、カメラごとに被写体を移動させることなく、高精度なマルチカメラのキャリブレーションが可能な全周フィールドおよびその撮影方法を提供する。
【解決手段】全周フィールドは、基準方向に光軸を有する基準カメラ11と、基準方向とは異なる方向に光軸を有する他のカメラ12とを有するマルチカメラ10aで撮影し、キャリブレーションするための全周フィールド1であって、マルチカメラ10aの内部パラメータまたは外部パラメータを測定するために撮影される、全周フィールド1内に配置された、三次元座標が既知の複数のターゲットを備える。基準方向から所定の角度範囲においては、ターゲットが第1の密度で配置され、基準方向から所定の角度範囲の範囲外においては、ターゲットが第1の密度よりも高い第2の密度で配置される。また、全周フィールド1の法線は、少なくとも2方向を有する。
(もっと読む)
しわ発生判別方法、プログラム、速度計測装置、形状計測装置、しわ発生判別装置及び画像形成装置
【課題】幅広いシート材種に対してシート材のしわ発生の余裕度を評価し、しわの発生を予防する技術を提供する。
【解決手段】波打ち形状算出手段が、ニップ部におけるシート材の搬送方向と直行する方向の搬送速度分布を記憶手段から読み出して(S1)、搬送速度分布からシート材の波打ち形状を算出し(S2)、しわ発生判別手段が、波打ち形状算出手段により算出された波打ち形状に基づいてシート材にしわが発生するか否かを判断する(S3、S6、S7)。
(もっと読む)
散乱計測定の改良システムおよび応用
【課題】回折構造体の測定パラメータモデルを利用する分光散乱システムおよび方法を提供する。
【解決手段】モデルの固有値を事前計算し、記憶し、ある共通の特性をもつ他の構造体に対して後に再利用する。1つ以上のパラメータの値を求めるために用いられる散乱データは、下敷フィルム特性に対して感度が低くなる波長におけるデータだけに制限することが可能である。代表的な構造体をスラブ200’(i)のスタックにスライスし、各スラブの近似を行うため四角形ブロック210,212,214,216,218のアレイを作成することによって三次元グレーティングに対するモデルを構築することが可能となる。
(もっと読む)
半導体チップ搭載装置及び半導体チップ搭載方法
【課題】搭載対象のチップが良品であるか否かを判断しながら搭載処理が行えるようにする。
【解決手段】 複数のチップにダイシングされたウェハ5の周縁位置を複数撮影する撮影手段12,14と、撮影手段12,14により撮影されたウェハ5の周縁位置の画像データに基づき、ウェハ5の外縁をなすウェハ5円の中心位置及び直径を含むウェハ情報を算出するウェハ情報算出手段15と、予め設定されたチップサイズ及びウェハ情報に基づき、搭載するチップの中心位置及び当該チップにおける所定箇所のコーナ位置を含むチップ情報を算出するチップ情報算出手段15と、チップ情報に基づき、チップのコーナ位置がウェハ5円の内側に位置するか否かを判断し、ウェハ5円の内側に位置する場合には、当該チップは搭載可能な良品であると判断する良品判断手段15と、チップが良品と判断された場合に、当該チップの搭載を行う搭載実行手段と、を備える。
(もっと読む)
マスク検査方法およびその装置
【課題】検査時間および労力を低減できるマスク検査方法およびその装置を提供する。
【解決手段】実施形態によれば、マスク検査方法は、半導体露光用マスクに任意波長の光を入射させ撮像部にて像を取得する光学系を用いて、前記マスクの欠陥の有無を検査する方法であって、予め前記光学系による点像を、前記撮像部の読み出し方向に伸長される制御条件を取得する第1ステップ(S203)と、前記制御条件により、マスクの所望の領域の像を取得する第2ステップ(S205)と、取得した前記所望の領域の像において、信号強度が予め定めておいた第1閾値以上であり、前記信号強度の前記読み出し方向における差分が予め定めておいた第2閾値以下であるピーク信号が存在する場合、前記ピーク信号の座標を欠陥として判定する第3ステップ(S206)とを具備する。
(もっと読む)
計測方法、ステージ装置、及び露光装置
【課題】周囲の気体の屈折率変動の影響を低減させて、ステージの位置決め精度等を向上できる露光装置である。
【解決手段】投影光学系(PL)を介してウエハステージ(WST)上のウエハ(W)に露光用の照明光を照射して、ウエハ(W)に所定のパターンを形成する露光装置であって、ウエハステージ(WST)に設けられたスケールと、このスケールの位置情報を検出する複数のXヘッド(66)と、複数のXヘッド(66)を一体的に支持し、線膨張率がウエハステージ(WST)の本体部よりも小さい計測フレーム(21)と、複数のXヘッド(64)の検出結果からウエハステージ(WST)の変位情報を求める制御装置とを備える。
(もっと読む)
移動情報測定装置
【課題】移動体の曲面からの信号に関してデフォーカスによる信号振幅減少を低減し、移動情報の検出精度の低下を抑制する。
【解決手段】光源と、移動方向に曲面を備える移動体と、前記曲面からの集光された反射光または透過光を受講する受光素子と、を有する移動情報測定装置において、前記曲面が移動方向に複数種の曲率を備える。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】欠陥検査装置のレシピで設定するセル領域の設定を自動化する方法を提供する。
【解決手段】CellMatAreaの区別をCellMatAreaと非CellMatAreaのGrayLevelの分布特徴の差を用いてイメージをスキャンして、その結果からCellMatAreaと非CellMatAreaを分ける方法を取った。具体的にはCellMatの始点と終点を区別するための基準になる閾値をMemoryCellだけあるAreaで計算した後、その閾値を適用して始点と終点を探してそのそれぞれを繋げてCellAreaを作成した。
(もっと読む)
検査装置および検査方法
【課題】過度の欠陥検出を抑制することにより、不必要な欠陥修正を低減することのできる検査装置および検査方法を提供する。
【解決手段】センサ106からマスク101の光学画像を取得するし、光学画像におけるパターンの寸法と、判定の基準となる基準画像におけるパターンの寸法とを測定し、これらから第1の誤差を求める。マスク101上の光学画像と基準画像について各転写像を推定し、これらの転写像におけるパターンの寸法を測定して第2の誤差を求める。各転写像を比較し、差異が閾値を超えた場合に欠陥と判定する。欠陥と判定された箇所における第2の誤差を第1の誤差で補正する。
(もっと読む)
パターン形状検査方法及びその装置
【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
81 - 100 / 1,360
[ Back to top ]